
自主智能制造:社会—信息—物理交互、参考体系架构与运作机制
2022-03-11 06:46姚锡凡黄岩松麦海锋杨尔辅于洪年
计算机集成制造系统 2022年2期
姚锡凡,黄 宇,黄岩松,麦海锋,杨尔辅,于洪年
(1.华南理工大学 机械与汽车工程学院,广东 广州 510640;2.思克莱德大学 设计制造与工程管理系,英国 格拉斯哥 G1 1XJ;3.爱丁堡龙比亚大学 工学与建筑环境学院,英国 爱丁堡 EH10 5DT)
0 引言
智能制造诞生于工业3.0时代,成长于工业4.0时代,随着第一代信息通信技术(Information and Communication Technology, ICT)/人工智能(Artificial Intelligence, AI)技术的出现和发展,特别是信息物理系统(Cyber-Physical System, CPS)、大数据智能、分布式智能、自主智能、人机增强智能的应用深入,不断走向自主[1]。自主智能制造意味着生产线上鲜有操作员工乃至无操作员工,即所谓的“无人工厂”或“黑灯工厂”。在未来智能制造中,人将起到何种作用,这是人们普遍关注且必须面对的基本问题。
实际上,即使是自主CPS,仍需要考虑人的因素[2]。传统上,人们主要从物理空间人机交互的视角来探讨人在系统中的角色和作用,忽视了从系统科学视角系统深入地探讨智能制造系统的自主性问题,特别是在以智慧制造为代表的社会信息物理生产系统 (Social-Cyber-Physical-Production System, SCPPS)[3]出现的同时,所诞生的面向工业4.0未来社会可持续发展的新型操作者[4],更凸显了这种系统性探索的必要性。我国发布的《新一代人工智能发展规划》则将自主智能系统作为主攻方向之一。
本文从社会信息物理系统(Social CPS, SCPS)的角度出发,探讨新一代智能制造系统的自主性、人机物交互、参考体系架构及其运作机制和示例:一方面在社会—信息—物理融合空间探讨多维度人机交互及其融合问题,另一方面通过“自上而下”的知识驱动和“自下而上”的大数据驱动相结合的混合人工智能方法探讨自主智能制造运作机制。为此,本文以人们熟知的自动驾驶案例为先导,对比分析人机物协同的智能制造系统在自主性层次上的问题,说明机器/系统如何从手工操作转变为自主运行,然后探讨自主智能制造系统中的人机物交互以及人在其中所担当的角色和作用,接着阐述实现跨层、跨域的人机物协同自主智能制造参考体系架构和运作机制,最后给出混合人工智能方法驱动的人机物协同自主智能制造应用示例。
1 从人机交互到自主智能
汽车驾驶是人机交互的典型例子,通常需要操作者(驾驶员)对汽车进行控制,而自动驾驶的最终目标是实现无人驾驶。美国国家公路交通安全管理局(National Highway Traffic Safety Administration, NHTSA)将自动驾驶分为5个等级[5];德国联邦公路研究所也提出了类似的自动驾驶等级[6];美国汽车工程师学会(Society of Automotive Engineers, SAE)发布了类似于NHTSA的自动驾驶分级,并进一步细化为6个级别[7]。
现有的自动驾驶车辆大多处于L2或L3级别,这种级别下需要驾驶员对车辆进行操作或对周边环境进行观察,可见人依然是驾驶过程中不可或缺的角色。然而无人自主驾驶无疑是未来交通出行的必然方向,其实现只是时间问题[8],无人自主智能工厂的发展也是如此[9]。
