
冰载荷作用下半潜式平台动力定位能力分析
2022-03-08 02:05汪学锋徐胜文
中国海洋平台 2022年1期
赵 亮,汪学锋,2,李 欣,2,徐胜文,2*
(1.上海交通大学 海洋工程国家重点实验室,上海 200240;2.高新船舶与深海开发装备协同创新中心(船海协创中心),上海 200240)
0 引 言
环北极地区蕴含着丰富的油气资源。美国地质勘探局(USGS)[1]认为北极区域有123亿t原油、47万亿m3天然气和60亿t天然气液的可采储量,其中超过八成位于海底[2]。随着全球气候变暖,北极冰川加速融化,极地海洋勘探、钻采的作业可行性显著提高。适用于北极海域勘采结构物的工程需求愈加强烈[3]。
极区作业的浮式结构通常有破冰船辅助,因此浮式结构大多处于碎冰场中。这意味着浮式结构的定位系统除了抵抗风浪流之外还须承受浮冰的动态载荷,否则结构可能脱离其位置,这对浮式结构的安全与运行有着重要影响[4-5]。为保障结构物自身的安全性能,在极地冰区作业的浮式结构常装备动力定位系统。动力定位能力分析可直观反映结构物在各艏向角抗外力的能力,对冰区作业的结构物进行冰载荷的动力定位能力分析有积极意义。
结构物在碎冰区的冰载荷主要与海冰形状、冰块大小和密集度有关[6-7]。碎冰与海洋结构的相互作用研究有:LAU等[8]讨论采用离散元法(Discrete Element Method,DEM)模拟冰与浮式结构相互作用的可行性;WANG等[7]采用DEM估计锚泊作用下浮式结构的冰载荷,其结果与实尺度测量数据符合良好;季顺迎等[9]和李紫麟等[10]采用DEM模型模拟碎冰与浮式结构物的相互作用,发现海冰对结构的作用力随冰厚、流速、密集度、冰块尺寸的增加而增大;SEO等[11]采用CFD-DEM耦合方法求解浮式结构-碎冰相互作用问题。
本文通过自主编写的MATALB程序研究某半潜式动力定位平台在考虑冰载荷和风浪流载荷作用下的动力定位能力。主要分析在风浪流冰载荷下推进器正常和失效5种工况。将计算得到的各艏向下最大抗风能力绘制成动力定位能力曲线,据此直观观察出定位系统在极地冰区海况下的工作窗口,并对平台的定位能力进行评估,验证推进系统能否满足在极地冰区海况下的正常作业要求,对平台在冰区的作业具有一定的指导意义。
1 坐标系
动力定位能力分析采用右手正交坐标系,x轴指向船首,y轴指向左舷,z轴与xOy平面垂直,方向竖直向上。环境载荷方向α定义为从x轴正向到载荷行进方向的角度,按逆时针测量。因此,沿x轴正向传播为0°方向,沿y轴正向传播为90°方向,沿x轴负向传播为180°方向,环境力矩以逆时针为正。坐标系如图1所示。
