
基于大数据聚类的机器人步态控制系统设计
2022-03-30 07:12申丽芳
计算机测量与控制 2022年3期
李 莹,申丽芳
(沈阳工学院 信息与控制学院, 辽宁 抚顺 113122)
0 引言
针对于定向性信息来说,大数据具有快速增长的变化能力,且其从属复杂度也会随网络环境的改变而产生变化。大数据可以看作是当数据规模扩大到一定程度后而产生的信息量质变行为,同时包含多种数据信息类型,不但涉及文字、图像等传统的结构化信息,也包含声音、视频等连续的新型非结构化信息,且与其他类型的数据参量相比,大数据在传输时间方面的应用要求更高[1-2]。从范围空间的角度来看,大数据信息以整个互联网空间作为提取背景,特别是针对运动学等应用问题来说,大数据参量所能提供的参考信息更多,不仅能够保障相关函数公式定义的运算有效性,也可实现对数据统计环境的较好完善[3]。
传统机器人步态控制系统已经应用于实际工作中,例如文献[4]提出逆运动学控制系统,在硬件方面采用TMS320VC5509A设备作为设计核心,结合测距传感器、压力传感器、惯性传感器等元件对步态数据的采集时序进行实时控制,再通过姿态解算的方式,确定运动过程中的角度与速度数值。然而此系统所标定的机器人行为位姿角度过大,易使其关节灵活性受到影响,从而使得机器人步行能力受到影响。文献[5]提出基于电容式触觉传感器的机器人步态控制系统,利用电容式触觉传感器采集测量参数,包括机器人运动峰值法向力的大小和时间,以及腿部旋转速度,当机器人穿越不同类型的地形时,传感器会测量接触力,基于步态性能研究,通过实时地形分类实现了基于地形的步态控制。该系统位姿标定较为准确,但机器人步态控制的运动灵活性水平较差。
针对此问题,引入大数据聚类思想,设计新型的机器人步态控制系统,利用舵机控制板、传感器电路等设备元件,规划机器人支撑腿、摆动腿的瞬时运动行为,再结合聚类算法的适应度函数条件,实现对关节角度的计算与求解。
1 机器人步态控制系统总体设计方案
