基于最小二乘法模型的FAST 反射面形状调节问题研究
2022-03-16 10:31:14罗忠旭秦小华
科技创新与应用 2022年5期
罗忠旭,秦小华,陈 旭
(新疆农业大学,新疆 乌鲁木齐 830000)
1 问题重述
射电天文学对天体物理研究的多个领域做出了巨大贡献,引起越来越多天文学家的重视,世界各国都在努力突破毫米波射电望远镜的技术困难,以建造更大的高精度的天线和实现对较短波段的观测[1]。“中国天眼”是一架500 m 口径球面射电望远镜(Five-hundred-meter Aperture Spherical radio Telescope,缩写FAST),是目前世界上最大、最灵敏的单口径射电望远镜[2]。主动变形反射面是FAST 主要创新点之一,中国天文界公认整体索网支撑是作为大射电望远镜(FAST)主动反射面的最佳支撑结构[3]。其工作原理是通过下拉索与促动器的配合来完成基准球面到工作抛物面的转换,使被观测体发出的电磁波经反射后聚集在馈源舱处。工作抛物面随着物体的移动而不断变化,形成一个动态的“照明区域”,实现动态接收。天线对于射电望远镜来说,主要是把微弱的宇宙射电辐射信号收集起来,传送到接收机中去。收集到的信号越强烈,得到的讯息也就越丰富[4]。因此,调节成抛物面是主动反射面技术的关键。
根据主动反射面技术建立数学模型和算法解决如下问题。
问题:关于反映观测天体S 的方位角度α,仰角β 分别等于0°和90°,即被观测天体位于基准球面正上方时,确定理想抛物面。如图1 所示。
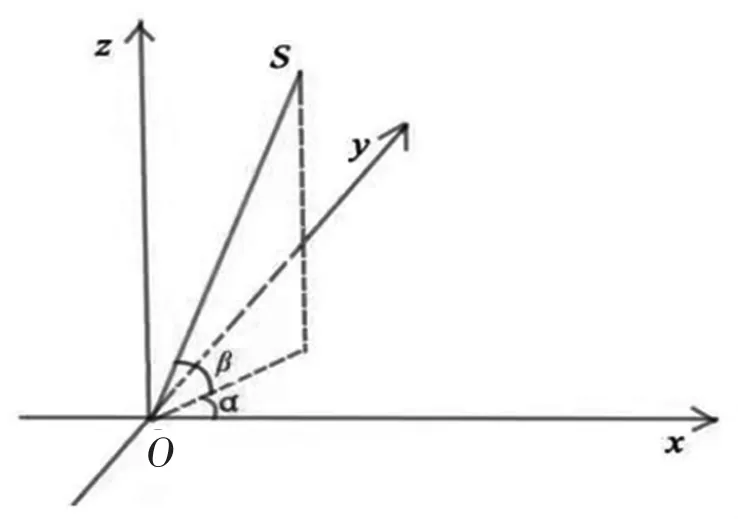
图1 天体S 方位角与仰角示意图
2 问题分析
对于问题,当方位角α、仰角β 分别等于0°和90°时,确定理想的抛物面,建立了以下3 种模型。模型1:理想抛物面的顶点与基准态球面的最低点重合;模型2:理想抛物面的顶点与基准态球面的最低点不重合时,但是理想抛物面的口径端点在基准态球面上;模型3,理想抛物面的一般情况。
3 模型假设
(1)基准态下,所有主索节点均位于基准球面上。
(2)认为反射面板是无孔的。
(3)电磁波信号及反射信号均视为直线传播。
(4)三角形反射面板面积相等且是均质的。
4 符号说明

表1 符号说明
5 模型的建立与求解
5.1 问题模型的建立与求解
模型1:
由图2 可知,F=0.466R=139.986 4 m,p=2F=279.6 m,R 为基准态球面的半径。

图2 模型1 示意图
可以确定一个理想抛物面,其母线方程,即zOx 坐标面的抛物线方程:
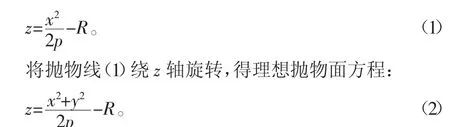
将数据代入方程(2),可得理想抛物面方程:

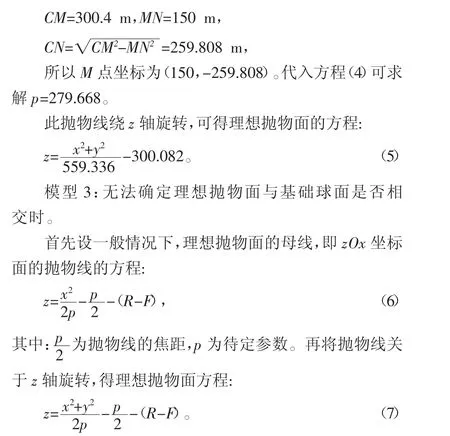
模型2:当理想抛物面的顶点与基准态球面的最低点不重合,但口径端点落在基准态球面上时,如图3 所示。

图3 模型2 示意图
设理想抛物面的母线,即zOx 坐标面的抛物线的方程:

由几何关系可求得该抛物线与基准态球面的一个交点,将这点坐标,和已知条件R、F 代入抛物线方程中,可求解p,从而求出此抛物线方程,将该抛物线绕z 轴旋转得理想抛物面。流程图如图4 所示。

图4 模型2 计算流程图
如图3 所示,在△CMN 中,

下面将利用“FAST 基准态的2 226 个主索节点空间位置坐标”,基于最小二乘法原理,通过建立和求解优化模型,计算得出方程(8)中的参数d1,从而确定最终的理想抛物面方程。
通过分析照明区域的口径长度范围,在照明范围内的主索节点满足x2+y2≤1502条件。通过Excel 设置条件语句,筛选出满足的706 个节点,即照明范围内共有706个主索节点。但是由于python 软件的技术限制,无法同时对706 个节点进行数据分析,通过系统抽样法,按照5∶1 比例,简化程序的运算量,筛选得到118 个最有代表性的节点,进行分析计算参数。
首先做如下假设:
设(xi,yi,zi)来表示初始状态第i 个主索节点坐标,其中i 表示“附件1”的从上往下第i 个节点。用(xi′,yi′,zi′)来表示(xi,yi,zi)对应的FAST 在工作状态的各个主索节点坐标。di为由点(xi,yi,zi)变化到点(xi′,yi′,zi′)时,对应的径向伸缩量,即基准态主索节点到最终的工作态主索节点之间的距离,且伸缩范围为-0.6~0.6 m。
现在,对基准态第i 个主索节点,其坐标为(xi,yi,zi),将其单位化为

所以(xi′,yi′,zi′)与(xi,yi,zi)的坐标关系:

再根据所筛选出来的118 个主索节点,定义118 个径向伸缩变量di(i=1,2,...118),基于最小二乘法原理,设目标方程:

当|di|≤0.6 时,在这个约束条件下,联立所有方程组,从而就得到了目标函数Drt,其自变量为di(经筛选存于“照明区域主索节点坐标.xlsx”,i 为1 到118)。然后,用python 求这个多元函数最小值,从而找到最优的工作抛物面。
5.2 模型的优点
模型的优点在于,问题中的模型3 里考虑了706 个变量的影响,把抛物面全部的点都考虑进去了,让求出的理想抛物面更加精确。基于这些节点坐标数据,建立了基于最小二乘法的优化模型,得到了相对于模型1 和模型2,更加精确的理想抛物面方程。
猜你喜欢
风流一代·经典文摘(2024年2期)2024-02-28 00:59:46
设备管理与维修(2023年18期)2023-10-27 09:36:50
起重运输机械(2022年10期)2022-06-11 07:32:30
天文研究与技术(2021年3期)2021-07-15 01:57:44
西部交通科技(2021年11期)2021-01-20 23:20:24
航天制造技术(2020年5期)2020-11-10 08:46:38
天文学报(2020年5期)2020-09-28 02:08:34
西安电子科技大学学报(2019年5期)2019-11-08 08:21:08
光学精密工程(2016年6期)2016-11-07 09:08:09
哈尔滨理工大学学报(2016年2期)2016-09-12 14:37:06