图1 动力定位能力分析坐标系
2 考虑冰载荷的动力定位能力分析方法
动力定位能力分析是一种静态分析法,利用推力分配逻辑对推进器的推力大小和方向进行控制和分配,使推进器发出的推力与环境载荷保持平衡,不断变化环境条件,依次得到不同艏向角时满足定位目标所抵抗的最大环境外力,常以最大风速衡量。因此,动力定位能力分析结果的准确性取决于可靠的环境载荷估计和有效的推力分配逻辑[12]。
在设置环境条件时,由于冰与结构物的作用与风浪流有直接关系,因此可将冰载荷设置为与风浪流载荷同向。为充分研究冰载荷对平台定位能力的影响,以15°为步长,计算0°~90°冰向下平台的冰载荷时历曲线,取各冰向下前30%载荷的平均值作为动力定位能力分析的冰载荷,并与风浪流载荷进行线性叠加,作为总环境载荷,输入MATLAB编写的动力定位能力分析程序中进行计算,最后绘出反映船定位能力的动力定位能力曲线[13-14]。
2.1 环境载荷
环境载荷的估算是整个计算的初始条件。环境载荷包括风、浪、流、冰对平台的作用力。在动力定位能力分析中,环境载荷只计算水平面上的力和力矩,即纵荡力、横荡力和艏摇力矩。
2.1.1 风、浪、流载荷
风力的估算可使用CFD方法[15],二阶平均波浪力的计算通常依靠势流软件[16],流力的估算详见文献[17-18]。一般将流速定为恒定值,风速和波浪以相同概率逐渐增加,出于对环境条件的复杂性和安全考虑,计算时风、浪、流方向始终保持一致[19]。
2.1.2 冰载荷
在碎冰与平台的实际作用中,由于海水和空气的存在,碎冰会受到浮力和阻力作用,这直接影响碎冰的运动以及碎冰与平台的作用,因此搭建一个有海水和空气的流体域作为模拟环境是必要的。在流体材料处理中,需同时对本构模型和相关状态方程进行设置[20],即在LS-DYNA中通常先使用空白材料模式(MAT_NULL)描述空气、海水等流体的行为,再通过状态方程(EOS_OPTIONAL)进行参数设置。
空气的状态方程为EOS_Linear_Polynominal,表达式为
(1)
式中:Pair为空气压力;C0~C6为材料相关因数,对于空气来说,C4=C5=0.4,其余为0;μ0=1/V-1,V为相对体积;E0,air为单位体积空气的初始内能,取E0,air=2.533×105Pa。
海水的状态方程为EOS_Gruneisen,表达式为
(2)
式中:Psea为海水压力;ρ0为海水密度;C为冲击波速度;μ1=ρ/ρ0,ρ为压缩后的海水密度;γ0为常数;a为γ0的一阶体积修正值;S1~S3为冲击压力传播过程的相关因数;E0,sea为单位体积海水的初始内能。对于海水,C=1 480 m/s,S1=2.56,S2=-1.986,S3=0.226 8,γ0=0.493 4,a=0.47,E0,sea=0 Pa。
