一种面向水下植被监测的仿生海龟设计
2022-03-27 05:59陈金言李俊杰仝金涛段睿珏王猛猛肖爱平
林业机械与木工设备 2022年3期
陈金言, 李俊杰, 仝金涛, 段睿珏, 王猛猛, 肖爱平, 黄 晨
(北京林业大学工学院,北京 100083)
在治理水体污染、恢复湖泊水体生态环境方面,除了各种治污工程外,水下植被生态修复也是一种重要的措施。水下种植水草以及水下植被信息采集的人工作业方式工作效率低且劳动强度大。近年来通过对水生生物的仿生学研究发现,海龟、海豚、企鹅以及各种鱼类等海洋生物主要依靠鳍状肢或尾翼的划水产生动力,尽管这些生物体形不一,但是他们却具有爆发力强、机动性高、稳定性好等共同特点[1]。仿生海龟是目前研究和应用较多的仿生机械产品,大多采用多电机控制,使用一个位旋电机外加一个拍旋电机的综合作用,使海龟的前翼实现预期的运动轨迹[2];或根据对海龟扑翼运动方式的分析,利用曲柄滑块机构和凸轮机构模仿实现海龟扑翼的运动规律,曲柄滑块机构实现水平运动,凸轮机构实现竖直运动,两个方向的运动同步进行,在关键点相互结合实现海龟扑翼的运动轨迹[3-4]。
本文设计了一种面向湖泊水下植被监测的仿生海龟,对其行走机构、转向机构、下潜机构、采集机械臂进行了创新设计与研究,虚拟样机仿真试验表明了该方案的可行性,能够实现水下植被的种植与采集。
1 仿生海龟的方案设计
基于水下作业需求考虑,仿生海龟在运动功能上应满足以下几点要求:(1)能够较好的直行,有一定的推进力;(2)能够灵活的转弯;(3)有下潜的能力;(4)有样本采集的能力。
1.1 运动功能实现
本设计并优化的仿生海龟尽量减少电机数量,从而降低仿生海龟的整体质量及控制难度。仿生海龟的主传动系统仅采用一个电机控制所有水翼的运动,两个前肢水翼采用连杆机构实现划水运动,要求划水时面积大,在划水完毕后,向前收翼准备下次划动时的面积小,具有足够的推进力;两后肢水翼仅需完成上下扑水,提供一定的推进力,采用凸轮机构控制其上下摆动;两前肢水翼之间采用差速器结构,可实现转向功能。仿生海龟机械传动方案简图如图1所示。

图1 仿生海龟机械传动方案简图
1.2 转向功能实现
仿生海龟三维模型如图2所示,整个机械装置仅使用一个电机便能实现其功能要求。在前肢两翼的差速器两端安装制动装置,在需要进行转向的时候,制动装置对一侧轴进行制动减速,由式(1)可知另一侧轴转速增加,从而实现转向。
(1)
当两轴以相同速度运转时,即前进状态,n1=n3=nH。当一轴抱死,n1=0时,n3=2nH,即一侧轴停止转动,另一侧轴的转速同时也增加,更加有利于海龟的转向。

图2 仿生海龟三维模型
2 仿生海龟关键结构的设计
2.1 前肢水翼连杆机构
海龟水翼末端的轨迹在一个运动周期内呈“8”字形,海龟水翼在上挥和下拍过程中,通过不断改变击水攻角,实现运动姿态的调节和前进运动[5]。根据连杆机构的特征,铰链四连杆机构可以实现比较复杂的刚体位置和轨迹,利用四杆机构连杆曲线的复杂性可以进行仿海龟推进机构的设计[6-7]。本文采用传统的刚体导引机构的方法来设计连杆机构,通过给出连杆的3个给定位置,找到曲柄与摇杆的位置与长度,从而设计出连杆机构,实现仿生海龟所需要的运动。
连杆机构在向后划水时需要提供足够的动力,因此需要其在向后划水时有较大的攻角,在设计此连杆机构时,给定3个确定的位置,连杆机构的设计图如图3所示,连杆与水平面的夹角分别为40°,60°和30°。连杆在向下划动时实现前进运动,在布置3个位置时要注意,让60°最大攻角的位置处于3个位置的最下端,40°的位置在左边偏上,30°的位置在右边偏上,以使其中垂线的交点,即固定铰链的位置在连杆最低点以上,能使其正确划水。

