
基于GAMIT的北斗三代卫星定位数据精密处理及精度评估
2022-03-14 08:45郭若成胡俊杰
科技与创新 2022年5期
郭若成,胡俊杰
(武汉地震计量检定与测量工程研究院有限公司,湖北 武汉430071)
北斗卫星导航系统(BeiDou Navigation Satellite System,英文简写为BDS,以下简称“北斗系统”)是由中国政府建造的全天候、全天时免费为全球用户提供高精度定位、测速和授时服务系统。其于2012年底完成了北斗二号基本星座的组建,北斗二号基本星座采取5GEO+5IGSO+4MEO的形式,正式向亚太地区提供服务[1]。北斗三号采取3GEO+3IGSO+24MEO的星座构成,卫星与卫星之间具备通信能力,可以在没有地面站支持的情况下自主运行。北斗三号提供B1I、B1C、B2a、B2b和B3I五个公开服务信号。其中,B1I频段的中心频率为1 561.098 MHz,B1C频段的中心频率为1 575.420 MHz,B 2a频段的中心频率为1 176.450 MHz,B2b频段的中心频率为1 207.14 MHz,B3I频段的中心频率为1 268.520 MHz。
截至2020-04-18,中国境内能接收到BDS-3信号的IGS站只有URUM和WUH2,虽然LHAZ、JFNG提供了Rinex3版本的观测文件,但只接收了BDS-2信号。本文利用国内的URUM、WUH2及蒙古国境内的ULAB这3个IGS站10 d的Rinex3观测数据,利用GAMIT分别独立对GPS和BDS-3观测数据进行精密基线解算,分别对基线解算结果的NRMS值进行统计,并通过基线重复性进行精度分析。
GAMIT软件是国际上公认的高精度GNSS数据处理软件之一,它由美国麻省理工学院(MIT)和斯克里普斯海洋研究所(SIO)联合开发,主要用于高精度卫星定位和定轨[2],目前可以处理北斗定位数据。
1 数据处理模型
函数模型描述了观测值和待估参数之间的物理和几何关系。北斗采用测距码和载波2种方式测量卫星天线相位中心至接收机天线相位中心的距离。函数模型与定位方式相关,数据处理中一般采用间接平差函数模型。伪距测量和载波相位测量的观测方程分别反映了伪距、载波相位观测值和各未知参数的函数关系。
常用的求二次差方法也包含在接收机和卫星间求二次差、在接收机和历元间求二次差、在卫星和历元间求二次差3种[3],所得双差函数模型与求差顺序无关。北斗导航定位数据处理中应用最广泛的是在测站和卫星间求二次差,选择视场中高度角合适、可长期观测的卫星作为基准星,伪距和载波相位站间和星间双差观测方程如下:

站间和星间双差可消除卫星和接收机端的钟差参数和硬件延迟参数,且极大削弱了卫星星历误差、对流层改正和电离层延迟等空间相关误差,但多路径效应等未模型化误差难以被差分方式消除[4]。由于其计算量大大减少,该模型被广泛应用到科研和实际应用中,Gamit和Bernese等软件即采用了双差函数模型解算高精度测站坐标和轨道产品。
