本体感觉训练对踝关节损伤后姿势稳定性及肌力恢复的研究
2022-03-18 09:46梁珊珊孟庆华
河北体育学院学报 2022年2期
梁珊珊,孟庆华
(1.天津市体育综合保障中心 体育科研与反兴奋剂部,天津 301699;2.天津体育学院 社会体育与健康科学学院,天津 301617)
人们在运动中不可避免地会产生各种各样的损伤,踝关节损伤是其中最常见的一种。而在跑步、跳跃等较为剧烈、高强度的运动中踝关节损伤率则高达25%—50%[1]。踝关节损伤的特征是神经肌肉控制减少,本体感觉功能不同程度地弱化,以及踝关节损伤的反复发作[2]。倘若踝关节反复损伤,会造成其周围肌群的弹性组织损伤,产生关节性抑制,踝关节周围肌萎缩,影响运动单位的募集,使踝关节周围的肌力下降,进而造成本体感受力的降低,最终改变中枢神经系统的感觉整合机制[3]。一般情况下,因为机体内部的神经肌肉系统的补偿作用,人们通常能够对突然发生的不确定情况做出应急性反应,以避免踝损伤。功能性踝关节不稳患者,由于本体感觉的下降,神经肌肉系统的调控机制产生了变化,动静态平衡能力均显著下降,最终引发踝关节反复损伤问题,陷入恶性循环。因此在功能性踝关节不稳(FAI)患者的康复训练中,既要解决肌肉萎缩、肌力下降的问题,也要解决运动单位募集减少的问题,同时有必要修复本体感受器的正常感受及传递功能,从而提高神经肌肉的控制功能。
1 研究对象与方法
1.1 研究对象
根据国际踝关节协会提出的慢性踝关节不稳者筛选标准[4],结合汉化的坎伯兰踝关节不稳量表[5](Cumberland Ankle Instability Tool,CAIT),通过问卷筛查选取功能性踝关节不稳且无训练基础的在校女大学生30名。将筛选出的受试者随机分为2组,一组进行本体感觉训练,另一组作为对照组。对照组的学生在实验前、实验中均未系统进行训练及课程学习,在平时则会定期查问他们的课外锻炼情况,并尽量控制受试者的活动量。本体感觉训练组除参加特定的本体感觉训练外,其他与对照组完全一致。此外,为了排除优势脚与非优势脚的差异,本次实验只选取右脚为优势脚且右侧踝关节不稳者作为研究对象。
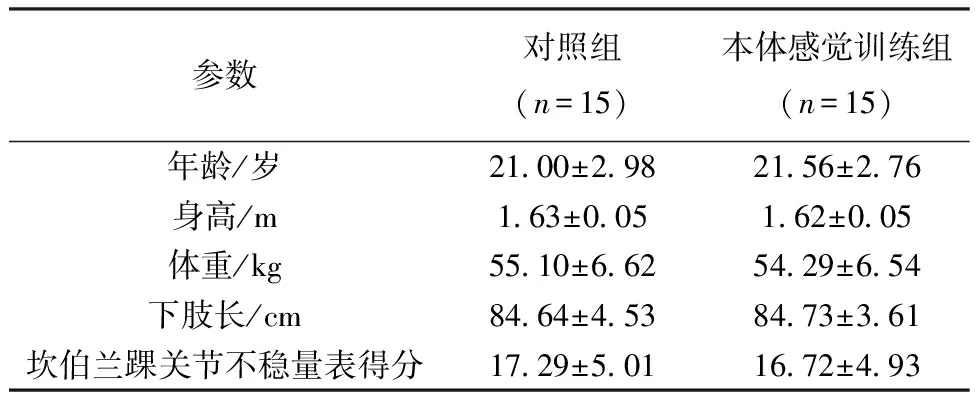
表1 受试者基本情况信息表
1.2 研究方法
