
低空无人机航摄遥感测绘技术在测绘领域的应用分析
2022-03-09 07:25黄海鹏
科学技术创新 2022年5期
黄海鹏
(三和数码测绘地理信息技术有限公司,甘肃 天水 741000)
我国目前各个地区的地势变化速度与趋势也在城市化建设步伐逐渐加快的基础上快速提升,这也为相关的测试工作造成极大的难度。且随着现代化科技持续创新发展,各种高新科技的应用也为测绘行业提出了更高的要求。随着测绘需求逐渐复杂化与多样化,传统测绘技术已无法保障测绘质量与效率,现代化测绘技术在社会中受到广泛关注,该技术的支持与使用,不仅有效提升测绘测量的效率和质量,减少时间与资金的成本支出,同时也可更加直观的观察测量结果,保障结果的精准与可靠性,进而全面提升整体测绘工作的质量。
1 低空无人机航摄系统简介与优势
无人机最开始是被应用于军事领域中的一种无人驾驶飞行器,或者是一种无线电遥控模式的飞行器,随着其在20 世纪20年代被发明之后,经过多年的创新与研究,也不断提升其自身的性能和技术水平,应用范围也逐渐从军事领域渗透到民用领域的各个行业中,如通信、气相探测、灾害检测以及农药喷射等方面[1]。将数码相机搭载在无人机上,可以实现遥感平台的建设,进而形成无人机航摄系统。
无人机航摄系统也被称为无人机遥感平台,其属于航空与卫星遥感的有益补充,相比于其他的遥感手段有着其极其独特的优势。无人机遥感平台主要包含低空无人机与固定翼无人机等形式[2]。其中所研究的无人直升机其具备极强的抗风能力、续航时间久、场地要求不高、良好的气动性能和高度的荷载力等优势,在各种任务完成过程中有着十分重要的作用,十分适合长途远距离的航拍任务。而固定翼无人机本身结构十分简单,有着较低的使用成本,在航摄与控制过程中反映十分灵敏,能够获取大比例尺和高分辨率的航摄影像,弥补传统航摄工作的一些缺陷。
2 低空无人机系统组成分析
低空无人机航摄系统由飞行平台系统、地面控制系统和数据后处理系统所组成,各个系统的内部组成详细内容如图1 内容所示。
