基于语义多尺度的矿山地下空间建模方法
2022-03-28 11:51李雯静张馨心林志勇邱莉邱立强
工矿自动化 2022年3期
李雯静,张馨心,林志勇,邱莉,邱立强
(1.武汉科技大学 资源与环境工程学院,湖北 武汉 430081;2.冶金矿产资源高效利用与造块湖北省重点实验室,湖北 武汉 430081;3.武汉大学 遥感信息工程学院,湖北 武汉 430079)
0 引言
近年来,随着对虚拟矿山技术的研究逐步深入,矿山三维建模成为研究热点[1-3]。目前,矿山企业对矿山地下空间模型的应用需求不断增加,针对地下空间的认知活动目标呈现多层次性[4]。然而,地下矿山全景三维空间模型构建会造成冗余,模型构建需要综合考虑经济性、非冗余性与建模效率。
多细节层次(Level of Details,LOD)模型[5-6]是一种多尺度模型,可反映从全局到局部不同尺度的模型信息,表达模型与现实世界对应实体之间的紧密程度。近年来,LOD 模型被广泛应用于城市建模中[7-10],城市地理标记语言(CityGML2.0)定义了三维城市环境中重要的实体类型(如建筑物、植被、水体、隧道等)及其几何、语义、拓扑和外观等属性。与城市建模不同,矿山地下空间有其特有的属性信息及内部结构,井巷及其内部的生产系统是与采矿活动联系最密切的空间要素[11-12],建模的目标对象通常位于巷道及其构筑物内部。因此,学者们提出了语义多尺度思想[13-15],将语义作为表述实体要素抽象程度的重要指标,通过实体要素本身蕴含的语义描述其属性特征,使得该实体能够更加合理地表达矿山领域的逻辑结构。然而,基于语义的地下矿山实体建模方法存在以下缺陷:①细节层次划分的详细程度不够,缺少矿山语义类划分。② 模型根据不同需求配置的自由度较小。③缺乏井下三维模型的多尺度精细化表达。
随着三维建模逐渐往精细化方向发展,部分学者提出矿山参数化建模[16-17]方法。参数化建模是指对目标模型进行参数化处理,在建模和优化阶段不断调整参数,最后生成最优解。通过参数化建模方法能够精确地完成复杂形体的设计,具有简单、快速,实现成本低等优点[18-19]。因此,本文将参数化建模和语义多尺度思想应用到矿山LOD 模型构建中,提出基于语义多尺度的矿山地下空间建模方法。将语义属性作为划分多尺度的重要因素,依据特定的标准构建矿山语义尺度离散LOD 模型,从语义的角度定义矿山地下空间不同应用所需实体要素的细节丰富度和视觉属性,为地下空间认知活动提供合理、科学、高效的多尺度三维空间模型。
1 基于语义多尺度的矿山地下空间建模方法