自动驾驶是生活中常见的人机交互案例,也是新一代ICT/AI应用成果的重要体现,终将对生活方式乃至生产方式产生重大影响(即使不开车,也要坐车),其广泛应用于企业生产的物料自主运输,由自动驾驶案例可以窥见智能制造未来的发展趋势。实际上,与SAE自动驾驶6个级别类似[10],德国也将工业4.0(智能制造)的自主性分为6个级别[11],描述了从手工生产到全面自主生产的6种情形。工业4.0自主性与SAE自动驾驶的对比如表1所示。
从完全人工操作(L0)到完全自主(L5)的自动驾驶发展过程的实质,是人对车辆干预不断减少而车辆自主性不断上升的过程,最终车辆接管人实现自主行驶。人机界面(Human Machine Interface, HMI) 是其中重要的交互载体,并随新技术应用和自动驾驶需求发生重大改变,从最初为驾驶员提供车辆状态信息变得更加多样化[12],尤其是在高级别自动驾驶时需要为车内乘客和周围道路使用者提供信息交互支持。
直接沿用自动驾驶等级划分自主智能制造,虽然利用现有的人机交互研究成果,但是无法满足虚实融合为主要特性的新一代智能系统人机交互需求。综观人机交互发展历程,其外延不断拓展,从最初“人—机/Human-Machine/Robot/Computer” 的单机交互发展到人—系统(Human-System, HS)乃至于人—CPS(Human-CPS,H-CPS)的交互[13],其内涵从物理空间的人机交互(如图1a)发展到虚拟空间和虚实融合的多形态交互(如图1b~图1g)[3]。


如果将智能制造分为低级(L0~ L2)和高级(L3~ L5)两个阶段,则高级阶段智能制造即为自主智能制造(简称自主制造),其重要特征在于实现了环境监控并逐渐将人从物理交互中解放出来,类似于自动驾驶高级阶段(L3~ L5)实现了行车环境的系统监控并将人从物理操作中解放(或基本解放)出来。很明显,对于基于CPS/SCPS的新一代智能制造系统自主性问题的研究,不能局限于物理系统层次,还需要在信息物理空间乃至社会信息物理空间进行系统性研究。
2 自主智能制造系统的人机物交互
以物联网(Internet of Things,IoT)、云计算、CPS、大数据和深度学习为代表的新一代ICT/AI对制造业产生了革命性影响,形成了新一代智能制造模式——信息物理生产系统(Cyber-Physical-Production System, CPPS)乃至SCPPS[14-16],或称为人— 信息— 物理系统(H-CPS)[13]。
新一轮科技与产业革命对人机交互的影响超过以往任何时期。如图2下半部分所示[17],工业1.0时期,工人手工操作机器,出现操作员1.0(O1.0);在工业2.0后期和工业3.0初期,操作员2.0(O2.0)使用计算机辅助技术和数控机床进行工作;到了工业3.0后期,电子和IT技术使生产流程进一步自动化,操作员3.0(O3.0)与机器/机器人/计算机协同工作;如今发展到工业4.0,操作员4.0(O4.0)在H-CPS的帮助下工作。
伴随工业4.0而诞生的多种形态操作员4.0 (如图3[18]),反映了人类的体力和脑力工作不断被机器替代,也意味着生产线上直接从事作业加工的操作工(蓝领)减少,操作工从“环内”转移到“环上”乃至“环外”,变为监管者/评估者/协调者/程序员/虚拟操作员/数据分析员/规划者/决策者/计划员/创客/体验者(白领),即使此时仍然存在一线作业工人,也在可穿戴设备、平板电脑和协作机器人等“机”的协助下成为超强操作员/增强操作员/智慧操作员/协作操作员。这种情况大幅降低了操作员的劳动强度,并使整个产品的生产过程得到了更好的监督、分析与决策策略上的优化。例如,健康操作员可携带健康监管器等可穿戴器具收集个人健康数据并与他人健康信息交互,对得到的数据进行分析,用于优化策略或预测潜在的问题,进而提高生产率;社交操作员可以通过实时移动通讯设备连接其他智能操作员、监管智能工厂的资源、使用企业积累的知识来进行管理与创新。实际上,这种作业人员在“环”的位置上的转移,与人类历史上劳动力从第一产业转移到第二产业和第三产业颇为相似。