为提高计算效率,冰载荷数值模拟在缩尺比为1∶50的碎冰场中进行。根据北极多年统计数据,海冰平均厚度为(2.562±0.894)m[21-22],形状以多边形居多。不考虑冰的破碎,冰模型均采用规整的六面刚体结构,用以模拟尺寸为1~2 m厚、长和宽为15~30 m的碎冰。在移动速度为1 m/s的冰场,在0°、15°、30°、45°、90°的迎冰角下对平台进行数值模拟。
在各迎冰角下的冰载荷时历曲线如图2所示。在若干个迎冰角下平台受到的平均冰力和30%平均极值如图3所示。由图3可知,2种统计结果的变化趋势一致,在0°和30°迎冰角下平台分别受到最小和最大的冰载荷。为保证动力定位能力计算的可靠性,选取各方向下30%平均极值作为冰载荷计算数据。根据平台的对称性,将上述角度的冰载荷进行线性插值,得到0°~180°的冰载荷。最后将冰、风、浪、流同向线性叠加作为环境载荷。
图2 平台在各迎冰角下受到的冰载荷时历曲线
图3 迎冰角与冰载荷之间的关系
2.2 推力分配逻辑
推力分配的目标函数是最小能量消耗。由于推进系统是过驱动系统[23],约束条件是推进器的推力限制[24-25],因此推力分配问题为约束优化问题。关于最优化的算法有很多,其中,经过大量研究的二次规划方法被证明是有效的和高鲁棒的[26]。本文采用二次规划方法求解推力分配问题。
2.2.1 推力平衡方程
在动力定位能力分析中,主要考虑水平方向上3个自由度的载荷,因此推进器产生的推力须平衡船舶在这3个自由度上受到的力和力矩。若1艘船舶装备m个推进器,则推进系统产生的推力与环境力满足如下平衡方程:
(3)
式中:Fx为纵荡力;Fy为横荡力;Mz为艏摇力矩;Ti为各推进器产生的推力大小;θi为各推进器推力方向;第i个推进器在水平面的位置坐标为(lxi,lyi)。
2.2.2 数学模型
直接求解式(3)会得到数个解,推力分配的目标就是在多个满足与环境力平衡的解中尽可能找到最优的一个,以使平台的动力定位系统消耗的总能量最小。由于采用二次规划的方法来求解,要求约束函数需为线性,因此对约束条件进行线性化处理得到:
(4)
式中:目标函数为总推力消耗;推力向量u=(Tx1…TxmTy1…Tym)T是1个2m×1的列向量;W为每个推进器的能量消耗系数;等式约束为线性化后的平衡方程;B为平衡系数矩阵;τ为环境载荷矩阵;不等式约束表示推进器的物理限制;系数矩阵A=[A1…AmB1…Bm]T,列向量b=[T1,max…Tm,max… 0]T,其中,A1~Am为每个推进器的推力约束系数,B1~Bm为每个推进器的转角约束系数,列向量b包括每个推进器的最大推力Tmax。