传统的LOD 模型构建方法一般预先规定每一等级的LOD 模型的精度范围和详细程度,对不同应用场景的语义划分模糊,模型配置自由度较小。在矿山领域,进行巷道掘进、开采等生产活动时,需要用不同层次的模型来指导生产。同时,矿山企业不同职能部门对三维模型的要求也存在差异,如矿山综合管理部门多从宏观角度关注整个矿山的模型结构,机电工程部门多关注矿山供电系统等基础设施模型构建,生产技术部门则更关注矿山生产设备等精细化模型构建。因此,需要合理改进LOD 模型,以满足矿山企业特定场景的应用需求。
基于语义多尺度的矿山地下空间建模方法步骤:①确定矿山地下空间建模对象。② 依据语义的重要程度,根据不同语义划分每类元素的层级,限制矿山地下空间建模对象的明确边界。③定义除语义属性外的LOD 模型构建指标。④ 定义离散LOD 模型和连续LOD 模型之间的关系,以保证多尺度模型在视觉上的连续性。
1.1 矿山地下空间建模对象选取
矿山地下空间是由处于地下岩层和矿体内的巷道与硐室所构成的空间,井下所有生产系统的设备和作业人员都分布在该空间内[11,20]。巷道是各种人工设施的重要载体,贯穿于整个矿山体系,巷道模型则是数字化矿山的重要组成部分。因此,本文将建模对象确定为矿山地下空间内的实体要素,并依据实体要素位置划分为巷道模型和巷道内模型,如图1所示。巷道模型包括巷道主体模型及其他人工构筑物模型,主要描述巷道主体结构、形状、走向及井下变电所、硐室、绞车房等构筑物;巷道内模型包括矿山设施模型和设备模型。

图1 矿山地下空间实体要素Fig.1 Mine underground space entity elements
1.2 建模对象语义划分
语义是矿山LOD 模型的主要构建指标,不同的语义尺度表达了矿山地下空间实体要素的主次关系。相较于空间尺度,语义尺度能够呈现模型的内部结构、分布特征和层次关系,提供直观的视觉信息,并揭示模型元素与整体之间的关系。
矿山地下空间内部实体要素类型繁复,根据实体要素的语义信息定义不同的语义类,如巷道类、硐室类、轨道类等。语义类向下划分成族,以巷道类为例,划分为开拓巷道族、回采巷道族等。按照功能将族再分解为组件元素,便于建模时采用参数化思想来控制形状固定、可重复使用的元素。矿山语义类定义如图2 所示。
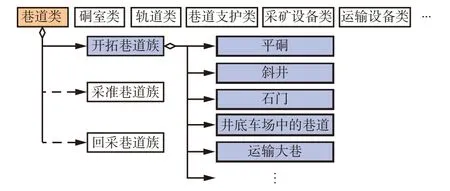
图2 矿山语义类定义Fig.2 Mine semantic class definition
基于矿山地下空间实体要素语义的层次关系及重要性,从整体到局部构建矿山LOD 模型。根据语义类所在位置将LOD 模型分为巷道和巷道内2 个层次,每个层次由严格定义的语义类表达,每个语义类所展示的粒度大小在该层语义尺度内,由几何属性、外观属性等其他LOD 模型构建指标决定。
