
基于数字驱动器的大功率IGBT故障保护与诊断方法研究
2022-03-17 05:30厉孟李海峰
中国科技纵横 2022年2期
厉孟 李海峰
(海装驻北京地区第四军事代表室,北京 100036)
0.引言
对于一个完整的电力电子变流器,其保护功能应是非常完善的,一款性能优良的门极驱动器不仅可以提供足够的驱动功率使IGBT获得理想的开关特性,充分发挥出器件的潜力,而且能够快速的对各个故障进行检测保护并返回故障信息,全面保护半导体功率器件,使其在各种情形之下都不会受到损坏[1-3]。但在实际应用过程中,存在一定难度,因为现有的硬件电路无法分辨功率器件是处于正常工作状态还是发生真故障,假定将保护阈值或检测延时设定得太高,一旦出现真故障,门极驱动器不能快速关断功率器件,将导致器件损坏,并且某些情况由于故障原因无法定位,维修效率较低且存在安全隐患[4-6]。另一方面,驱动器需要提供全面有效的电源保护、短路保护、过压保护等,在信号采样处理、有源钳位、分级关断以及时序管理等方面的设计和实现存在一定难度[7]。
因此,本文提出一种基于数字驱动器的大功率IGBT故障保护与诊断方法,取代传统模拟式门极驱动器,提升控制器对半导体功率器件电气损坏、过温、老化以及其他失效的预警时效,采用编码方法提取故障数据,协助快速定位故障和分析诱因,进一步提升大功率电力电子变流器安全可靠性和智能化水平。
1.总体思路
电力电子变流器中大功率IGBT的保护操作主要包括电压故障的保护、电流故障的保护以及温度故障的保护,而这些故障对应的检测电路输出信号送入数字可编程芯片进行分析处理,根据不同的故障类型配置不同的保护操作,并将故障信号编码后发送至上位机系统。
图 1所示为数字化保护电路的基本实现思路,该策略针对不同类型的故障信号,设置不同的关断保护方式和保护动作的响应时间,当故障信号输入主控制芯片后,控制芯片会对故障类型进行判断。若为过载故障,则对故障信号的真伪进行甄别,经过故障确认时间后,故障状态仍存在,则对IGBT进行关断保护操作。过载故障时集电极电流较低,因此只需要正常关断即可。针对短路过电流故障保护时关断应力较大的问题,此策略选用软关断的方式来避免关断过压的二次伤害。
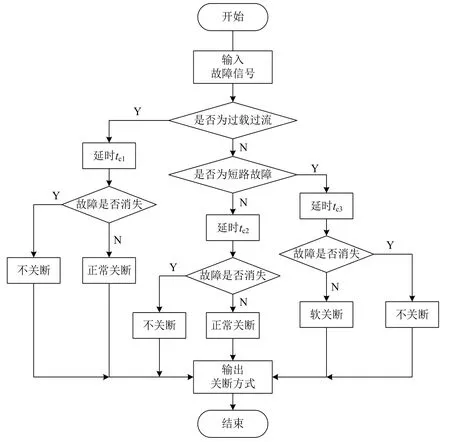
图1 数字化保护电路的基本实现方法
2.故障保护方法
2.1 欠压保护
对于IGBT桥臂,桥臂中的任一IGBT不能工作于欠压状态,较低的门极电压会引起误导通,也会导致IGBT通态压降增大,静态损耗增加,严重时使IGBT进入线性工作区。
