
一种小型智能水上救援机器人的设计
2022-03-09 02:53盛肖炜,于林鑫
江苏工程职业技术学院学报 2022年4期
盛 肖 炜,于 林 鑫
(1.无锡开放大学机电与信息学院,无锡 214011;2.东北大学信息科学与工程学院,沈阳 100180)
0 引言
我国水域面积辽阔,在村庄附近的河流或湖泊经常可以看到水中游泳嬉戏的人,也有人会在水上主题乐园等封闭室内环境进行水上活动。无论是室内还是室外的水上娱乐活动,溺水事故始终是水上娱乐活动最大的安全隐患。根据国家卫健委统计,我国每年约有5.9 万人死于溺水,其中未成年人占95%以上。[1]发生溺水事故时,若施救者没有专业救生技能而盲目入水救人,易造成“一人落水多人罹难”的恶性事故。因此,开发水上救援装备来保证施救者和落水者的生命安全,提高救援的成功率显得尤为重要。
世界各国对水上救援装备的研发相当重视,救援装备也从最初简单的救援绳、救生圈更新换代到如今先进的救援艇、救援机器人。希腊研发的救援机器人Emily 能已远超救生员的速度实时响应应急救援要求,承载量大,能直接将被救者拖拽回安全地带。我国发布的《国务院办公厅关于加强水上搜救工作的通知》(国办函〔2019〕109 号)强调要注重水上救援装备研发配备和技术应用,加强内陆湖泊、水库等水域救援和深水救捞装备建设,实现深潜装备轻型化远程投送,提升应急搜救能力。我国研发的“海豚一号”水上救援机器人具有续航时间长、负载能力强、操纵距离足够远等特点。
目前常见的一些大型水上救援机器人虽功能全,但体积庞大、不易收纳,须借助大型机械设备运输和专业人员辅助操作,设备养护成本高,操作复杂,且通常不适用于城市内河环境和室内水上娱乐场所,故本文设计了一款体积小、动力强、功能全、性能稳,能应对各种复杂水情、实现快速救援的小型水上救援机器人。
1 水上救援机器人功能分析
1.1 水上救援机器人工作模式
根据使用环境和救援场合不同,救援机器人有两种模式可供选择:①智能识别模式。完全无人化操作,机器人自主巡航,可通过智能识别技术自动识别溺水事件并救援溺水者,同时自主避开路径上的障碍物。智能识别模式的工作流程见图1。②远程遥控辅助模式。当水情复杂,机器人无法自主实施救援时,则人工通过智能终端远程控制机器人进行救援作业。远程遥控模式工作流程见图2。

图1 智能识别模式工作流程

图2 远程遥控辅助模式工作流程
1.2 水上救援机器人性能分析
1) 机械结构稳定可靠。整个机体以ABS 塑料一次性冲压而成,以轻铝合金为骨架,既身形轻巧又结构稳固。机体采用流线型设计以减少航行过程中水流对机身的阻力。整个机身设计符合人体工学,人可以准确稳固地趴伏在浮板上,防止水进入口鼻和眼部。此外边缘设置防水硅胶用来增强防水性。机体头部配置软体防撞头,运动中可防撞、防擦伤,缓解冲撞力,有效保护机体。
2) 载重能力强,响应速度快。水上救援机器人在负载1 名体质量约90 kg 成人的情况下速度能达5 m/s。远程遥控模式下最快能以25.2 km/h 的速度驱动,迅速抵达落水者附近。除用于救人,还能运输救援物资等,最大载重可达200 kg。
3)续航时间长。机器人内嵌30 000 mAh 高倍率锂电池,能够为整个机器人系统和各个分模块提供稳定的供电电压,续航时间最长可达60 min。电池设计成可拆卸式,可随时更换备用电池。如此长的续航能力,能够保证救援的连续性。
4) 动力足。内置防水型双电机动力推进器,保证动力充足的同时能快速实现转弯。推进器还有防缠绕设计,以降低在水中被水草缠上的概率。电调系统设计成五级变速,也可实现定速巡航。
5) 智能性高。在远程遥控辅助模式下,操作者只要在岸边远程遥控就能实现智能救援。在智能识别模式下,救援机器人发出声光报警提醒人们危险产生,智能躲避行进路径上的障碍物,精准快速到达目的地附近实施救援。此外还专门配备了2.4 GHz 无线通信的遥控终端,遥控终端配有显示数据信息的高亮大屏,在阳光强烈直射下仍能清晰显示电池电量、实时油门数据。
6) 特色弹射功能。通过前置摄像头和红外热成像仪模块采集水面是否有溺水者的信息,当采集到有溺水者的信息时,一次性多角度弹射多发压缩救生圈至溺水者身旁,大大提高救援效率。
2 控制系统硬件设计[2-3]
控制系统硬件设计采用模块化的设计思路。图3 所示为硬件设计系统框架图。硬件设计系统包括以下模块:

图3 硬件设计系统框架图
1) 主控模块。选用树莓派Raspberry Pi 3B 为主控模块,统筹协调其他各个模块,主控芯片选择64 位1.2 GHz四核Broadcom BCM 2837芯片,Raspberry Pi 3B 最小系统电路图见图4。

图4 Raspberry Pi 3B 最小系统电路图
远程遥控辅助模式下,主控制器实时处理救援机器人的轨迹、速度、定位信息等参数,通过无线通信模块传输到遥控终端,岸边操作人员监控到运行信息反向发出指令,然后主控模块分析处理指令,协调其他各个模块精准驱动救援机器人到达指定救援位置。智能识别模式下,主控模块根据采样的各种信息直接操纵机器人的运行。
2) 供电模块。锂电池供电电压为12 V,降压开关型稳压芯片LM2596S-5.0 和电源转换芯片RT9013-33GB 向系统其他各个模块稳定提供所需的5 V 和3.3 V 两种电压,如图5 所示。采用电量计芯片DS2762 来监测电池温度、电压和电流,DS2762 芯片通过I2C 总线和主控芯片通信。整个供电模块体积较小,质量较轻。

图5 供电电路
3) 电机驱动模块。电机驱动模块选用AT8236 电机驱动芯片,驱动电路见图6,芯片为单通道电路输出,可以驱动1 个电机,其中AO1、A02 与BO1、BO2 为2 路驱动信号输出,分别驱动2 个电机。整个救援机器人需要分列于左右侧的2 个直流步进电机驱动,故使用2 块电机驱动芯片,利用2 个电机转速差实现转弯。驱动模块外接的2 路驱动信号采用外接PWM 信号同时控制2 个电机正反转和速度。

图6 电机驱动电路
4) 避障模块。采用HY-SRF05 非接触式超声波传感器(由超声波发射器、接收器和控制器3 部分组成,电路见图7),通过串口与主控模块通信。机器人本体两端各设置1 个超声波传感器。模块的工作电压为5 V,性能稳定,测量距离时精确度高。智能识别模式下,系统发出10 μs高电平脉冲信号就能触发模块发出超声波信号,遇到障碍物时超声波弹回。模块自动发出8 个40 kHz方波,不断检测是否有超声波返回信号。如果检测到返回信号,则计算出检测距离,主控制器实时处理数据,执行相应的避障策略。

图7 超声波传感器电路
5) 视觉采集传输模块。机器人本体前方的CDD 摄像头支持1 280*720 像素,对周边环境进行图形采样和识别,通过2.4 GHz 无线传输模块上传到移动终端,让操作人员能实时监控救援机器人。红外热成像模块选用美国FLIR 公司的Lepton 模组(渐进式扫描阵列格式160×120,热灵敏度达到0.050℃),Lepton 红外热成像模组电路见图8,模组通过串口与主控模块通信。红外热成像仪和摄像头监测湖面状态,对图像进行记录及分析,主控模块对图像处理与机器学习交互处理后的数据进行深度识别,实现对周围环境信息无死角检测。

图8 Lepton 红外热成像模组电路
6) 2.4 GHz 无线通信模块。无线通信模块电路见图9。模块选用nRF24L0+无线传输芯片,与主控芯片通过SPI 通信协议实现数据交互,开机就实现自动扫频,体积小,精度高,抗干扰能力强,不受地域影响,能实时响应控制终端和主控模块间的通信。

图9 2.4 GHz 无线通信模块电路
7) 导航定位模块。模块选用Wheeltec 公司N100 型惯导单元,通过串口与主控模块通信,能获取机器人的加速度、角速度、磁力计等原始数据,再经计算得到三轴姿态数据的精度参数,进而根据精度参数进一步调节机器人的位置和方向,更有利于施救。
8) 智能控制终端模块。控制终端采用手持式遥控器,自带OLED 显示屏,与无线通信模块通过2.4G 无线通信协议实现信息互联。
3 控制系统软件设计[4-6]
3.1 主程序设计
水上救援机器人主程序流程图见10。机器人开始工作,供电模块给各硬件模块供电,所有软件参数初始化。导航定位模块开始采集机器人初始位置和姿态信息,上传到主控模块,记为机器人前进的启动点。供电模块中电量计芯片DS2762 监测电池电量,电量数据通过I2C 总线上传到主控模块,一旦监测到电池电量低于报警电量3 000 mAh,整个机器人就停止工作,经人工补充电量后,程序回到初始状态。若监测到电量高于报警电量,根据智能控制终端上位机选择的运行模式,主程序选择进入智能识别子程序或远程遥控子程序。

