基于带抑制弧的Petri网表示的嵌入式系统模型的子网化简
2022-03-18 05:01夏传良
计算机应用与软件 2022年3期
张 玮 夏传良
(山东建筑大学计算机科学与技术学院 山东 济南 250101)
0 引 言
嵌入式系统在无人机、物联网和医疗设备等领域都有广泛应用。对可靠性、正确性和实时性的高要求是嵌入式系统的特征[1-2]。为了保证系统的正确性和有效性,需要在嵌入式系统的设计中采用形式化的建模方法。
目前可用于描述嵌入式系统的模型主要有有限状态机、数据流图、Petri网[3]和SysML(Systems Modeling Language)。基于Petri网表示的嵌入式系统PRES+模型是一种用于嵌入式系统建模、验证和分析的比较有效的方法[4-8]。
为了设计嵌入式系统,Cortés等[4]提出了一种基于PRES+的嵌入式系统的形式化计算模型。Karlsson等[5]提出了一种PRES+与基于组件的系统级设计集成的方法。Xia等[7-8]提出了PRES+模型的细化方法和合成方法。
加入抑制弧可以增强Petri网的建模能力[9-10]。为了提高PRES+的建模和验证能力,我们在PRES+模型中加入抑制弧,得到基于带抑制弧的Petri网表示的嵌入式系统(PIRES+)模型。但是,在PIRES+建模和验证复杂的嵌入式系统过程中存在状态空间爆炸问题。
为了解决Petri网的状态空间爆炸问题,国内外学者提出了多种模型转换方法,其中化简操作是一种重要的转换方法。
Boucheneb等[11]提出了一种时间Petri网(TPN)的部分化简技术。Berthomieu等[12]给出了一种减少库所和变迁数量的方法。对于PRES+系统,Xia[6]提出了化简规则,在一定条件下,化简后得到的PRES+与原模型完全等价。
本文的主要动机是给出PIRES+保性化简规则,使得化简前后保持可达性、功能性和实时性等性质不变,不用进行可达空间分析,从而达到缓解状态空间爆炸的目的。
1 相关概念
定义1PRES+模型N=(P,T,FI,FO,M0),其中:P={p1,p2,…,pm}是库所的有限非空集合;T={t1,t2,…,tm}是变迁的有限非空集合;FI⊆P×T是一组输入弧的有限非空集合,定义了库所到变迁的输入关系流;FO⊆T×P是一组输出弧的有限非空集合,定义了变迁到库所的输出关系流;M0是N的初始标记。托肯携带了时间和数据信息。对于每一个变迁,都存在与之相关的变迁函数、最小变迁时延和最大变迁时延。
将抑制弧加入PRES+模型中,得到PIRES+模型。
定义2PIRES+模型N={P,T,FI,FO,I,M0},其中:P={p1,p2,…,pm}是库所的有限非空集合;T={t1,t2,…,tm}是变迁的有限非空集合;FI⊆P×T是一组输入弧的有限非空集合,定义了库所到变迁的输入关系流;FO⊆T×P是一组输出弧的有限非空集合,定义了变迁到库所的输出关系流;I⊂P×T(I∩F=∅)是抑制弧的有限非空集合;M0:P→N0是N的初始标记,其托肯携带了时间和数据信息。
k=
只有当抑制库所为空时,被抑制的变迁才会被触发。在图形上,抑制弧将库所连接到变迁,并且弧在变迁处以空圆环结束。其余约束与PRES+模型的约束相同。
以下给出两个PIRES+模型具有相同可达性、功能性和实时性的概念。
定义3两个PIRES+模型N1和N2若有相同的可达性需满足:
(1)N1和N2有相同数量的输入库所和输出库所。
(2) 若把相同数目的托肯数放入N1和N2的输入库所中,那么N1和N2的相应输出库所得到的托肯数相同。
定义4两个PIRES+模型N1和N2若有相同的功能性需满足:
(1)N1和N2有相同的可达性。
(2) 若把具有相同类型标识的托肯放入N1和N2的输入库所中,那么N1和N2的相应输出库所得到的托肯的类型标识也相同。
定义5两个PIRES+模型N1和N2若有相同的实时性需满足:
(1)N1和N2有相同的可达性。
(2) 若把具有相同时间标识的托肯放入N1和N2的输入库所中,那么N1和N2的相应输出库所得到的托肯的时间标识也相同。
2 化简规则
2.1 基于T型子网的化简规则
在PIRES+模型中,基于T型子网化简规则(RST)的前提条件是存在一个T型子网满足定义6。示例见图1,T型子网部分被化简为变迁t。