因此,数字驱动器副边设置有欠压检测电路,同时监测副边正、负电源,当副边正电压或者负电压的绝对值低于阈值电压时,驱动电路判定发生了欠压故障,IGBT将在负门极电压的驱动下保持关断状态,并将故障信息发送给上位机。
2.2 短路保护
电流故障是导致IGBT失效的重要原因之一,尤其是在回路短路时,快速可靠地关断IGBT是十分必要的。由IGBT的饱和导通特性可知,当集电极电流从器件中流过时,会在集电极发射极产生一定的压降VCE-sat,与电流成正比,最能有效地反映过电流。如果负载电流IC增加至额定值的4倍以上,IGBT将退出饱和,即集—射极电压升高,最终达到直流母线电压VDC。利用这一特性,可以对过电流进行检测并实施保护。驱动器检测VCE进入退保和区的方法主要有2种,一种是通过阻容分压式检测,另一种是通过二极管检测,如图2所示。
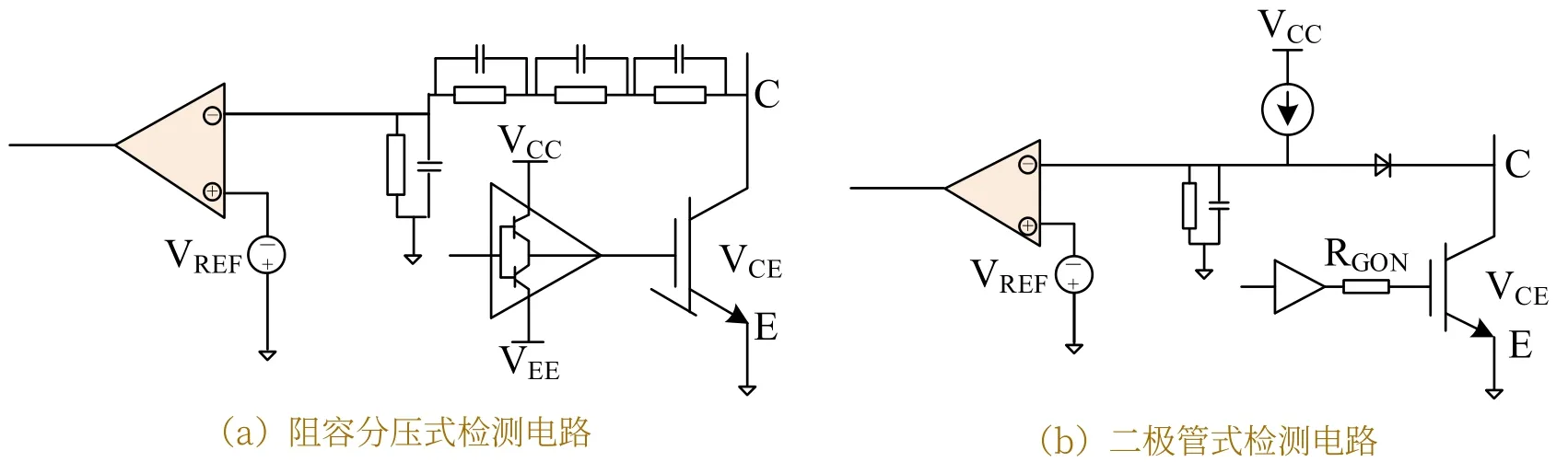
图2 VCE退保和检测电路
2.3 有源钳位
当出现电流过载或者短路时,由于di/dt很高且在换流通路存在杂散电感,会导致电压过冲,这将可能超过IGBT的击穿电压并损坏IGBT。一种保护IGBT免受高压过冲损坏的方法就是集—射极钳位,也称为有源钳位。
基本的有源钳位电路实现方法是在IGBT的集电极和门极之间用瞬态抑制二极管(TVS)建立一个反馈通道,当集电极-发射极尖峰电压超过一个预设门槛时,有源钳位电路将会启动使得IGBT部分地打开,从而令IGBT的集电极-发射极电压得到抑制,此时IGBT在线性区内工作,基本电路原理和动作波形如图3所示,主要由TVS管和快恢复二极管构成。
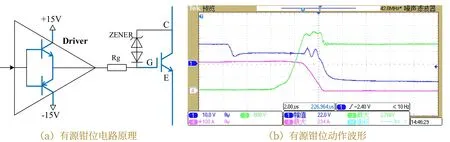
图3 驱动器有源钳位电路原理和动作波形
2.4 故障软关断
当驱动器检测到IGBT发生短路后不能立即关断IGBT,因为IGBT的集射极电压VCE会被迫迅速上升并超过母线电压,且极有可能会超过IGBT耐压值而导致IGBT损坏。
为了保护处于短路状态的IGBT模块,可通过慢降栅极电压的软关断策略。在检测到IGBT发生短路后,缓慢地减小IGBT的门极电压VGE,随着门极电压的缓慢减小,IGBT短路电流也会缓慢地减小,杂散电感上感应的电压会非常小。如果能将门极电压缓慢地减小到IGBT开通阈值电压之下,IGBT的电流会缓慢减小到0,IGBT完全关断。既能保证IGBT的短路时间不超过允许范围,又能减小IGBT短路电流和短路功耗,大大减小关断尖峰电压。
3.故障诊断方法
3.1 故障信息分类