应用三维测力台(1 000 Hz,9281CA,Kistler,瑞士)系统采集静态单腿支撑和无初速度的单腿落地动作的动力学数据,并结合等速肌力测试,对测试结果进行统计分析,在经过12周的训练后,对各组受试者再次进行测量,对比2组受试的姿势稳定性及踝关节周围肌肉力量的变化。
1.2.1 静态姿势稳定性测试
首先测试静态单腿支撑时的姿势稳定性,受试者单脚(右脚)站在三维测力台的中央位置,双手自然置于腰间,目视前方一点。受试者在听到“开始”的口令后,维持单腿站立姿势20 s,测试过程中头部要保持正直,直到听到相关提示音后结束测试。
1.2.2 动态姿势稳定性测试
受试者向前方进行患侧单脚(右脚)落地动作测试。将20 cm高的台阶放置于距离测力台边缘5 cm处,测试开始时要求受试者双足站于台阶上,双手自然放于腰间,面向测力台站立并保持目视前方。当听到测试人员发出的“开始”口令后,受试者应先向前伸出测试腿对准测力台的中心位置,然后向前方自然移动身体重心后并迅速收起支撑腿跳离台阶,以测试腿落在测力台中心位置为宜。在测试前要注意提醒受试者保持无初速度落下(即跳起瞬间迅速收起支撑腿),以防止向前方向的力对测试结果产生影响。并且要求所有受试者在测试腿落地后尽快使身体稳定,防止跌倒或另一侧腿着地导致测试失败。其间保持头部端正、目视前方、双手自然放置于腰间的单脚静止站立姿势15 s,直到听到测试人员给出的提示音后结束测试。
1.2.3 踝关节的等速肌力测试
在本实验研究中选取60 °/s、180 °/s两个角速度分别代表中速测试和快速测试[6]。要求受试者每个角速度下以其最大速度重复其运动6次,并且在整个测试期间关节运动的范围保持恒定。
1.2.4 测试指标
(1)依据分组进行身体形态的测量,包括身高、体重、下肢长等。
(2)静态姿势稳定性测试。记录足底压力中心(COP)相关数据,计算的相关参数有压力中心动摇距离、压力中心前后最大动摇径、压力中心左右最大动摇径、压力中心平均摆速、压力中心前后摆速、压力中心左右摆速、压力中心偏移面积,计算公式如下。
压力中心动摇距离:
压力中心前后最大动摇径:
DX=MAXX-MINX
压力中心左右最大动摇径:
DY=MAXY-MINY
压力中心平均摆速:
COPM=COPPL/t
压力中心前后摆速:
压力中心左右摆速:
压力中心偏移面积:
SA=DX×DY
