张拉整体基本单元几何稳定构型分析
2022-03-11 04:49:20王艳蒙刘贺平罗阿妮
哈尔滨工程大学学报 2022年2期
王艳蒙, 刘贺平, 罗阿妮
(哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001)
随着空间结构的迅速发展,传统空间结构[1-5]已经不能满足需求,因此发展新型空间结构受到了广泛的关注。张拉整体结构是一种由离散的受压杆件和连续的受拉索构件构成的一种自应力空间网格结构[6-11],张拉整体结构是一种自平衡体系[12-14],其稳定性是由结构参数和构件预紧力共同决定[15-17]。张拉整体结构还具有形状美观、构件结构简单、质量轻盈、展纳率高等特点[18-22]。本文从张拉整体基本单元进行构型参数分析,构型中p根杆必然对应p-1种构型,分析构型节点受力平衡获得平衡条件来判断斜索和杆及水平索空间位置关系,通过分析节点nd(i+j)分别处在相对节点nd(i)的4个象限位置来计算杆扭转角与斜索p-1种连接方式之间的函数关系,获得结构稳定时参数之间的函数关系,获得稳定构型条件。
1 张拉整体基本单元
三杆张拉整体单元是张拉整体结构的基础,此单元可以拓扑为具有更多杆构件的张拉整体单元,也可以通过拼接形成更多复杂结构的张拉整体结构。如图1所示为张拉整体基本单元[28-29],此张拉整体结构包括3根杆和9条索,上端面圆周半径ru、下端面圆周半径rd、端面间高度h、上下端面平行、上下端面形心连线垂直两端面、同一端面圆周上节点均匀分布;上下端面内的索为水平索,上下端面间的细实线为斜索,粗实线为杆构件。上下端面间的扭转角为φ,这里称为单元内旋转角(这一角度为任意一根杆构件的2个端点在底面上的投影与底面圆心的连线夹角)。
