
系留无人机自动收放线设备设计与研究
2022-03-10 01:45:32侯洁明孙桂祥
设备管理与维修 2022年1期
侯洁明,孙桂祥
(合肥赛为智能有限公司,安徽合肥 230031)
0 引言
系留无人机又称系留式无人机,为多旋翼无人机的一种特殊形式,通过系留线缆将地面电源传输至高空飞机,代替传统的锂电池,最主要的特点是拥有长时间的滞空悬停能力。系留无人机多用于通信中继、应急抢险、高空检测、高空视频监控、高空照明等,系留无人机与电信基站组合可以快速部署在因自然灾害受损的地区。系留无人机由地面高压直流稳压系统、放线器、同步绕线轮、系留电缆、空中稳压模块和备用电池组成,高压直流稳压系统和同步绕线轮安装在自动收放线器上,系留电缆与稳压模块和备用电池连接。
本文主要讨论地面智能自动收发线设备(下文简称收放线机构),通过地面高压电源将220 V 或380 V 交流电转换成750 V 直流电,通过系留线缆传输至无人机电源舱,经过无人机机载电源舱处理后,输出48 V 直流电供给无人机的电机、电调、飞控、载荷等模块使用,同时配备了两块动力电池作为UPS切换系统的电源。收放线机构在保证供电和通信稳定可靠的同时实现线缆随飞机飞行高度自动收放。
1 电缆收放线设备设计要求
系留无人机的最大飞行高度为350 m,地面装置能提供750 V 直流、12 kW 高压电源,由3 根光纤通信。飞机以2 m/s的速度上升或下降的过程中,线缆能够根据张紧度自动放线或者收线。飞机在空中悬停工况下不可避免会受到横向风的干扰,线缆也会因风的作用而左右摇晃,诸多因素的作用下,线缆会有不间断的拉升和收回动作。因此自动收放线机构在绕线机上增加机械缓冲装置,在电机控制上需要做相应的控制设计,保障线缆的张紧度均一,保障飞机在高空中不受线缆的拉扯影响。由于线缆长度为360 m,即使加载高电压,线缆本身也有发热状况,因此当线缆缠绕在收放线机构内部的绞盘上时,热量会持续增加,在夏季炎热季节现象更为明显,所以结构中要有通风换热装置。飞机在飞行和工作状态下,自动收放线机构是无需人为干预的,一个良好的人机交互系统是很必要的。由于此系留无人机大多应用在紧急和特殊状况下,因此地面自动收放线机构要有体积紧凑、移动方便、抗干扰、部署便捷等特点。
2 设计参数与计算
2.1 绕线轮设计
绕线轮外圆采用6063 铝板加工拼接而成,厚度3 mm,铝板总共用有24 块。在线轮轴一端加工线缆槽,线缆通过线缆槽进入线轮轴内部,并固定在线缆卡上,线轮旋转实现收放线。线轮侧板从中心向外逐渐收窄,目的是防止在收放线缆时对晃动的线缆造成磨损。线轮轴外径340 mm,绕线轮宽度366 mm,线缆直径按照4.5 mm 设计,则绕线轮绕线层数及长度见表1。
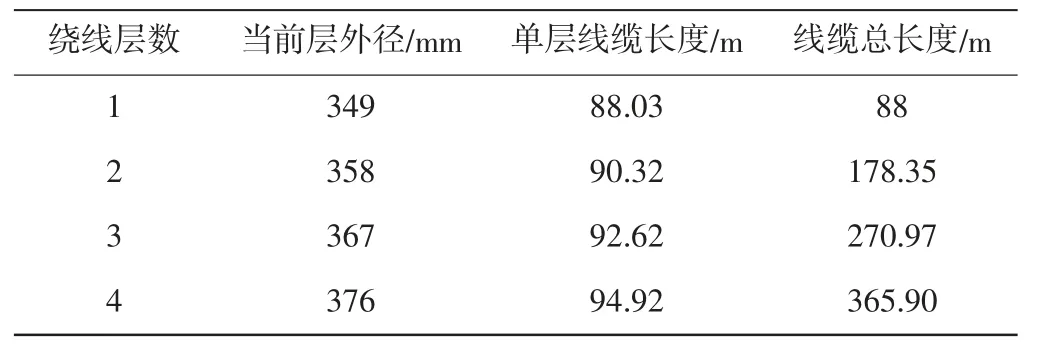
表1 绕线轮绕线计算
线轮最小内径Φ1=0.17 m,线轮重G1=7.21 kg,绕线8 层是线轮外径Φ2=0.22 m,线长L=390 m,线缆单重g=0.033 kg/m,则线缆总重:

绕线轮重大重量:

绕线轮总的转动惯量为:

绕线轮最大线速度V=2 m/s,速度从零加速到最大速度时间t=2 s。
线轮角速度和角加速度分别为:

绕线8 层时线轮转速和转矩分别为:

2.2 电机选型与减速器
电机选择北京时代超群电器的直流无刷电机80BL100S40-430:额定电压48 V,额定功率500 W,额定转矩1.6 N·m,额定转速3000 r/min,空载转速4000 r/min,额定电流14.8 A,空载电流1.5 A,极对数2。
行星齿轮箱选择北京时代超群PX80N004SW 行星减速机:减速比4∶1,实际减速比4∶1,输出转矩40 N·m,输入转速300 r/min,效率90%,回程间隙18 arcmin,机身长度76 mm,重量1.35 kg,极数1,配套电机为80 无刷电机。
减速链轮齿数15,绕线链轮齿数82,传动比为15∶82。计算电机在不同电流下线轮的转矩见表2。当工作电流达到8.5 A时,线轮转矩12.55 N·m,满足线轮绕线要求。

表2 不同电流下线轮转矩N·m
2.3 传动机构设计计算
丝杠导程为15 mm,当绕线轮转动1 周,丝杠滑块移动距离为15×0.34≈5.1 mm。而线缆的直径4.5 mm,丝杠滑块的移动距离与线缆直径相当,满足绕线需求。
3 结构设计
3.1 滚轮总装
绕线轮是缆线存载体,设计要求线缆总长360 m。由于线缆通过12 kW 的工作载荷,即便将电压升至650 V,工作中的线缆仍然会发热,为了不让线缆聚集发热,设计要求线缆不能在绕线轮上缠绕过多圈数。
绕线轮的一端安装有光电滑环,光电滑环可保证旋转的同时电流和信号不受干扰地通过。绕线轮的另一端是通孔,散热风扇安装在外侧组件上,气流在风扇的动作下引入绕线轮内部,在通过绕线轮轮条上的空隙向外扩散,带走线缆上的热量。
为方便加工和组装,绕线轮外圆采用6063 铝板加工拼接而成,铝板总共用有24 块。铝板中间开孔一则是为了减轻重量,二则是方便气流从中间通过,绕线轮外圆直径340 mm,线轮宽度366 mm,则单圈周长1067.6 mm。则按此推算则第1 层绕线80.03 m,第2 层绕线90.32 m,第3 层绕线92.62 m,第4 层绕线94.92 m,4 层累计总长度是365.9 m,满足设计要求。绕线轮是需要转动的,则在绕线轮的两端安装有两款瓦房店东方神力精密轴承的等截面超薄壁轴承(KC040XPO 101.6×120.65×9.525和KC047XPO 120.65×139.7×9.525)。一端轴承内孔安装有光电滑环,保证绕线轮旋转的同时供电持续稳定,通信流畅良好。另一端轴承内孔安装有链轮和散热通道,链轮是在部驱动链条的作用下驱动绕线轮转动,散热通道是为风扇将外部空气吹入内部留有的空间。
3.2 缓冲区底盘
正常工况下系留无人机在空中悬停是稳定无波动的,但是在飞机起飞爬升和紧急下降过程中线缆就必须快速响应地放线和收线动作。由于绕线轮自身重量较重,必定有较大的转动惯量,电机的驱动加速度也是有极限的,因此在机器的底部设计增加了线缆的缓冲装置。当飞机突然升高或外界干扰紧急拉伸电缆的状况下,此缓冲装置的重要作用就是吸收线缆突然拉出的力量,当绕线轮还来不及动作释放电缆的情况下缓冲装置释放出储存在内部的部分电缆;在飞机紧急下降中,线缆空中滞留较多需要快速响应收入并缠绕至绕线轮上,此时缓冲装置中的机构就会吸收掉这部分多余的线缆。而后控制系统会根据传感器反馈的情况迅速调整控制电机运动,驱动绕线轮正转或反转弥补上中间段的延迟期。缓冲区底盘分前后两个部分,为减轻其重量将材料中间无功能部分做偷料处理,前底板既是线缆的缓冲装置又是整个机架的底部结构件,后底板是承托着无刷伺服电机和减速器的作用,对整个机器的底部也起到支撑连接的作用。
前底板上安装共有3 个定滑轮、1 个动滑轮、1 组直线导轨、1 个钢丝定滑轮、1 个钢丝轮、1 个发条弹簧和1 组角度传感装置。线缆盘绕在中间的绕线轮上,通过下部的中转轮引导至底部的缓冲装置。定滑轮1 改变线缆方向,引导线缆穿过底部,定滑轮2 再次改变线缆方向将线缆引导至动滑轮上3 上,最后通过定滑轮4 引导至机器其他装置上。动滑轮中间转动轴由钢丝绳牵引,通过钢丝定滑轮改变方向最终缠绕在钢丝轮上,钢丝轮底部安装有发条弹簧,此时动滑轮的运动便由发条弹簧的势能控制。平时弹簧收紧,动滑轮在启始位置,线缆会预留在动滑轮的右侧,当线缆突然拉扯出去,动滑轮向导轨的另一端运动过去,释放线缆的同时也吸收掉部分的拉力,收线工作机理相反。
钢丝轮的另一端安装有小齿轮,再通过其后的大齿轮啮合传动将转动角度传递出去,大齿轮上的角度传感器实时监测到角度位移。线缆的拉伸力便通过滑轮组件转换为角度位移数值最终发送给控制系统。
3.3 导向阻尼
线缆从绕线轮至机器外部,由导向阻尼结构进行引导。导向机构分3 组轮,底部导轮上有海绵,线缆从左右轮中间穿过,导向轮两侧安装有扭力弹簧,在弹簧的作用下底部导轮夹住线缆。底部导轮既可以夹持住线缆又不影响线缆拉出与回收速度,中部导轮起到约束线缆左右位置移动,上部输出导轮约束线缆前后位置移动。整套导轮系统既可以约束线缆方向又不影响线缆的抽拉移动,并且顺利地将线缆引导至内部绕线轮上。
3.4 链轮传动
右侧板传动距离较远采用链轮传动,绕线链轮齿数82,排线连轮齿数52,传动比i1=82/52。通过排线轮轴将动力传递给左侧排线齿轮。排线齿轮齿数30,丝杠齿轮齿数140,传动比i2=3/14。传动系统总的传动比:

