PID自整定控制系统设计
2022-03-29 06:14:21陈金宝
科技风 2022年9期


摘 要:本文主要内容是PID自整定控制系统设计,运用PID自整定技术对电动机转速进行实时调节,在短时间内达到新的平衡点。这样可以有效地解决控制困难和控制精度不高等难题,能够提高控制质量和系统稳定性。
关键词:PID自整定;实时调节
1 绪论
1.1 课题研究的背景及意义
电动机的发展在工业生产方面最能展现其优越性,在节省大量的劳动力的同时,又可以很大程度地提升生产力,是现代生活中不可缺少的替代品。对电动机的精准控制不仅能优化产品质量,还能体现现代化生产的优势。目前我国的电动机虽然种类繁多,但都没有得到很好运用和发展,在很多情况下都是大材小用,因此需要我们研究和推广高效电动机。采用PID自整定控制的电动机可以解决资源浪费现象,真正实现现代生产理念。在现代生产生活中,用PID控制的电动机成为最受欢迎的控制器,它快速的整定效果已达到高精度控制,但电动机面临的巨大难题是其参数难以控制,阻碍了其发展。
传统的PID算法参数的调节时间非常长,即使有经验的工程师也得需要很长的控制时间,难以满足在生产中的需要,浪费人力物力。有些整定方法有相对较好的控制效果,但必须要经过很长的控制时间,而整定时间短的则达不到理想的控制效果,所以在以后的发展方向上主要是在提高控制效果,缩短控制时间。到现在为止,越来越多的PID整定方法被开发出来,以满足不同的需求,根据环境的不同,选择合适的整定方法至关重要。如何选用较为简单快捷的算法,在生产生活中具有重要意义。
1.2 PID自整定的国内外发展现状
1922年米罗斯基提出PID的概念,根据位置控制系统,总结出了控制规律公式。20世纪30年代,由于技术原因并未得到推广。10年之后,自动调节器才被研发出来,当时人们的认知水平和购买能力有限而没有被推广。1942年以后,PID控制器在参数的调整方面取得了很大的进步,各式各样的控制方法被人们所推广,出现了诸如最优PID控制、预估PID控制、自适应PID控制等高级PID控制策略。由于PID控制器使用方便,结构简单,才使其快速发展,被越来越多的人使用。
目前电动机的发展比较迅速,对电动机的控制方面有很大空间的提升。在国内,PID控制器的研究还处于刚刚起步的状态,其控制器实际运用还是比较少的,同时研发和销售PID控制器的商家也比较少,国外的PID参数整定技术的研究起步比较早,相对国内来说技术已经比较成熟。自PID控制理论的提出到现在已有100多年的历史,PID控制器也得到了飞速发展,目前市场上的PID控制器种类繁多,价格也随着控制效果的不同大有差异。
传统PID控制器主要是根据偏差来控制参数,如果输入值突变,则很容易产生超调,损坏PID调节器。另外PID参数必须是在动态特性下完成的,如果在控制过程中负载突然变化,这是必须重新整定。
1.3 电动机的PID自整定的控制特点
电动机的PID自整定也包括开环和闭环控制,开环控制系统一般指在控制电路中瞬间完成,不需要对其结果分析。而闭环控制系统可以将结果反馈与设定值做对比,并根据其偏差的大小调整整个系统的稳定,进而实现自动整定的效果。
用PID自整定控制的电动机在创新上有以下特点:
(1)通过改进后的电动机控制具有转速设置和显示功能,这种设计方法可以不用有人在现场调控就可以正常运转,实现远程操控。还具有远距离传输控制,手动修改参数的功能,较以前的功能比较有了很大程度的提升。