上述所有指标均与压力中心有关,可以反映姿势稳定程度。其中X、Y、Z分别为每一时刻COP在各个方向上的分量,X代表前后方向的COP偏移,Y代表左右方向的COP偏移,Z则代表垂直方向的COP偏移。压力中心轨迹长度是直接反映压力中心如何变化的指标,最为全面。而其中的最大动摇径指标与压力中心偏移面积指标很容易受到偶然性变化的影响。压力中心前后摆速、压力中心左右摆速以及压力中心平均摆速则反映单位时间内压力中心指标变化的程度。
(3)动态姿势稳定性测试。动态姿势稳定性包括:动态稳定指数(DPSI)、前后方向的稳定指数(APSI)、左右方向的稳定指数(MLSI)、垂直方向的稳定指数(VSI)[7]。以上动态姿势稳定性指标均由GRF(地面反作用力)推算而来,公式如下。
APSI=√[∑(0-GRFX)2/所采集数据点的数量]/体重
MLSI=√[∑(0-GRFY)2/所采集数据点的数量]/体重
VSI=√[∑(体重-GRFZ)2/所采集数据点的数量]/体重
DPSI=√[∑(0-GRFX)2+∑(0-GRFY)2+∑(体重-GRFZ)2/所采集数据点的数量]/体重
动态稳定性指数(DPSI)由地面反作用力(GRF)与前、后、左、右和垂直方向的稳定指数相结合计算而来,其综合反映了前后方向、左右方向和垂直方向的稳定性指标。该参数值越低,稳定性越高,反之则稳定性低[8]。动态稳定性指标反映了3个方向的动态稳定性变化,其中前后方向与左右方向的数值分别从地面反作用力的X轴和Y轴的零值开始,垂直方向则基于受试者自身的体重。有研究[9]显示,受试者单脚落地后,动态稳定性指数的最佳时间点是原地站立3 s。由于每个受试者的体重差异较大,因此垂直方向的地面反作用力需要进行标准化处理(地面反作用力峰值与体重的比值)。
(4)等速肌力测试指标包括背屈峰值力矩(PTD)、跖屈峰值力矩(PTP)、内翻峰值力矩(PTI)和外翻峰值力矩(PTE)。
1.2.5 本体感觉训练运动处方
运动目的:训练FAI患者的本体感觉和踝关节周围肌肉力量,增强其姿势稳定性。运动频率:3次/周;运动时间:60 min,即(每组动作循环练习10-12 min+休息3-5 min)×4组。
锻炼内容:本体感觉训练主要采用垫上练习并结合瑞士球、弹力带、平衡垫等小器械进行锻炼,锻炼期间不再参与其他体育运动。具体包括:①闭眼单脚站立:每组受试者均在闭眼状态下单脚站立30 s,左右脚均完成算1组,每次训练2组。②闭眼单脚高抬腿站立:每组受试者均在闭眼状态下单脚站立30 s,左右脚均完成算1组,每次训练2组。③平衡盘单脚站立:每组受试者均在闭眼状态下单脚站立30 s,左右脚均完成算1组,每次训练2组。