3 算例和结果
以1艘装配6个全回转推进器的半潜式平台作为研究对象,平台主要参数如表1所示。全回转推进器具有相同的参数,最大功率为5 500 kW,最大敞水系柱推力为960 kN,各推进器位置坐标如表2所示,由于推进器布置间隔较远,互相影响较小,因此全回转推进器不设置禁止角。由于推进器布置关于中纵、横剖面对称,因此单个失效模式下只考虑推进器T1、T2失效,组合失效模式考虑T1&T2、T1&T4失效,推进器失效工况如表3所示。风力、流力系数采用模型试验的结果,流速设定为1 m/s。二阶平均波浪力通过势流软件计算得到。
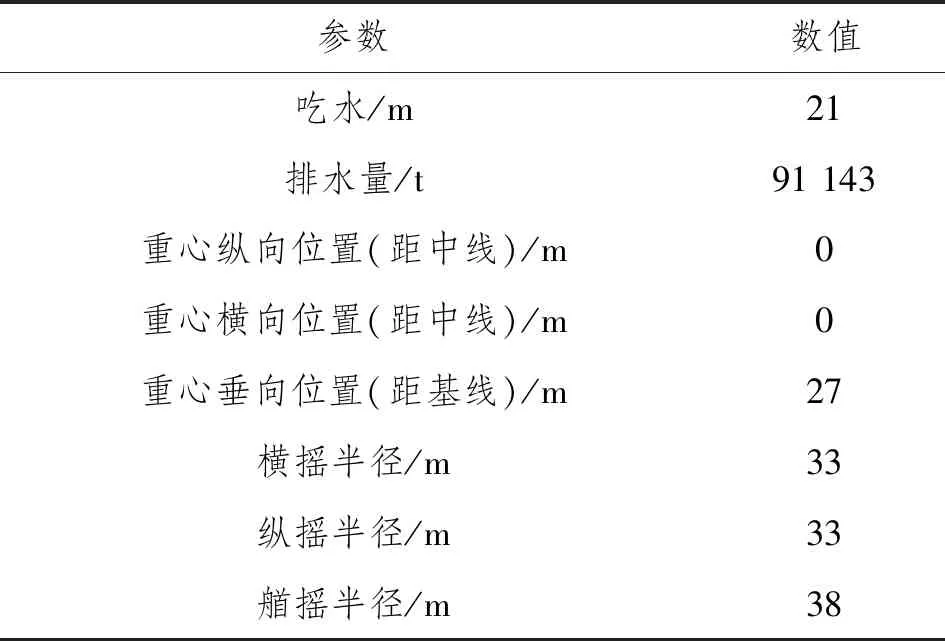
表1 半潜式平台主要参数
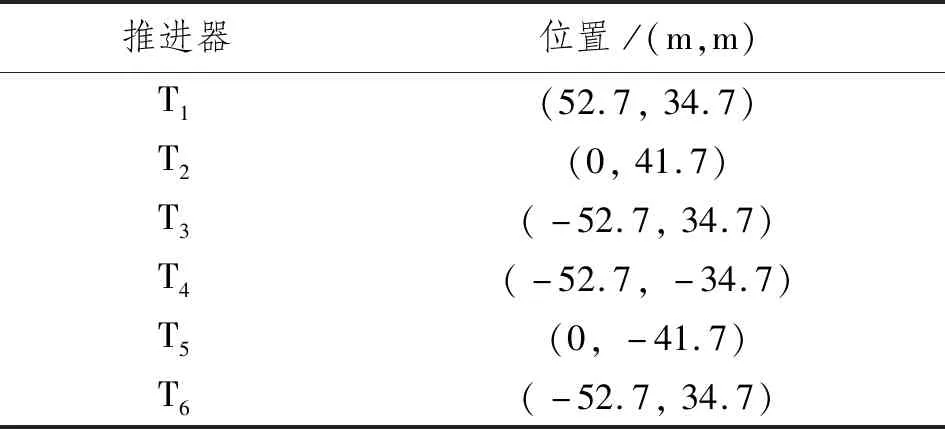
表2 推进器位置
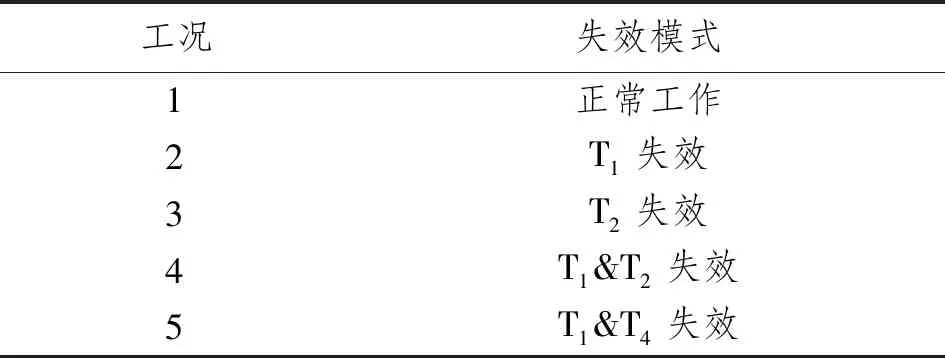
表3 推进器失效工况
不同工况下平台动力定位能力曲线如图4和图5所示。
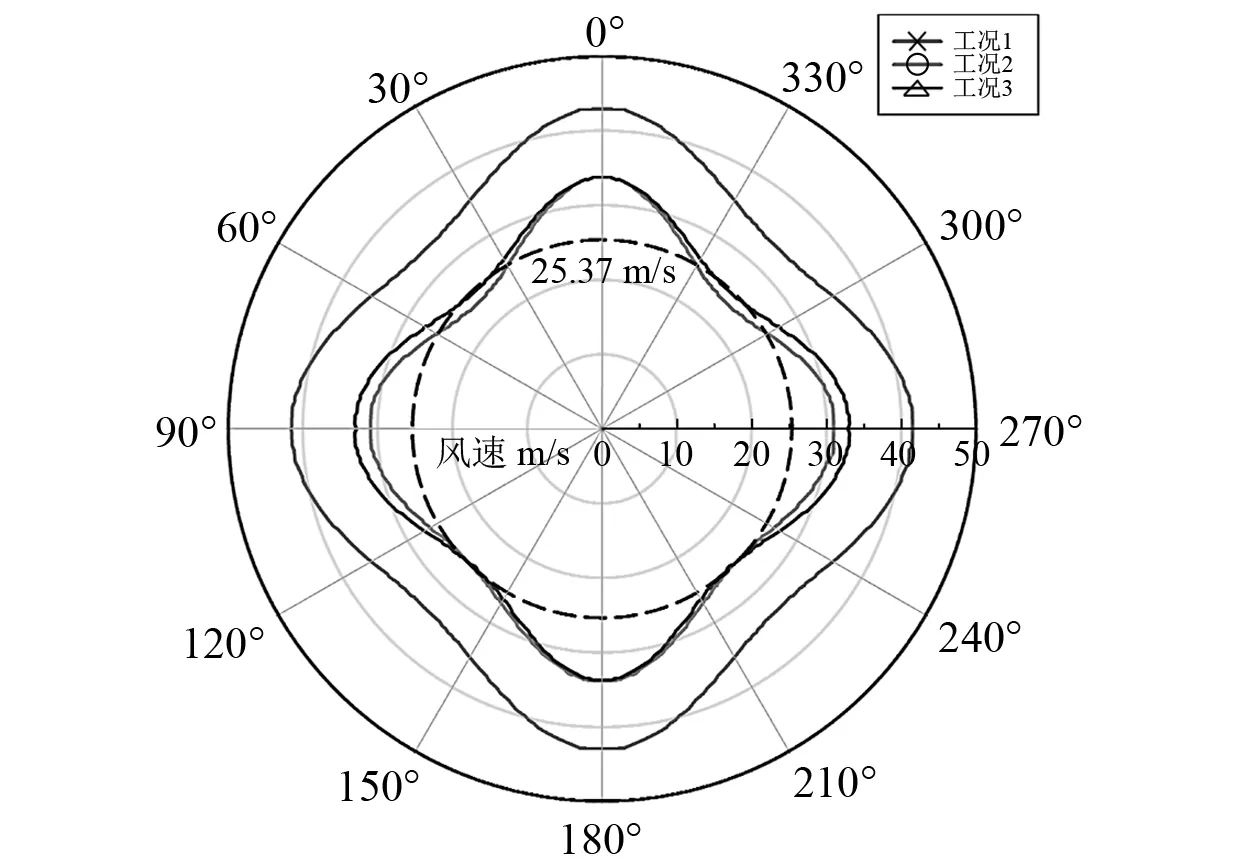
图4 工况1~工况3冰、风、浪、流载荷作用下动力定位能力曲线
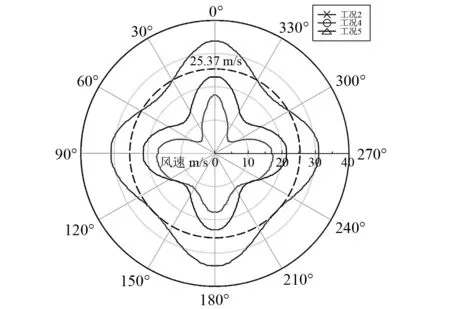
图5 工况2、4、5,冰、风、浪、流载荷作用下动力定位能力曲线
由图4可知,在推进器均正常工作(工况1)下,由于平台和推进器布置关于x、y轴对称,动力定位能力曲线近似原点对称。由于全回转推进器可旋转至任意角度,因此各艏向下的动力定位能力较为均衡。由于平台在区间[30°,60°]和[120°,150°]内受到的冰载荷最大,因此动力定位能力在该区间有小幅减小。当单个推进器出现失效时,与正常工况相比,平台动力定位能力削减近20%。另外,由于推进器T1距平台重心较推进器T2更远,且推进器T2位于中横剖面,推进器T1失效(工况2)所能提供的推力力矩略小于推进器T2失效(工况3),因此面对[30°,150°]的环境载荷,工况2的动力定位能力略差于工况3,而在[-30°,30°]内2个工况的动力定位能力基本相同。
