
基于ZYNQ7020的偏振模式检测系统设计
2022-03-17 10:15康健马伟李皓李沅
电子测试 2022年5期
康健,马伟,李皓,李沅
(中北大学信息与通信工程学院,山西太原,030051)
0 引言
太阳光在射入地球大气层之后受到大气层中多种空气成分的散射以及地面、水面等的反射会形成部分偏振状态的偏振光,这些部分偏振光形成的偏振状态分布模式会受太阳位置、大气成分分布等因素影响。这一特性可以作为利用偏振光进行导航的参考依据。
哈尔滨工业大学的卢鸿谦等人将偏振光导航引入地磁、管道和卫星导航,形成了一种新的组合导航系统,通过偏振光导航数据实时修正惯性导航系统长时间工作累积的误差,取得了更好的导航精度[1-3]。大连理工大学的褚金奎教授领导的研究团队研制了一种纳米金属光栅偏振检测器,将其应用于船队编组中,引入了太阳位置数据,可实时修正天空偏振数据[4-7]。清华大学的赵开春等人制作了多种旋转式偏振检测设备,装置小巧,并且获得了不错的精度。
中北大学的王玉波、刘俊等人基于一种改进的偏振角模型,提出了一种三通道偏振成像系统,与常用的点源式测量方式相比,该方法有更高的解算精度和更宽的视野范围。
1 天空偏振模式的检测方法
太阳光在射入大气层之后受到各种大气成分的散射等影响后主要形成的是部分偏振光,所以斯托克斯矢量(Stokes)是大气偏振探测领域最常用的测量方法,可表示为:

在自然环境中,偏振光的V分量很微弱通常忽略不计。
DOP为偏振度,可表示为:
设入射偏振光E-矢量与探测器参考正方向的夹角为偏振角AOP,可表示为:

则光电转换器件检测到的入射光强Iin与Stokes矢量之间本文采用旋转检偏的方式设计并制作了一种单通道偏振光探测器,相较于多通道点源式检测方法能有降低成本和体积,减小装配对准难度的优点。
的关系可表示为:

若θ取0°、45°和90°进行光强采集得到偏振度和偏振角的解算公式:
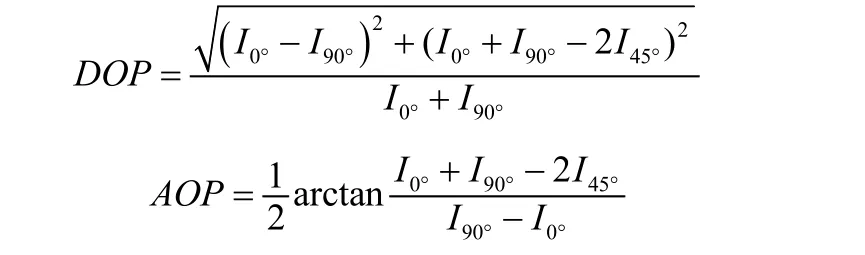
因此只需要利用电机转动线性偏振片来获得连续不同角度下光电转换器件检测到的光强值,就可以解算出偏振度和偏振角参数。
2 系统方案设计
2.1 系统总体方案设计
本文系统采用XILINX ZYNQ7020 Soc芯片作为系统采集控制芯片,以实现外部高速模拟信号和数字信号的采集,存储和机内解算。系统主要分为3部分,3PA1030外部模拟信号ADC采集模块、挂载在RS485总线上的高速编码电机、采用MP2236和XC6204-332MR芯片为主的电源模块,系统总体框图如图1所示。
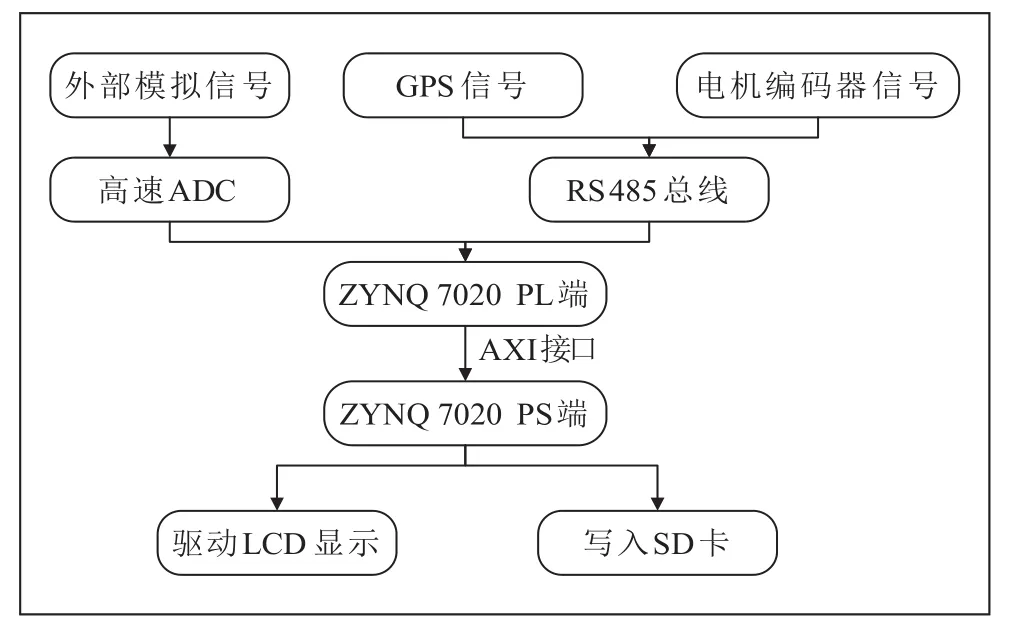
图1 系统总体框图
2.2 硬件电路模块
高速高精度AD采集离不开能提供稳定工作电压的电源模块,设计采用MP2236和XC6204-332MR芯片分别提供5V和3.3V电压。电源模块原理图如图2所示。
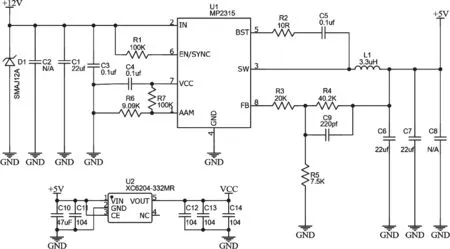
图2 电源模块电路原理图
MP2236是一款高频同步整流降压开关电源芯片,有600KHz的开关频率,散热良好的条件下能提供稳定6A的输出电流,适应3-18V宽幅输入电压。通过改变其中前馈电容和电感C9和L1分别为220pf和3.3uH得到模块最佳输出电压,其输出3A电流时纹波为24mV动态响应度为76mV。
特瑞仕XC6204-332MR是一款高速线性稳压器(LDO)能提供稳定3.3V的ADC供电电压,满足系统需要。
2.3 高速AD采集模块
为了对外部模拟信号输入进行高速高精度采集,系统选用瑞恩浦公司生产的3PA1030芯片,输出引脚为D0~D9,输出数据以二进制表示,可提供10bit采样精度。输入电压范围为0~2V,分辨率可达2mV,当输入电压超过量程后,OVR引脚会拉高。内置片内采样保持放大器(SHA),集成了基准电压源不需外接基准电压即可工作,其内部框图如图3所示。
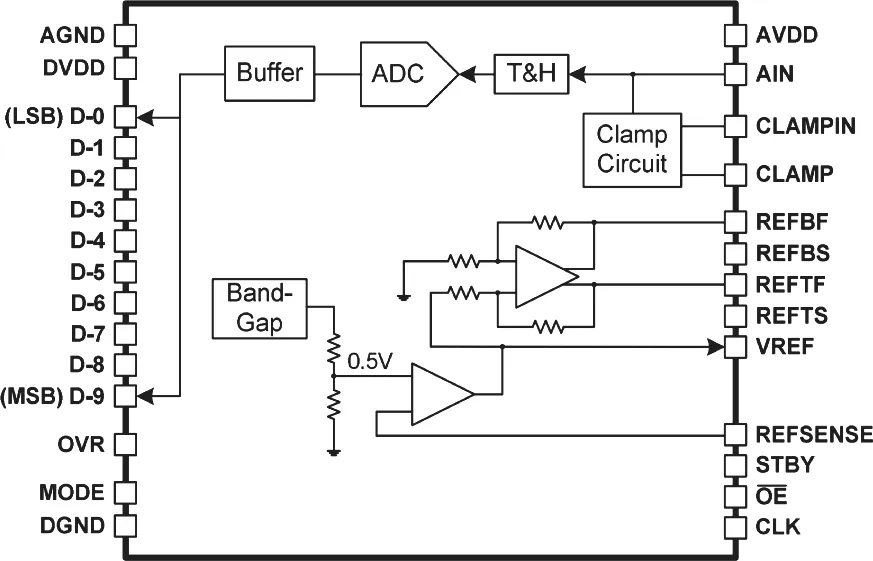
图3 3PA1030 内部框图

图4 3PA1030 时序图
根据3PA1030的时序图可知,芯片在时钟上升沿进行采样,通过ZYNQ7020的时钟提供50MHz的输入时钟信号,可以实现50MSPS的模数转换速率,AD采集模块电路原理图如图5所示。