当故障发生后,模拟式驱动器只能回报单一故障编码,该类回报信号通常为信号高电平代表正常,信号低电平代表故障。针对大功率IGBT应用场景,驱动器上报故障的原因比较多,该类故障回报方式难以定位故障原因,数字驱动的故障分类方式解决了该问题。相比模拟式驱动器,数字化驱动器具备丰富的可编程回报方式,可将驱动器已检测到的故障信息分类传输给上位机,以便操作人员准确判定被测试模块出现的故障,从而更快速地找到问题的解决办法。数字驱动器能区分4种故障类型,包括驱动栅极欠压故障、两段退饱和故障以及输入脉冲过窄故障,对4类故障做不同的编码处理,当故障发生时,驱动器应答相应编码,上位机可根据故障编码协议解码出当前故障类型。
3.2 欠压故障编码
驱动器实时监测栅极输出电压,当栅极输出电压跌落到10V以下,驱动器的回报光头由常亮状态变为常灭状态。IGBT处于导通状态时,欠压故障发生时,驱动器主动上传欠压故障,栅极电压恢复后,驱动器保持欠压故障直到IGBT变为关断状态。IGBT处于关断状态时,欠压故障发生时,驱动器主动上传欠压故障,当栅极电压恢复后,驱动器开始回报正常信息。
3.3 短路故障编码
IGBT开通后,驱动器检测IGBT的CE端电压超过参考电压,驱动器会上报过流故障信息。数字驱动器设定了两段退饱和故障,第一段退饱和故障发生后,驱动器回报3个1ms脉冲;第二段退饱和故障发生后,驱动器回报9个1ms脉冲。
3.4 窄脉冲故障编码
大功率IGBT开通和关断过程都需留有足够的时间,防止IGBT未完全开通后就进入关断过程,防止IGBT未完全关断后就进入开通过程。针对以上原则,驱动器增加了窄脉冲保护逻辑,如果2次开通脉冲间隔小于50ms时,驱动器会屏蔽第二个脉冲的输出,并向上位机上报窄脉冲故障。
4.结语
本文采用数字驱动器技术路径,取代传统模拟式门极驱动器,设计电路对欠压、短路等故障状态进行检测,并做出相应的保护动作。引入有源钳位、软关断等技术有效抑制短路或大电流关断时的电压尖峰问题,保证IGBT的安全,提出可编程回报方法,将故障信息分类传给上位机,以便操作人员快速定位故障和分析诱因,进一步提高了系统的可靠性和智能化水平。
猜你喜欢
电子与封装(2022年9期)2022-10-12
电气电子教学学报(2022年3期)2022-07-30
真空与低温(2022年2期)2022-03-30
长春师范大学学报(2019年2期)2019-02-27
制造技术与机床(2017年10期)2017-11-28
电测与仪表(2016年20期)2016-04-11
通信电源技术(2016年4期)2016-04-04
电源技术(2015年7期)2015-08-22
微特电机(2015年1期)2015-07-09
电测与仪表(2015年2期)2015-04-09
