基于联合波束赋形的无人机辅助通信网络上行传输技术
2022-03-30 09:15:56许方敏史文策冯涛陶艺文赵成林
电子与信息学报 2022年3期
许方敏 史文策 冯涛 陶艺文* 赵成林
①(北京邮电大学信息与通信工程学院北京100876)
②(工业和信息化部中国机电设备招标中心北京100142)
1 引言
近年来,无人机(Unmanned Aerial Vehicle,UAV)辅助通信系统凭借机动灵活,可控能力强,易于部署等优点,成为无线通信领域国内外学者广泛研究的热点。针对通信质量不好的环境,传统的基站静态部署将难以满足未来移动网络的需求,亟待采用更加灵活机动的基站优化部署[1]。并且,随着云存储、高清视频电话以及社交网络等新业务的出现,用户上行通信性能保障也变得更重要,传统通信以下行为主的模式将会发生改变。
无人机辅助地面用户节点完成上行传输的通信场景存在多项挑战,例如保障信号传输的低时延、极远传输距离以及更大的通信速率等。为保障无人机上行传输的通信性能,文献[2]通过设置和优化无人机飞行轨迹来提高接收信号的信噪比与系统吞吐量,但地面用户通信场景相比于传感器节点通信场景更加复杂,用户位置变化,根据用户位置部署无人机飞行轨迹复杂性高。文献[3–5]研究了此场景下,视距通信模式中的干扰问题,未对系统上行通信性能做出提高。此外,在此通信场景下,存在无人机被遮挡的情况并非完全视距通信。文献[6,7]运用了非正交多址接入(Non-Orthogonal Multiple Access, NOMA)技术,进行上行传输,优化子信道分配,实现节点上行传输过程中系统容量最大化。NOMA技术可以容纳一定的用户数量,提高频谱的利用率,但由于干扰消除技术解码方式复杂,用户侧存在自身局限性,不能支持大规模NOMA用户对,且对用户节点优良信道依赖性高[7]。文献[8,9]分别验证了分布式波束赋形算法在中继网络中增大发射节点数量、发射功率使得接收信号信噪比提高。但在系统通信过程中,未考虑节点的位置变化因素,并且还需要一定的计算量。文献[10]提出了一种中继节点系统发射功率受限情况下提升信噪比的二分算法,而针对无人机辅助通信的场景并未考虑位置信息、发射方向等因素。