图5 AD采集模块电路原理图
2.4 电机驱动和偏振模式检测装置结构
在设计实现偏振片高速运动时,需要得到高精度的偏振片角度信息。系统选用上海光毓机电公司生产的RMD-S系列编码电机,型号为DM4005,编码器采用差分信号传输,可以挂载在主控的RS485总线上,可提供0.01°的角度精度,满足系统需要。
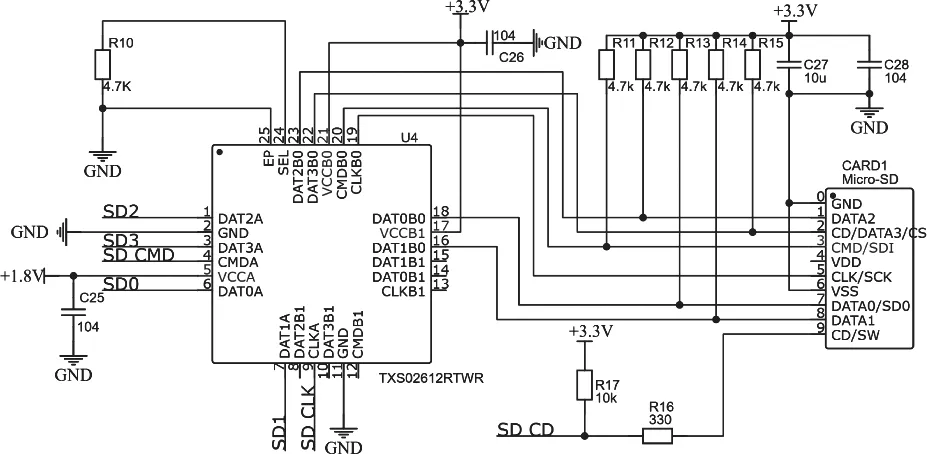
图6 SD存储模块电路原理图
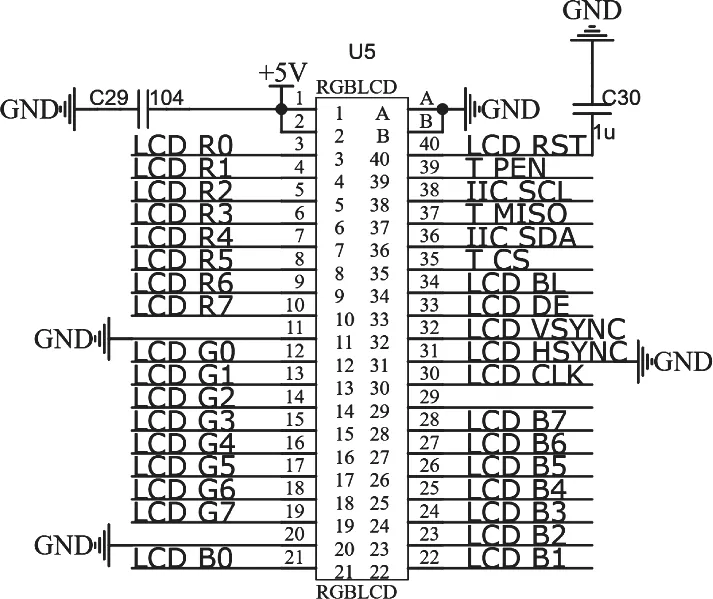
图7 LCD显示模块电路原理图
为保证电机和偏振片旋转时角速度同步并且旋转顺畅,根据渐开线齿轮参数方程,如式(5)、式(6)所示,制作了1:1大小的标准渐开线齿轮,如图8所示。
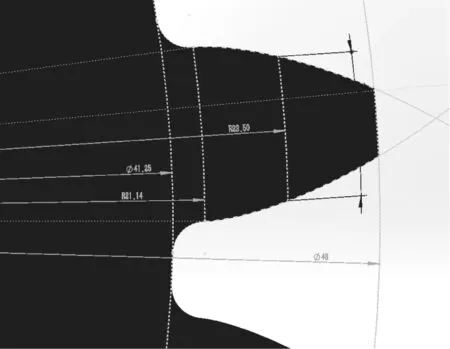
图8 标准渐开线齿轮示意图
其中rb为基圆半径。
装置实物图如图9所示,为了方便装置日后升级,在左侧预留了可装入偏振相机的安装孔位。并且设计了不同1/4螺丝孔安装底座,方便安装在无人车、无人机、三维精密转台等不同装载平台上。