机器人步态控制系统的总体设计应从传感器设备、主处理器元件、舵机控制板3个角度同时进行,具体操作方法如下。
1.1 传感器设备
为了完成对机器人行走步态位姿的实时修正与控制,需要不断获取机器人行为及其所处周围环境的具体信息,在此过程中,传感器设备起到了至关重要的调节作用,且只有在多级传感器元件的共同配合之下,才能实现对机器人步态信息的按需处理[6]。利用九轴传感器采集机器人步态位姿信息,结合压力元件了解足底与地面之间的接触情况,再通过大数据聚类算法将已获取的信息发送给下级舵机控制板设备。
1)九轴传感器:
MPU9250是九轴传感器的核心组成元件,如图1所示,由两部分应用结构共同组成。其中一组为单独的3轴磁力计,另一组为3轴加速度计与陀螺仪的连接组合。这种传感设备的物理体积较为小巧,拥有SPI、IIC两种最基本的数据通信方式。

图1 TMS320VC5509A的结构框图
传感器内部具有完整的16位ADC,对于数据型电量输出信号来说,元件结构为其匹配的可测参量范围相对较为广泛。机器人步态控制系统利用IIC总线读取MPU9250中的存储数据信息,主要引脚功能如表1所示。
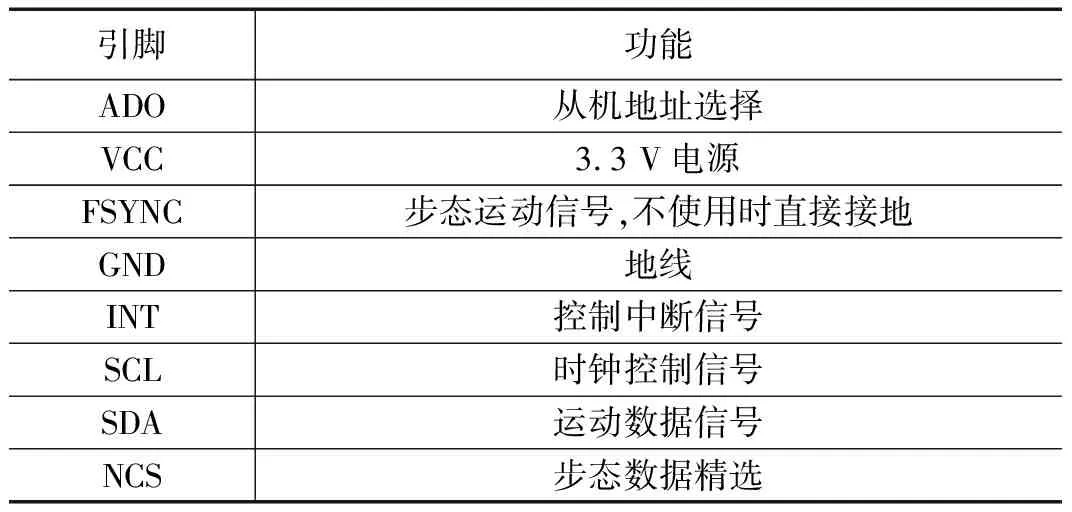
表1 MPU9250引脚功能
2)红外测距传感器:
红外测距传感器安装于机器人头部舵机中,可通过舵机的转动自测来判断机器人前方运动范围内是否具有障碍物[7]。传感器元件的应用遵循三角测量原理,根据障碍物所处位置的不同,所发出测距信号的返回接收位置也有所不同。
3)压力传感器:
压力传感器外附着一层电阻式薄膜,可用来判断机器人在运动过程中脚底是否与地面接触,具有重量级轻、体积小的应用优点。
1.2 主处理器元件