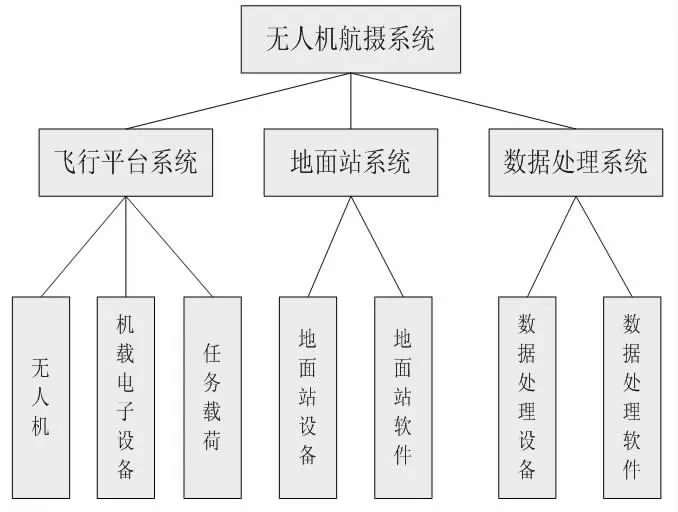
图1 低空无人机航摄系统组成
2.1 无人机飞行平台系统
以固定翼无人机为例,其飞行平台的相关参数如表1 内容所示。
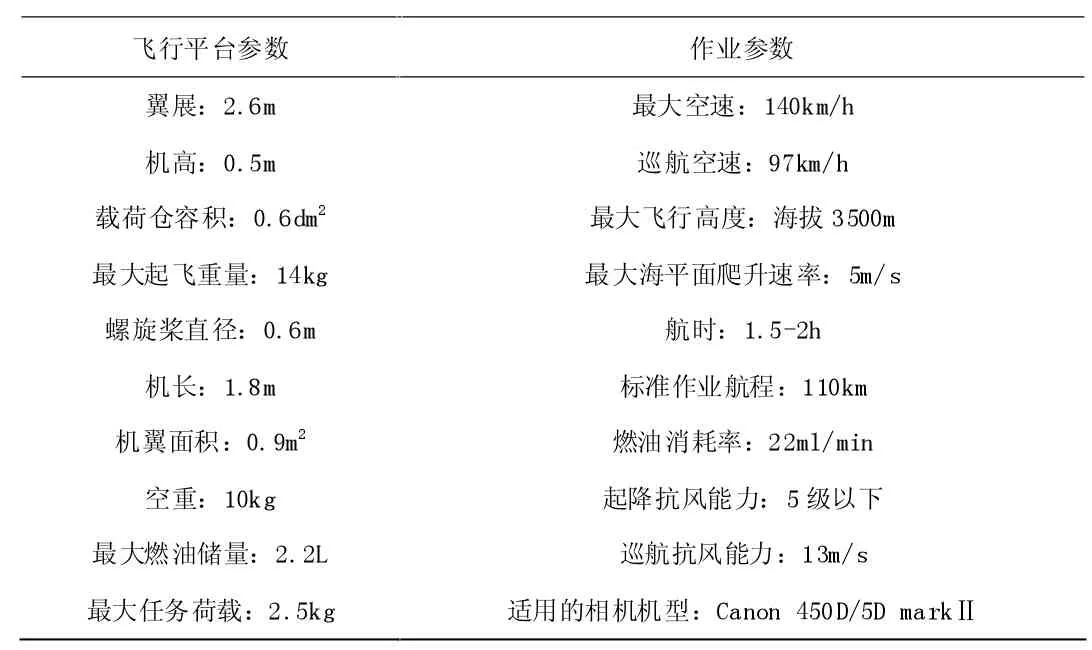
表1 飞行平台相关参数统计
2.2 数码相机系统
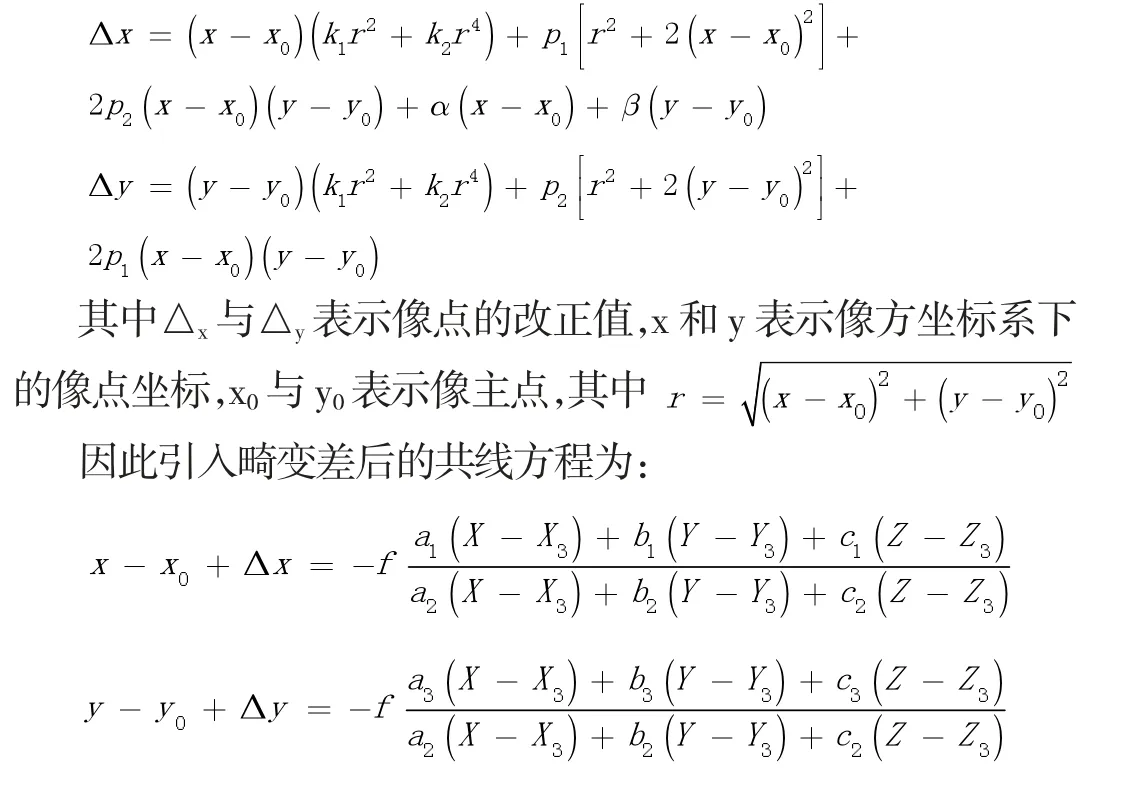
在利用低空无人机进行航摄过程中,所采取的相机主要包含两种形式,分别为非量型与专业量测相机,但是目前在实际应用中,非量测的相机应用十分广泛,但是由于其本身具备像幅度小、畸变差大的关键问题,因此在使用该种类型的相机期间需要对其进行严格校验。
在校验相机机型过程中,检验内容包括主要点位(x0,y0)、主距f0以及光学畸变系数。且在对相机校验过程中都会利用一些特定的参考对象,选择室内与室外校验控制的方式[4]。我们以室外检定场为例,该场地长度约为74.9m,宽度约为26.2m,共有控制点数量421 个,四级高差在5.6m 左右。
其校验的模型为(单位:像素):
3 低空无人机航摄系统与传统摄影测量对比
3.1 摄影比例尺
摄影比例尺是传统胶片相机拍摄期间常用一项内容,该比例尺实施利用H/f 进行计算的,且目前的航拍比例尺和传统之间的关系应如表2 内容所示。

表2 成图比例尺与摄影比例尺之间的关系
通常情况下数码相机与胶片相机相比焦距较小,使用H/f计算得出的摄影比例尺过小,经常性的造成影响误导[5]。同时在相机像尺比因素影响下,使用数码相机拍摄的比例尺实际上大于胶片相机,通常在3 倍左右,为6-15 倍成圈。因此为了防止二者出现混淆的问题,会选的GSD 概念来实现数码相机的拍摄工作。
3.2 空间视野与分辨率,如表3 所示。