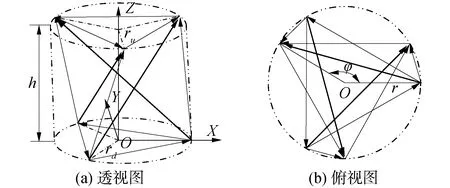
注:细实线为斜索,粗实线为杆构件图1 三杆张拉整体单元结构简图Fig.1 Schematic diagram of three-bar tensegrity unit
2 基本单元几何参数
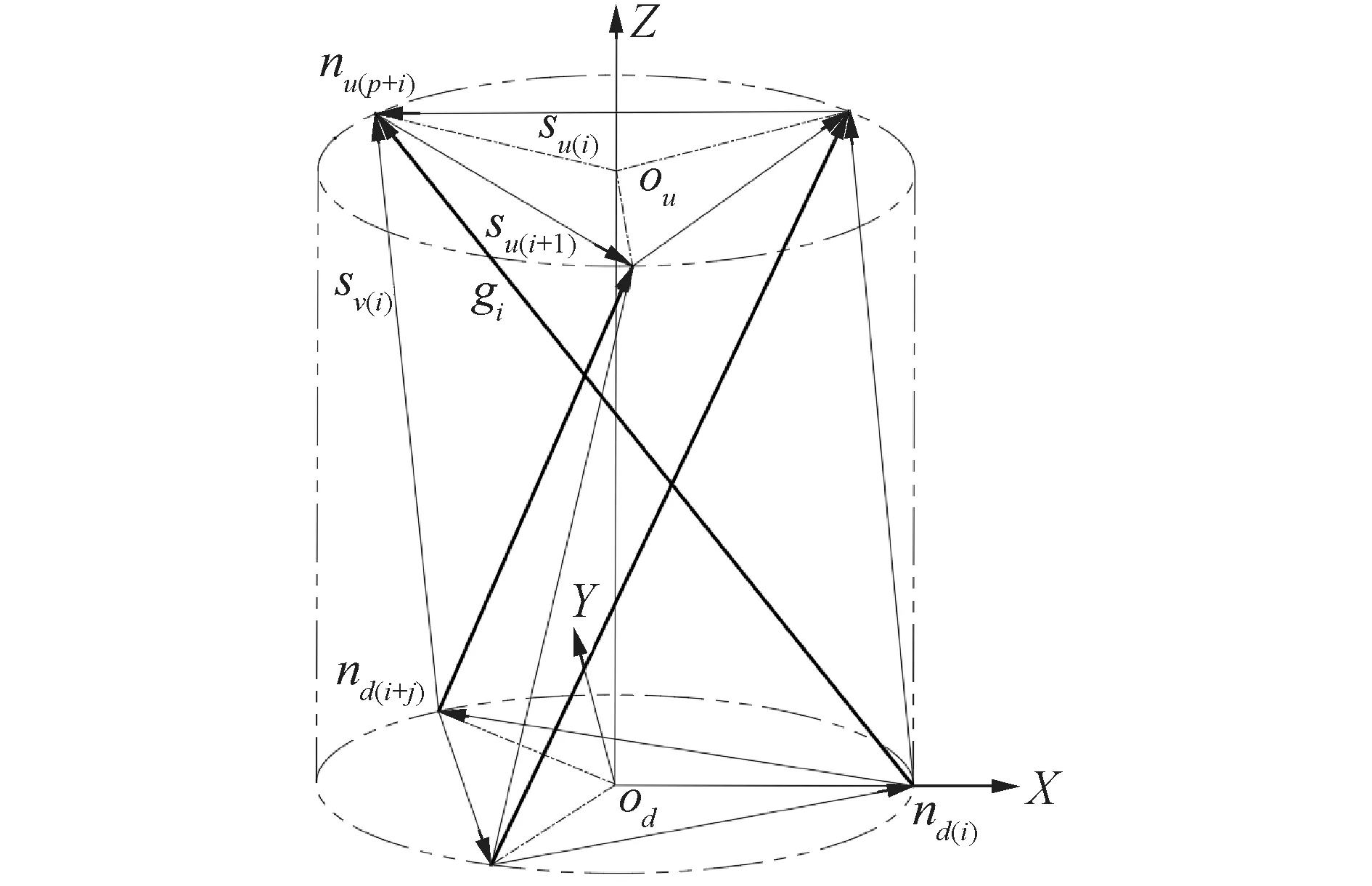
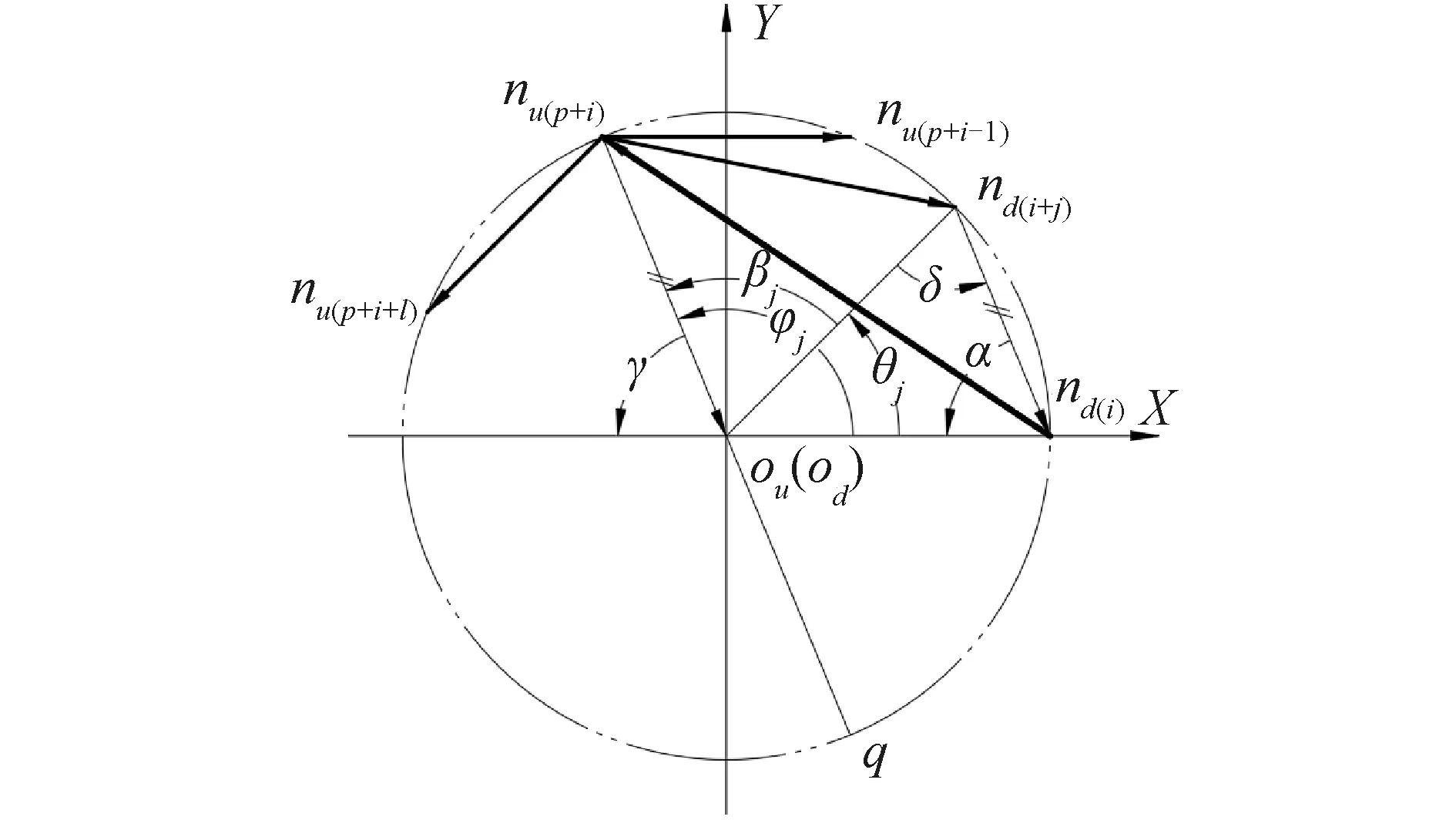
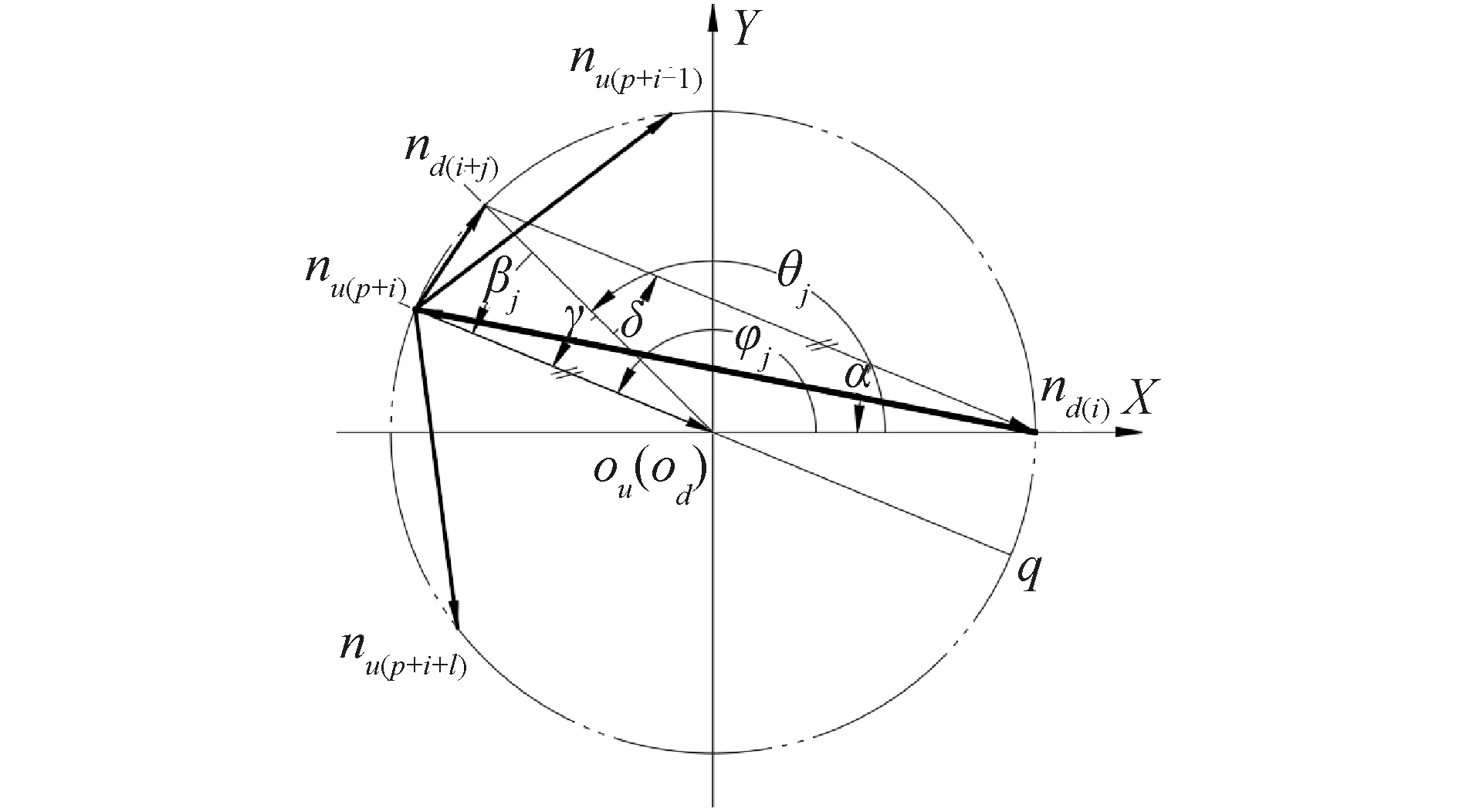
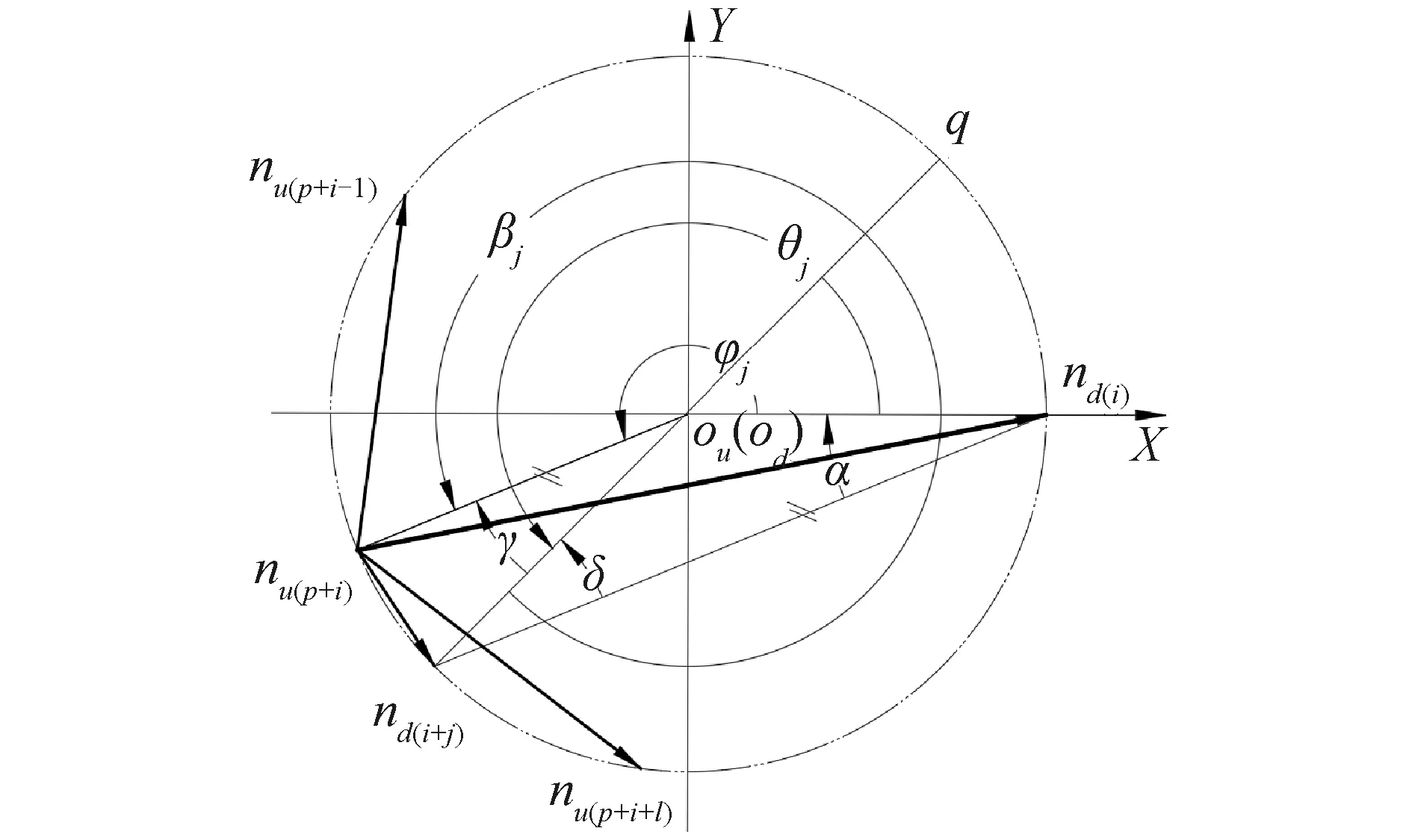
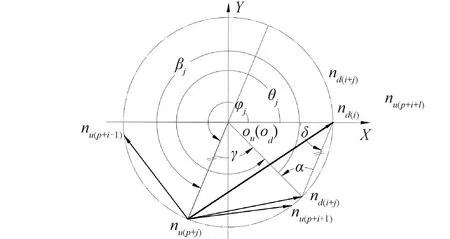
为了建立张拉整体基本单元的数学模型,定义基本单元外形包络几何参数,上端面半径ru,下端面半径rd,单元高度h(具体分3种情况,如图2所示,上下端面半径相等rd=ru和上下端面半径不等rd>ru和rd 图2 基本单元外形包络几何柱或台体Fig.2 Basic element shape envelope geometric column or table body 从构件组成的角度看张拉整体基本单元。杆构件个数p,2p根端面水平索,把2个端面分别围成正p边形,p根斜索均匀分布在两端面之间。 从节点与构件的连接关系看张拉整体基本单元,任意节点均与4个构件连接:1根杆、3根索。