下面以SCPPS的典型代表——智慧制造(wisdom manufacturing)[19-20]为例,探讨其中的人机物交互问题。智慧制造将制造系统视为由社会系统、信息系统和物理系统3个相互联系、相互作用的子系统构成的一个人机物协同SCPPS,其将未来互联网四大支柱技术(物联网、内容知识网(Internet of Contents & Knowledge, IoCK)、务联网(Internet of Services, IoS)和人际网(Internet of People, IoP))与制造技术深度融合于一体,以数据为纽带联通社会系统、信息系统和物理系统,形成一种人机物协同的智能制造新模式[21]。这种人机物协同的智慧制造是人(社会系统(Social System,SS))、(计算)机(广义的信息系统(Cyber System,CS))、物(机器和其他资源构成的物理系统(Physical System,PS))三者的有机融合,当机器设备(物)在物联网边缘计算和人工智能作用下形成具备自主性的智能体时,人—机—物交互是成为系统协同的关键,其各元素之间的交互如图4所示,此时人既可作为社会人,又可作为物理人在生产车间进行作业(随着智能制造的发展,作为操作工的人越来越少,甚至出现无人车间,人更多地从事设计等创新性工作),还可作为虚拟人存在于系统中。
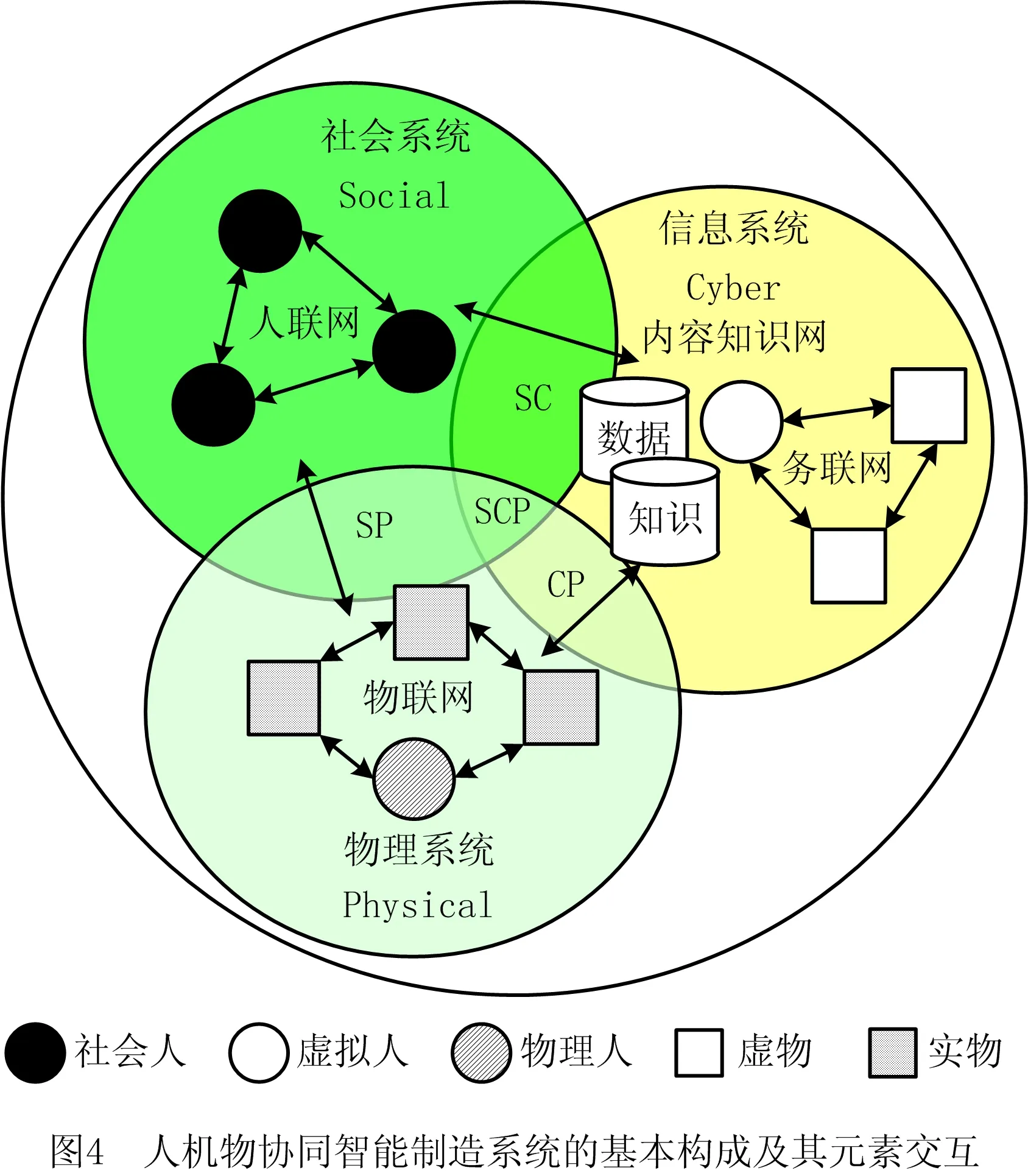
智慧制造/SCPPS中的人机物交互包括社会系统、物理系统、信息系统 3个子系统(空间)内部元素之间的交互以及子系统之间元素的交互,其中:社会系统包括基于人联网(人际网)的人—人交互与协同集成;物理系统包括基于物联网的机(器)—机(器)、物(料)—物(品)/机、人—机/物的交互与协同;信息系统包括基于务联网的服务—服务的交互与协同,以及基于内容知识网的数据/信息/知识在系统中的传递和耦合,尤其是子系统(空间)之间的人—机/H-CS、人—物/H-PS、机—物/C-PS、人机物/H-CPS的交互与协同。
需要指出的是,所谓“人机物”,既可以指物理空间里的人-机(器)-物(料),又可以指整个智慧制造系统的人(社会系统)-信息系统(计算机及其网络系统)-物理系统,即H-CPS或SCPPS,因此需要根据具体语境(场景)确定其含义。例如,“机”在物理空间指机器(如机床、机器人),在整个系统空间又指信息系统;“物”在物理空间指物料或机器,在整个系统中又指物理系统;“人”实际上可以同时位于智能制造空间的装备执行层(物理层)、制造执行层和决策层[22],即位于智慧制造(SCPPS)中对应的物理空间、信息空间和社会空间[3,23]。
3 自主智能制造系统中人的角色
如图5所示,工业4.0下的智能制造系统实际上存在3条回路,即机器设备构成的物理系统回路、监控物理系统的虚拟回路和监管CPPS的组织回路,分别对应智慧制造洋葱模型的物理系统、信息系统和社会系统。这里所说的“人在回路里(Human in the Loop,HiL)”指物理系统里是否有人作业,若无人即为所谓的“无人工厂”。
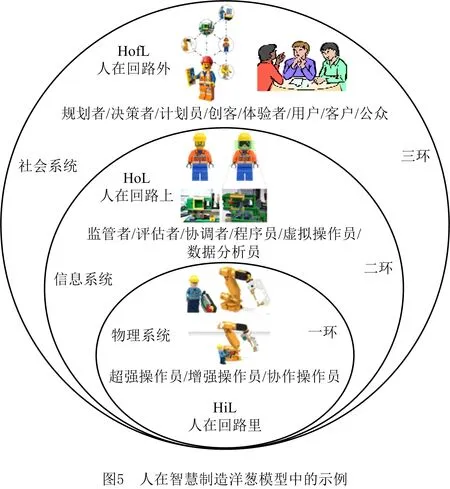