考虑到机器人步态控制系统的响应与集成要求,应选择TMS320VC5509A作为主处理器元件的核心应用芯片,如图1所示。TMS320VC5509A芯片可将信息转化为数字传输信号,并对其进行后续的传递与处理,具有相对高速的应用特点。External Memory Interface主操控结构可通过片选信号的方式,对隶属于芯片外部的存储空间进行选用,且由于GPIO、EHPI、Syspem、McBSP、RTC等多个接口的同时存在,控制系统主处理器元件可直接将舵机控制板由同步状态调制至异步状态,也可实现反向调制[8-9]。
从宏观性角度来看,主处理器元件的应用优点主要表现在如下几个方面。
1)集成性能良好:主处理器元件内集成了多组信号通讯模块,可在主电源支持下,实现由机器人步态控制数据到控制信号的转换。
2)运行速度较快:C55 DSP Core芯片可快速采集机器人步态行进指令,且大多数指令都可在同一信号处理周期内完成调整,因此主处理器元件可对机器人前进行为进行有效的中断控制。
3)稳定能力强、运算精度高:在主处理器元件中,TMS320VC5509A芯片通常都拥有独立的高精度并行乘法器设备与之配套,且所有与机器人步态行为相关的指令都是针对该模块专门设计的。
4)接口覆盖量大:为便于与下级控制设备建立稳定的连接关系,主处理器元件设置6-Chan DMA、INT、JTAG等多个接口组织,在机器人运行过程中,这些接口同时接受C55 DSP Core主芯片的调度,因此其应用能力始终保持高度的一致性。
1.3 舵机控制板
单纯的TMS320VC5509A芯片在机器人步态控制方面的应用能力较为薄弱,若将其直接与19路舵机关联起来,则会显得机器人的前进步态过于不稳定[10]。因此,在新型机器人步态控制系统中,将驱动舵机的任务分配给了应用级别更高的舵机控制板元件,当使用DSP指令发送模式时,舵机板可代替独立的19路舵机对信号传输行为进行控制,从而形成一种完整的“两级”连接结构,其电路原理图如图2所示。
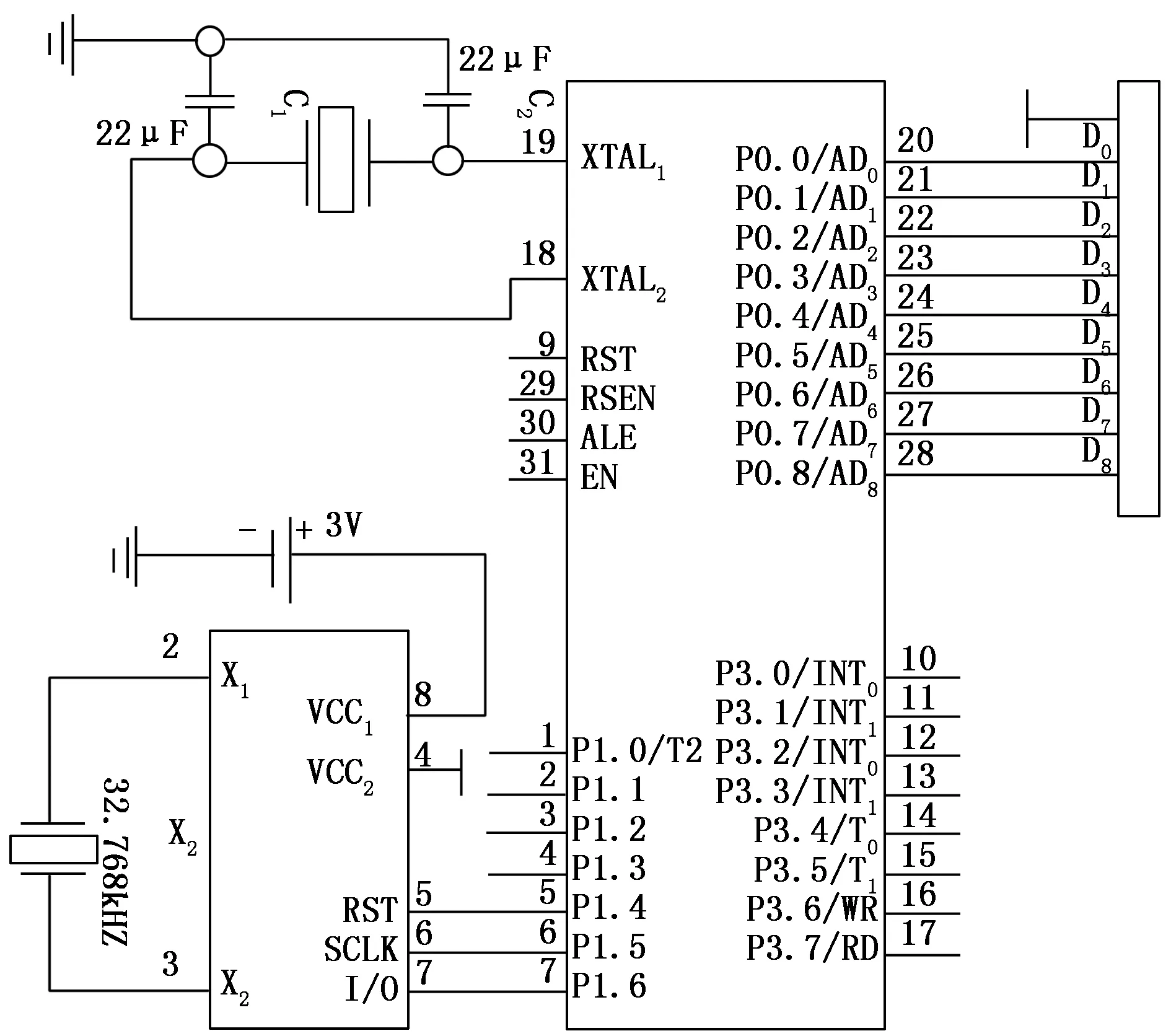
图2 SSC-32U型舵机控制板原理图