计算功率Pca是根据传递的功率P,并考虑到载荷性质和原动机的种类而确定的:

式中 Pca——计算功率,W
P——传递的功率,W
WA——工作情况系数,中等冲击系数1.2
根据链传动的工作情况、主动链轮齿数和链条排数,计算链节距。链的节距P 的大小,反应了链条和链轮齿各部分尺寸的大小。在一定条件下,链的节距越大,承载能力就越高,但传动的多边形效应也要增大,于是振动、冲击、噪声也越严重。所以设计时,为使传动结构紧凑,寿命长,尽量选取较小节距的单排链;速度高、功率大时,则选用小节距的多排链;从经济上考虑,中心距大、传动比小时,选大节距单排链。
根据链条接距和传动条件对P0进行修正:

式中 P0——在特定条件下单排链所能传递的功率,W
Pca——链传动的计算功率,W
KZ——小链轮齿数系数
KL——链长系数
KP——多排链系数
4 电路控制部分
整个系统由外部发电机供电,三相交流电接入地面收放线机构,4P 空气开关负责过载保护,此处分出一路220 V 电给收放线机构和控制电路板供电,另一路380 V 电路供给地面电源,地面电源将电压升至750 V,再接入电缆上,电缆在地面是缠绕在绕线轮上的,外部接入飞机(图1)。

图1 控制电路
5 电机控制
电机控制采用闭环方式工作,放线的控制算法是典型的PID(Proportional Integral Derivative,比例积分微分),收线动作则采用P 算法(图2)。在收放的底部有线缆缓冲装置,其底部的动滑轮和角度传感器将线缆的张紧转换为角度物理量,通过A/D 数值转换输入到控制单路中,最后将计算结果再反馈至驱动电机中。实际工作中,线缆能跟随飞机的高度自动放线和收线动作,并且线缆始终保持一定的张力。
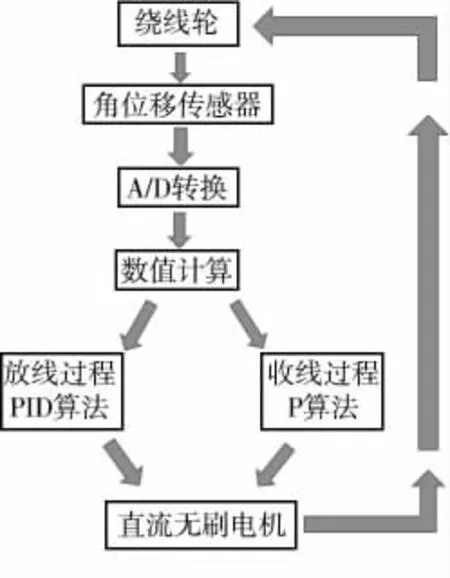
图2 算法原理
6 结语
系留无人机的地面收放线设备是系留无人机的重要组成部分,它为无人机提供动力支持和通信转发,其机构的可靠性关系到无人机的飞行安全。系留无人机地面收放线设备在系留无人机滞空过程中伴随着飞机的上升和降低,保持着线缆的自动收放工作,并且稳定提供电能、保持通信畅通。由于电缆长度超过300 m,为保持电力不在线缆上损耗,工作中将电压升到750 V,在绕线轮中加装排风扇用强风冷却缆线上的热量。本文着重设计计算系留无人机地面收放线机构中的传动系统、机械结构、缓冲装置和电控系统,此设计研究已经过试飞验证并多次测试,测试时间达到500 h,在经过3 次设计修改后已推出定型产品,在电信企业和通信单位得到成功运用并得到良好效果。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:14
防爆电机(2020年6期)2020-12-14 07:17:04
初中生学习指导·提升版(2020年5期)2020-09-10 07:22:44
制造技术与机床(2019年11期)2019-12-04 05:50:36
决策探索(2019年19期)2019-10-21 09:16:32
物理通报(2019年7期)2019-06-29 07:32:56
汽车零部件(2018年11期)2018-12-08 06:24:22
物理通报(2018年9期)2018-08-31 07:45:58
制造技术与机床(2017年11期)2017-12-18 06:47:08
电子制作(2017年20期)2017-04-26 06:57:36