HiL[24]当初指一个控制系统是否包括执行动作的人,若有则称人在控制回路里;人在回路上 (Human(Man) on the loop,HoL)[25]指人间接监管系统而不是直接操控系统;与HoL类似的另一个概念是人在网格 (Human in the Mesh,HiM)[26-27]。由于新型操作者4.0的诞生, 无人工厂虽然不存在HiL,但是存在HoL/HiM(即在信息系统里)和人在回路外(Human out of the Loop,HofL)(即在社会系统里)的情形。
实际上,人们已经意识到自主系统仍然不能缺少人的参与,需要以人为中心来设计CPP/CPPS/智能制造[28-31]。综观CPS/CPPS与人的融合研究[2,32-35],绝大多数局限于HiL-CPS问题,少数涉及HoL-CPS问题[36],几乎没有涉及HofL-CPS问题,更加缺少三者(HiL/HoL/HofL)与CPS的集成研究,然而伴随着新一轮工业革命,诞生了操作员4.0[17-18]和长尾生产需求[16],这种集成又必不可少。本研究将HiL,HoL,HofL分别融入SCPPS (智慧制造)洋葱模型的物理、信息和社会子系统中,形成一个有机的整体,更有利于理解和把握三者之间的关系并认识人在自主智能制造系统中的作用和角色。
4 人机物协同自主智能制造参考体系架构
借鉴德国工业4.0参考体系架构模型(Reference Architecture Model Industrie 4.0, RAMI 4.0)[37],本文在(主动)智慧制造集成框架[38-39]基础上,提出如图6所示的自主智能制造参考体系架构模型(Reference Architecture Model for Autonomous Smart Manufacturing, RAM4ASM),其中:系统层次从空间跨度维度刻画,包括工件/产品、设备、单元、产线、车间、企业、互联世界;时间跨度从生命周期维度刻画,包括设计、生产、使用/维护和回收等阶段;功能层次(类别)维度代表系统的核心功能,包括资产(物理资源)、感控、数据(信息)处理、功能、业务、用户(社群)6个层次。业务功能代表产品全生命周期的所有业务功能,包括产品设计、仿真分析、车间状态感知、数据处理、资源配置、机器学习、故障诊断与预测、设备控制、生产过程监控等。
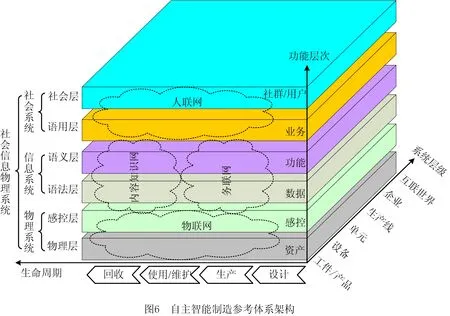
所提出的RAM4ASM功能层次与组织符号学的物理、经验、语法、语义、语用、社会6个层次相对应[38]、一脉相承,并支持现代集成制造从工业3.0下的计算机集成走向工业4.0下人机物协同的全面集成需求[1]。工业4.0集成包括横向、纵向、端到端3项集成,其中:横向集成在于实现企业间的集成,使互联的企业在产品生命周期的生态系统支持下创造价值链;纵向集成旨在实现企业内部不同层次之间的信息集成;端到端集成则在前两者(纵向和横向)集成的基础上,通过产品生命周期理念来弥合产品设计、制造与客户之间的鸿沟[40]。纵横集成又称为跨层、跨域集成[9]。由此可见,新一代智能制造中的人机物协同是多维度和多层次的[41]。
在物理系统、信息系统和社会系统日趋融合的复杂大环境下,要实现如此复杂的多层次、多维度人机物协同自主智能制造的设计、管理与运行,无疑需要一个虚实融合的人机物协同SCPS体系架构,而如图6所示的“四网”融合的RAM4ASM正是这样的参考体系架构,其实现了从物理层到社会层的跨层(纵向)集成、从单个企业到互联世界多个企业的跨域(横向)集成,以及面向产品生命周期价值链的设计、制造和使用服务的端到端集成。
5 自主智能制造运作机制
