
分布式地基雷达深空探测技术
2022-03-29 13:02丁泽刚张光伟张天意董泽华
雷达科学与技术 2022年1期
丁泽刚, 曾 涛, 张光伟, 向 寅, 刘 怡, 张天意, 董泽华, 龙 腾
(1. 北京理工大学信息与电子学院雷达技术研究所, 北京100081;2. 嵌入式实时信息处理技术北京市重点实验室, 北京100081;3. 北京理工大学重庆创新中心, 重庆401135)
0 引言
地基深空探测雷达是利用地面大口径天线发射电磁波并接收深空目标回波的雷达系统,可以获得天体的轨道、形貌、材质等信息,是开展深空探测的有效手段。自20世纪60年代以来,地基雷达越来越广泛地应用到深空探测中,其中最著名的是美国的干草堆(Haystack)雷达、阿雷西博(Arecibo)雷达和金石太阳系雷达(Goldstone Solar System Radar,GSSR)。
20世纪六七十年代,美国林肯实验室利用干草堆雷达对月球、金星、水星等天体进行了观测,得到了它们的散射图像,然而由于受到功率、孔径的限制,干草堆雷达对月球成像的分辨率仅为2 km,后来随着阿雷西博雷达和金石太阳系雷达投入使用,干草堆雷达逐渐转入对近地空间目标的探测和成像。阿雷西博雷达和金石太阳系雷达是世界上最著名的深空地基雷达,两者开展了绝大部分的深空探测任务。1963年,美国国家自然基金会建成了当时世界上最大口径的地基雷达—Arecibo雷达,其口径达305 m,发射功率达250 kW,此后经过不断升级改造,S频段发射功率增加至1 MW,数十年来,阿雷西博雷达一直是地球上观测能力最强的地基雷达系统,然而2020年Arecibo雷达发生坍塌事件,从此退出了历史舞台。1958年,美国国家航天局建立了金石太阳系雷达系统,它是美国深空探测网的重要组成部分,其发射天线口径为70 m,发射功率为500 kW,它是目前世界上在役的探测性能最高的深空地基雷达。综上所述,国外地基雷达深空探测已经实现了对月球、小行星以及太阳系其他行星的高分辨观测结果,并在此基础上取得了丰硕的科学成果。
然而,干草堆雷达、阿雷西博雷达和金石太阳系雷达均属于传统地基雷达,存在百米天线口径和MW发射功率的限制,无法满足当前对深空探测的更高需求,因此需要研究新的雷达体制。分布式雷达作为一种可扩展的新体制雷达,为地基雷达向着更高功率孔径积的方向发展提供了可靠途径。1958年,林肯实验室的Morrow提出了自聚焦处理天线,这种天线可以消除目标距离相位的影响,将多个天线的信号进行相参叠加。1963年,美国研发了分布式孔径系统,通过自适应相位处理实现了等效口径天线的性能。2003年,林肯实验室正式提出分布式全相参的概念,提出部雷达的信号进行相参处理后最高可以获得倍信噪比增益的结论。在2004年8月和2005年7月,林肯实验室开展了由2部单元雷达组成的分布式雷达系统对静态金属水塔、动态飞机、火箭目标的探测试验,获得了收发全相参9 dB(2)的信噪比增益,从而验证了分布式全相参理论的正确性。当前,国外地基雷达正在向着分布式新体制的方向转变,美国正在积极推进分布式新体制雷达的研究工作。我国在分布式相参雷达领域也取得了诸多成果,北京理工大学、北京无线电测量所、电子科技大学等单位已经开展了相关的研究工作。文献[8]介绍了分布式相参雷达的工作原理、技术优势、关键技术等,并探讨了未来的发展方向。文献[9]在分布式雷达相参参数估计、相参性能分析等方面进行了深入的研究,为分布式雷达的实现提供了支撑。文献[10]分析了构建我国近地小行星探测雷达系统的途径,提出通过天线组阵技术将多个深空测控地面站组成一个天线阵系统,从而进一步提升探测能力,为分布式雷达的设计提供了有益参考。
目前我国的地基雷达不具备对深空目标的高分辨观测能力,地基深空探测主要以光学和射电为主要手段,而在雷达方面则发展较为缓慢。至今地基雷达深空探测主要集中在空间目标探测上,在天体探测方面,我国地基雷达深空探测处于起步阶段,不具备对近地小行星、月球、类地行星等天体的高分辨观测能力。近年来,我国在深空探测领域正处于蓬勃发展的新时期,已成功实现了月球“绕、落、回”三步走探测计划,并计划走向更远的深空,然而如果仅依靠发射航天器进行就位探测,探测周期相对较长,且可探测的天体较少,无法满足我国深空探测高速发展的迫切需要。分布式雷达技术为我国建设高分辨的地基雷达深空探测系统提供了可靠途径,通过多部雷达的高精度协同,可以突破单部雷达天线口径和功率的限制,极大提升观测能力,从而有力推进我国在地基雷达深空探测领域的发展。
本文将介绍分布式相参雷达的基本原理,探讨其性能优势、关键技术,并分析地基雷达深空探测和成像技术,最后对全文进行总结。
1 分布式相参雷达
1.1 基本原理
分布式相参雷达是指由多部单元雷达和中心控制处理系统组成的一种新体制雷达,如图1所示。多部雷达通过中心处理系统的控制进行收发全相参工作,等效形成一部虚拟的大口径、高功率雷达,通过增加雷达单元数量,可以进一步实现口径的空域扩展和能量合成,实现更远距离的探测。