SSC-32U以ATmega328作为主控元件,在接收到上位机控制指令后,可以对下级舵机设备进行同步驱动,与TMS320VC5509A芯片相比,其负载能力更强,在作用过程中,不限制舵机设备的实际连接形式。由于ATmega328元件的存在,整个SSC-32U芯片外部的驱动电压始终保持为稳定数值[11]。针对于机器人步行运动来说,SSC-32U型舵机控制板输出的信号数据同时包含舵机角度、转动时间的物理信息。一般情况下,各个关节的运动与停止能够保持高度统一的状态,但若仅改变一个关节的运动角度数值,通过操作舵机控制板也是可以直接实现的。
2 基于大数据聚类的步态节点安排
按照机器人步态控制系统设计方案,通过定义关键节点的方式,建立关键的适应度函数条件,完成基于大数据聚类的机器人步态节点安排。
2.1 大数据聚类关键节点定义
在互联网环境中,关键聚类节点有两种表现形式,一种是通过破坏原节点,推断网络受到的影响,一般来说影响能力越大,代表该节点越重要;另一种是通过分析节点密度等特性来反映网络的重要性能力,并通过扩大原节点显著性等级的方式,来判断该节点是否为关键聚类节点。在机器人步态控制系统中,网络大数据聚类需要消耗大量的处理时间,因此可作为定义关键节点的重要物理指标[12-13]。为实现对机器人步态行为的最大化调度,默认所有关键节点都处在互联网中部,且为使定义时间长度得到有效控制,应将大数据聚类看作一种简单的数据信息堆叠行为,且随着待处理数据量的增大,聚类堆叠的处理层数值也会不断增大。设emin代表最小的信息聚类系数,emax代表最大的信息聚类系数,在机器人行进步数为n的条件下,可将关键大数据聚类节点表达式定义为:
(1)
其中:α1表示第一个行进步态指标,αn表示第n个行进步态指标,f表示聚类节点筛查条件,ΔT表示聚类节点的单位筛查时长。
2.2 适应度函数