每个节点同时与其所在端面内相邻2个节点连接2个水平索,与另一个端面内的一个节点用1根杆连接,与另一端面除连接杆的节点之外的p-1个节点中的任一个节点,连接1根斜索,也即有p-1种斜索连接方式,相对应的杆绕z轴的扭转角为φj,斜索绕z轴的扭转角为βj。 通过以上分析,可以看出,p根杆必然对应p-1种构型(任意节点用1根杆连接另一端面的1个节点,则另一端面内仍然有p-1个节点,可以任选一个节点布置斜索),接下来探讨这p-1种基本单元稳定构型的条件,及不同稳定构型获得的结构中构件几何参数。分析影响稳定构型的关键因素。 当张拉整体基本单元杆的构件数为p时,基本构型有p-1种连接方式,连接方式不同则杆、索绕z轴扭转角φj,扭转角βj的值不同。 选择上端面节点进行分析(由于张拉整体单元结构具有对称性,且上下端面的每个节点受力情况类似,均受3个索的拉力和一个杆的压力),该节点受上端面2个相邻的水平索的拉力、上下端面间杆的压力和斜索的拉力如图3所示(su(i+1)和su(i-1)为2个水平索、svi为斜索、gi为杆)。而上端面的2个水平索的合力指向上端面圆心。由于张拉整体单元处于平衡状态,故节点受力处于平衡状态。平衡意味着2个力等大共线且反向、或3个力必须构成封闭的平面三角形且力的方向要首尾相连。节点平衡应用该共点三力平衡条件来判断斜索和杆及水平索空间位置关系,进一步深入到杆扭转角与斜索p-1种连接方式,这3个平衡力确定了一个平面。 图3 与上端面节点连接的构件及受力Fig.3 The member connected with the upper end face node and its force 上端面节点受到的3个力确定的平面与上、下端面的交线分别为直线ounu(p+i)、直线nd(i+j)nd(i)。