图1 化简规则RST示例
定义6若PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}是模型N={P,T,FI,FO,I,M0}的子网,需满足以下条件:
(1)PR⊆P,TR⊆T,PR≠∅,TR≠∅。
(2)FIR=FI∩{(PR×TR)|(PR×TR)∉I),FOR=FO∩(TR×PR),IR=I∩{(PR×TR)|(PR×TR)∈I}。

(4) {tin,tout}⊆TR,tin是NR的唯一输入变迁,tout是NR的唯一输出变迁。
(5) 对于∀t∈TR,存在变迁函数f:τ(p1)×τ(p2)×…×τ(pn)→(q),·t={p1,p2,…,pn},q∈t。
(6) 对于∀t∈TR,存在最小变迁时延d-和最大变迁时延d+,两者均为非负实数且满足d-≤d+。
(7) 子网中的抑制弧不会造成网的死锁。
(8) 同一组库所和变迁不能同时存在有向弧和抑制弧。
定义7对于PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}的变迁集TR-{tin,tout}存在变迁函数fR。对于TR-{tin,tout},∃fR:τ(p1)×(p2)×…×τ(pn)→τ(q),其中:(TR-{tin,tout})={p1,p2,…,pn};q∈(TR-{tin,tout})。
以图1为例,因为变迁t1和变迁t3是串联关系,变迁t2和变迁t4是串联关系,t1与t2、t3与t4又分别是并联关系,所以fs=(f1∘f3)‖(f2∘f4)(符号∘ 表示复合操作,符号‖表示并列操作)。


假设1假设PIRES+模型的T型子网NR={PR,TR,FIR,FOR,IR,MR,0}满足:
(1) 在一个执行过程中(托肯从tin流入通过NR再从tout流出),如果tin被触发则tout也会被触发。
(2) 对于PR,如果在初始状态下无托肯,则在执行过程后也不含托肯。
(3) 在tin被触发前和tout被触发后,∀t∈TR-{tin,tout},t不处于使能状态。

(1)P′=P-PR。
(2)T′=T-TR+{t}。



(6)fR=fout∘fs∘fin。

(8)I′=I-IR。



因为N′-N1=N-N2,所以N′和N有相同的可达性、功能性和实时性。
2.2 基于P型子网的化简规则
在PIRES+模型中,基于P型子网化简规则(RSP)的前提条件是存在一个P型子网满足定义10。示例见图2,P型子网部分被化简为库所p。

图2 化简规则RSP示例
定义10若PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}是PIRES+模型N={P,T,FI,FO,I,M0}的P型子网,需满足:
(1)PR⊆P,TR⊆T,PR≠∅,TR≠∅。
(2)FIR=FI∩{(PR×TR)|(PR×TR)∉I),FOR=FO∩(TR×PR),IR=I∩{(PR×TR)|(PR×TR)∈I)。