适应度函数对大数据聚类算法起到了极强约束作用,可根据关键节点定义条件,规划步态节点在后续运动过程中所处的分布位置,从而为机器人选取一条相对可靠的行进路线。受到舵机控制板元件的影响,适应度函数作用能力应呈现范围式存在状态,即在固定运动区域环境中,由于适应度函数的存在,机器人前进步态不会与预设情况出现较大偏差[14-15]。设L代表固定运动区域的面积数值,h代表机器人前进长度,d代表机器人支撑腿与摆动腿之间的物理宽度值,联立公式(1),可将大数据聚类算法的适应度函数条件定义为:
(2)

3 机器人行进步态规划
3.1 支撑腿运动规划

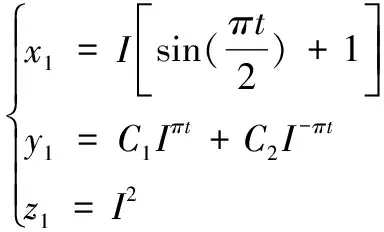
(3)
其中:x1表示机器人步态行为在X轴上的分量,y1表示机器人步态行为在Y轴上的分量,z1表示机器人步态行为在Z轴上的分量,C1、C2表示两个不同的步态行进系数。
3.2 摆动腿运动规划

(4)
3.3 关节角度求解
在步态行进坐标系内,由机器人自身结构特点及先前所规划的腿部步态行为可知,θ1、θ5为侧向关键的旋转角数值,只能在X-Z的平面环境中变化,θ2、θ3、θ4则为前向关键旋转角数值,如图3所示。
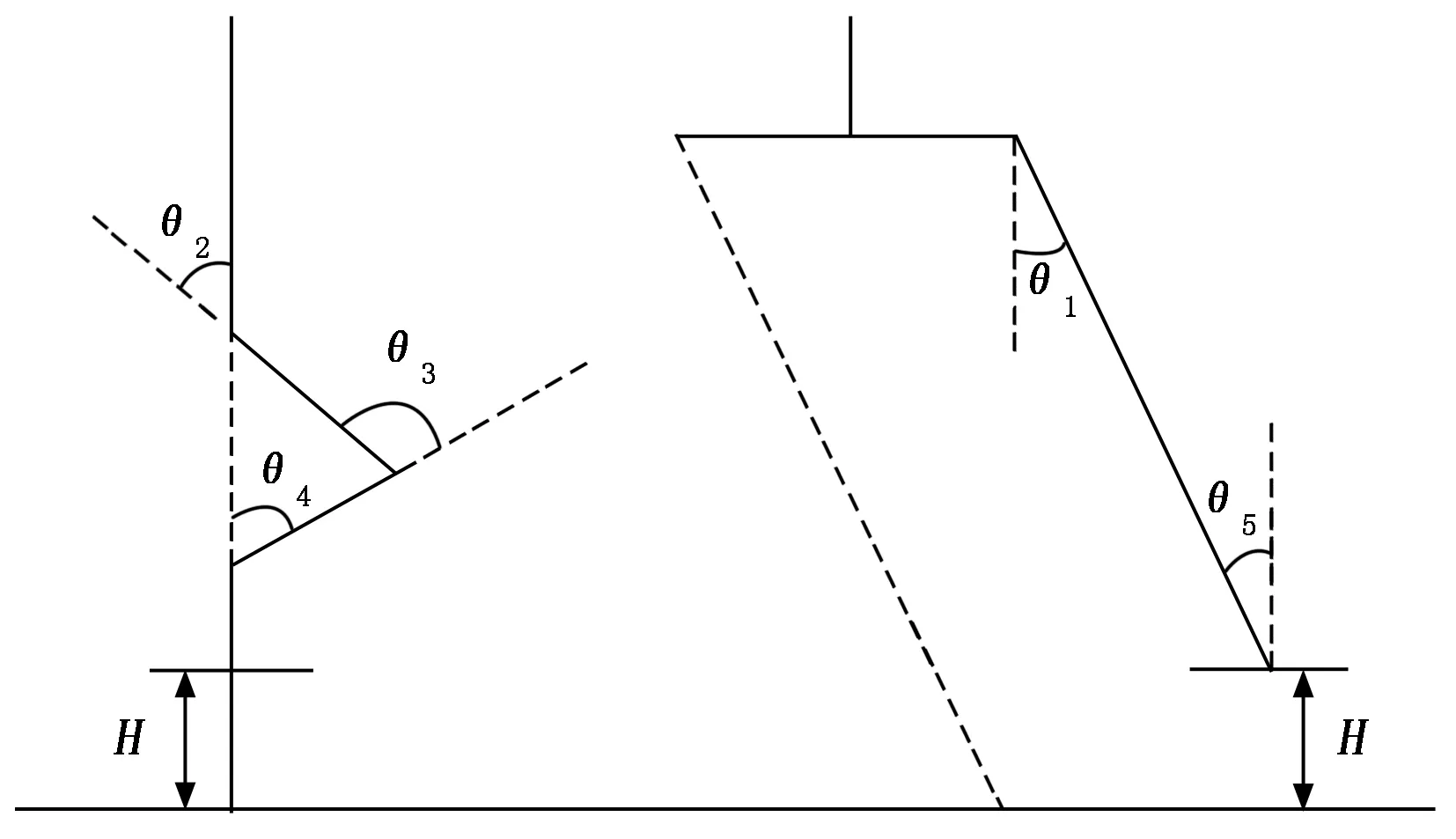
图3 机器人腿部各关节变化角度的定义
联合公式(3)、公式(4),根据行进速度v=(xi,yi,zi)和几何关系,写出各关节角度变化的方程如下:
(5)
对机器人支撑腿有θ2>0、θ3<0、θ4>0,对机器人摆动腿有θ1>0、θ5<0。至此,完成对机器人行进步态的规划与处理,在大数据聚类算法的支持下,实现机器人步态控制系统的顺利应用。
4 实例分析
分别采用文献[4]系统、所设计系统对机器人基本位姿进行标定,机器人步行参数如表2所示。

表2 机器人步行参数
将机器人放在平整的地面上,让其按照所规划路径做步行前进运动,并参照表2来设置机器人的最大抬脚高度、质心高度、步长与周期,然后让机器人连续步行前进10米,期间机器人的步态行为稳定且平滑,没有出现明显的晃动状态,此期间所捕捉到的机器人平地运动截图如图4所示。