(2)过去控制器的参数比较简单,控制效果也不能满足所需要的要求,参数优化的改进方法远远跟不上现实的需要。改进后的PID参数自整定控制,具有参数实时调整功能,调节的效果要比过去的控制好得多。
2 电动机数学模型及PID自整定算法
2.1 电动机的调速方法
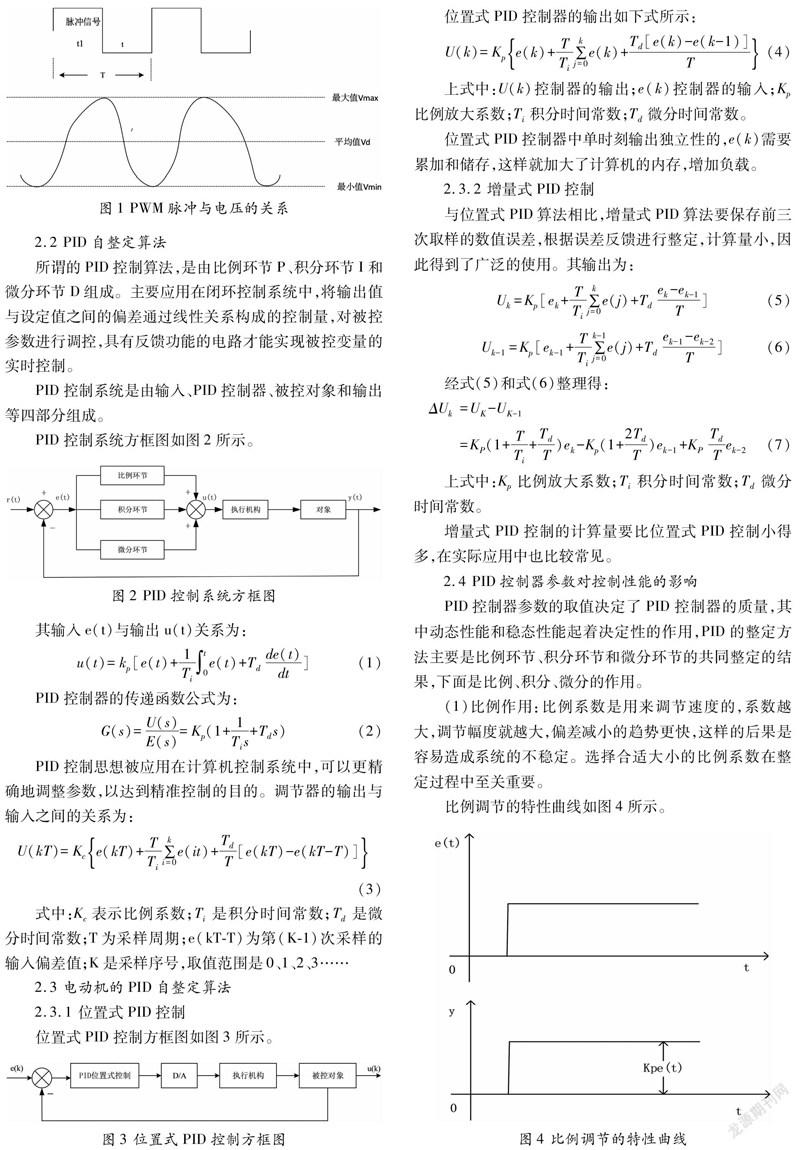
电动机的调速方法是利用PID控制输出PWM高电平的输出时间,通过调节占空比改变电压实现对电动机转速的控制。
电动机的速度VD=VMAX×D,其中D为占空比,VMAX是电动机的最大转速,所以,根据上式中改变D的大小就可以实现电动机的转速调节。
PWM脉冲与电压的关系如图1所示。
2.2 PID自整定算法
所谓的PID控制算法,是由比例环节P、积分环节I和微分环节D组成。主要应用在闭环控制系统中,将输出值与设定值之间的偏差通过线性关系构成的控制量,对被控参数进行调控,具有反馈功能的电路才能实现被控变量的实时控制。
PID控制系统是由输入、PID控制器、被控对象和输出等四部分组成。
PID控制系统方框图如图2所示。
其输入e(t)与输出u(t)关系为:
PID控制器的传递函数公式为:
PID控制思想被应用在计算机控制系统中,可以更精确地调整参数,以达到精准控制的目的。调节器的输出与输入之间的关系为:
式中:Kc表示比例系数;Ti是积分时间常数;Td是微分时间常数;T为采样周期;e(kT-T)为第(K-1)次采样的输入偏差值;K是采样序号,取值范围是0、1、2、3……
2.3 电动机的PID自整定算法
2.3.1 位置式PID控制
位置式PID控制方框图如图3所示。
位置式PID控制器的输出如下式所示:
上式中:U(k)控制器的输出;e(k)控制器的输入;Kp比例放大系数;Ti积分时间常数;Td微分时间常数。
位置式PID控制器中單时刻输出独立性的,e(k)需要累加和储存,这样就加大了计算机的内存,增加负载。
2.3.2 增量式PID控制
与位置式PID算法相比,增量式PID算法要保存前三次取样的数值误差,根据误差反馈进行整定,计算量小,因此得到了广泛的使用。其输出为:
经式(5)和式(6)整理得:
上式中:Kp比例放大系数;Ti积分时间常数;Td微分时间常数。
增量式PID控制的计算量要比位置式PID控制小得多,在实际应用中也比较常见。
2.4 PID控制器参数对控制性能的影响
PID控制器参数的取值决定了PID控制器的质量,其中动态性能和稳态性能起着决定性的作用,PID的整定方法主要是比例环节、积分环节和微分环节的共同整定的结果,下面是比例、积分、微分的作用。
(1)比例作用:比例系数是用来调节速度的,系数越大,调节幅度就越大,偏差减小的趋势更快,这样的后果是容易造成系统的不稳定。选择合适大小的比例系数在整定过程中至关重要。
比例调节的特性曲线如图4所示。
(2)积分作用:主要是用来消除系统稳态误差,只要有稳态误差的存在,积分作用就必须运行,直至系统中稳态误差为零。由于很难消除系统的稳态误差,所以积分作用会影响控制效果,使系统稳定性下降。
积分调节的特性曲线如图5所示。