单元的上下2个端面平行,所以2条交线必然平行。针对节点nd(i+j)分别处在相对节点nd(i)的4个象限位置来探讨单元的相位角φj(同时也是杆绕z轴的扭转角)及斜索绕z轴的扭转角βj,设定下端面节点nd(i)处在x轴正方向。 规定逆时针方向为正方向,当节点nd(i+j)处在第一象限时(如图4所示),节点nd(i+j)和nd(i)对应的圆心角θj为: 图4 节点nd(i+j)位于第一象限Fig.4 The node nd(i+j) is in the first quadrant 由几何关系确定杆绕z轴扭转的扭转角φj值:在三角形Δodnd(i+j)nd(i)中,θj角值已知,因为直线odnd(i+j)与直线odnd(i)为下端面半径,所以等腰三角形的2个底角,角α和角δ相等。由于直线ounu(p+i)平行于直线nd(i+j)nd(i),同位角α和γ相等。由以上条件可得p-1种构型中,杆及斜索绕z轴的扭转角与斜索连接方式j之间的函数关系。 由图中几何关系可知扭转角φj、βj为: 因为直线ounu(p+i)平行于直线nd(i+j)nd(i),同位角相等: γ=α 又因为等腰三角形Δodnd(i+j)nd(i)的2个底角相等: α=δ 由图中几何关系得3个角的关系: 杆扭转角φj、斜索扭转角βj与p、j的函数关系为: 在直线ounu(p+i)的延长线与端面圆交点q,由于力qnd(i)在节点处与其他2个力构不成平衡,即构不成封闭的首尾相接的矢量三角形,节点不在平衡状态,张拉整体结构单元不稳定,即不满足平衡条件,舍弃该点。 