图4 机器人平地步行运动截图
为更准确检验机器人在平地的步行状态,读取两种系统控制下机器人的关节弯曲次数,并将其与理想数值对比,如图5、图6所示。

图5 所设计系统、文献[4]系统关节弯曲次数
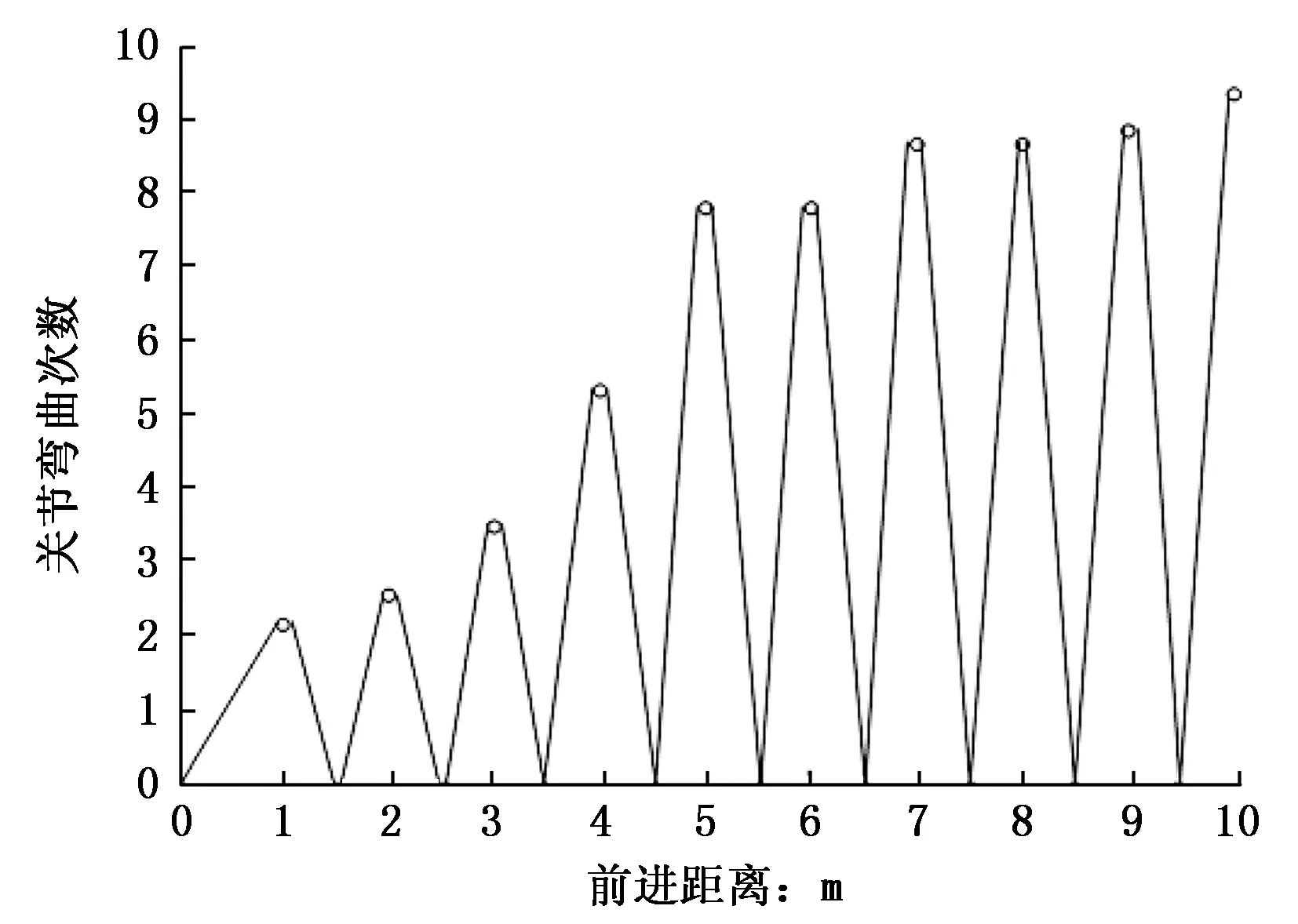
图6 关节弯曲次数理想数值
对比图5、图6可知,在行进过程中,机器人步态每变化一次,其关节弯曲量都会由0直接变化至当前的最大值结果,因此在两次前进行为之间,关节弯曲次数都会呈现短暂的“归零”状态。所设计系统数值曲线与理想数值曲线相比,并没有过于明显的出入,在前2米的前进距离中,所设计系统关节弯曲次数量小幅高于理想数值,当前进距离为6 m和8 m时,理想数值出现了两次较小的下降状态,但所设计系统关节弯曲次数值在整个实验过程中,始终保持不断上升的变化状态,只是实验后期上升幅度相对小于实验前期。文献[4]系统数值曲线与理想数值曲线相比,在既定节点处的数值水平明显更低,当前进距离为7 m和9 m时,文献[4]系统关节弯曲次数值出现了两次较小幅度的下降状态,实际变化趋势也与理想数值不完全一致。
将机器人放在不平整的地面上,让其按照所规划路径做步行前进运动,结合传感器反馈回来的姿态信息确定机器人关节弯曲角度的实际变化情况。参照表2来设置机器人的最大抬脚高度、质心高度、步长与周期,然后让机器人连续步行前进10米,在此期间及时调整机器人步态行为使其保持稳定且平滑的状态,具体所捕捉到的机器人运动截图如图7所示。

图7 机器人不平整地面步行运动截图
读取所设计系统、文献[4]系统机器人的关节弯曲角度数值,并将其与理想数值对比,如表3所示。

表3 关节弯曲关节弯曲角度对比结果
