
基于虚拟现实技术的多视点图像重建算法设计
2022-03-27 11:12边丹,廖秦
成都工业学院学报 2022年1期
边 丹,廖 秦
(1.合肥科技职业学院 人文艺术系,合肥 230000;2.安徽建筑大学 艺术学院,合肥 230022)
随着科学技术的高速发展,图像识别与重建技术在越来越多的领域得到广泛应用,同时也受到了来自对图像质量水平要求高的行业需求的挑战[1-2]。传统的图像采集和图像重建是提前标定一个精度较高的目标事物作为参照,摄像机建立参照物与目标图像的相对关系,再通过导入计算机程序进行图像数据优化运算获取图像参数[3]。这种方法受目标图像环境影响较大,容易出现无稳定参照物、图像目标繁多、设备难以定位等状况[4-5]。虚拟现实(Virtual Reality,VR)技术是在20世纪产生发展的一种新型实用技术,集计算机技术、电子仿真技术于一体,主要是通过计算机模拟程序对仿真设备进行操控,营造出仿真的虚拟环境,给人以沉浸式的体验感受。目前VR技术在诸多行业的应用日益广泛。
本文基于上述传统图像重建技术存在的问题,结合VR技术,对多视点图像重建算法进行了研究设计,并总结基于虚拟现实技术的多视点图像重建算法所具备的优点。
1 基于摄像机标定的多视点图像采集
图像采集首先要根据摄像机的配置标准与目标图像方位,对摄像机位置与标定情况进行调整确定,建立摄像机成像模型。成像的过程主要是选择1个三维空间内的目标点,通过摄像机成像模型投射在二维平面上。为达到较理想程度的成像效果,成像模型一般选用针孔成像模型,针孔成像模型如图1所示。

(a)成像原理图
由图1可知,摄像机需要在多个不同的角度方位获取目标对象的多视点图像,在这个过程中摄像机和投影平面是可以移动的,以实现对目标图像的动态捕捉[6-7]。

采集到的数据传输至计算机处理程序,通过对多个图像样本标点变化进行单应矩阵运算,将所得结果进行线性分析,得出摄像机与平面模板显示的图像的相关参数。采集操作的流程如图2所示。
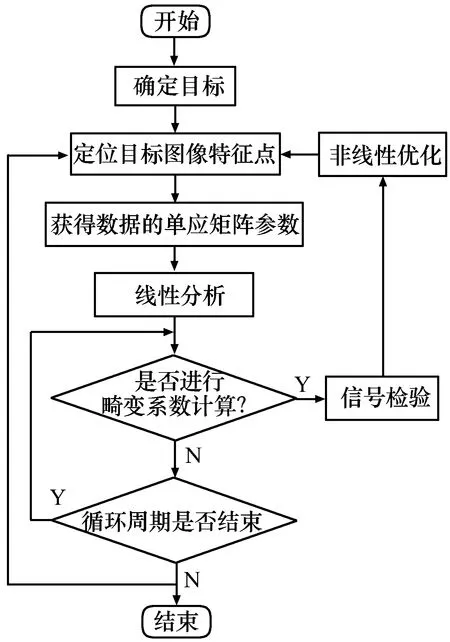
图2 基于摄像机标定的多视点图像采集流程
初始化是指对相机内部各项参数进行计算,得出参数的闭式解。这个操作过程不考虑相机镜头参数情况,同时也排除因镜头畸变而影响其他部分参数的情况。
非线性优化操作是在均值误差最小的情况下,使图像内所有目标特征点的多次投影的标定误差最小[8-9]。优化步骤主要是:降低迭代梯度,进行雅可比矩阵封闭形式的运算,对标点参数进行非线性优化。优化后得到的数据结果(包括摄像机内部参数以及平面模板的图像标点参数)保存在计算机数据库相应的文件夹内。
同时,摄像机程序会对摄像机采集图像过程进行同步的图像储存[10-11]。将摄像机采集到的图像信息录入到摄像机内处理程序,根据图像采集的环境状况(比如光影情况、噪点情况等)对图像数据信息进行处理,提取有用的图像特征信息,通过一定的分类标准进行信息的分类归纳,然后存储到机内数据储存库内。图像特征信息提取过如图3所示。