此外,现有一些方法从调制方式出发,采用单载波时域均衡(Single Carrier Frequency-Domain Equalization, SC-FDE)和正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM)调制方式[11],提高频谱利用率,改善系统性能。但在多用户上行传输时要实现各个用户相位同步是非常困难的,对相位噪声和载波频偏十分敏感,大大降低接收信号的信噪比[12]。此外,基于全向发射信号方法中,用户全向发射信号至目标点,用户时分复用信道,并且对于目标点位置无特殊要求,在任意方向都可收到相同的信号增益[13],但此方法目标接收到的信号信噪比小,通信速率慢,用户发射功率利用率低,并不符合多用户无人机上行通信的性能要求。
针对辅助网络中上行通信场景存在的问题,本文首次提出了一种基于联合波束赋形的无人机辅助通信网络上行传输技术。在本上行通信方法中,各个用户应首先明确无人机的所在方向,再向无人机方向打出波束。本文所提技术就无人机辅助通信网络中,用户对无人机定位主要面临两项难点。第一,不同位置的用户向无人机发送信号,无人机处接收信号为所有用户信号的相干合成信号;然而,用户运用分布式波束赋形发射方式,在无人机处的合成信号能量主瓣范围较窄,并且由于波束覆盖范围较小,对目标的搜索能力也相应地降低。因此,用户节点对无人机定位的准确率要求较高。第二,无人机作为空中基站具有一定的飞行轨迹,但在飞行过程中,并不是完全的视距通信链路,无人机存在被建筑物、树木等障碍物遮挡的情况,此时用户接收到的无人机的无线信号较弱甚至无法收到无人机的信号,用户无法对无人机进行准确定位,无人机处于时隐时现的情况。针对用户的目标定位部分,应实时掌握无人机的位置信息。
常用的基于距离的节点定位算法包括到达时间算法(Time Of Arrival, TOA)、到达时间差算法(Time Difference Of Arrival, TDOA)、到达角度测距算法(Angle Of Arriva, AOA)以及基于信号强度值测距算法(Received Signal Strength Indication, RSSI)等常用定位技术;基于测距方法包括基于三边测量的最小二乘法(Least Squares Method,LS)、三角测量法、最大似然估计法(Maximum Likelihood Estimation, MLE)[14],其中三边测量法与最大似然估计法类似,运用最小二乘算法进行定位求解。此外,粒子滤波算法有效地应用在目标定位领域,其根据目标状态为先验状态,对目标状态信息进行估计,其定位的准确率相比于基于距离的节点定位算法更高,但计算量也较大[14,15]。