④站立于平衡盘上正向抛接瑞士球训练,5次/组×3组。⑤站立于平衡盘上侧向抛接瑞士球训练,5次/组×3组。⑥单腿站立于平衡盘上,缓慢下蹲练习,3次/组×3组。⑦BOSU球单脚稳定性练习,左右交替12次/组×2组,要求注意力集中,提醒训练者踝关节主动发力,稳定后进行下一次蹬踏。⑧单腿站立于平衡盘上,下蹲抓物练习,10-15次/组×2组。⑨两人单脚站立,掌心对抗互推练习,对抗过程中尽量维持身体平衡稳定,5次/组×3组。⑩快速“十”字跳,40次/组×2组,保持双脚并拢,并在跳跃过程中尽量保持躯干稳定。
1.2.6 数理统计法

2 实验结果与分析
2.1 静态姿势稳定性测试结果分析
从表2可以看出,本体感觉训练组在经过12周的训练后,除压力中心前后最大动摇径无显著性差异外,压力中心动摇距离、压力中心左右最大动摇径、压力中心平均摆速、压力中心前后摆速、压力中心左右摆速与压力中心偏移面积6个指标,与训练前比较均有显著性提高。而对照组训练前后各指标均无显著性差异。
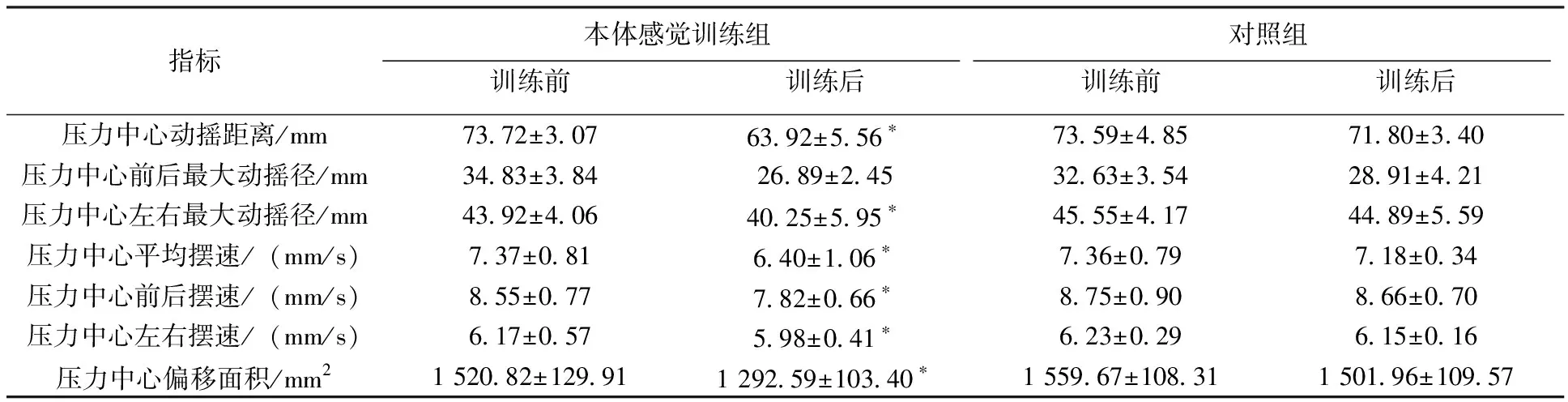
表2 训练前后静态姿势稳定性各指标对比
2.2 动态姿势稳定性测试结果分析
从表3可以看出,对照组在训练前后各指标均无明显差异(P>0.05);本体感觉训练组在训练后,除垂直方向的稳定指数(VSI)不存在显著性差异外,前后方向的稳定指数(APSI)、左右方向的稳定指数(MLSI)以及动态稳定指数(DPSI)都存在显著性差异(P<0.05)。
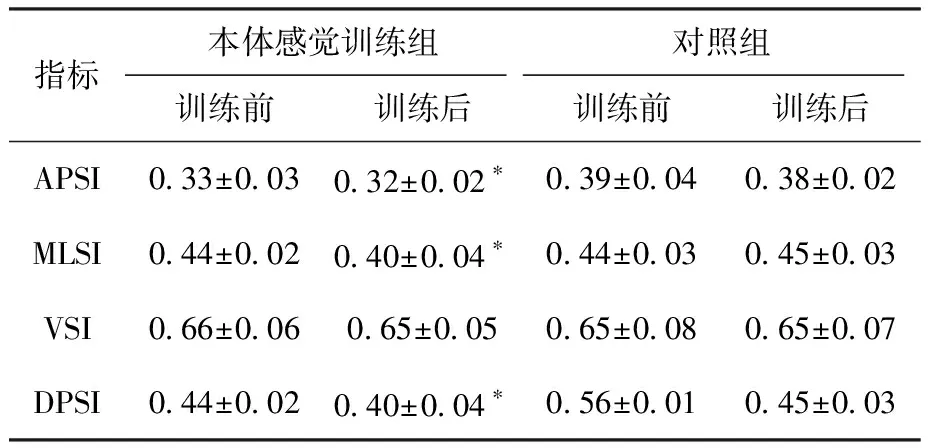
表3 训练前后动态姿势稳定性指标对比
2.3 踝关节等速肌力测试结果分析
表4显示的是角速度分别在60 °/s和180 °/s时,两组训练前后分别在跖屈、背屈、内翻、外翻4种运动状态下峰值力矩数据。可以看出,对照组训练前后各指标均无明显差异;本体感觉训练组训练前后4项指标均存在显著性差异(P<0.05),其中在180 °/s时背屈峰值力矩(PTD)存在非常显著性差异(P<0.01)。造成本体感觉训练组在训练前后跖屈差异明显的原因,可能是训练内容中存在一些不平衡因素,需要机体在较短时间内做出反应,从而使背屈肌群(胫骨前肌、趾长伸肌和拇长伸肌)可以快速工作达到稳定状态的能力。