图3 连杆机构的设计图
di1xA+di2yA+di3=0
(2)
式中,i=2,3,…,n,xA和yA为A的绝对坐标。
di1=2[xB1(1-cosθ1i)+yB1sinθ1i
+xP1cosθ1i-yP1sinθ1i-xP1]
(3)
di2=2[yB1(1-cosθ1i)-xB1sinθ1i
+yP1cosθ1i+xP1sinθ1i-yP1]
(4)
di3=2(-xP1yB1-xP1yP1+xP1yP1+xB1yP1)sinθ1i)
+2(xP1xB1-xP1xP1+yP1yP1+yB1yP1)cosθ1i
(5)
给定连杆5个特定位置和姿态,代入方程即可求得铰接点A和B1的位置xA、yA和xB1、yB1。由于连杆机构的运动特性仅与其各个杆件之间的长度比有关,与绝对的长度无关,因此求出来相对的比值之后,可以根据仿生海龟的尺寸,对连杆尺寸进行适当的选择,经matlab仿真验证,连杆尺寸参数见表1。
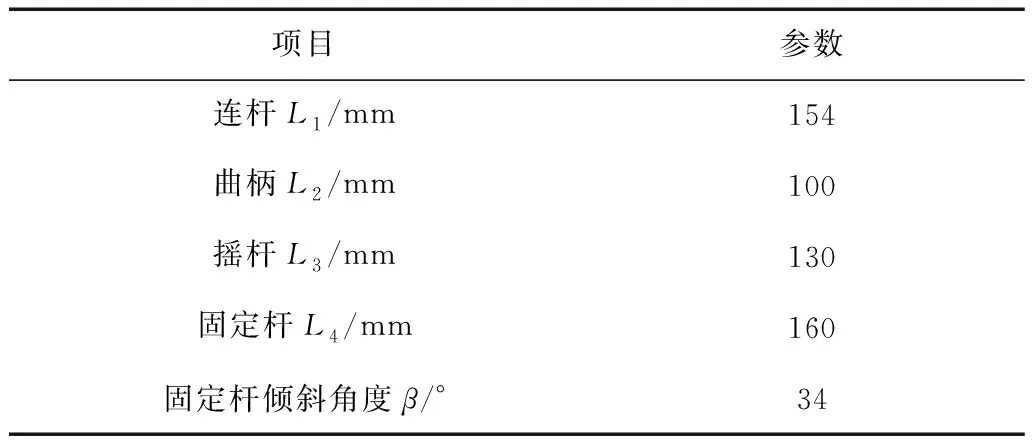
表1 连杆的参数表
2.2 转向差速机构
在行星齿轮机构差速功能实现的过程中,起关键作用的是两个行星齿轮,具有动轴特性的行星齿轮将从动环形齿轮传递过来的动力分配到两个半轴齿轮上,并且分配的大小根据实际情况而自动调节。当左侧遇到较大的阻力时,行星轮将较多的驱动力分配到右侧半轴齿上,当右侧遇到较大的阻力时,行星轮将较多的驱动力分配到左侧半轴齿轮上[8]。
转向差速机构采用现有的标准件,通过对齿轮强度进行校核,可以得到齿轮的参数见表2。
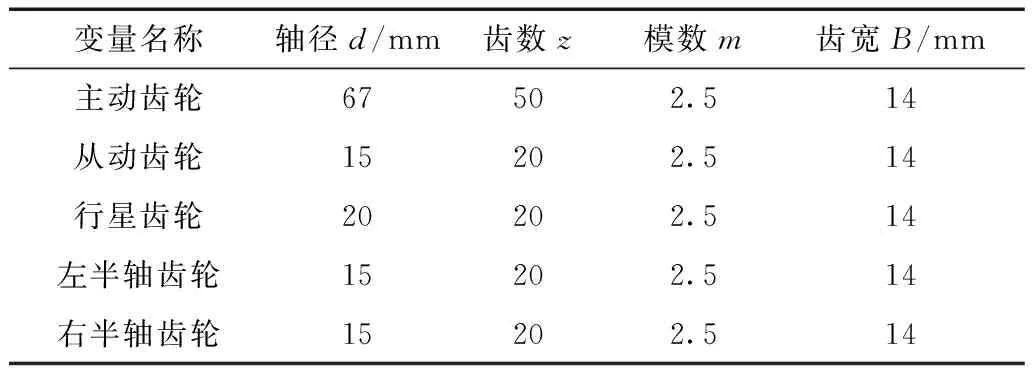
表2 差速器的参数表
3 虚拟样机仿真分析
利用动力学仿真软件ADAMS建立仿生海龟的虚拟样机模型,仿生海龟虚拟样机模型如图4所示,并分别对前肢的位移、速度与后肢的位移、速度等进行步态分析。