文献[14]对比了不同距离测量算法的性能,TDOA测距方法的准确率更高,但硬件成本、功耗较高;而RSSI测距方法虽然准确率较低,但其算法简单,硬件成本与功耗更低。文献[16,17]验证了粒子滤波算法定位性能更高,并且相比于传统的贝叶斯滤波算法、卡尔曼粒子滤波算法[18],可以有效解决非线性非高斯类问题的求解,并且粒子滤波算法相比于传统滤波算法计算量大大减小。但是,针对无人机辅助通信网络场景中用户定位无人机的难点问题,普通的粒子滤波算法与卡尔曼滤波算法并不能有效解决无人机被遮挡情况下的定位问题[19,20]。而伯努利粒子滤波算法,可以有效解决目标时隐时现的定位问题,在目标状态连续未知的情况下准确定位。因此,本文采用基于RSSI的伯努利粒子滤波算法完成用户对无人机的定位问题。在保障定位成本功耗低的情况下,能够对无人机准确定位,有效解决无人机被遮挡情况下的定位问题。
针对上述情况,本文首次提出一种基于联合波束赋形的无人机辅助通信网络上行传输技术,首次在无人机辅助通信网络中,地面用户运用分布式波束赋形的发射方式完成上行传输,将地面不同位置的用户视作“分布式的天线阵列”,向无人机发送信号,在无人机处得到信号的最大增益。设用户间已完成发射信号的互相传递[13],忽略用户间在传递过程中发射信号的相位偏差对最后接收信号造成的干扰;首先,对无人机进行定位,地面用户在得到发射信号的具体方向后,确定无人机所在方向的导向矢量,地面用户节点运用分布式波束赋形算法调整各自发射方向的相位发送信号,使得在目标方向上取得最大信号增益。本文的联合波束赋形发射技术相比于NOMA发射技术,用户数量局限性更小,对优良信道依赖性低,具有更快的通信速率。相比于用户全向发射信号发射技术,在区域内形成的信号增益只在无人机处形成最大增益,用户节点发射功率利用率更高,通信速率更快。
2 系统建模
本文所提出的基于联合波束赋形的无人机辅助通信网络上行传输技术,核心创新点为在无人机辅助通信网络中,地面用户首次采用合作的分布式波束赋形发射方式完成地面用户到无人机的上行通信。本文所提技术的实现包括两部分:用户对无人机进行定位;用户运用分布式波束赋形发射方式完成通信过程。针对这两部分的实现过程,分别通过基于RSSI的伯努利滤波无人机定位跟踪算法和基于分布式波束赋形技术的上行通信技术来完成。本节首先确立了无人机辅助通信网络的系统模型;并对基于RSSI的伯努利滤波定位跟踪算法中所涉及的定位问题、无人机广播信号的传播方式进行数学建模。
2.1 无人机辅助的通信系统模型