2 数据来源和处理策略
本文所利用的数据均来源于IGSMGEX项目的ULAB、URUM、WUH2这3个IGS基准站。3个测站均采用JAVAD接收机,天线均为JAVRINGANT_G5T,可接收BDS/GPS双模数据。观测数据的时间跨度为2020-04-09—2020-04-18,共计10 d。
利用GAMIT的双差模式对BDS-3和GPS观测数据进行基线处理,BDS-3数据基线解算中的广播星历和精密星历均来自于武汉大学IGS数据中心,GPS数据基线解算中的星历采用IGS发布的最终精密星历和广播星历。解算的主要参数如表1所示。
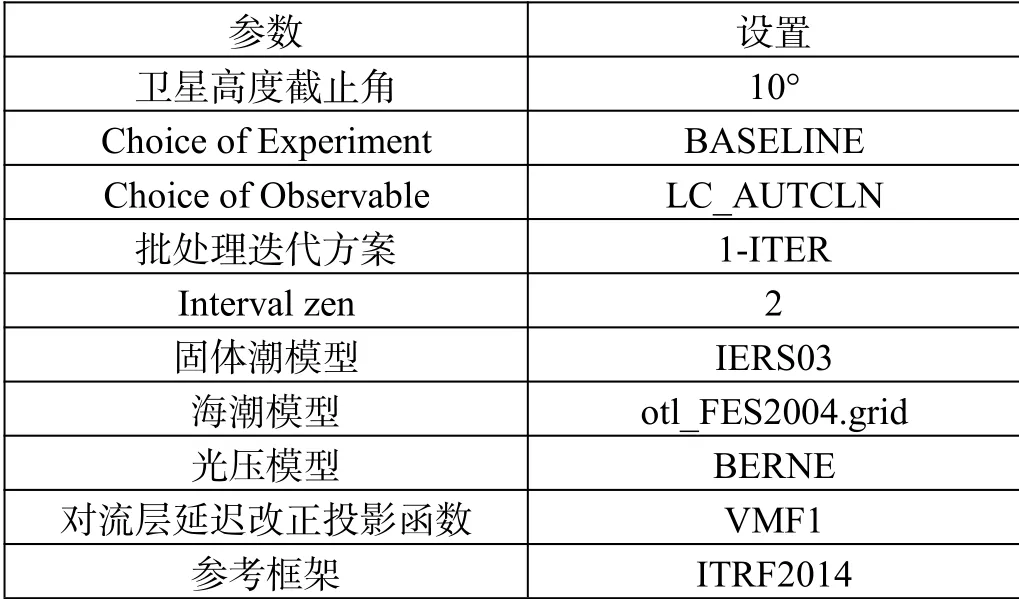
表1 GAMIT基线处理基本参数设置
3 基线解算精度分析
3.1 基线解算NRMS值
单天解标准化均方根NRMS(Normalized Root Mean Square)表示GAMIT解算的基线值偏离加权平均值的程度,是评价基线解算质量的一个重要指标,GAMIT采用全组合网解的方式进行基线向量解算,在基线处理完时已经进行了同步环闭合差分配,因此可将时段NRMS值作为同步环优劣检核的一个指标[5]。一般NRMS值小于0.25则认为是合理的,若NRMS值过大,则说明GAMIT基线解算时可能未完全修复周跳能。提取出基线解算结果O文件中的NRMS值做统计分析,如图1所示。从图1中可以看出,BDS基线单天解NRMS值为0.2左右,GPS基线单天解NRMS值为0.25左右,说明基线解算中同步环闭合差分配较好。
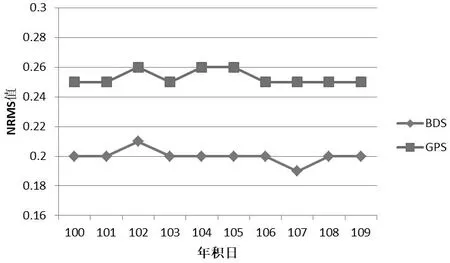
图1 基线解算NRMS值
3.2 Site Postfit RMS
Site Postfit RMS显示的是各个测站和卫星的均方根误差,一般最好的测站的RMS应该在3~5 mm,最差的测站RMS应该在7~9 mm。如果在10~15 mm之间,说明该测站有很大的噪声;如果RMS大于15 mm,说明该站的观测存在问题。这种问题可能是接收机的某种故障造成的,也有可能是因为测站附近多路径误差太大或者天气很恶劣。除此之外,如果测站的初始坐标有较大的误差或者观测时间太短以致引起收敛问题也会导致RMS值过大。
Site Postfit RMS如图2所示。从图2中可以看出,GPS解算的Site Postfit RMS稳定在4~6 mm,北斗解算的Site Postfit RMS波动较大,且均大于6 mm。
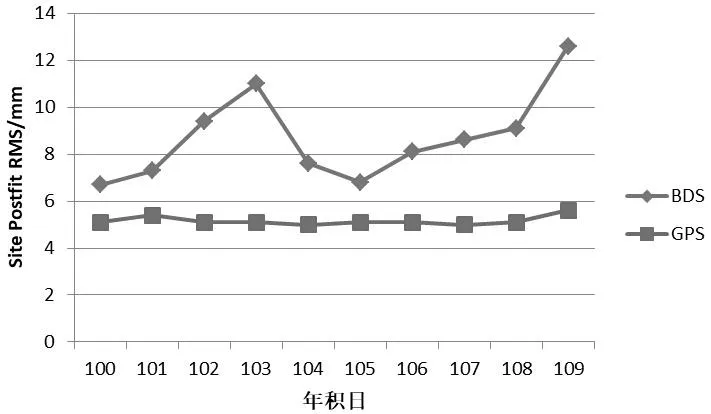
图2 Site Postfit RMS
3.3 BDS-3与GPS基线差值