当节点nd(i+j)处在第二象限时如图5所示,规定逆时针方向为正方向,其中节点nd(i+j)和nd(i)对应的圆心角θj为: 图5 节点nd(i+j)位于第二象限Fig.5 The node nd(i+j) is in the second quadrant 在三角形Δodnd(i+j)nd(i)中,θj角值已知,直线odnd(i+j)与直线odnd(i)为下端面半径,等腰三角型的2个底角角α和角δ相等。由于直线ounu(p+i)平行直线nd(i+j)nd(i),内错角δ和γ相等。由以上条件可得p-1种构型中,杆及斜索绕z轴的扭转角与斜索连接方式j之间的函数关系。 由图中几何关系可知相位角φj、扭转角βj: 因为直线ounu(p+1)平行于直线nd(i+j)nd(i),内错角相等得: γ=δ 等腰三角形Δodnd(i+j)nd(i)的底角相等: α=δ 由图中几何关系得3个角的关系: 杆扭转角φj、斜索扭转角βj与p、j的函数关系为: 当节点nd(i+j)处在第三象限时如图6所示,规定逆时针方向为正方向,其中节点nd(i+j)和nd(i)对应的圆心角θj为: 图6 节点nd(i+j)位于第三象限Fig.6 The node nd(i+j) is in the third quadrant 在三角形Δodnd(i+j)nd(i)中,θj值已知,直线odnd(i+j)与直线odnd(i)为下端面半径,等腰三角形的2个底角,角α和角δ相等。由于直线ounu(p+i)平行于直线nd(i+j)nd(i),内错角δ和γ相等。