(3)微分作用:微分主要抑制偏差的产生,当设定好输入值时,微分作用开始工作,将输出值的大小整定到输入值,这就将偏差的大小降低,微分作用還有超前的抑制作用,它能提前预知偏差的走势,在偏差还没生成之前就抑制其产生,可以提高系统稳定性,不会造成参数突变带来的影响。但是微分作用也有其弱点,它也能放大噪声干扰,如果微分作用很强的话,就容易将系统中的噪声放大,降低系统抗干扰能力。
比例积分微分调节特性曲线如图6所示。
2.5 本章小结
本章主要针对位置式PID控制算法与增量量式PID算法在算法公式上做比较,控制原理上没有什么区别,但在整定过程中增量式PID算法有以下优点:
(1)位置式PID算法输出需要联系整个过去的状态,在计算过程中要用到过去误差的累加值,就会有增量误差产生,影响控制精度。增量式PID要保留前三次取样的差值,经过计算机的处理之后,才能达到较好的控制效果。
(2)位置式PID算法从手动切换到自动时,要将计算机的输出值置为原始阀门开度,才能保证系统的稳定和无冲击切换。增量式PID算法与位置式PID算法不同,其输出与原始值无关,在手动切换到自动时,不会影响系统的稳定性。
经过位置式PID与增量式PID算法的对比,可以看出,增量式PID算法比位置式PID算法更有优势,所以本文在参数整定方面选用增量式PID参数整定方法。
3 总结与展望
本课题主要研究的是运用PID参数整定的方法,就现在发展现状而言,PID发展的方向是在参数整定方面,合理地运用比例、积分、微分调节,寻找其中间点,实现参数的快速整定和提高系统稳定性。
近几年来,科学技术在不断更新,如今的控制方式也由人工控制到微机控制的转变。PID调节在未来的工业生产中应用会越来越广泛,例如,棒材轧制生产线中活套高度的PID控制,活套高度作为控制目标,采集现场实际活套高度进行比较后,进行PID调节,调节器输出值叠加到运行的实际转速上,自动调节上游机架级联给定速度,以提高轧制生产的稳定性。
参考文献:
[1]吕文琪.自动门智能控制算法及其可靠性研究[D].南京:南京航空航天大学,2015:13-14.
[2]杨帆.具有pid自整定功能的温度控制器研究与实现[D].大连:大连理工大学,2006:7-9.
[3]郭唐仕,尹华杰.Buck变换器的数字模糊PID控制[J].电源技术应用,2002,(1):23-25.
作者简介:陈金宝(1994— ),男,汉族,宁夏吴忠人,本科,研究方向:连轧棒材调速控制系统。
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:12:22
数学物理学报(2021年2期)2021-06-09 08:54:26
数学物理学报(2019年5期)2019-11-29 07:46:34
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
重型机械(2019年3期)2019-08-27 00:58:52
广东技术师范大学学报(2016年5期)2016-08-22 09:07:22
电信科学(2016年9期)2016-06-15 20:27:25
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19 06:55:30
电子设计工程(2015年16期)2015-02-27 12:07:58
物探化探计算技术(2014年1期)2014-06-27 01:32:50