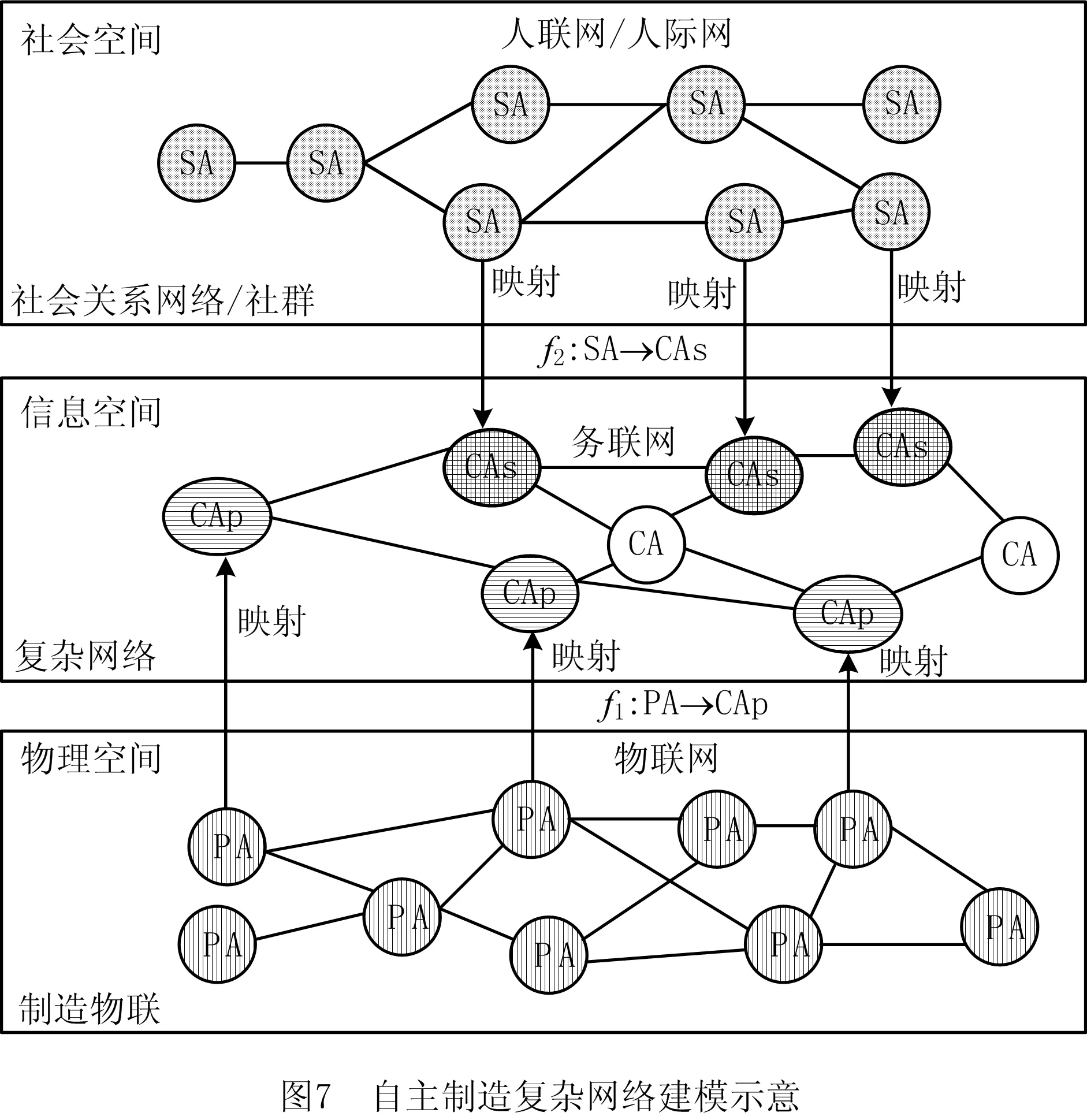
如前所述,在虚实融合的智慧制造系统/SCPPS中,人存在于物理空间、信息空间和社会空间。如果将物理空间的人/机器/工件等物体(称为PA)和社会空间的人(称为SA)分别映射为相应的虚拟智能体CAp(cyber Agent for physical things)和CAs(cyber Agent for social beings),则有f1: PA→CAp和f2: SA→CAs,进一步结合虚拟空间的赛博原住民——赛博智能体CA(cyber Agent),再通过务联网连接所需的Cap,CAs,CA节点,建立自主(智慧)制造复杂网络模型,如图7所示。

如图8所示的RAM4ASM功能层次体系架构,与图4~图6一样包括物理、信息和社会3个子系统,操作员4.0同样存在于3个子系统中,分别对应HiL(物理空间)、HoL(信息空间)和HofL(社会空间)。底部的物理系统通过物联网实现物理制造资源集成、感知以及物—物和人—物互联,形成包括人在内的物理回路;中间的信息系统,通过内容知识网和务联网实现虚拟的人机物集成,包括数据/信息/知识的处理及其之间的相互转化,以及虚拟服务化资源管理调度和物理系统监控等;顶层的社会系统(社群)除了社交操作员等O4.0外,还包括企业经营决策者/用户/客户/公众等利益相关者。企业经营者根据市场动态、经营策略和企业文化等各种因素确定制造系统整体的经营目标和功能定位,增强企业文化建设以及与上下游企业和用户的联动等。
需要指出的是,现实生产场景不同于特定规则限定的自动驾驶场景,由于当今社会对产品的需求具有多层次和多样性特点,生产场景变得多样化和复杂化,简单的生产场景无人已经实现自主工厂,而复杂生产场景仍需要人的现场参与。特别是随着工业4.0的发展,现场作业人数虽然大幅度减少,但却又诞生了以前不存在的如O4.0的新兴操作人员。
图8所示的RAM4ASM,既包容“自上而下”的基于符号学的智慧制造[38],又包容“自下而上”大数据驱动的主动(智慧)制造[39],因此其既支持通过社会化(socialization)、外化(externalization)、融合(combination)和内化(internalization)实现人的隐性知识在社区群体之间转化[19],又支持大数据到知识图谱的转化和大数据深度学习,为知识(模型)驱动和数据驱动融于一体提供框架支持,进而将知识驱动和数据驱动理念有机融合在一起。一方面可利用“自下而上”的数据驱动方法,使以大数据深度学习为代表的新一代人工智能在实际生产中得以落地;另一方面,利用“自上而下”的知识驱动方法,使企业在制造领域前期积累的先验知识、经验和模型(如智能体、数字孪生模型和知识图谱)发挥作用,弥补单一数据驱动方法对数据需求量大和难以利用先验知识(模型)的缺点。
实际上,数据驱动和知识驱动是实现AI智能系统的两大主流方法,尽管历史上经历过此长彼消,但是两者本质上具有互补性。目前兴起的新一代人工智能热潮源于深度学习,而深度学习源于人工神经网络的研究,以大数据深度学习为代表的数据驱动方法已在机器视觉、自然语言处理等领域获得巨大进展和落地应用,特别是在非结构化大数据处理和关联计算方面表现突出,但缺乏逻辑推理和因果关系的表达能力,存在可解释性差等问题,而以符号表示和逻辑推理为代表的知识驱动方法则具有逻辑推理解释和对因果关系的表达能力,存在知识获得困难和知识边界易于突破等瓶颈问题,难以适应非结构数据为主的大数据时代需求。庆幸的是,随着大数据兴起的知识图谱为知识获取和人工智能可解释问题提供了一条新途径。因此,如何将符号化知识与数据驱动的人工智能方法有机融合是当前人工智能的重大问题,特别对需要特定领域知识支持的智能制造更是如此。