图9 偏振模式检测装置
3 实验与结果
将装置装载精密三维转台上,设置转台分别按顺时针、逆时针方向做往复运动,在室内环境下采集人造偏振光源的偏振信息,设置装置电机旋转速度为360deg/s,ADC采样率为1MBPS,采集到的电机旋转一周时间内光电转换器件的电压值变化情况如图10所示,曲线趋势与理论趋势相符。装置机内解算得到转台正反转的角度数据如图11所示,通过与精密转台自身角度参数比较得到装置在室内试验中的误差曲线如图12所示。
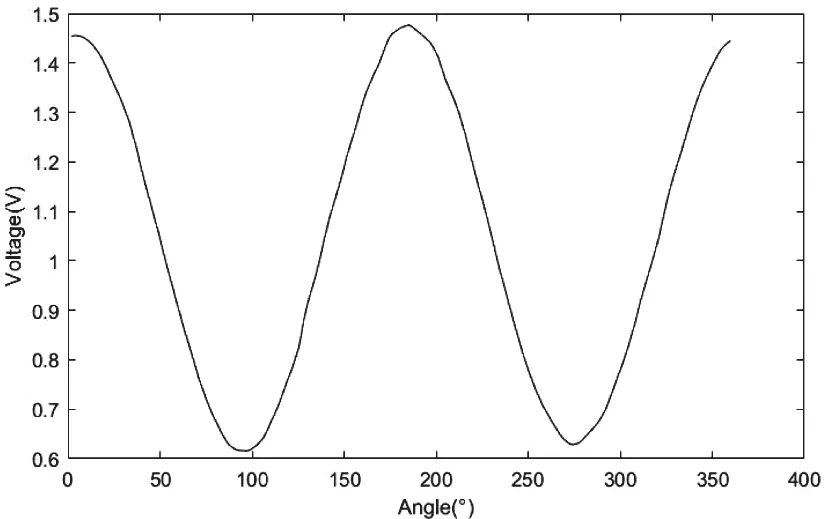
图10 一个周期采集的电压信号

图11 原地正反转解算航向角
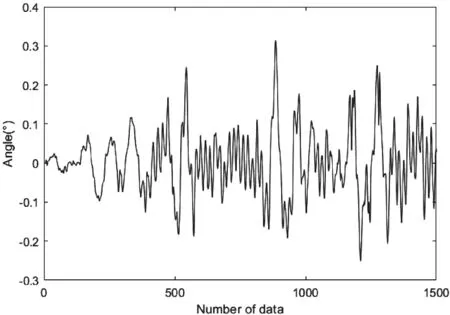
图12 航向角解算误差
将无人车放置在中北大学东区足球场外围路段,该路段周围建筑物、树木遮挡较少,适合进行室外采集实验。设置无人车按预定实验轨迹运动如图13所示,采集得到的航向角数据如图15所示。

图13 实验轨迹

图14 基于偏振光的组合导航无人车

图15 航向角解算数据
从图15和图16可以看出,室外实验时误差最大值出现在三次转弯处附近,最大动态误差为2.61°。该无人车采用独立悬挂,加之路面凹凸不平,致使转弯处会出现较剧烈的车身晃动。因此,在采集偏振信息时,应尽量保持采集装置水平稳定,最大限度避免因装置俯仰角和横滚角的变化引起的测量误差。
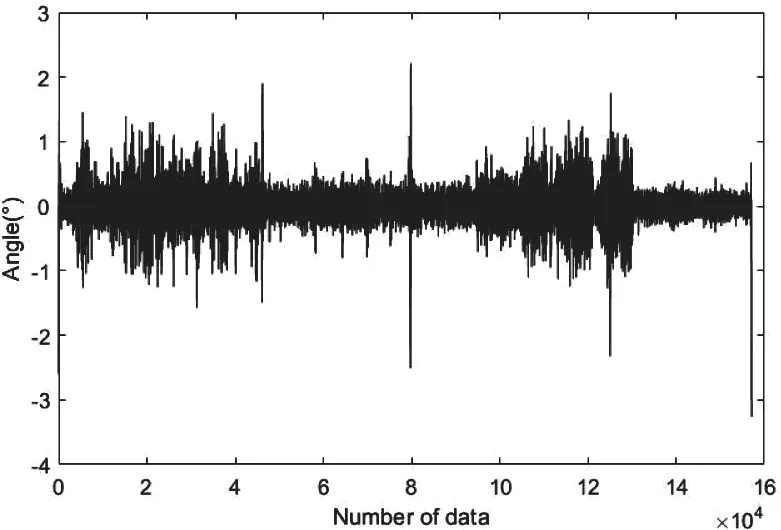
图16 航向角解算误差
4 结论
基于ZYNQ7020的高速偏振模式检测系统已经与传统阵列式和成像式偏振模式检测系统同时应用于无人车上,相较后两种检测方式,该系统有采样率高、体积小、便捷性强的优势,适合与其他导航方式共同为无人系统提供导航数据,为后续的系统升级和研究深入打下一定的基础。
猜你喜欢
聊城大学学报(自然科学版)(2022年4期)2022-08-22
成都信息工程大学学报(2022年2期)2022-06-14
通信技术(2020年4期)2020-04-25
科学咨询(2020年53期)2020-03-19
空间电子技术(2020年5期)2020-03-11
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
电子制作(2019年12期)2019-07-16
现代职业教育·中职中专(2018年11期)2018-06-11
光学仪器(2016年6期)2017-04-24