(4) {pin,pout}⊆PR,pin是NR的唯一输入库所,pout是NR的唯一输出库所。
(5) 对于∀t∈TR,存在变迁函数f:τ(p1)×τ(p2)×…×τ(pn)→τ(q),·t={p1,p2,…,pn},q∈t·。
(6) 对于∀t∈TR,存在最小变迁时延d-和最大变迁时延d+,两者均为非负实数且满足d-≤d+。
(7) 子网中的抑制弧不会造成网的死锁。
(8) 同一组库所和变迁不能同时存在有向弧和抑制弧。
定义11对于PIRES+模型NR={PR,TR,FIR,FOR,IR,MR,0}的变迁集TR存在变迁函数fR。对于TR,∃fR:τ(p1)×τ(p2)×…×τ(pn)→τ(q),其中:·TR={p1,p2,…,pn};q∈TR·。
以图2为例,因为变迁t1和变迁t3、t2是串联关系,变迁t4和变迁t3、t2是串联关系,t3与t2又分别是并联关系,所以fs=f1∘ (f3‖f2)∘f4。


假设2假设PIRES+模型的P型子网NR={PR,TR,FIR,FOR,IR,MR,0}满足:

(2)PR如果在初始状态下无托肯,则在执行过程后也不含托肯。

(1)P′=P-PR+{p}。
(2)T′=T-TR。



(8)I′=I-IR。


因为N-N1=N′-N2,所以N′和N有相同的可达性、功能性和实时性。
3 应用实例
本节以一个基于手机通信模型的简化实例来说明PIRES+模型化简规则的有效性。
系统初始化后,首先进行终端和键盘的初始化,然后打印无线通信菜单,通过创建键盘控制子程序完成手机号的拨入与拨出。该系统的PIRES+模型如图3所示。

图3 基于嵌入式的手机通信模型
在该模型中,各变迁的含义为:t1表示系统初始化;t2表示终端初始化;t3表示键盘初始化;t4表示打印无信通信菜单;t51表示接受键盘输入;t52表示控制命令判断;t53表示无效信息输入;t54表示拨入号码;t55表示拨出号码;t56表示系统循环等待;t61表示检测是否停止;t62表示停止;t63表示未停止;t7表示返回。
该PIRES+模型中虚线所标注部分为T型子网N1,使用基于T型子网的化简规则RST进行化简得到初步化简模型N′,结果如图4所示。

图4 使用RST规则后的化简结果
图4中,f5=f51∘ ((f52∘ (f54‖f55))‖f53)∘f56,a5=a51+max(a52+max(a54,a55),a53)+a56,b5=b51+max(b52+max(b54,b55),b53)+b56。根据定理1得,所得的初步简化模型N′与原模型有相同的可达性、功能性和实时性。
对于模型N′,虚线所标注部分为P型子网N2。使用基于P型子网的化简规则RSP进行化简,得到模型N″(如图5所示)。

图5 使用RSP规则后的化简结果

对于模型N″,虚线所标注部分可用基于T型子网的化简,得到最终的简化模型Nr(如图6所示)。
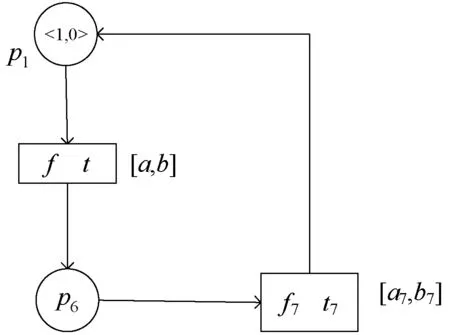
图6 最终化简结果

综上所述,最终得到的模型Nr与原模型N有相同的可达性、功能性和实时性。
4 结 语
本文在PRES+的基础上加入抑制弧,得到PIRES+模型。PIRES+模型增强了建模能力,但是在建模和分析过程中存在状态空间爆炸问题。为了缓解此问题。本文提出PIRES+的两种化简规则,并且证明了化简后所得模型与原模型有相同的可达性、功能性和实时性。本文的实例说明了该化简规则的有效性。
猜你喜欢
汽车实用技术(2022年13期)2022-07-19
中学课程辅导·高考版(2019年4期)2019-04-25
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
中学生数理化·八年级数学人教版(2016年1期)2016-03-16
物联网技术(2015年10期)2015-11-10
图书馆界(2013年5期)2013-03-11
现代电子技术(2009年6期)2009-05-31
电子设计应用(2004年7期)2004-09-02