诚然,数据与知识融合驱动的形式多样复杂。李峰等[42]针对电力系统应用需求,提出并行、串行、引导和反馈4种数据与知识联合驱动模式;蒲志强等[43]将群体智能决策协同分为架构级和算法级,算法级协同又包括神经网络树、遗传模糊树、分层强化学习等层次化协同方法,以及知识增强的数据驱动、数据调优的知识驱动、知识与数据的互补结合等组件化协同方法。
本文针对图7所示的多智能体构成复杂网络需求,将加工作业流程用一个三元组图表示为G=(V,E,u),其中:V={vi}i=1:Nv为机器节点集合,vi为加工时间等机器属性,Nv为节点数目;E={ek,rk,sk}k=1:Ne为节点连边的集合,ek为工件运输时间/距离等移动机器人属性,Ne为边或弧的数目,rk为接收节点,sk为发送节点;u为最大完工时间等整体属性。用图神经网络深度强化学习求解G=(V,E,u)[44],如图9所示。
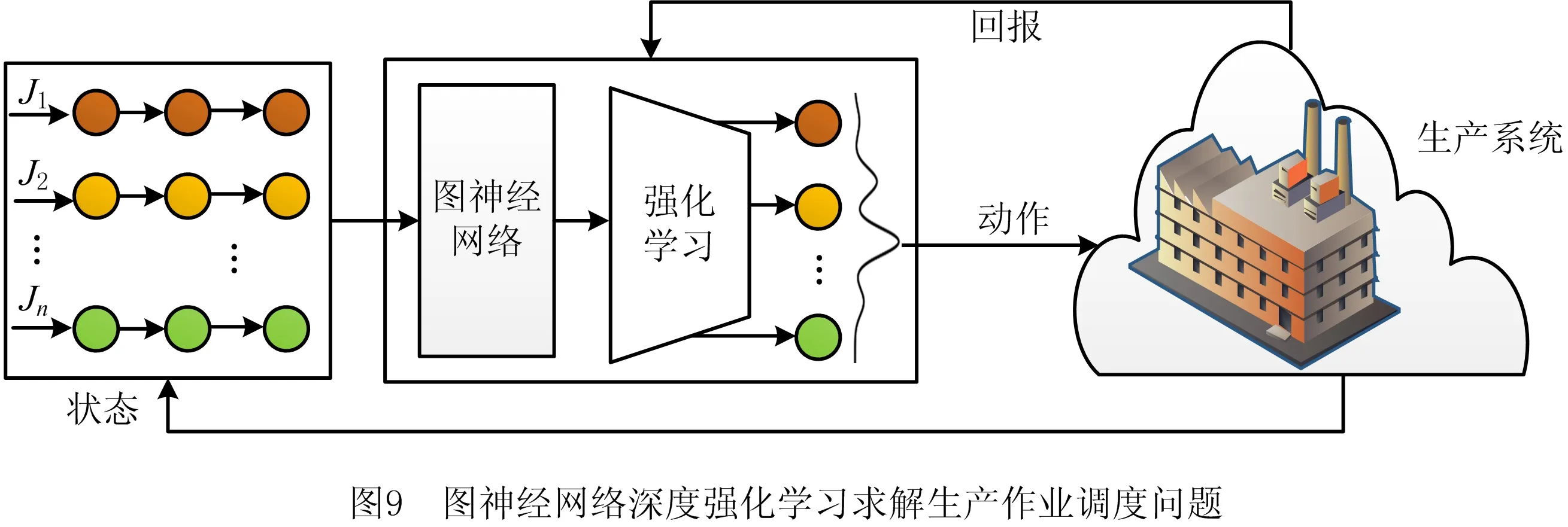
图9所示的人工智能方法融合应用求解,实质上将符号主义(知识驱动方法)、联结主义(数据驱动方法)和行为主义(强化学习方法)3种人工智能学派(方法)有机融合在一起,进而实现融入实体知识描述的复杂网络深度强化学习,使得复杂网络(类似于知识图谱)先验知识能够成为深度学习的输入并作为深度学习优化目标的约束,形成一种知识引导、数据驱动和行为探索相结合的人工智能求解方法。
6 示例
下面以按订单生产模式为例进行说明:
(1)生产企业通过社会化网络大数据分析向需求用户推送产品服务和知识,一旦接到用户需求订单,就邀请用户参与产品设计和生产计划的制订,在人联网和CPS支持下可实现所定制产品的模拟仿真乃至虚拟制造。
(2)信息系统接收社会系统下达的生产计划,根据车间生产信息和设备状态信息生成调度方案,并分发到物理系统进行加工作业。
(3)物理系统执行信息系统发来的控制指令,完成具体的作业加工任务,同时将车间的工作状态反馈给信息系统。
(4)信息系统分析来自物理生产系统的状态数据/信息,监控加工作业是否按预定的作业调度方案进行,判断是否需要对调度方案进行动态调整。
(5)社会系统接收来自车间的状态信息或信息系统动态调度结果及其他信息,判断生产是否按计划进行,如果发生用户订单更改等突发事件,则需重新制定生产计划。
从上述订单实现流程可知,顶层社会系统主要通过人联网,利用人类的经验、知识和群体智慧解决经营决策、生产计划、创意与产品设计、问题解决方案等;底层物理系统主要通过物联网,利用传感数据完成具体的作业加工任务;中间的信息系统处于顶层社会系统的人类知识(模型)和底层物理系统感知数据的交汇之处,其利用物联网感知数据实现对生产过程的监控,并从数据挖掘出有意义的信息/知识/事件推送到社会系统,为企业的业务决策提供支持。
本质上来说,产品设计开发及其生产流程制订由人完成,是人类在社会实践与生产实践中的群体智慧结晶;底层物理生产系统仅执行人类意志(命令),只因融合了当今新一代信息/智能技术而具备了自主智能执行能力;中间的信息系统起关键作用,即承上启下地融合人类的经验知识(包括符号推理智能)和大数据智能(计算智能)。
以边缘计算、智能体、云计算、大数据和深度学习为代表的新一代ICT/AI,有力地促进了底层物理生产系统的自主性和信息系统的大数据智能分析能力[45]。例如,大数据深度感知事件驱动的车间作业调度方法[46],能够根据加工过程的实时数据和历史数据预测刀具磨损程度,生成刀具剩余寿命预测事件驱动的主动调度方案[47],在避免发生刀具磨损事故并确保系统正常运作的同时提高了生产率。虽然这种大数据驱动的主动制造较好地利用了大数据的深层价值,但是仍然不能有效利用人类积累的经验知识(包括机理模型和数字孪生模型等),因此需要将数据驱动与知识驱动加以融合。