图10 系统主程序流程图
3.2 智能识别模式程序设计
智能识别模式的程序子流程图见图11,机器人从启动点开始运行,视觉采集模块收集的数据通过机器视觉识别技术反馈到主控模块。主控模块采用YOLO(You Only Look Once,简称YOLO)算法对溺水者进行机器视觉识别。YOLO 算法是一种直接采用回归(Regression)思想进行深度学习对目标进行检测的方法。[7]机器识别完成,若判定不存在溺水者,机器人则不断巡视湖面,重新进行视觉采集。若判定存在溺水者,声光报警系统则发出信号,提醒周边人群危险出现,也让溺水者意识到救援行动开始,同时根据识别到的溺水者目标识别点开始规划路径。规划好路径后,启动分列左右两侧的两个步进电机,机器人按照规划路径前进。同时视觉采集模块仍然不断采集周边环境信息,若识别出新的障碍物,则关闭两个动力电机,重新规划前进路线,调整方向重新启动电机继续按新路线前进;若不存在新的障碍物,机器人则按原有规划路径前进到达目标识别点附近后停下,关闭电机。

图11 智能识别模式程序子流程图
主程序采用TDOA 无线定位算法来判断是否由于速度过快超过目标识别点。[8]TDOA 算法通过信号源的信号到达不同基站之间的时间差来构建双曲线数学模型,再利用这些双曲线的交叉点来确定信号源的位置。若超过目标识别点,则重启电机,调整方向,回到目标识别点附近。若没有超过目标识别点,则触发弹射装置,等待溺水者攀爬到救援机器人上,等待一段时间后机器人按照规划好的路径返航。在返航过程中如果遇到新的障碍物,按照前述流程重新规划路径,最终将溺水者安全送回启动点。
3.3 远程操作模式程序设计
远程遥控辅助模式的程序子流程图见图12,岸边施救者人眼发现溺水者,通过智能终端发出启动指令,救援机器人启动出发。人眼判断机器人到达溺水者附近,通过智能终端发出开启弹射装置指令,开始救援。救援完成,通过智能终端发出返航指令,机器人开始返航。
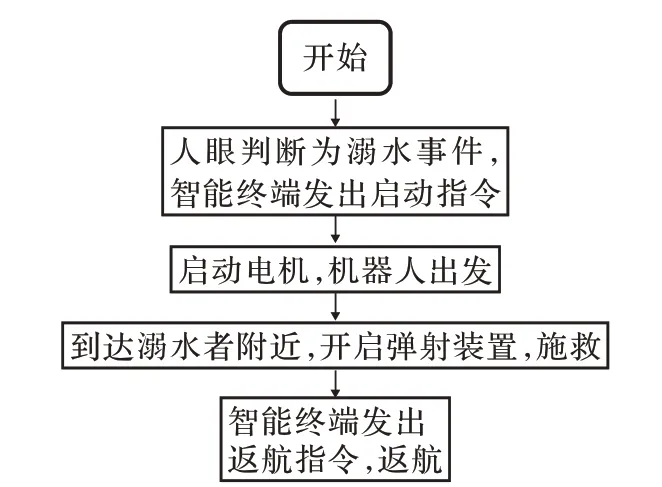
图12 远程遥控辅助模式程序子流程图
4 试验分析
图13 所示测试环境为城市某处湖面,天气条件选择晴天和风雨天气各1 天。甲、乙两人参与试验,甲为模拟施救者,乙穿上救生衣跳入湖中模拟溺水者。在不同的天气条件下相同的地点对远程遥控辅助功能、智能识别溺水者功能、自主避障功能、弹射功能、智能终端显示功能进行多次测试,测试操作步骤和测试结果如表1 所示。测试结果表明,机器人各模块正常工作,系统各模块能有效协调,测试的5 个功能均能够顺利实现,机器人可以高效智能地实现救援任务。为进一步验证救援机器人工作运行的稳定性,进行多次测试。测试地点相同的条件下选取晴天和雨天各1 天,分别测试智能识别模式和远程遥控辅助模式下机器人是否成功实施救援,测试次数50 次,测量结果均为能成功救援,成功率100%,即无论气候如何变化,救援机器人在两种模式下都能有效可靠地实施救援,验证了机器人的稳定性。

表1 水上救援机器人测试各个功能列表

图13 水上救援机器人测试环境
5 结论
本文从功能设计、控制系统硬件设计、控制系统软件设计3 个方面介绍了智能水上救援机器人的设计,并通过试验验证机器人的稳定性和可靠性,结果显示机器人能大大降低救援难度、救援成本和救援风险,具有一定的实用价值和推广价值。后续研究考虑增加倒车功能[9],改进机器识别TODA 算法,增加多种便携智能终端(如手机),以进一步提高机器人救援的成功率。
猜你喜欢
军事文摘(2022年20期)2023-01-10
健康体检与管理(2022年2期)2022-04-15
英语文摘(2021年11期)2021-12-31
小学生优秀作文(低年级)(2021年11期)2021-12-06
医师在线(2021年1期)2021-02-05
语文世界(小学版)(2019年2期)2019-02-24
学生天地(2018年19期)2018-09-07
游泳(2015年2期)2015-03-27
小天使·一年级语数英综合(2014年7期)2014-06-26
游泳(2014年3期)2014-01-19