由以上条件可得p-1种构型中,杆的绕z轴的扭转角与斜索连接方式j之间的函数关系。 由图中几何关系可知扭转角φj: φj=θj-γ 因为直线ounu(p+i)平行于直线nd(i+j)nd(i),内错角相等: γ=α 又因为半径相等的等腰三角形Δodnd(i+j)nd(i)底角相等: α=δ 由图中几何关系得3个角的关系: 杆扭转角φj、斜索扭转角βj与p、j的函数关系为: 当节点nd(i+j)处在第四象限时如图7所示,规定逆时针方向为正方向,其中节点nd(i+j)和nd(i)对应的圆心角θj为: 图7 节点nd(i+j)位于第四象限Fig.7 The node nd(i+j) is in the fourth quadrant 三角形Δodnd(i+j)nd(i)中,θj角值已知,直线odnd(i+j)与直线odnd(i)为下端面半径,等腰三角形的2个底角,角α和角δ相等。由于直线ounu(p+i)平行于直线nd(i+j)nd(i),内错角α和γ相等。由以上条件可得p-1种构型中,杆的绕z轴的扭转角φj与斜索连接方式j之间的函数关系。 由图中几何关系可知扭转角φj: φj=θj-γ 因为直线ounu(p+i)平行于直线nd(i+j)nd(i),内错角相等: γ=α 等腰三角形Δodnd(i+j)nd(i)中底角相等: α=δ 由图中几何关系得3个角的关系: 杆扭转角φj、斜索扭转角βj与p、j的函数关系为: 1)稳定构型的条件独立于基本单元的外形包络几何参数(上端面半径ru,下端面半径rd,单元高度h),只由杆数目p及连接同一节点的杆、斜索的另一端节点序号差j,确定单元的稳定性,且这2个因素一一对应,相互依存,满足以下条件。 