图1 分布式地基雷达示意图
分布式相参合成雷达包括接收相参和发射接收全相参两种工作模式,如图2所示。接收相参模式下,部雷达同时发射正交波形,每部雷达可接收路回波信号,部雷达共计接收路信号,然后通过处理获取各路回波信号的时延、相位等相参参数。在发射接收全相参阶段,部雷达发射相同的波形,根据相参参数对各路发射信号进行补偿以实现发射相参,然后对各路回波再次进行补偿以实现接收相参。文献[11]对于两种模式的信噪比增益进行了具体的推导,发射相参模式可实现倍信噪比增益,发射接收全相参模式可实现倍的信噪比增益。

(a) 接收相参原理示意图
1.2 性能优势
1) 作用距离更远。分布式相参雷达拓展了深空探测的边界,雷达的作用距离与单元雷达数、单元雷达平均发射功率、发射系统增益、接收系统增益、接收机等效噪声温度、波长、相参积累时间等参数相关,具体如下所示:
(1)
由式(1)可知,分布式雷达的作用距离和单部雷达相比可提升34倍,图3给出了作用距离提升倍数随雷达单元数的变化曲线。
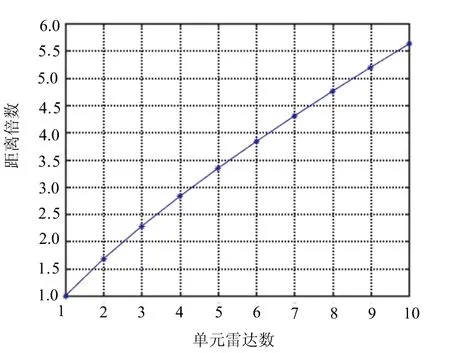
图3 单元雷达数与距离倍数的关系图
2) 角度分辨率更高。雷达的波束宽度和天线口径成反比关系,多部雷达协同工作等效合成一部大口径雷达,波束宽度更窄。图4给出了单部雷达和两部雷达相参合成后的波束方向图,其中天线口径为20 m,天线间隔为30 m,可见,分布式雷达的波束宽度更窄,角度分辨率更高。

图4 分布式雷达与单元雷达的天线方向图
3) 可扩展性更高。传统雷达无法灵活地改变天线的尺寸和功率,存在性能上限,而分布式雷达具有更高的灵活性,只需要简单增加单元雷达的数量,就能进一步提升雷达性能,拓宽观测的边界。
1.3 关键技术
分布式地基雷达需要观测的深空目标包括卫星、月球、小行星、行星及其卫星等,它们距离地球极远。考虑到雷达回波的信噪比与目标距离的4次方成反比关系,极远的观测距离导致雷达信号在传播过程中能量衰减极为严重,雷达接收信号的信噪比极低,为了有效提升探测雷达的作用距离,需要在雷达体制和信号处理方法两方面进行分析。多部雷达的信号在空间上进行相参合成可以极大提升信噪比,同时要求各个单元之间保持相参性;长时间信号的相参合成会进一步提升信噪比,同时要求雷达发射信号自身需要保持严格相参。
为了解决上述问题,需要研究长时分布式全相参雷达体制。在空间尺度上,需要研究分布式同步组网技术,实现对数公里内的雷达阵列的同步相参组网,使得天线阵列收发期间保持时间、频率、相位同步,从而保证回波信号和原始信号的相参性,该技术的关键在于确定收发链路各个环节存在的相位误差并进行精确补偿。在时间尺度上,需要研究新型的超稳频率源技术,以保证雷达发射信号自身长时间保持相参性。高精度的同步网络和高稳定的信号源将分散部署的雷达天线和数千秒时间上的信号统一到相同的信号基准上,从而极大地提升了相参积累性能,探测到更加遥远的目标。
2 低信噪比下的探测与成像技术
2.1 基于广义瑞登傅里叶变换的探测技术
为了满足天体目标的超远观测距离对雷达探测威力的更高要求,同时提升天体运动参数测量精度,需要对分布式雷达相参合成后的回波进行长时间积累,进一步提升信噪比。由于长时间尺度下天体、空间目标的运动变化会导致散射点跨距离单元、跨多普勒单元的情况,传统检测算法无法克服,需要研究长时间积累技术。
在分布式雷达体制下,基于广义瑞登傅里叶变换(GRFT)的长时间积累技术为解决超远天体目标探测中遇到的低信噪比问题、严重的跨单元现象提供了新的解决思路。GRFT将目标回波的积累问题转化为参数化的模型匹配问题,如图5所示,通过多维度参数化建模和包络相位联合补偿,将目标回波能量聚焦到变换的参数空间中,形成多维参数空间中聚焦的尖峰,然后根据尖峰的大小判断是否检测到目标。