下面以若干个企业(车间)组成的齿轮制造为具体案例进行说明。企业6为齿轮制造核心成员,拥有4机床,能完成插齿、滚齿和磨齿等加工任务,但是需要将其他加工任务外包给其他企业,原材料供应商和其他加工企业生产能力如表2所示。齿轮制造(1)根据《齿轮制造工艺手册》编委会于2017年出版的《齿轮制造工艺手册(第2版)》,渗碳淬火大齿轮的加工工艺流程包括原材料处理(锻造)、车削加工(分5步对齿轮的齿顶圆、内孔、左右端面和环槽进行粗车和精车加工,以保证相应的径向跳动误差、端面跳动误差和表面粗糙度的要求)、孔和键槽加工(通过划、钻、镗完成环槽孔加工,通过划、插、钳完成内孔键槽加工)、齿加工(粗滚齿、齿形端面及沿齿长棱边倒角、半精滚齿、磨齿和齿侧倒角)、热处理及表面处理(正火、渗碳、淬火和喷丸),以及一些必要的检测和去毛刺操作。案例的运作过程如图10所示,具体步骤如下:①需求方在社会交互网络服务平台(中心)上提交订单——渗碳喷丸大齿轮生产需求;②企业6投标获得订单后,进一步设计其详细的加工流程和加工要求,同时将自身不能完成的任务以外包的形式在平台上抛出齿轮加工订单;③企业6和需求方确定外包企业为1,3,5,7,形成④-⑤-⑥-⑦-⑧的产品生产链,各企业依次根据外包制造和产品设计的要求进行生产,并实时将相关的加工数据反馈至平台中心,完成各自加工任务后将完工工件运输到下一个企业进行下一步加工;⑨完成加工后,产品集中到企业6进行检查和装配;⑩最后通过平台将产品发送给需求方。在该过程中,企业之间的信息交互工作由社交操作员完成,社交操作员收集和整理平台数据后打包发送给企业的管理层进行决策,并将决策结果发布在平台,以实现信息的交互与共享。
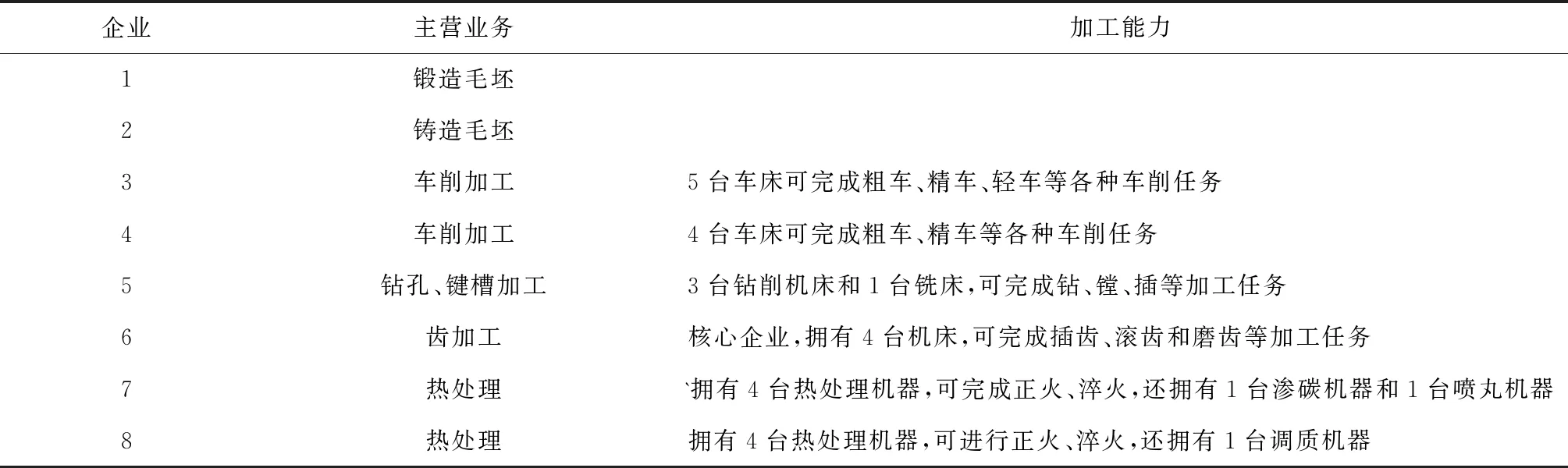
表2 齿轮制造相关企业的加工能力

下面以企业3的车削加工为例进一步分析车间作业过程,即用所拥有的5台车床分别对锻件(称为工件0)的齿顶圆、内孔、左端面、右端面和倒角进行粗加工。加工作业流程可以看作为虚拟空间多个智能体和车间动态环境之间交互的最优调控过程与现实世界实际加工调度过程的结合。复杂网络结构由节点集合和连边集合构成,节点对应实际中的个体,边为将节点连接在一起的某种关系。一个加工作业流程所需的节点,既包括物理节点(如生产线上的机器、工人、协作机器人、运输等),也包括虚拟空间的机器或人或软件/流程/知识/算法(统称为服务)和社会空间的人。经过如此抽象处理之后的加工作业流程,可用深度神经网络(Deep Neural Network,DNN)和强化学习结合而成的深度强化学习方法来实现加工作业的自适应优化。
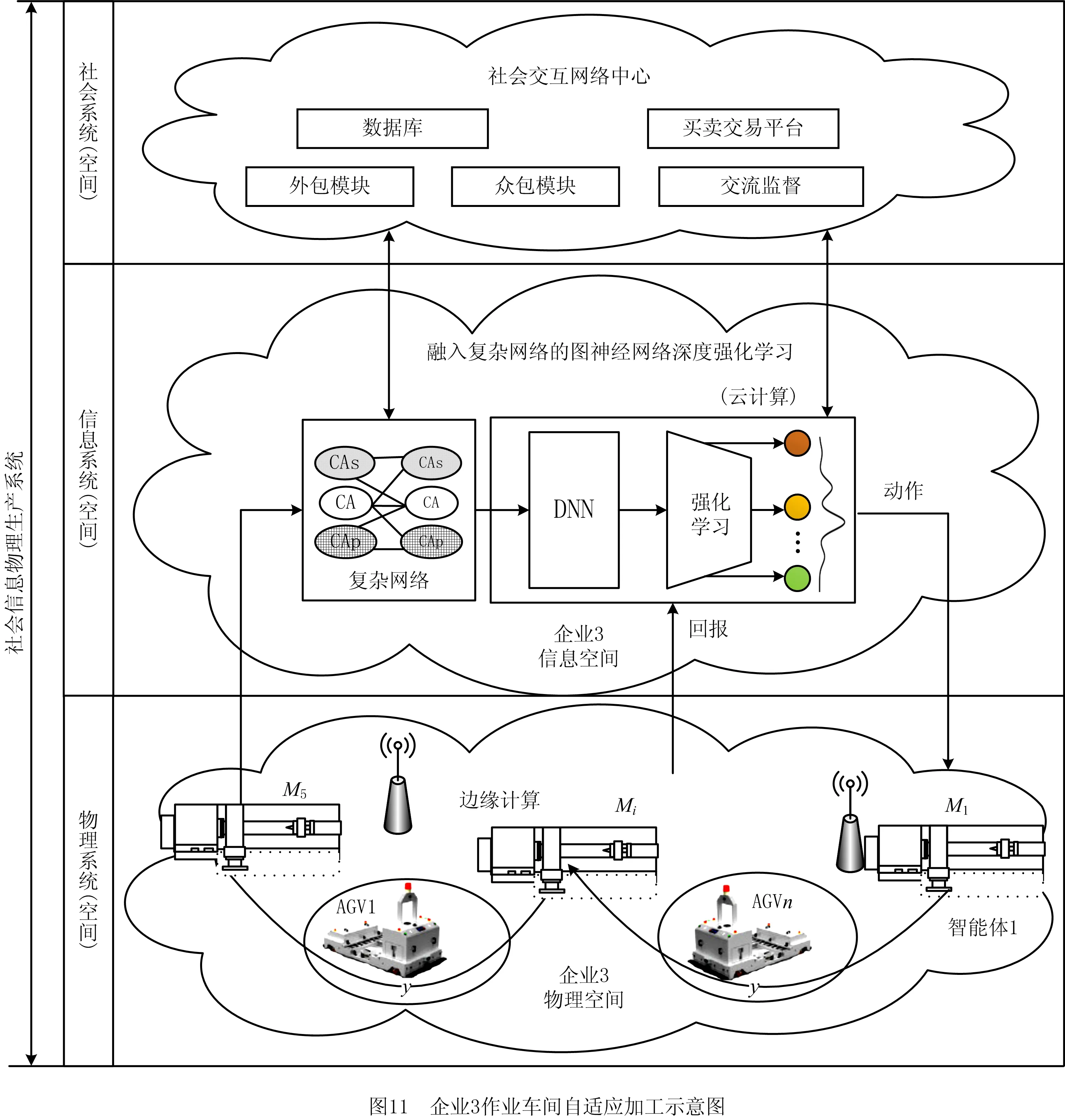
以如图11所示的机器(含人机协作机器人)与移动机器人自动导引小车(Automated Guided Vehicle,AGV)构成的企业3的柔性制造系统为例,将节点表示机器、连边表示物料运输(如AGV运输)的加工作业复杂网络模型嵌入DNN,并与强化学习相结合,形成图神经网络的深度强化学习模型,分散位于物理空间的AGV和机器,通过边缘计算进行自主决策,并将加工状态传至虚拟空间,而位于虚拟空间的“网络嵌入的DNN+强化学习”用于求解机器与AGV的协同作业问题,并将求解结果传输给机器和AGV进行实际加工。这种虚实结合的方法表示加工作业流程可以引入先验知识(如虚拟模型),而且深度强化学习网络可以先在虚拟空间进行仿真训练,即构建虚拟的车间调度环境并将智能体与虚拟环境进行交互,以实现作业调度优化学习,再迁移到实际生产场景。