当地面用户节点数量很大时,在与传统基站进行上行传输,常会发生网络拥塞的情况,上行传输速率低下。针对这一现象,建立无人机辅助通信网络覆盖部分地面用户,降低与传统基站通信的用户数量,运用无人机辅助通信网络帮助部分地面用户完成上行传输,从而提升地面用户上行传输速率。在无人机辅助通信网络中进行上行传输信号,主要包括两阶段:一是,用户节点对无人机进行准确定位;二是,运用本文中的分布式波束赋形方法向无人机发送信号。无人机在飞行过程中的广播信号会被建筑物、树木等进行遮挡,用户节点对无人机定位应保证在无信号时刻的准确定位。用户节点运用分布式波束赋形算法发送信号至无人机所在方向应保障通信速率的提高。考虑无人机网络的上行通信场景[21],如图1所示。
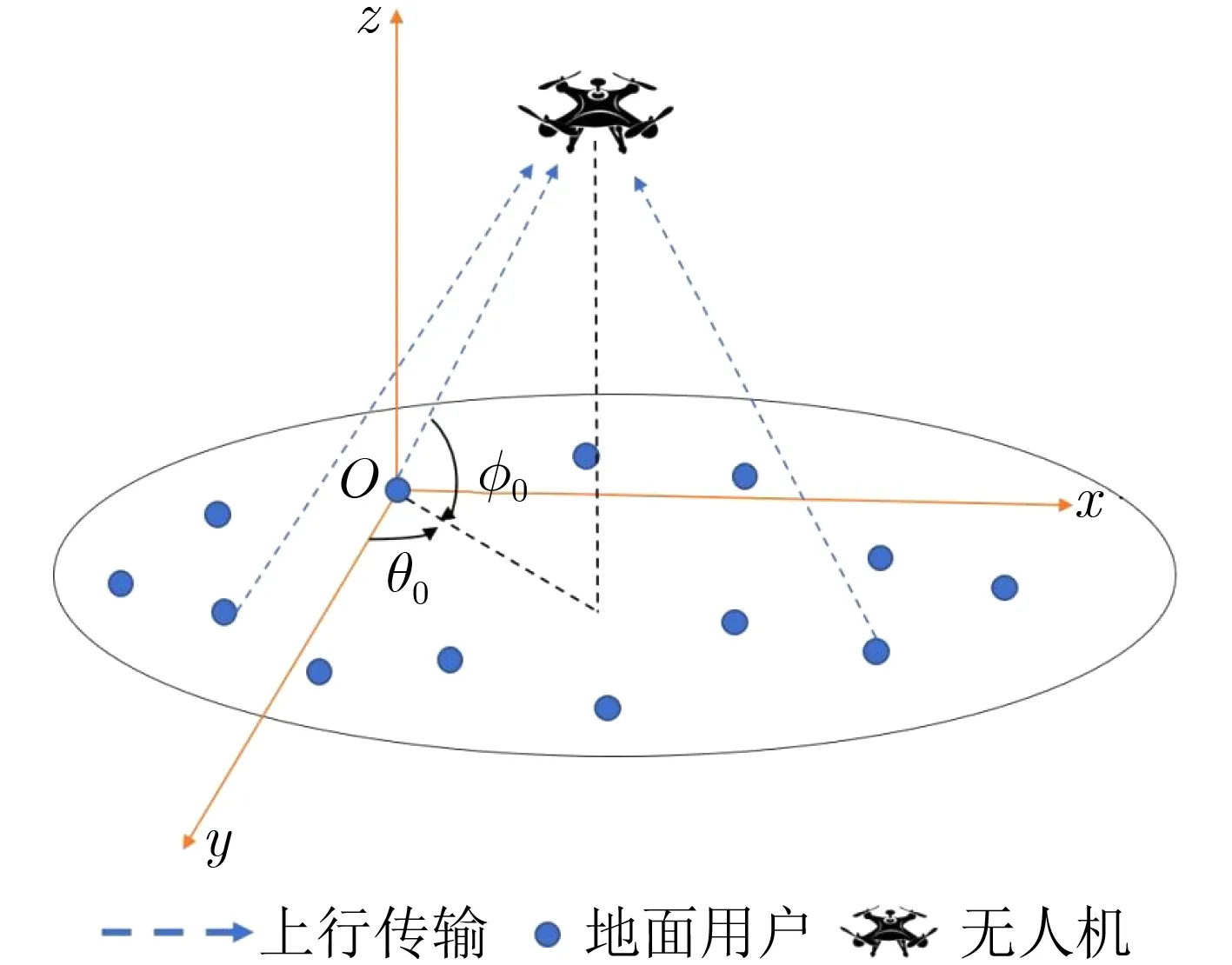
图1 无人机网络上行通信图
在无人机通信网络中,无人机按照一定的飞行轨迹飞行,无人机k时刻的位置为(x(k),y(k),z(k)),记为Xk;由于用户具有一定的移动性,设不同时刻下用户的位置随机出现,但在上行波束赋型训练期间静止,此时M个地面用户位置随意分散,任意选取一个用户作为坐标系原点为参照点。在完成无人机定位后,通过无人机当前位置信息(x(k),y(k),z(k))计算出无人机相对于坐标系所在的方位角为θ0,俯仰角为φ0。k时刻无人机到参考用户O的距离为R0,到第m个用户的距离为Rm。所以,k时刻任意用户节点相对于参考用户,由距离产生的相对时延为

确定用户节点相对于参考节点O到无人机位置的相对时延τm后,计算出每个用户节点相对于参考节点O发送信号的相位差:

其他用户根据与参考点发送信号的相位差来确定k时无人机相对于单个用户的位置方向;地面用户节点在确定无人机方向后,向无人机所在方向运用分布式波束赋形算法发送信号。
2.2 定位建模
在对无人机进行定位时,为了预测无人机下一时刻的位置信息,无人机状态方程建模为离散时间下的随机过程,对无人机建立运动学模型,对用户接收信号建立观测模型[15,17,19,20],可表示为

2.3 无线信号传播建模
在对无人机进行定位阶段中,用户根据接收无人机广播信号的强度值Zk对无人机位置进行伯努利滤波定位。首先确定无人机无线信号的传播模型,已知节点的无线信号的发射功率为PT,用户节点的接收功率为PR,发送节点与用户节点的距离为d,具体表示为

其中,n是传播因子,数值大小取决于无线信号的传播环境[23]。将式(6)的无人机发射功率与节点的接收功率转换为dBm的表达式,对式(4)进行对数处理,即为