组合推进器失效工况是在推进器T1失效的情况下同时出现其他推进器失效的工况。由图5可知:组合失效工况下的动力定位能力损失相较于推进器T1失效工况下的损失明显增大;在组合失效中,工况5的结果优于工况4,即T1&T2推进器失效的动力定位能力最差,这是由于推进器T1&T2所能提供的推力力矩小于推进器T1&T4;尤其在[30°,60°],工况4动力定位能力极弱,平台处于危险状态。因此,应当避免推进器T1&T2在同一配电板上。
工作海况下对应的风速为25.37 m/s,工况1在各艏向下的动力定位能力完全满足要求。但当单个推进器失效,平台斜侧向应对载荷时,动力定位能力不能完全满足工作海况,观察得到单个推进器失效时的作业窗口为[-30°,30°]和[150°,210°],应避免平台斜侧向的定位情况。当有2个推进器同时失效时,平台在任意艏向下的定位能力均不能满足工作海况,平台应迅速撤离工作海域,尽快完成修复。
4 结 语
采用LS-DYNA软件构建碎冰场,并模拟平台在碎冰场中受到的冰载荷。将冰载荷纳入环境载荷条件,通过自主开发的动力定位能力分析程序对某冰区半潜式平台在不同推进器失效工况下的动力定位能力分别进行计算并分析,得到如下结论:
(1)在冰、风、浪、流载荷同时作用下,冰载荷在艏向区间[30°,60°]和[120°,150°]内较大,平台在推进器均正常工作情况下的动力定位能力完全满足工作海况的条件,且最大抗风能力为42.89 m/s。
(2)推进器失效对动力定位系统的总体定位能力有一定的负面影响。距平台重心越远的推进器失效对动力定位能力的削弱越显著,即对整体定位能力的贡献最大,因此,对T1、T3、T4、T6推进器的安全应引起更多的重视。对于单个推进器失效,平台的作业窗口为[-30°,30°]和[150°,210°]。对于组合失效,平台的动力定位能力不能满足工作海况的条件,当出现这种情况时,平台应及时撤离该海域。
(3)当平台进入有碎冰区的极地海域进行动力定位作业时,应根据该海域的观测统计资料找出该海域碎冰的尺寸、移动速度和漂流方向,分析该平台的动力定位能力,尽可能调整平台艏向,使其与该海域碎冰的主要漂流方向一致,使平台在遇到碎冰区的情况下仍具备正常动力定位作业的能力。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
造船技术(2022年3期)2022-08-09
船舶力学(2022年1期)2022-02-10
党员生活·中(2021年8期)2021-08-30
舰船科学技术(2021年12期)2021-03-29
兵器装备工程学报(2019年11期)2019-12-03
建材发展导向(2019年10期)2019-08-24
振动工程学报(2019年2期)2019-05-13
当代陕西(2018年12期)2018-08-04