1.3 其他LOD 模型构建指标
LOD 模型构建指标是划分LOD 的标准,定义了模型与现实的对应关系,一般又称为分辨率或详细程度[21-22]。除语义外,矿山LOD 模型的构建指标还包括几何属性、外观属性及特征属性。将按照语义划分的LOD 模型称为SLOD(Semantic LOD)模型,在每层SLOD 内,按照多种属性组合的方式划分为多个ALOD(Attributes LOD)模型。
几何属性概括了建模对象主题类的几何详细程度。不同层次的LOD 模型几何复杂度不同。外观属性包括颜色和纹理,可以提高模型的辨识度。颜色可用于区分不同的主题类,纹理可增强模型的现实感。特征属性是指建模对象的内部特征,如设计参数、建造年份、维修信息、所有权等。为适应参数化建模要求,将模型设计参数添加到特征属性中。每个主题类及组件都有1 个或多个属性。
1.4 LOD 模型的连续性
为了保证语义细节层次视觉上的连续性,在离散化的语义LOD 模型设计过程中应当考虑模型的连续性。LOD 模型的视觉连续性表现在以下方面:①对于离散语义细节层次,每层表达的信息连续且层层递进,从大范围主体信息到局部区域细微信息,展示矿山地下空间。② 在语义细节层次框架下,离散属性细节层次从粗略到详细、由简要到细致地表达矿山语义类模型的表面形态。单个组件可出现在不同层次的模型中,通过拓扑关系连接整体与组件(相关拓扑关系在本文中不予讨论)。
2 矿山LOD 模型设计及实现
2.1 SLOD 模型设计
设计SLOD 模型时考虑以下几点:①矿山地下空间建模对象的语义类应明确指定。② 不同细节层次的语义类可共存于1 个场景中。③允许用户使用组装和定制功能,通过设置应用场景所需的语义类,灵活配置各层次的建模对象。
将SLOD 模型划分为巷道模型(SLOD0-SLOD2)和巷道内模型(SLOD3-SLOD5)。
(1)SLOD0(巷道网络模型):包含巷道断面和走向形状,由截面线和巷道中心线构成。一般LOD 模型使用较低维度的图元来表达主题要素,而本文从SLOD0 开始就采用三维状态下的线模型,其后均使用三维几何模型。这一点支持了参数化建模的实现,不会因为出现多维元素而影响模型主题类的表达。
(2)SLOD1(巷道粗略模型):巷道骨架整体模型,包含如下主题类:①开拓巷道,包括运输大巷、轨道大巷、回风大巷。② 采准巷道,包括采区集中巷、采区石门、井底车场。③其他主题,如井筒、联络巷等。
(3)SLOD2(巷道精细模型):巷道骨架精细化模型,增加了巷道构筑物细节模型,包含如下主题类:①回采巷道,包括工作面运输巷、排瓦斯巷。②采区(矿块)内岩层。③硐室,包括翻笼硐室、装载硐室、马头门、井下变电所、绞车房。④巷道交叉点。