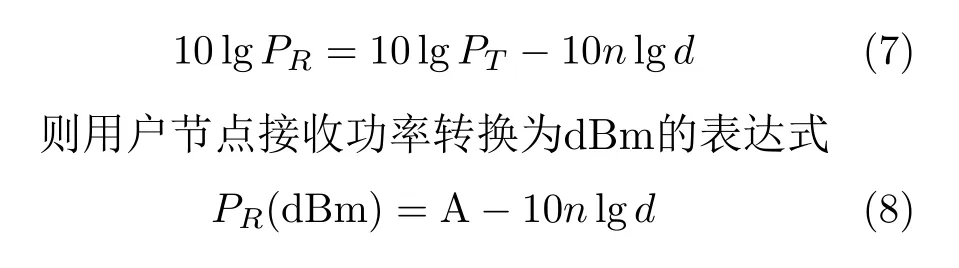
由式(6)可以得到用户节点与传播距离的关系,其中A为常数,A值的大小与传播因子n值的大小对接收节点功率产生影响。如图2所示,当无人机的发射功率一定时,即A值不变,传播因子n的大小反映了无线信号在传播过程中受到的衰减、反射、多径等干扰,n取值越小代表信号在传播中受到的干扰越小,基于RSSI的测距定位就会越精确。复杂环境下传播因子n较大,Zk信号值衰减严重且受噪声干扰造成振荡,复杂环境下Zk信 号值稳定性较差,使得定位精度下降。
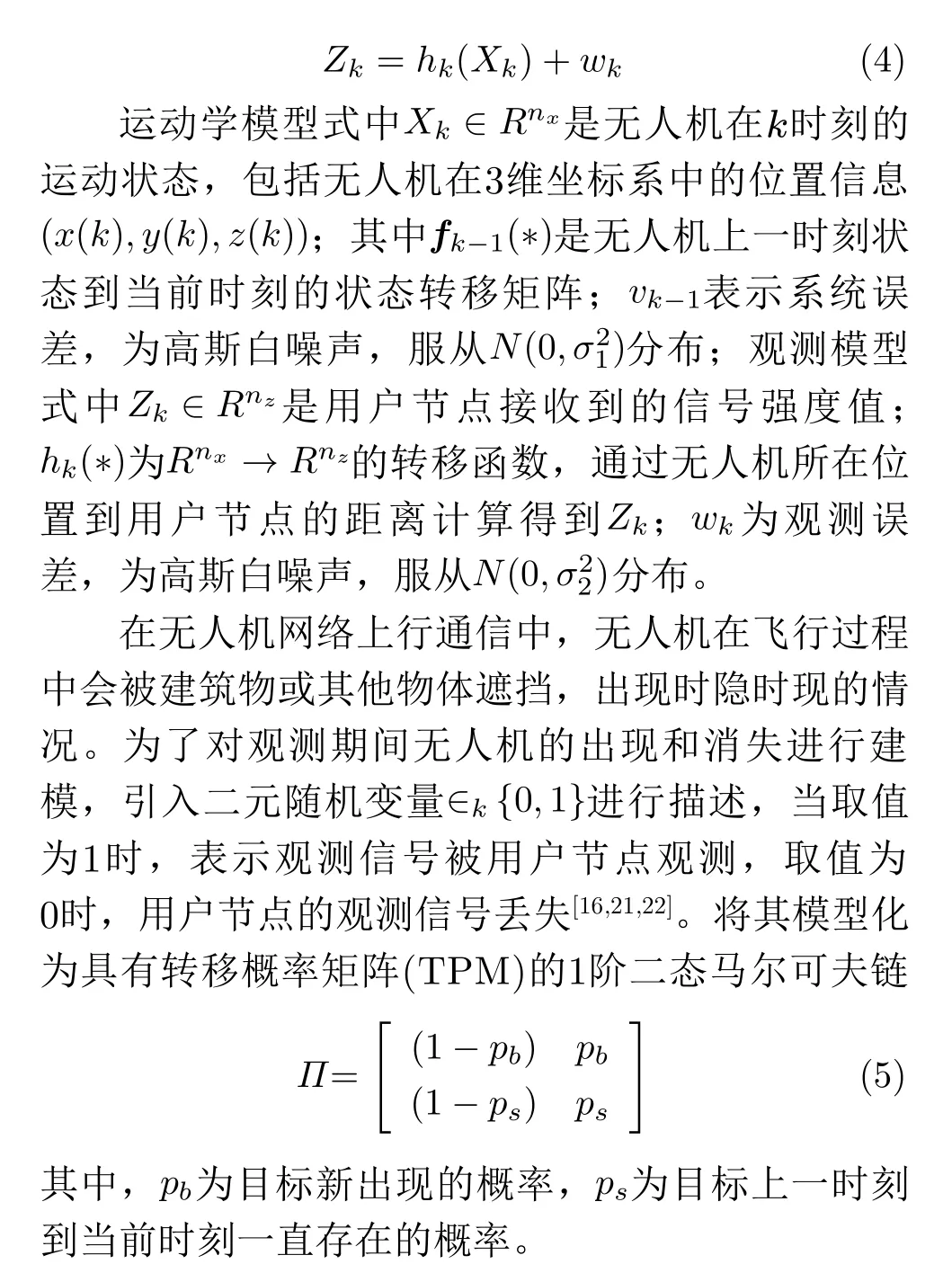
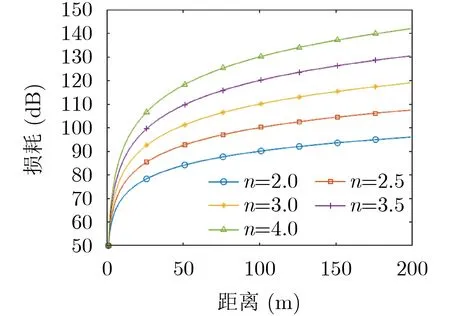
图2 路径损耗与n值的关系
3 基于分布式波束赋形上行传输算法
在无人机辅助通信网络中,由于无人机按照一定的飞行轨迹移动,与非无人机通信网络场景下相比,发射节点难以确定接收节点的方位;并且由于用户在无人机处相干相加的合成信号能量主瓣范围较窄,目标搜索能力更弱,以及无人机存在被遮挡发生的情况,所以,在无人机辅助网络中确定接收器位置是用户联合波束赋形发射的前提。因此,无人机辅助通信网络场景下,基于分布式波束赋形上行传输算法,首先需要确定无人机相对于每个用户的方向矢量,再向目标方位发射信号。运用基于RSSI的伯努利粒子滤波算法对无人机定位跟踪,确定无人机相对于用户的位置方向。由系统模型,用户根据接收无人机信号的RSSI值为实际观测状态,运用伯努利粒子滤波估计任意时刻的无人机位置。在确定无人机位置信息后,用户可得到无人机的具体方位角与俯仰角信息,从而确定目标方向,生成分布式波束赋形的权重矩阵,用户间合作运用波束赋形的发射方式完成信号上行传输。
3.1 基于RSSI的伯努利滤波无人机定位追踪
在用户对无人机进行定位时,考虑到无人机时隐时现被遮挡的情况,当前时刻k所出现的预测目标可能是k–1时不存在而k时新出现的目标;也可能是从k–1时存活到当前时刻k的目标。预测目标存在概率由上述两项相加组成

由上述伯努利滤波过程不断更新当前时刻k的目标生存概率qk|k、粒子权重以及粒子状态,并将其作为下一预测时刻的输入,以此循环完成无人机定位预测。预测定位部分展现了算法在对抗数据突变优越性,实现较为准确的定位。基于RSSI的伯努利粒子滤波算法可以有效完成系统用户对无人机的准确定位,由无人机所接收的用户相干信号主瓣较窄使得目标搜索能力下降的影响减小,并且能够解决无人机在遮挡情况下的准确定位,无人机时隐时现对用户定位影响大大降低。此后,地面用户节点根据无人机定位的位置向其方向发送信息,实现无人机通信网络的上行通信,改善单个用户在通信质量差的环境下发送信号的可接收性,恢复并提高上行通信速率。