(a)特征畸变过程 (b)特征映射过程
2 基于VR技术的多视点图像重建
基于VR技术对多视点图像进行重建需要获取图像的轮廓图。获取图像轮廓首先要对目标图像进行图像背景分离,然后将图像导入计算机图像处理程序,通过背景减法分析运算,将目标事物图像与背景图像进行多标点对比,识别背景范围,进行图像分割完成背景分离,并对背景图像进行数据储存[12-13]。这种方法的操作原理是将多幅目标事物图像进行对比分析,特征点以外的相似部分则属于图像背景。该方法对图像拍摄环境要求较低,但对图像中的光影色彩变化的识别处理能力也比较弱,容易产生背景误判的情况,比如将颜色相似的前景事物与背景混淆。这种情况常出现在事物产生面积与背景部分重合的时候,因而无法清晰地将事物与背景进行图像划分。
多视点图像背景如图4所示。

(a)前置背景特征
在确定多视点图像背景后,进行特征点的检测提取。特征点是根据目标图像进行标定的、稳定的、能克服灰度反转的特征标点。根据特种点进行匹配,能够减少计算量,对图像的灰度信息影响很小,而且匹配精准度高,适用性强,对于相似度较低的图像素材也能够行较为准确的图像匹配。本文选取了尺度不变特征转换算法(Scale-invariant feature transform,SIFT)进行特征点的检测和提取,主要流程如图5所示。

图5 特征点的检测和提取流程
在平面模板上设定坐标系,成像公式为:
通过矩阵映射确定特征点,在特征点提取完成后,根据图像特征点和相应的SIFT局部特征描述子进行图像的特征匹配。以一幅图像为基础,选取其中任意一个特征点,在其他图像素材中寻找与其相似的特征点,将其进行匹配运算,如果相似度在匹配范围内,则成为一组匹配特征点。此时的多视点图像特征点匹配基本完成,删除主要特征点以外的图像标点,再对匹配后的图像进行细节修改和调整,并进行图像备份与储存[14-15]。
3 实验研究
为了验证本文提出的基于虚拟现实技术的多视点图像重建算法,与传统算法进行实验对比。重建实验环境如图6所示。
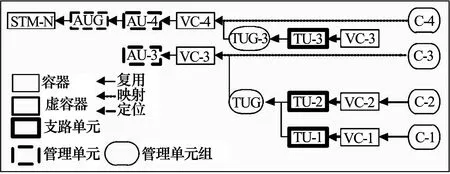
图6 重建实验环境
设置实验参数如表1所示:
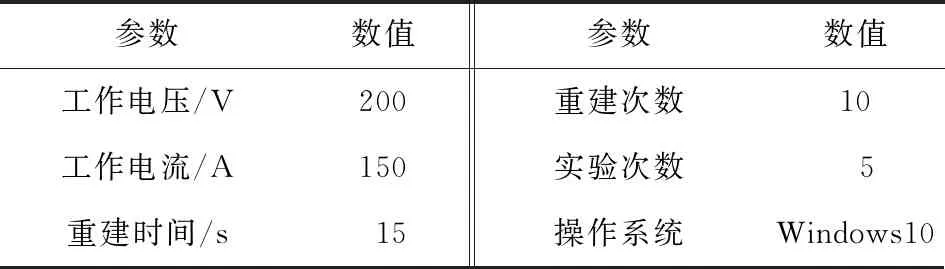
表1 实验参数
根据上述实验参数,选取本文算法与传统的基于数据挖掘的多视点图像重建算法(算法1)、基于信息分析的多视点图像重建算法(算法2)进行实验对比,得到的重建时间实验结果如图7所示。

(a)本文算法
由图7可知,本文算法重建延时远远小于传统算法,重建能力更强。
重建清晰度实验结果如图8所示。

图8 重建清晰度实验对比结果
由图8可知,本文算法的重建清晰度始终高于传统重建算法。
4 结语
本文算法管理成本较低,提高了资源的利用率。能够与多种类型的资源平台进行资源共享和数据传输,可操作的功能齐全,性能良好,且具有资源数据保护机制,用户能够实现较为自由的操作。具有应用保护,安全性强。综上,本文算法具有很强的图像重建能力,能够很好地实现信息分析,进而完成图像重建。
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
河南电力(2016年5期)2016-02-06
新闻前哨(2015年2期)2015-03-11
新闻前哨(2015年2期)2015-03-11
中国水利(2015年5期)2015-02-28
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
燕山大学学报(2014年3期)2014-03-11