在机器人行进过程中,关节角度的弯曲数值越小,代表机器人的运动灵活性越强,且当其弯曲度超过110°时,机器人的前进步态会出现明显的迟缓状态。以前进距离等于5 m作为分界点,分析表3可知,所设计系统关节弯曲角度与理想数值在分界节点之前,均保持不断上升的数值变化趋势,但所设计系统数值的上升幅度明显小于理想数值,平均值水平也相对更低;文献[4]系统关节弯曲角度在分界节点之前的变化行为并没有明显规律,且其均值水平也远高于理想数值与所设计系统数值。在分界节点之后,理想弯曲角度均值出现了明显提升,与所设计系统数值相比其上升幅度更为明显,但也并未超过最大弯曲数值110°;文献[4]系统关节弯曲角度的上升幅度比理想数值更为明显,且其均值水平也超过了110°,对机器人的稳定步行前进起到了一定的抑制作用。
综上可知,大数据聚类型控制系统在稳定机器人前行步态方面具有较强的促进作用,在前进等长距离的情况下,机器人关节的弯曲次数值大而弯曲角数值小,充分说明了在前进过程中,机器人关节确实具备较强的运动灵活性。
5 结束语
为了更好适应大数据聚类算法的应用需求,机器人步态控制系统针对提高机器人关节运动灵活性的问题展开了研究,联合传感器设备、舵机控制板等应用元件,规划支撑腿、摆动腿的实际运动行为,再借助适应度函数,求解关键的关节角度数值。实验方面从位姿标定的角度着手,分析关节弯曲次数与弯曲角度的具体变化情况,与传统逆运动学控制系统相比,大数据聚类系统对于机器人关节运动灵活性的促进作用更强,可对其稳定步行运动能力提供强有力的保障。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
包装工程(2022年10期)2022-05-27
科技信息·中旬刊(2018年9期)2018-10-21
科学之谜(2018年4期)2018-09-17
教育教学论坛(2017年34期)2017-08-30
中国科技纵横(2017年13期)2017-08-09
航空模型(2016年5期)2016-07-25
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
中国信息技术教育(2014年5期)2014-03-17