3.2 基于分布式波束赋形技术的上行通信
首先,确定各个用户节点的位置与参考节点O到无人机位置的相对时延,k时无人机所在位置的方位角为θ0,俯仰角为φ0,需要让用户节点在此方向的远场形成最大增益。对于空间任意角度方位角为θ,俯仰角为φ的远场区域某一点,其到分布式阵列参考点O的距离为R0,到第M个阵元的距离为Rm,根据式(18)可得到距离产生的相对时延为τm,进一步用方位角θ与俯仰角φ表示为其中c为电磁波的传播速度,确定用户节点相对于参考节点O到无人机位置的相对时延τm后,计算出每个用户节点相对于参考节点O发送信号的相位差


由上述地面用户联合波束赋形发射信号方式,用户发射信号相关相加,使得无人机收到信号的信噪比提高,系统通信速率增大,恢复通信网路系统内用户的上行通信性能,完成上行传输。
4 实验设计与结果仿真
4.1 无人机定位追踪的实验仿真
本小节对所设计的一种基于联合波束赋形的无人机通信网络上行传输技术进行了实验验证。数值仿真参数如下:考虑地面用户节点数目为5个用户;无人机广播信号功率为–10dBm;路径损耗指数为2;用户节点发送信号的功率为50W,无人机运动轨迹为
仿真实验中,在对无人机进行目标定位,考虑了两种情况,一种情况是理想状况下,无人机未被遮挡,用户节点可以正常接收无人机广播信号,得到相应的Zk值,对无人机进行定位;另一种情况为无人机被遮挡的通信复杂情况,无人机所发送的无线信号受到强烈遮挡。在实验过程中,预测估计了30个时间点的无人机位置,并在10~15,6个时间节点内模拟通信过程中无人机信号被遮挡的复杂情况。
仿真实验中设置了5个用户节点联合对无人机进行定位,并与最小二乘定位算法(LeastSquares,LS)进行了对比实验[22],定位结果如图3所示。在无人机辅助通信网络中对无人机进行定位的场景下,本文的伯努利滤波算法受噪声干扰更小,并且在用户节点无法收到Zk时能够进行定位预测。而LS算法抗噪声干扰能力弱,在无Zk数据时,无法正常定位。LS算法实验过程中,在根据Zk计算用户节点到无人机的距离时,计算结果存在误差,会导致定位更不准确,所以,在实验中,给定了真实距离d进行了实验;地面用户节点所在高度区间为[0,3],节点高度差的变化较小,对无人机飞行高度的预测误差较大,导致预测无人机俯仰角误差较大。本文伯努利粒子滤波算法定位的方位角误差在0.05°之内,俯仰角误差在0.25°之内,并且无人机所在方向角度误差会随着噪声方差的大小而变化,如图4所示。