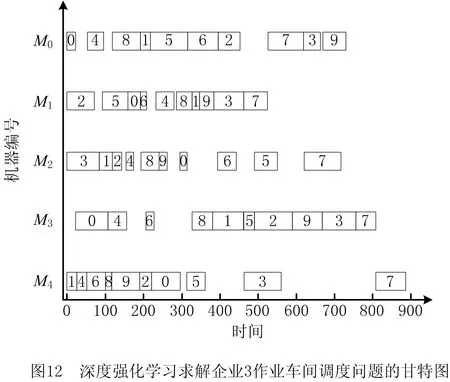
企业3需要加工的工件如表3和表4所示,其中工件0为接受外包的齿轮粗加工工件,其他工件为常规生产工件。通过深度强化学习的方法[48]求出其调度结果,如图12所示(因AGV运输时间短,为了便于学习求解,忽略工位之间的运输时间)。图中根据排产顺序绘制的加工过程甘特图,横轴表示这批工件加工开始后的时间;纵轴分为5个机器编号,编号右边的每一个方块表示一道工序,从左到右即该编号对应机器的加工顺序,方块的长度反映工序的加工时间,方块中的数字表示工件序号。显然,短小的方块位置比宽大的方块更多地靠近左边,即耗时较短的工序倾向于更早地加工,这是因为耗时短的工序加工起来更加灵活,在机器加工的间隙能够轻松地插入加工,使加工过程更加紧密,总加工时间更少,加工效率更高。最后,工厂通过虚实融合的CPS对加工过程进行实时状态监控和作业安排。
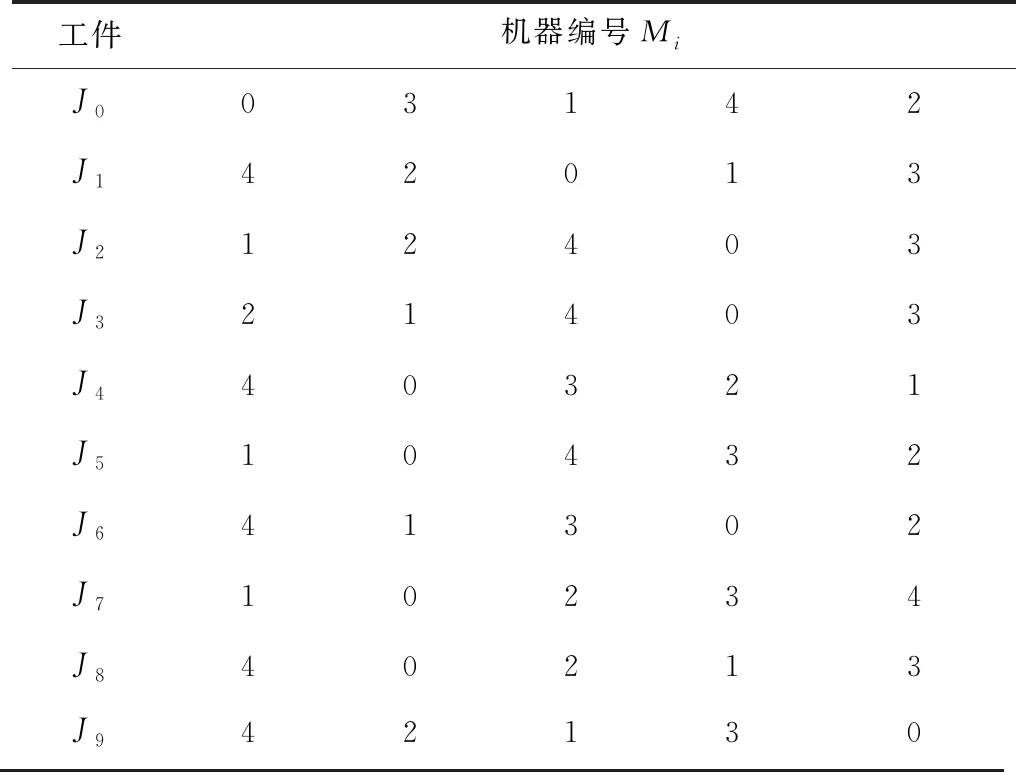
表3 加工顺序表
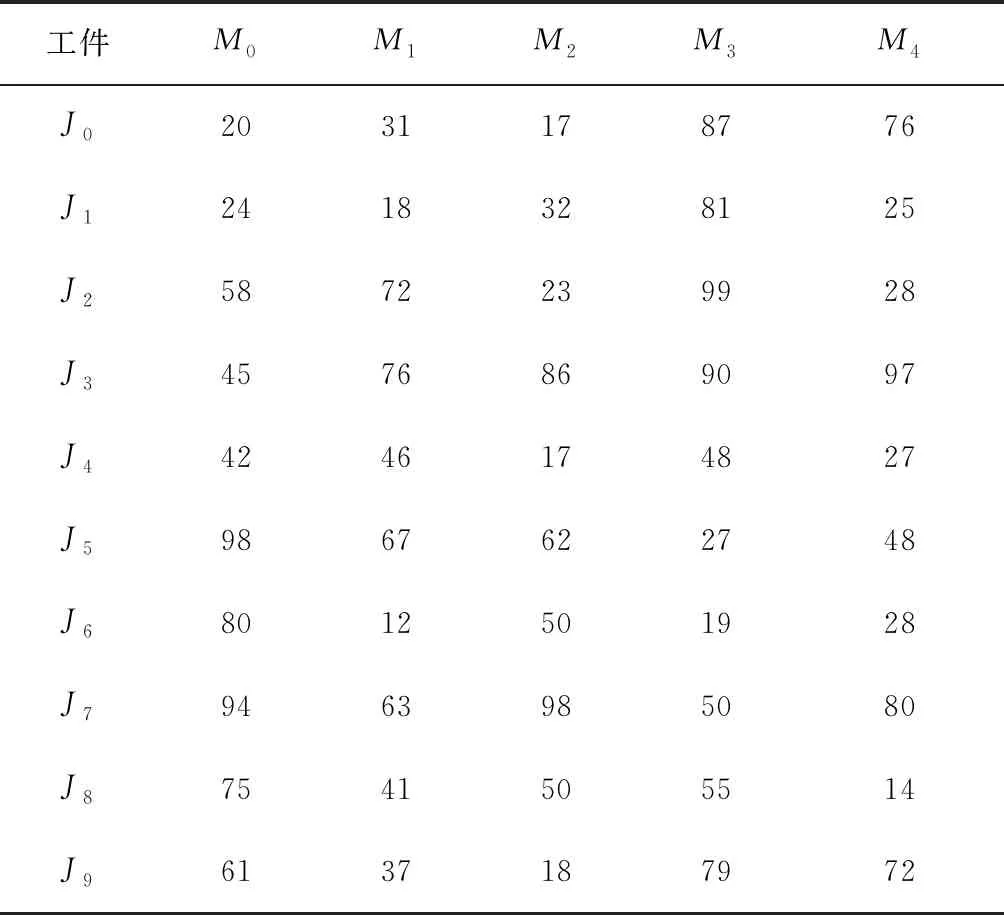
表4 加工时间表
7 结束语
本文从系统科学视角用混合驱动的人工智能方法对高级智能制造——自主智能制造中的人机物交互、人因、参考体系架构和运作机制展开研究,形成物理空间、信息空间和社会空间三位一体的人机物协同SCPPS。研究表明,即使为全面自主智能制造,仍需要人的参与,而且这种参与突破了传统人机交互在物理空间上的限制,渗透到虚拟空间和社会空间。从知识—数据混合驱动视角探讨人机物协同的自主智能制造,一方面可以通过“自上而下”的知识驱动方法,利用人类在制造领域积累的先验知识、经验以及模型的强解释性和易迁移性解决数据驱动的联结主义黑箱问题,另一方面可以利用“自下而上”的大数据驱动方法对事物、数据之间相关性分析的深入与广泛性,解决知识驱动方法对领域专家的依赖以及知识获取困难等问题,加上通过感知—动作的行为探索实现环境自适应强化学习,将符号主义、联结主义和行为主义3种主流人工智能学派有机融合在一起。
从广义上来说,智能制造系统包括智能生产、智能产品和智能服务,即便拥有无人自主智能生产线(物理生产系统),生产出来的产品终究是为了满足人的需求、服务于人的,同时在产品设计、服务和使用过程无疑不能缺少人的参与,应运而生的操作员4.0便是最好的例证。
本文旨在从宏观视角探讨自主(智能)制造的基本概念及其参考体系架构和运作机理,为理解和认识高级智能制造系统运作机制以及人在其中的作用和角色提供支持,未来需要结合具体生产场景进行进一步研究。诚然,在复杂制造场景中实现自主智能制造还有很长的路要走。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31
中老年保健(2022年5期)2022-08-24
娃娃乐园·综合智能(2022年8期)2022-07-28
英语文摘(2022年4期)2022-06-05
汽车实用技术(2022年7期)2022-04-20
南都周刊(2021年3期)2021-04-22
房地产导刊(2020年11期)2020-12-28
模具制造(2019年4期)2019-06-24
当代陕西(2019年8期)2019-05-09
海外星云(2016年7期)2016-12-01