此外,踝关节肌群向心肌力测试中,在不同角速度下本体感觉训练组与对照组踝关节肌群向心峰力矩都随着角速度的增加而减小,当角速度从60 °/s增加到180 °/s时,跖屈肌群峰力矩分别从24.47 N·m和24.20 N·m降至15.27 N·m和15.60 N·m;背屈肌群峰力矩分别从6.20 N·m和6.27 N·m降至5.33 N·m和5.47 N·m;内翻肌群峰力矩分别从10.33 N·m和10.07 N·m降至8.27 N·m和8.23 N·m;外翻肌群峰力矩分别从7.60 N·m和7.06 N·m降至7.47 N·m和7.37 N·m。这一研究结果同希尔方程所得出的力矩速度关系相一致。
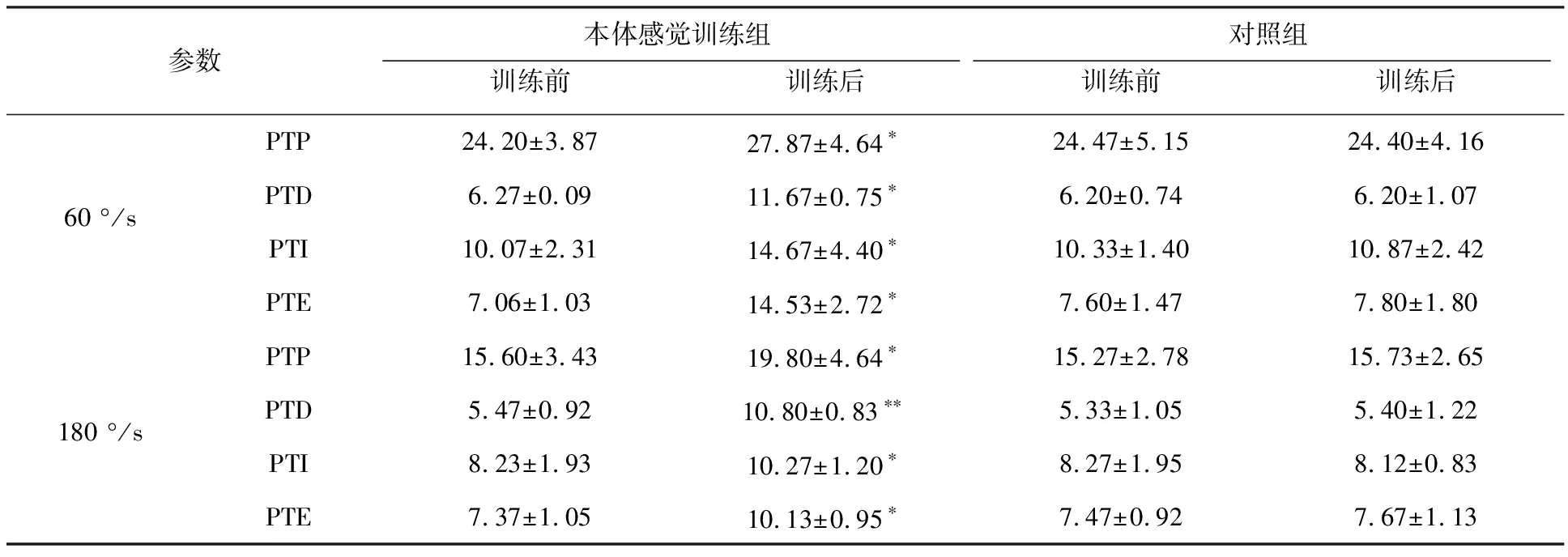
表4 训练前后峰值力矩数据对比 N·m
3 讨论
机体的姿势控制能力是人体进行所有日常活动的先决条件,它是由人体多个系统共同参与的一个复杂的过程。不仅依赖于视觉、前庭和本体感觉的信息输入,还要在中枢神经系统的整合调控下通过肌肉控制来实现,此过程中的任何一个环节受到干扰都会影响到整个机体姿势控制的能力。在该研究中,人体的姿势控制能力通过压力中心的动摇指数来反映。压力中心动摇指数越小说明稳定性越好,反之则差。
踝关节既是人体中一个十分重要的关节,又是人体中的重要本体感受器官,它可以向大脑提供大量的本体感觉的输入[10]。在运动中踝关节通过本体感受信息的传输来参与反馈信息的整合。踝关节为高级中枢神经系统提供必要的本体感受信息[11],同时接收来自中枢神经系统的反馈并响应相应的环境和情况。有研究表明,关节韧带的撕裂不仅影响关节感觉的输入[3],更会影响中枢神经系统信号的传入。这些因素可能导致关节早衰,并导致动态不稳定,进而影响关节平衡和协调。大量临床研究表明,患者的踝关节在受到损伤之后会出现单腿站立能力较差的情况,就算不考虑关节的损伤、肌肉的拉伤,其本体感觉的缺失也足以引起整个关节功能的退化[12]。在运动员关节出现损伤之后,要想保持其运动水平和成绩,不但要对其关节、肌力进行康复,在后期也要注重其本体感受功能的恢复,因为这将直接影响运动员的整体恢复效果。
静态姿势稳定性是身体重心在空间处于瞬时稳定的某种姿势控制的能力[13]。在经过12周的本体感觉训练后,各个静态姿势稳定性指标以及动态姿势控制能力对比训练前以及对照组均显著性提高。本体感觉训练采用瑞士球、弹力带、平衡垫等,在不稳定状态下训练,刺激人体肌肉紧张,达到一定的效果。在脊柱的主导驱动下,结合下肢的主动发力和旋转进行一系列身体重心转换和动态拉伸,在整个练习过程中充分调动下肢肌肉发力以达到平衡稳定状态,使髋、膝、踝等关节达到充分活动。一方面核心区以及下肢髋、膝、踝关节的屈、伸肌的耐力与力量得到了锻炼;另一方面,也提高了关节位置的静态及动态感知能力以及关节活动的感知能力,增强了肌肉、肌腱、关节囊、韧带的本体感觉。