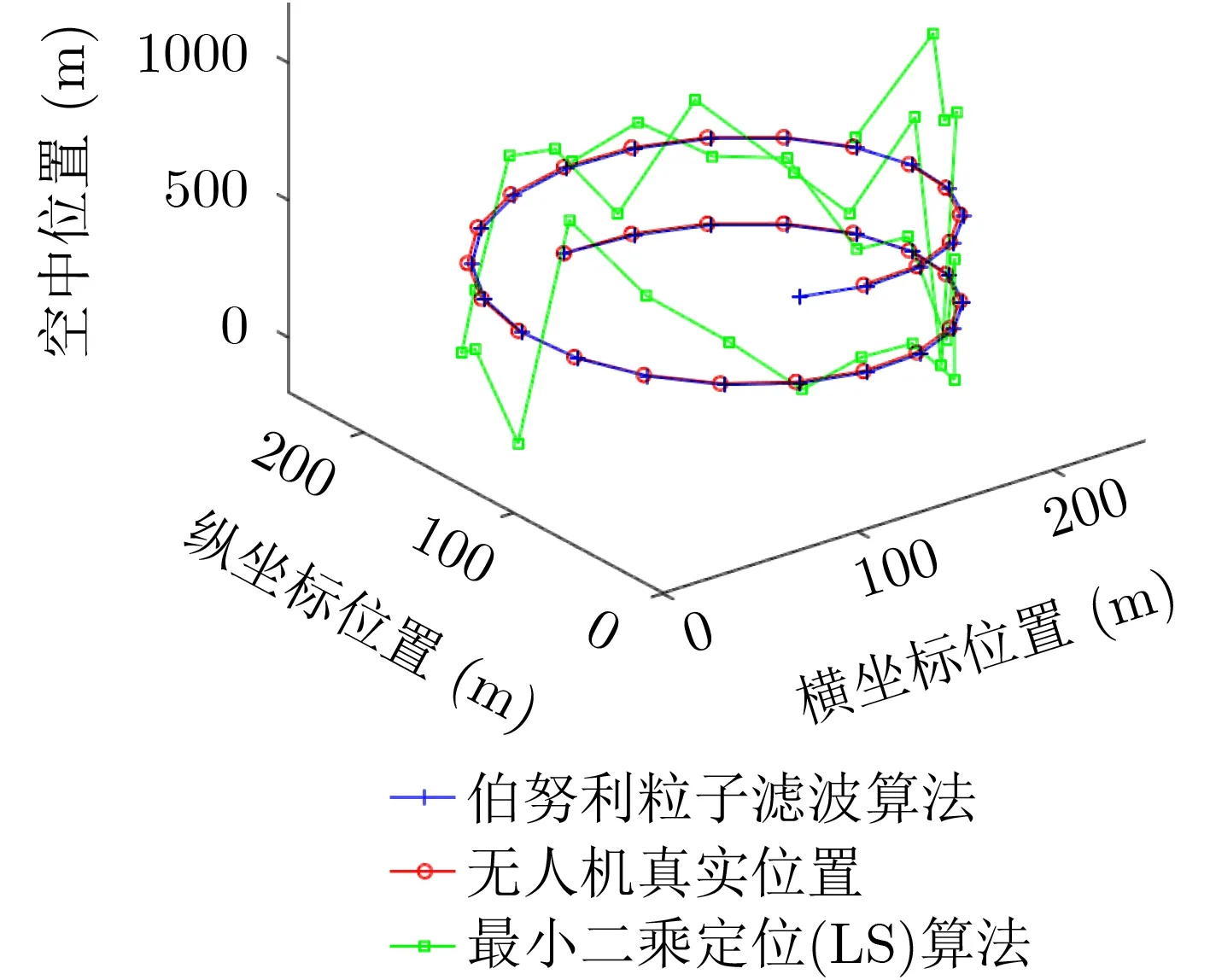
图3 无人机目标定位追踪图
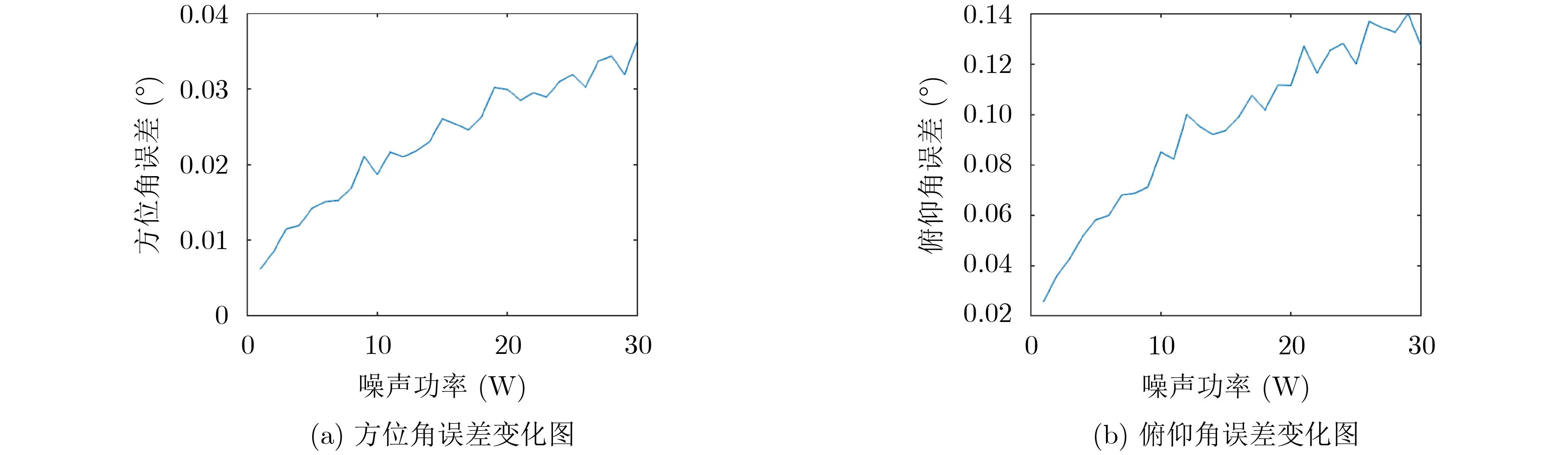
图4 观测噪声与目标方位误差的关系
在理想情况下,无人机未被遮,用户可以接收到无人机广播信号的平滑连续RSSI值,运用伯努利粒子滤波算法,系统所估计的RSSI值与真实RSSI值近似,如图5(a)所示;针对无人机被遮挡时隐时现的情况,实验中设置6个时间点内Zk值连续为0,对无人机进行定位,而基于RSSI的伯努利粒子滤波算法可以有效根据目标先验状态完成RSSI的预测,并不影响无人机的定位效果,如图5(b)所示。综上,通过伯努利粒子滤波算法对用户节点的Zk值进行了降噪与预测,即使在10~15时间点内的强遮挡环境下,仍然可以平滑补齐用户节点的Zk值,保障目标定位的准确性,如图5所示。由此可得,用户节点收到的Zk值波动较大,受噪声影响,通过伯努利粒子滤波后可以将Zk值进行平滑预测输出,对无人机进行准确定位。
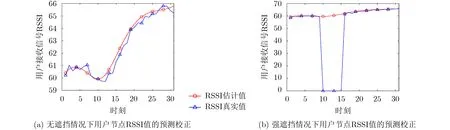
图5 用户节点RSSI值的预测校正
4.2 用户联合波束赋形上行通信的实验仿真
在系统完成无人机的定位后,系统用户采用联合分布式波束赋形方法对无人机进行上行传输。仿真实验过程中,设无人机网络覆盖用户数量M为30,无人机处于坐标系内参考节点方位角θ0为45°,俯仰角为φ0为45°的方向上,30个用户合作向无人机发送相干信号,信道带宽B为1Hz。由图6所示,针对无人机辅助网络中,用户运用联合波束赋形的发射方式,用户节点能够在空间中无人机方向处取得最大信号增益,在空间内相比于其他方位,无人机方向上形成了最大信号增益,收到用户节点所发射信号的最大增益,得到信号的最大信噪比以及通信最大信道容量。
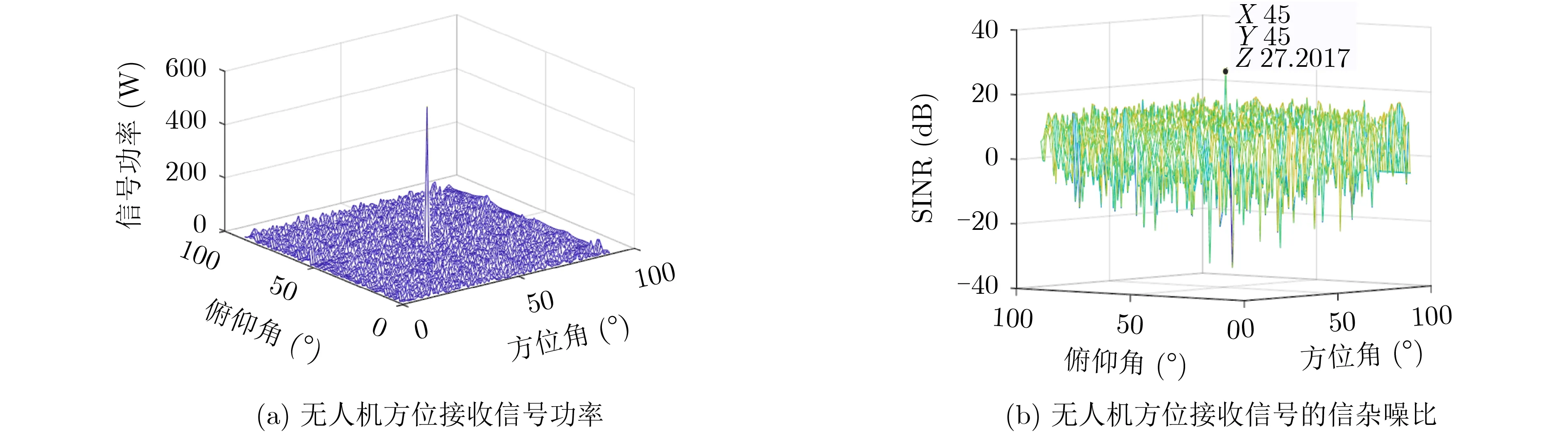
图6 无人机方向与其他空间方向信号增益对比图
进一步,本文研究了用户节点发射功率对通信速率、信噪比的影响,并与NOMA发射方式、全向发射方式进行了对比,如图7所示。随着用户节点发射功率的增大,通信速率与信噪比都会随着提升。在高斯信道下,本文的分布式波束赋形算法始终优于NOMA发射方式、全向发射方式;当发射功率增大到一定数值时,信道容量增速减慢,所以在用户节点发射功率应选取合适值。