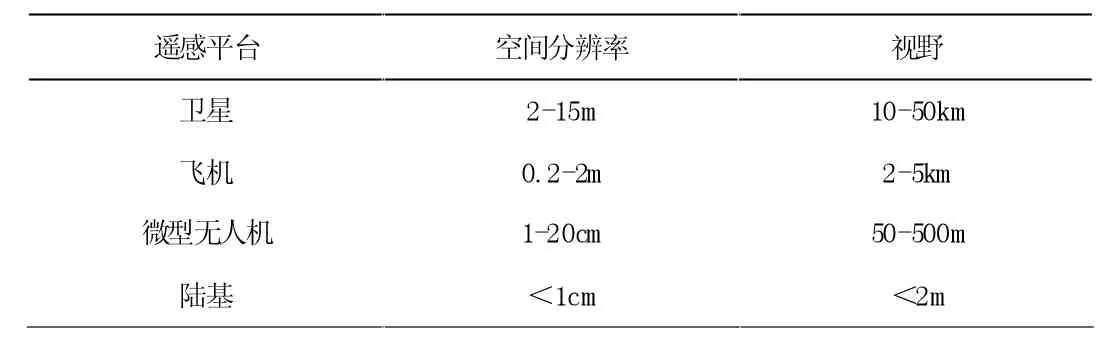
表3 传统遥感平台和微型无人机空间分辨率与视野对比
3.3 低空无人机航摄遥感测绘技术的优势
3.3.1 实现灵活高效的测绘工作。无人机在低空飞行影摄期间,不仅要具备良好的机动性与,同时其有着较高的反映灵敏度,且可自动驾驶,不需要人工参与。所以在测绘过程中选择低空无人机进行航摄,不会受到风霜雨雪等恶劣天气影响,且在一些特殊的环境下也可实现精准的拍摄作业[6]。另外无人机质量轻,在拍摄期间具有较高的灵活性,这样在其降落过程中不需要对其建设专用的场地,安装和调试过程也十分便捷,实用性较强。
3.3.2 实现低空高分辨率的拍摄作业。在使用无人机进行航拍过程中,其所拍摄的资料分辨率较高,在测绘领域中有着十分重要的应用价值,且不会受到过多因素的干扰来保障其航摄精度,在现有的测绘工程中十分受欢迎,所以其利用率也相对较高。另外为人机体积较小,质量轻,航摄作业期间有着十分高度的灵活程度,低空飞行时也不会受到云层的影响,进而使其实际的航摄数据更加丰富和准确,为后续工程控制奠定重要的数据基础[7]。一般在无人机飞行期间,其高度可以控制在50-100m 之间,其所能够测绘的精度也可保持在0.1-0.5m 的范围内。另外在无人机上还搭载了一定的通讯器具,能够利用该通讯设备来将其拍摄的相关数据最终传输到地面的计算机控制系统与中心中,利用相对应的计算机软件来处理数据,得到该地区的实际现状与地质情况,观察其是否能够实现后续工程的建设,其对于测绘数据的利用率提升有着十分重大的意义。
3.3.3 成本支出较低。在目前的测绘工程实施期间,在使用无人机过程中,由于其本身灵活性能较强,同时对于降落场地需求相对较低,因此不需要浪费大量的资金为其建设相关的场地供其降落使用,减少对土地资源的消耗和人力资源的支出。同时基于这种便捷、成本低的优势在各行业中有着十分广泛的应用。在实际航摄期间,其能够抵抗的面积较小,为后续工作效率的提升和航摄结果的精度提升奠定重要数据基础。