踝关节损伤通常发生在踝关节的趾屈内翻中,并且外侧韧带和肌腱更容易受伤[14],这会直接影响踝关节的稳定性。增加趾屈肌群及外翻肌肉的力量,如胫骨前肌、腓骨长肌和腓骨短肌,有助于限制功能活动期间脚踝的过度内翻运动。提高外翻肌群的能力,可以提高身体着陆运动的动态姿势稳定性[15]。研究表明,系统的力量训练不仅可以提高踝关节周围肌肉的强度,还可以改善功能性踝关节不稳定患者的动态姿势稳定性。本研究经过12周的本体感觉训练后,对踝关节受损人群再次进行等速肌力测试,发现中速和快速运动时趾背屈肌群及内外翻肌群的力量都得到了明显的提升,尤其是背屈肌及外翻肌群的力量提升更为明显,而这正是防止踝关节损伤的关键因素。
4 结论与建议
经过12周的干预训练后,本体感觉训练组的压力中心动摇距离、左右最大动摇径、平均摆速以及压力中心偏移面积等指标均显著降低,表明静态姿势稳定性得到显著性提高;在动态姿势稳定性测试中,本体感觉训练组前后方向、左右方向稳定指数以及总体稳定指数均得到了显著提升;本体感觉训练组训练后的峰值力矩提高,肌肉力量明显增加。
相对于传统的力量训练,本体感觉训练具有节奏感及趣味性,且在功能性踝关节不稳患者中更易开展。12周的本体感觉训练更能均衡发展功能性踝关节不稳患者的稳定性,显著提高本体感觉、中枢神经系统的调控能力,以及增强肌肉力量等,从而在整体上提高了机体的姿势稳定性。因此,在今后的踝关节不稳康复训练中可以适当加入更具有趣味性的本体感觉训练。
猜你喜欢
中老年保健(2021年7期)2021-08-22
文苑(2020年5期)2020-06-16
小学生学习指导(低年级)(2020年3期)2020-06-02
中国临床医学影像杂志(2019年4期)2019-06-18
中国生殖健康(2019年10期)2019-01-07
制造业自动化(2017年2期)2017-03-20
中华骨与关节外科杂志(2016年6期)2016-05-17
中国民族医药杂志(2016年5期)2016-05-09
图书与情报(2013年1期)2013-11-16
卷宗(2013年6期)2013-10-21