(4)SLOD3(巷道内主要设施模型):依附于巷道而存在的构筑物模型,包含巷道支护、道床、轨道、水沟、人行道等主题类。
(5)SLOD4(巷道内主要设备模型):与生产相关的主要设备模型,包含如下主题类:①采矿设备,包括采矿机、动力中心、液压支架、运输车、支架搬运牵引车。②主要运输设备,包括带式输送机、筛分破碎机。③主要提升设备。④中央变电所设备,包括矿用隔爆变压器、配电装置、综保装置等。⑤中央水泵房设备,如水泵等。⑥掘进设备,如掘进机等。
(6)SLOD5(巷道内其他设备模型):巷道内其他相关设备和系统模型,包含排水系统、通风系统、监控系统、供电系统等。
2.2 属性组合
建模对象可包含多个主题类,高级别LOD 模型可包含低级别LOD 模型。设 ALODx(x=a,b,c)为几何、外观、特征属性的集合,ALODa表示无显著外观信息的粗略几何模型,ALODb表示添加了不同实体颜色的较精细几何模型,ALODc表示进行纹理渲染后的精细几何模型,则SLODn(n=0~5)与 ALODx可组合为 SLODnx:

SLODn模型可表示为

SLODn模型的属性可表示为

式中:S为语义属性;T为几何属性;F为特征属性;A为外观属性。
以巷道支护类为例,SLOD3 与ALODx组合生成SLOD3x的过程如图3 所示。
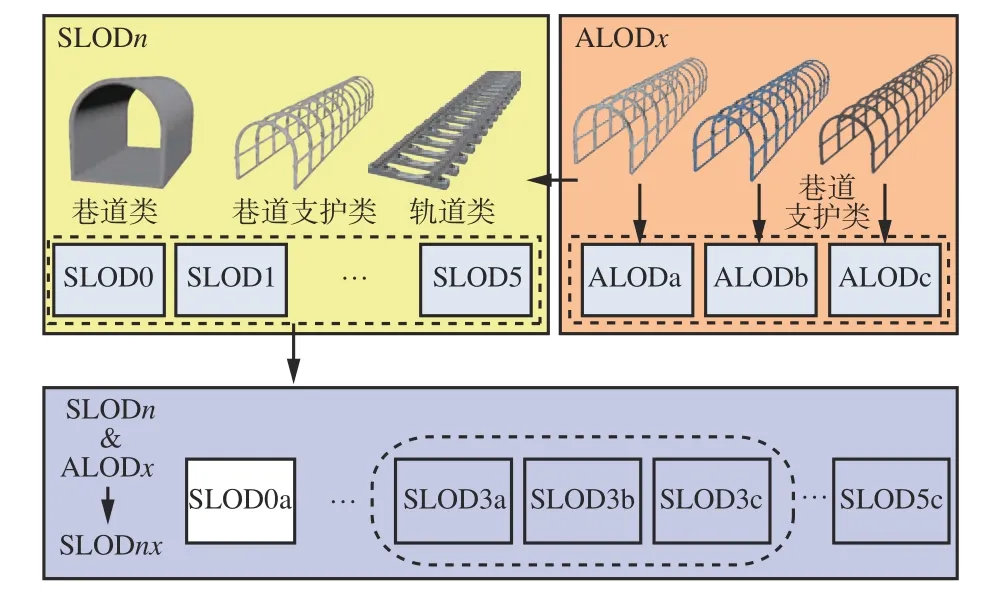
图3 SLOD 与ALOD 的组合Fig.3 Combination of SLOD and ALOD
将SLOD 与各种属性进行组合,可清晰显示矿山语义类模型的详细程度和主次关系。然而,并不是所有的组合都是有效组合。本文中巷道和巷道内SLOD 和ALOD 的所有可能组合见表1,其中,“×”表示无效组合。由于SLOD0 表示巷道截面线和中心线所构成的模型,不涉及几何及外观形态的变化,所以SLOD0b,SLOD0c 为无效组合。

表1 巷道和巷道内SLOD 和ALOD 组合Table 1 Combination of SLOD and ALOD of roadway and in-roadway
2.3 SLOD 参数化建模场景实现
采用Revit 构建矿山语义类参数化族库,并载入3DMax 中进行细节添加和纹理渲染,构建矿山地下空间SLOD 可视化场景。以井底车场为例,巷道模型SLOD0-SLOD2 的可视化场景如图4 所示。SLOD0为巷道的走向线和截面线模型,SLOD1 为整体巷道网络三维骨架结构模型,SLOD2 为在整体巷道网络上叠加构筑物细节(水泵房、变电站、马头门、机车修理库等)后的模型。