图4 仿生海龟虚拟样机模型
前肢位移与速度曲线如图5所示,通过一个电机带动差速器进而带动前肢的摆动,前肢主要是曲柄连杆机构,其中的机架与地面添加固定副,曲柄与差速器中的小锥齿轮轴固定副连接,通过轴的转动来带动曲柄的转动,连架杆与摇杆均与其相连的杆添加转动副关系,从而使曲柄摇杆机构达到相应的运动位移曲线。由前肢的速度曲线可以看出来,前肢不仅在划水面积上能够满足提供足够前进动力的要求,而且还具有一定的急回特性,在向后划水的时候以较快地速度划开,向前伸展准备下次划水时,以较小的攻角和较慢的速度进行。

图5 前肢位移与速度曲线
后肢位移曲线如图6所示,后肢的运动主要是上下的摆动,类似于摇杆机构。通过电机驱动锥齿轮轴上的凸轮转动,来带动后肢的上下摆动。主要是在凸轮与后肢之间添加凸轮副约束,使其来完成固定的运动状态。由后肢的速度曲线可以看出,后肢的摆动由最高端摆向最低端,速度也是从零开始不断加速,加速到最大值之后开始减速,当速度减为零的时候,后肢也就摆动到了最低端。然后和之前一样,再由最低端运动到最高端,实现一个周期的运动。
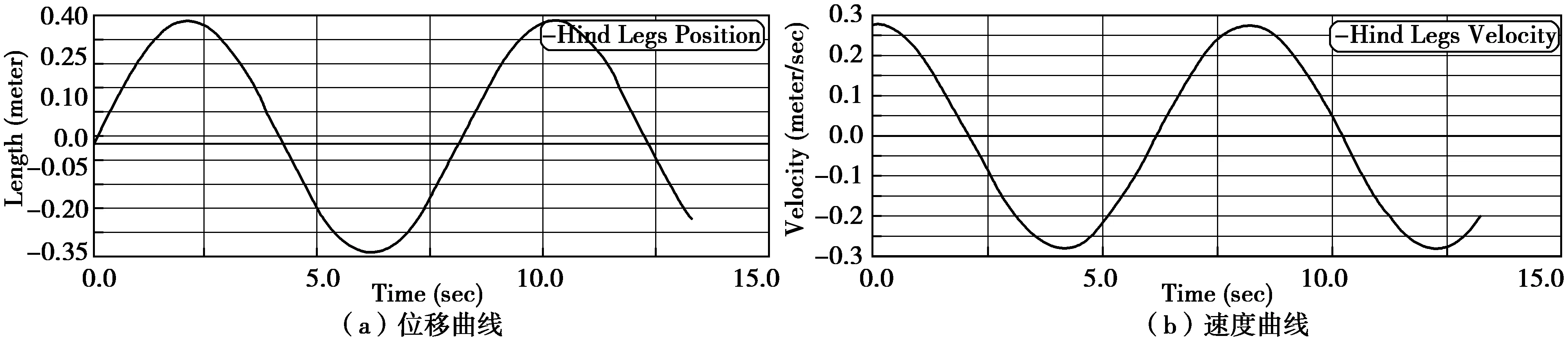
图6 后肢位移曲线
4 结束语
利用海龟运动的水翼法推进装置进行运动,具有较强的机动性与灵活性,能适应不同的水域要求进行植被监测。后续的设计可加入电控装置,通过安装摄像头对水下的植被进行探测,使用超声波传感器对前方的障碍进行探测,通过反馈的电流和电压的大小,对制动装置加以控制,还能够实现自动避障的功能。该机械结构的设计,不仅贴合了海龟的真实运动规律,更为水下植被修复提供了全新的思路和探究方向。
猜你喜欢
大型铸锻件(2022年1期)2022-02-12
科技创新与品牌(2020年5期)2020-06-15
学校教育研究(2020年11期)2020-06-08
新农业(2019年5期)2019-06-28
科技视界(2018年21期)2018-12-10
科学家(2017年24期)2018-01-11
大自然探索(2017年7期)2017-07-25
文艺生活·中旬刊(2017年4期)2017-05-25
发明与创新·大科技(2016年9期)2016-09-19
建筑工程技术与设计(2015年26期)2015-10-21