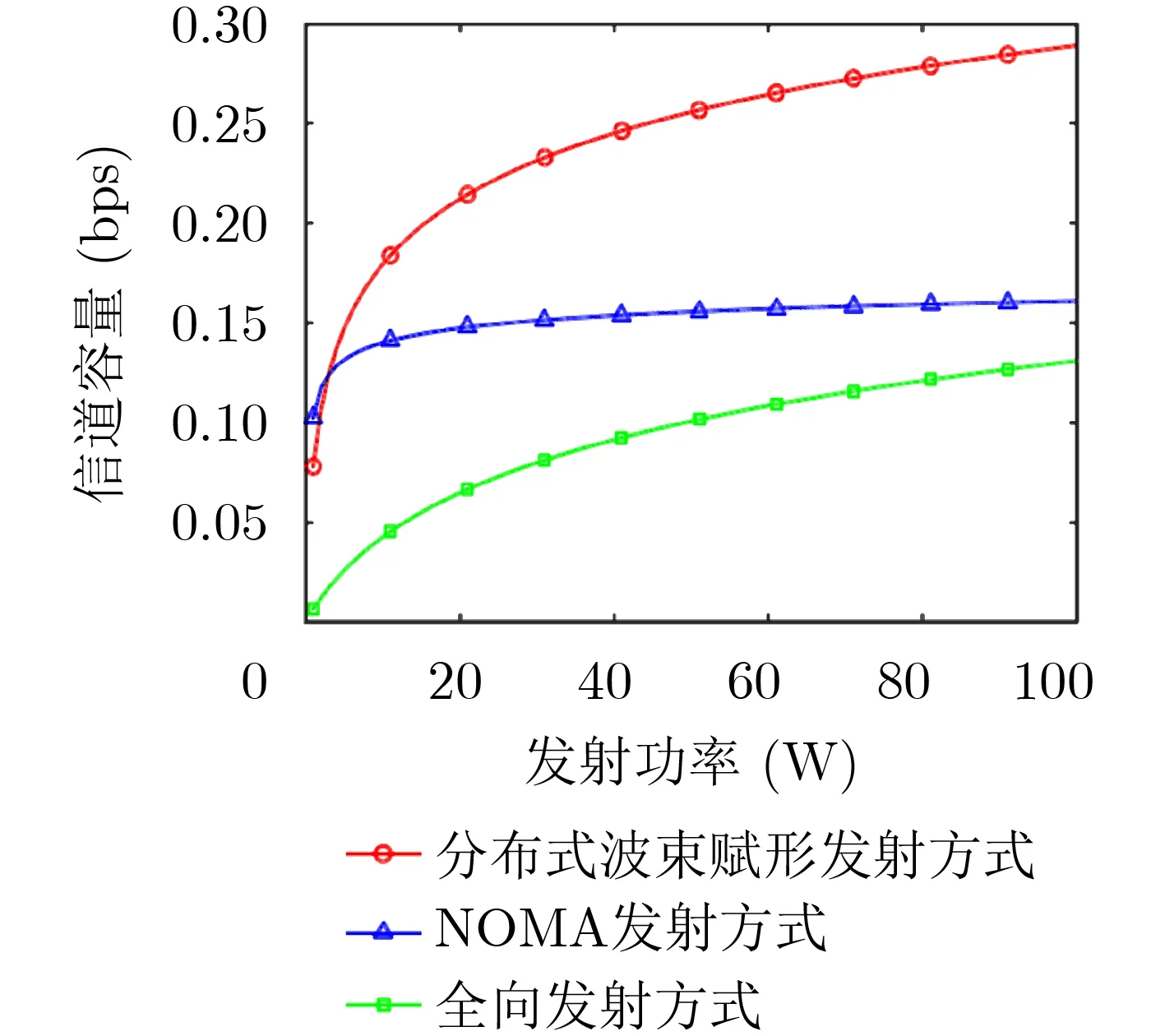
图7 信道容量随用户节点发射功率变化图
最后,在实验中研究了高斯信道下,本文的分布式波束赋形发射方式、NOMA发射方式以及全向发射方式随着用户节点数量变化信道容量的变化情况。从实验结果图8可以得出,本文的联合波束赋形一直优于NOMA发射方式以及全向发射方式,用户节点时分复用进行上行传输,随着用户节点数量的增加,无人机虽然收到信号的信噪比高,但信道容量下降,所以应合理考虑信道容量指标,并不能一直增大用户节点数量,这会得不偿失。并根据图8中具体实验数据,在表1进行了详细说明,本文发射方式在不同用户数量下,与NOMA发射方式以及与全向发射方式的信道容量对比,本文的发射方式相对于NOMA发射方式信道容量约提高了1.5倍,相对于全向发射信道容量提高了至少2倍。

图8 信道容量随用户节点数量变化图

表1 不同发射方式的信道容量(bps)随用户数量增加(倍)对比表
5 结束语
本文为了提高无人机辅助通信网络的上行传输通信性能,提出了一种基于联合波束赋形的无人机通信网络上行传输技术。本文算法能够保证无人机被遮挡情况下的准确定位;在此基础上,用户联合运用分布式波束赋形技术完成上行通信过程,提高了用户发射功率利用率、接收信号信噪比以及通信速率,保障了通信性能。通过实验表明,本文的联合波束赋形算法在无人机辅助通信网络中具备优秀的定位准确能力以及较高的通信速率,并且能够在各种复杂场景下保持上行通信性能。
猜你喜欢
通信技术(2019年3期)2019-05-31 03:19:08
电子测试(2018年6期)2018-05-09 07:31:54
能源(2017年10期)2017-12-20 05:54:07
能源(2017年5期)2017-07-06 09:25:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
无线电通信技术(2015年3期)2015-12-23 11:37:02
无线电通信技术(2015年3期)2015-12-23 11:37:00
雷达与对抗(2015年3期)2015-12-09 02:38:50
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
自动化博览(2014年12期)2014-02-28 22:34:27