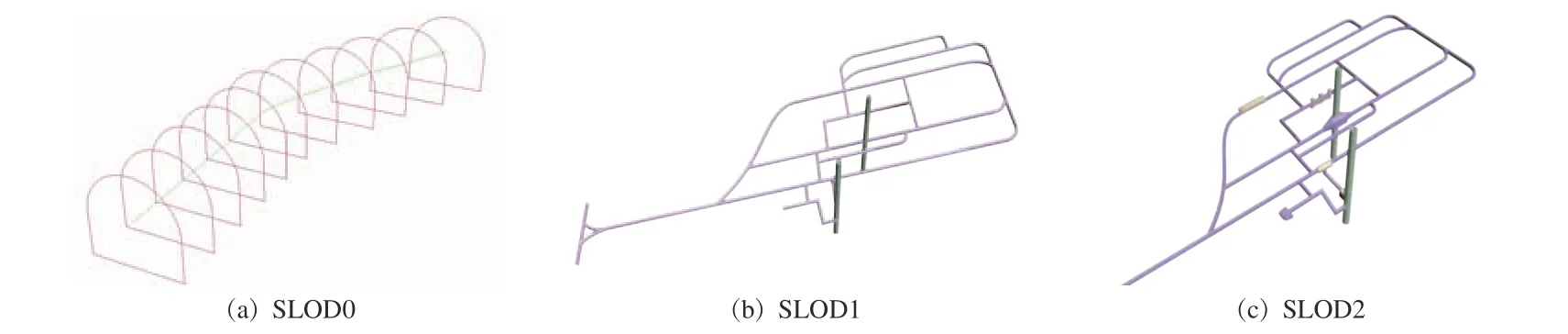
图4 SLOD0-SLOD2 的可视化场景Fig.4 Visualization scene of SLOD0-SLOD2
巷道内模型SLOD3-SLOD5 的可视化场景如图5 所示。SLOD3 为巷道内主要设施模型,包括巷道支护、铁轨等;SLOD4 为矿山生产相关设备的粗略模型,包括矿车等;SLOD5 为巷道内部其他精细设备模型,包括巷道灯、管线等。
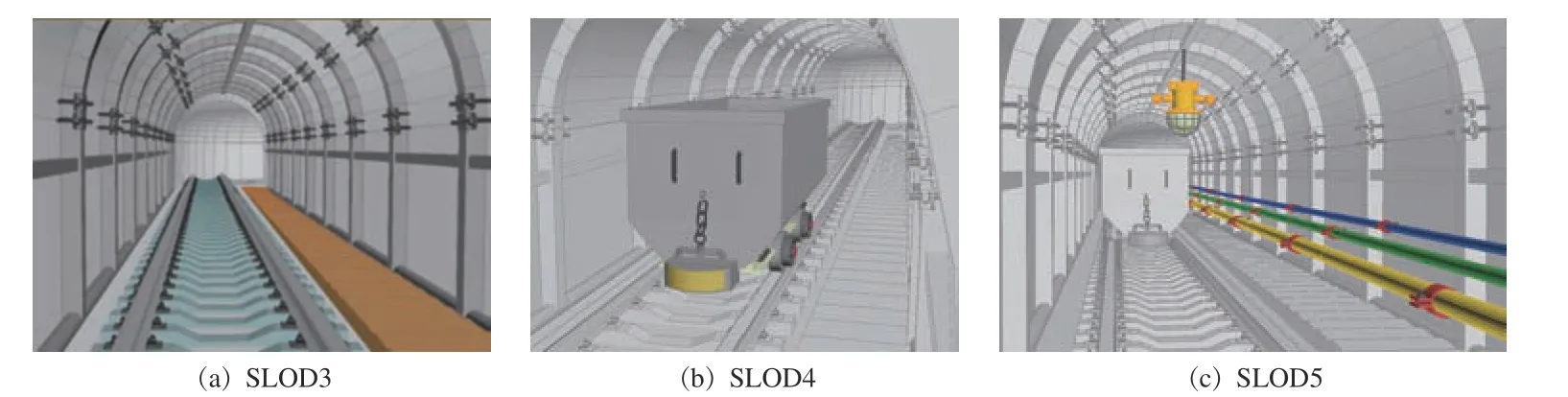
图5 SLOD3-SLOD5 的可视化场景Fig.5 Visualization scene of SLOD3-SLOD5
2.4 SLOD/ALOD 组合建模场景实现
以SLOD3 为例,与ALOD 组合建模场景如图6所示。图6(a)为粗略几何模型,图6(b)为增加了外观信息的较精细几何模型,图6(c)为增加了纹理渲染的精细几何模型。SLOD/ALOD 组合形式提供了语义类模型多属性的表达方式,有助于表达更多的语义信息,提高模型构建的精细程度,并允许几何属性以不同细节层次的形式展现。
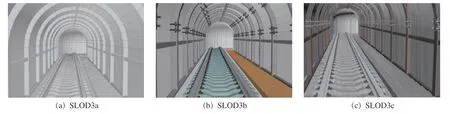
图6 SLOD3 与ALOD 组合建模场景Fig.6 SLOD3 and ALOD combined modeling scene
3 结语
提出了基于语义多尺度的矿山地下空间建模方法,将语义尺度作为最重要的设计指标,辅以几何、外观及特征等其他设计指标细化模型层次,设计了适用于矿山地下空间的离散LOD 模型。从语义的角度定义矿山地下空间不同应用所需实体要素的细节丰富度和视觉属性,为地下空间的认知活动提供合理、科学、高效的多尺度三维空间模型。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
商品与质量(2021年43期)2022-01-18
矿产勘查(2020年9期)2020-12-25
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
开放教育研究(2020年2期)2020-03-31
建材发展导向(2019年5期)2019-09-09
活力(2019年21期)2019-04-01
太空探索(2016年5期)2016-07-12
长江学术(2016年4期)2016-03-11
长江学术(2015年1期)2015-02-27