4 低空无人机航摄遥感测绘技术的实例应用
4.1 工程概况
某工程为某城市机场高速专线两侧景观优化治理项目,为确保景观优化项目能够高效顺利开展,需要使用无人机航摄技术对高速沿线区域地理信息进行详细测绘,以得到精准真实的地貌地势信息,同时对征地拆迁范围与居民建筑房屋面积等信息进行详细调查分析,为景观优化工程提供真实有效的数据资料参考。该项目正式开展前使用无人机航摄技术进行地质勘探,形成DLG、DOM 以及DEM 数据信息,从而得到分辨率较高、清晰度良好的摄影资料。整个勘查区域划分成A、B、C、D、E五个地块。随后将B 地块划分成六个小地块,将C 地块划分成两个小地块,将E 地块划分成三个小地块。
4.2 设计航线
测绘区域基础数据与采取的设备状况如表4 所示:

表4 测绘区域基础数据及采用设备的情况
4.3 布设像控点及测量
基于本工程的要求与需求,决定选择区域网布设的形式来实现平面像控点的设置,在此期间需要明确的是,所有平面控制点位都选用平均高度控制点位的形式,随后需要详细分析航摄资料所具备的相关条件与其成图的实际精度要求,以此对各像片控制点位之间的跨度、区域、网络大小等数据精确制定。基于本次项目需求与航摄要求,最终选用一对平高点、两条飞行航线以及四条基线,设置4 个控制点位处于两条航线与区域边缘交叉重叠位置,且需要对其控制点的相关范围进行科学处理,布置在像片的中间位置。
4.4 空中三角测量
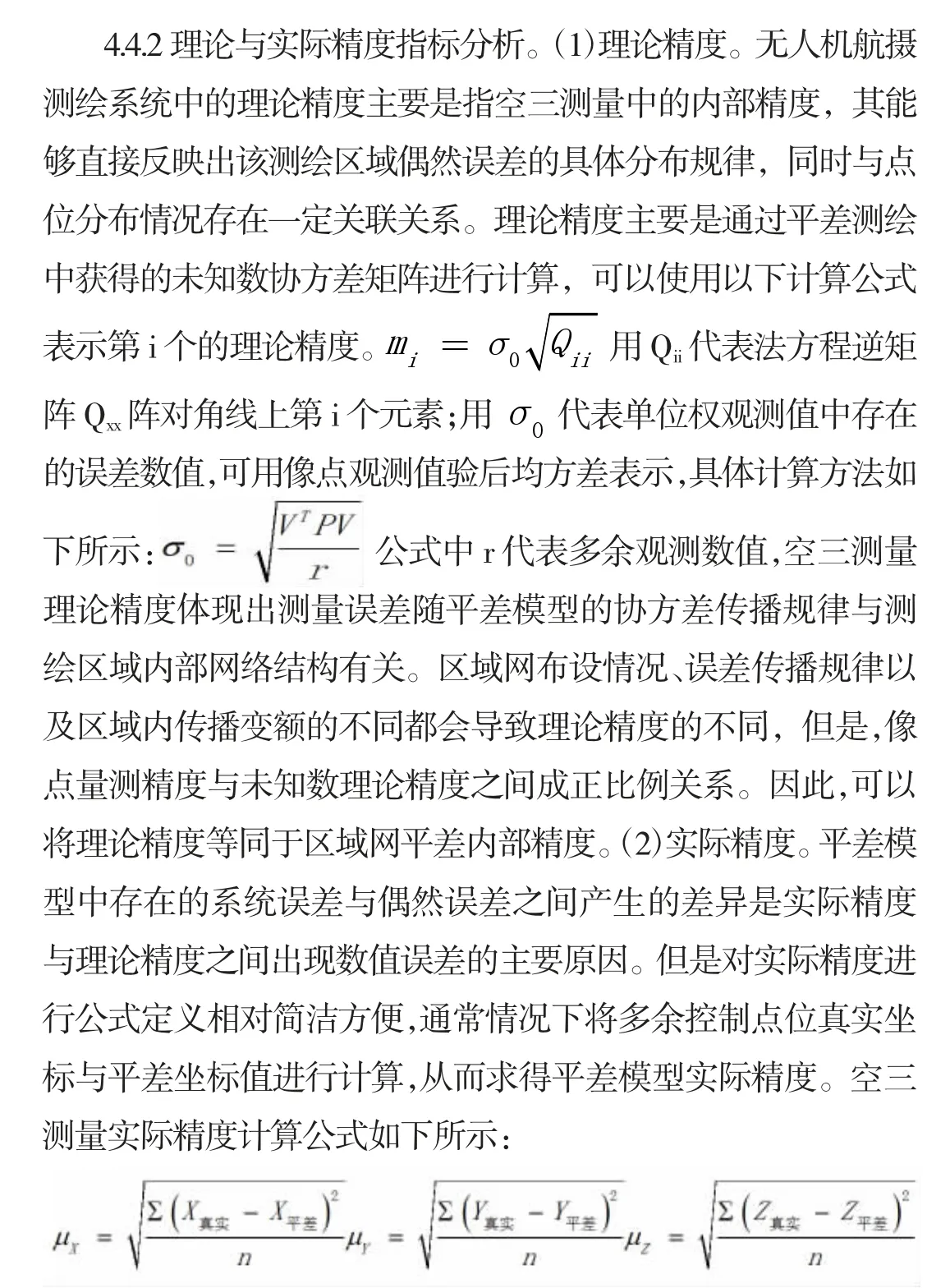
4.4.1 空中三角测量精度指标
低空无人机航摄技术在实际测绘工作中会结合前后方交会从而计算得出加密点或特殊点位的空间坐标,即空三测量法。实际测绘工作中空三测量的点位精确度极其重要,会直接影响到整个测绘工程。