3)稳定构型中杆、斜索的扭转角φj、βj满足当节点nd(i+j)处于一、二象限时φj+βj=π,当节点nd(i+j)处于三、四象限时φj+βj=3π。 4)杆扭转角φj与φp-j关于坐标系x轴对称:φj+φp-j=2π。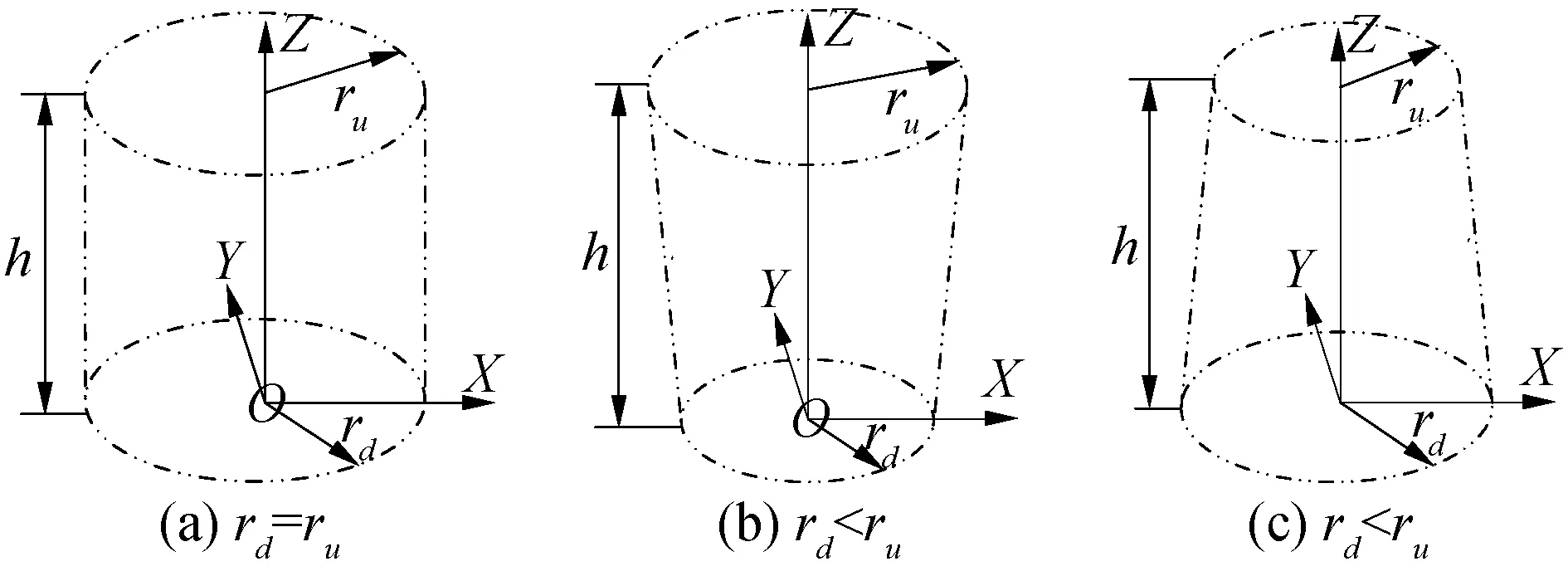
3 稳定构型影响因素分析
3.1 节点nd(i+j)处在第一象限

3.2 节点nd(i+j)处在第二象限
3.3 节点nd(i+j)处在第三象限

3.4 节点nd(i+j)处在第四象限


4 结论

猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:02
中学生数理化·高一版(2022年3期)2022-04-05 08:17:14
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
电子测试(2018年11期)2018-06-26 05:56:04
电镀与环保(2017年6期)2018-01-30 08:33:37
中学生数理化·七年级数学人教版(2017年4期)2017-07-08 11:48:34
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23
设备管理与维修(2016年6期)2016-03-16 02:21:54
中学生数理化·七年级数学人教版(2015年3期)2015-05-30 10:48:04
制造技术与机床(2015年10期)2015-04-09 07:05:42