图5 GRFT原理图
广义瑞登傅里叶变换的表达式为
()=(,,…,)=


(2)
式中,为光速,为快时间,为慢时间,(,)为回波空间,为波长,为运动参数空间[,,…,],目标的斜距历程可以表示为

(3)
GRFT本质上是在参数空间内搜寻最优的解,相对于常规的检测方法来说,GRFT可以精确获取天体的运动参数和散射信息,克服了跨单元现象,可以通过长时间积累提高回波的信噪比增益,实现极低信噪比下的目标检测。
2.2 基于参数化运动补偿的成像技术
在雷达天体探测系统中,目标与雷达之间的运动可以分为相对平动与相对转动,如图6所示,其中,相对转动是提供方位向分辨能力的基础,而相对平动则会导致包络弯曲与冗余的相位调制,若不进行补偿将严重影响成像结果。由于天体目标的回波信噪比极低,传统的非参数化补偿方法失效,需要采用基于参数化运动补偿的成像算法。

图6 天体目标成像模型
参数化运动补偿算法首先将目标的运动建模为多项式模型,然后以图像评估指标(图像熵、对比度等)作为代价函数,通过参数搜索精确估计运动参数并进行补偿,最后进行方位向成像,成像过程表示如下:
(,)=((((,))·

(4)

总之,基于参数化运动补偿的二维成像技术利用了回波信号的二维积累增益,可以解决雷达对超远距离天体成像的低信噪比问题,满足深空观测需求。
3 算法仿真
3.1 试验系统
为了开展地基雷达深空探测的研究,课题组正在重庆积极推进地基天文雷达缩比验证系统的建设,如图7所示,该系统采用分布式体制,由4部16 m孔径雷达和1个控制中心组成。系统采用收发全相参方式工作,等效合成一部32 m孔径雷达,在外部输入的目标星历引导下,对目标或目标的局部进行稳定跟踪,持续获取目标回波,处理得到目标的轨道、形貌等测量信息,雷达系统参数如表1所示。

图7 地基雷达缩比系统工作示意图

表1 雷达系统参数
3.2 仿真分析
为了验证低信噪比下的成像技术,本节开展了地基雷达对月球和小行星的延迟多普勒成像仿真,成像分辨率约为200 m。
仿真选择的成像场景选择月球南半球的巴科坑(东经16°~22°,南纬49°~53°),其高程模型如图8(a)所示,场景高程起伏约5 km。巴科坑延迟多普勒成像仿真结果如图8(b)所示,对比结果显示仿真成像结果和巴科坑场景是一致的。

(a) 高程模型
近地小行星成像的仿真模型选择216 Kleo-patra,该小行星模型呈现骨头型,自转周期约5.38 h,如图9(a)所示。多角度延迟多普勒成像仿真结果如图9(b)、(c)、(d)所示,可以看出,不同观测角度下小行星成像存在明显差异,因此地基雷达多角度观测是小行星形状模型反演及确定自转状态的重要途径。

(a) 216 Kleopatra 模型
总之,本节通过开展地基雷达对月球及小行星的成像仿真,验证了低信噪比下基于参数化运动补偿的成像技术的有效性,为分布式地基雷达深空探测提供了技术支撑。
4 结束语
本文对分布式地基雷达深空探测技术中的关键问题进行了分析。针对天体回波信噪比极低的情况,本文采用长时分布式全相参雷达体制,通过多部精确同步的雷达协同工作,等效形成大口径、高功率雷达,实现空间尺度的相参积累。在时间尺度上,本文采用长时间积累算法,即基于GRFT的探测技术和基于参数化运动补偿的成像技术,从而实现时间尺度上的积累,并通过仿真验证了所提算法的有效性。分布式地基雷达作为一种新体制雷达,将满足深空探测对于极大功率孔径积的需求,实现更远距离和更高分辨的深空目标探测,看到更加遥远的天体。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
科学与财富(2021年35期)2021-05-10
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
百科探秘·航空航天(2019年4期)2019-06-11
科学24小时(2019年4期)2019-06-10
科技视界(2016年11期)2016-05-23
新高考·高一物理(2016年3期)2016-05-18
现代电子技术(2015年17期)2015-09-23
物理(2009年3期)2009-05-21