空三测量的精确度能够从以下两方面进行分析:首先,从理论角度分析,加密点坐标改正数值能够看成为随机误差数值,依据最小二乘平差函数关系以及协方差公式能够计算出坐标改正数值方差与协方差矩阵关系,从而有效计算出平差精确度。其次,可以将地面测绘数值看成为真实坐标值,通过分析地面控制点位平差坐标值与地面测绘坐标值之间的数值关系,用多余控制点位坐标值代替检查点位与多余观测值,能够有效计算出平差精确度。理论精度主要是指观测对象存在的误差分布规律,误差分布情况会受到区域网的实际网状结构与观测精度等因素影响,通过分许研究误差分布规律能够对控制点位以及网状结构等进行合理科学设计。在空三测量中常使用实际精度数值表示更加贴合事实的测绘数据,从理论角度来讲,当测绘数据不会受到不必要误差影响时,可以将实际精度等同于理论精度。但是在实际测绘工作中实际精度与理论精度会存在一定的数据误差,而不同的精度会导致平差模型以及观测值出现不同类型的误差。因此,测量平差过程中观测多余控制点十分重要。
4.4.3 本工程空中三角测量具体过程分析
本次选择Pixel-Grid 自动系统进行空中三角测量,其中模型连接较差可采取下面公式进行计算。

基于上述公式分析:△代表平面位置较差,单位为m;△Z代表高程较差,单位为m;m像代表像片比例尺分母;fk代表航摄仪焦距,单位为mm;b 代表像片基线数值。在控制像控点平面精度的全部过程中,还需要严格控制其与相邻点位间的误差情况,具体情况如表5 所示。
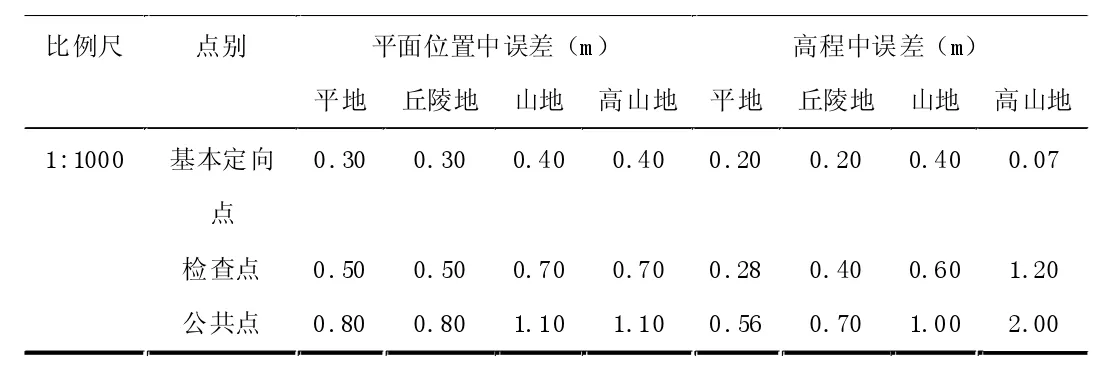
表5 基本定向点与检查点残差、公共点较差最大限值标准数据
在航摄测绘过程中,由于航摄影像会受到居民建筑等因素影响,进而导致部分航摄影像出现相对密集的阴影问题,且房屋建筑具有较多隐蔽性,因此基于现状分析,可以将高程误差精度与平面误差精度分别设置为0.75 倍与0.5 倍[9]。结合本次测量后的结果,能够明确得出测量区域空三测量加密精度,与表5中数据对比能够得出结论,本次测量符合标准。