BDS-3与GPS基线差值如图3所示。从图3中可知,连续10 d数据中,年积日103和109的解算结果中,BDS-3和GPS数据解算的基线值差值较大,最大达到了0.22 m,最小也有0.10 m,可能103和109这2天的BDS数据不好。除了103和109这2天,其他日期BDS-3和GPS解算的基线值差值均优于0.06 m。

图3 BDS-3与GPS基线差值
3.4 基线长度重复性
基线重复性反映的是基线解算的内符合精度,是衡量数据解算的重要指标之一[2]。GAMIT解算结果中并未直接给出基线重复性,该项指标可根据基线解算结果O文件中的基线长度进行统计分析。

式(2)中:σ为基线长度重复性;Li为i年积日计算基线长度;为多次计算的基线长度平均值;n为实际测量次数。
BDS-3和GPS的基线重复性结果如图4所示。从图4中可以看出,用BDS-3数据解算的基线长度重复性在25~65 mm。对于GPS数据解算基线长度重复性均在12 mm以下。

图4 基线重复性
3.5 BDS-3和GPS基线精度比较
BDS-3和GPS基线精度比较如表2所示。从表2中可以看出,最长边为URUM-WUH2,边长2 755 km;最短边为ULAB-URUM,边长1 568 km;BDS-3数据基线解算结果与GPS数据基线解算结果差值均优于10 cm,相对精度优于3.44×10-8。
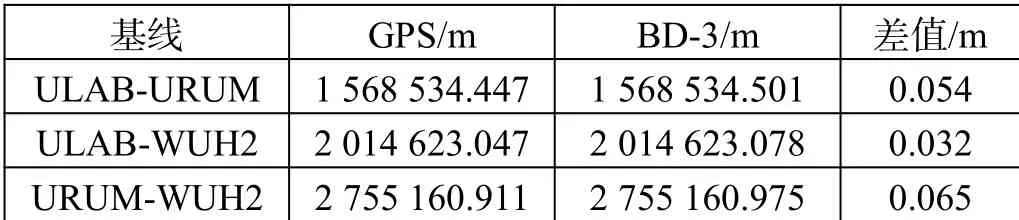
表2 BDS-3和GPS基线精度比较
4 结论
总体来说,BDS精度在不断提升,但从GAMIT解算结果看,精度和稳定性上要略差于GPS,其可能原因有:①误差改正模型不全面。GAMIT中针对BDS数据解算没有专门例如卫星轨道光压等误差改正模型,都是默认使用的GPS解算时的模型[2]。②缺少天线相位中心变化(PCV)模型。GAMIT针对BDS数据解算,接收机天线改正模型中只有相位中心偏差(PCO)改正,而没有天线相位中心变化(PCV)改正。王娜等[6]研究表明接收机天线PCV是高精度GNSS测量的一项重要的误差源。③BDS事后精密星历及种差精度不如GPS。刘东林等[7]认为GPS事后精密精度优于BDS的精密星历,GPS钟差精度也略高于BDS-3,明显高于BDS-2。
目前利用GAMIT进行BDS-3观测数据长基线解算,其基线解算的NRMS值都在0.25以内,基线解算结果较为理想,基线解算的相对精度可达10-8量级,已满足GNSS测量规范B级网的要求,在工程或科研中,利用GAMIT解算BDS数据,完全可以满足精度需要。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
理论与创新(2020年14期)2020-09-22
考试周刊(2016年94期)2016-12-12
城市建设理论研究(2014年25期)2014-09-24
祖国(2014年6期)2014-08-21