4.5 处理影像数据
现阶段我国测绘领域常用影像信息处理系统主要包括DPGrid 与Pixel-Grid,结合无人机航摄过程中采集到的大量影像资料,使用专业数据处理软件对相关参数进行专业处理,从而制作DEM 与DOM。在实际工作开展期间,首先需要利用智能数字系统对测绘数据进行匹配处理,同时结合匹配技术获得三维DSM 点云信息数据,随后对相关数据分类归纳与计算处理。但是需要注意的是,测绘结果会受到部分干扰信息影响,因此需要将这些干扰数据剔除后计算DTM,内插获取规格的格网DEM 成果。最后对整个信息资料进行检查编辑,提升整个测绘成果的质量与精度。
5 结论
综上所述,基于上述对无人机的相关特点与优势的分析,本文基于实际测绘工程应用案例探讨低空无人航摄遥感测绘技术的实际应用。本身无人机其具备成本低、灵活性高、精度高等优势,可实现超低空航摄作业,在航摄获得相关地质数据之后,可将其传入到计算机中进行进一步处理,进而提升整个测绘过程与结果的精度与可靠性。基于目前测绘领域的高速发展,低空无人机具有着极大的推广价值。此时则需要相关技术人员,基于目前测绘工程现状分析,不断研究新的航摄技术,不断提升影像精度与数据的准确性,也为测绘工程的未来发展奠定了重要的技术基础。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
建材发展导向(2021年22期)2022-01-18
军民两用技术与产品(2021年10期)2021-03-16
航天制造技术(2020年4期)2020-09-11
建材发展导向(2019年10期)2019-08-24
神州·上旬刊(2018年5期)2018-06-05
证券市场红周刊(2018年37期)2018-05-14
北京航空航天大学学报(2017年9期)2017-12-18
电子制作(2017年9期)2017-04-17
南方文学(2016年3期)2016-06-12
