“制造装备及自动化”课程实践教学尝试*
2022-03-07 05:53尹晓珊钟建琳彭宝营王鹏家
南方农机 2022年5期
尹晓珊 ,钟建琳 ,彭宝营 ,王鹏家
(北京信息科技大学机电工程学院,北京 100192)
0 前言
“制造装备及自动化”是机械设计制造及自动化专业的一门专业基础课,这门课程涉及“机械设计”“机械原理”“工程制图”“机械制造技术基础”等基础知识,内容更加丰富,综合性更强[1]。通过本课程的学习,学生能够了解制造装备的分类、装备设计的评价;了解工业机器人的机械结构、自动生产线的组成;掌握金属切削机床的基本理论、机床夹具设计的基本方法、机械加工生产线总体设计等[2]。目前,很多学校开设的“制造装备及自动化”课程还是以传统教学为主,课程的教学重点还是在理论知识方面,新方法、材料和工艺这三方面基本不涉及,注重传统理论知识的介绍[3]。加上本课程课时较少,但书中的理论知识偏多,教学课时明显不足[4]。教材知识较传统,教学中缺少对国内外相关技术发展的介绍,学生的知识存在缺失,导致在遇到实际问题时可能因没有掌握最新知识而迷茫[5]。另外,教学形式单一,本身课程的理论知识就偏多、知识较抽象,传统的老师讲学生听的模式,会使师生互动减少,课堂枯燥[6]。即使课程分配了6个学时的实践环节,但一般为加工中心主轴误差实验、加工中心几何精度检测、组合夹具拆装实验等验证性实验,验证性实验对学生实际操作能力和创新能力的影响不大[7]。国家提出“中国制造2025”“互联网+”等,要求学校培养的机械类学生不仅要掌握理论知识,还应该是创新型、应用型的人才[8-9]。因此,对本课程的实践教学改革进行尝试。
课题组以金属切削机床设计中并联机床的并联运动原理和应用为例,通过教师给定设计要求,学生分组合作,先用学生之前学过的SolidWorks建立三维模型进行装配,运动仿真路径无误后进行实际装配。本次实践操作不仅能让学生明白并联机床与传统机床的不同,而且还能锻炼学生对所学知识的综合应用能力及动手能力。
1 实践演示平台介绍
1.1 教学内容
机械类的知识,有较强的逻辑性和抽象性,概念内容琐碎枯燥,本课程涉及的要记忆的知识也很多。将理论与工程实践相结合,学生自己去设计、动手操作,通过直观的教学实物模型让学生对抽象知识有具体化的理解,让学生更好地接受知识,喜欢上这一门公共基础课。因此,以课程中提到的并联机床为例,结合三维建模软件SolidWorks和并联机构,从建模、装配、运动仿真到实物装配建立教学演示平台。
1.2 SolidWorks三维建模软件
SolidWorks功能强大,操作便捷,可以满足不同领域人的使用需求,它广泛应用于汽车、机械、航空业等领域。它的优点体现在以下几方面:有中文操作界面,无多余的对话框,保持原来CAD用户从二维到三维设计的作图习惯;零件设计上,使用特征绘图,工具栏中包含常用的拉伸、切除、扫描、旋转、孔、圆角等功能,能较快掌握并且进行特征建模,对于曲面和管道建模更加简单和方便;装配设计方面,可以动态地查看装配体的配合关系,快速测量距离,能直接打开单个零件进行修改,对于复杂的模型能快速进行总体装配,提高效率;运动仿真方面,能直接模拟机械机构的运动,直观看出是否存在零件间的干涉,为实际应用节约了时间和金钱;其特征模板为标准件和标准特征,用户可以直接从特征模板上调用标准的零件和特征,零件保存格式多样,并且能打开不同格式的零件,方便进行资源共享;它提供了生成完整的详细工程图的工具,而且工程图是相关联的,当人们修改图纸尺寸时,三维模型、各个视图、装配体都会自动更新;此外,还有标准零件库,里面包含丰富的标准件、高级渲染功能,可选择零件的材料和外观颜色,能够使三维模型更加逼真。
1.3 并联机床
传统机床是由床身、立柱、主轴箱、刀架、工作台等部件串联而成非对称的布局形式,因此称为串联机床,这种机床布局作业范围大,灵活性好。随着机械行业的发展,机床面临进一步高速化、高精度化的挑战,随着国家对制造业的重视与投入,机床设计中开始应用并联运动原理。最早问世的是20世纪90年代美国公司生产的“VARIAX”虚拟轴机床。它是一种六个运动并联的设计,设计的原则是让轻者运动,重者不动或者少动[10]。传统机床与并联机床的对比如图1所示。
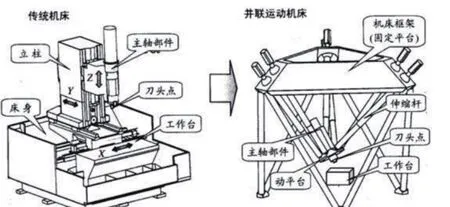
图1 传统机床与并联运动机床对比图
并联机床和传统机床有很大的差异,它的上下平面取代传统机床的床身和立柱,上平面可以带动主轴和刀具运动,下平面固定不动,可以固定加工零件;上下平面之间由几根可以自由收缩的杆件相连,杆件和上下平面之间可以采用球铰连接;杆件的运动可以由伺服电机和滚珠丝杠驱动,带动上平面进行运动,达到加工工件的目的。传统机床一般为X、Y、Z三个进给运动的机床,而并联机床中存在等效运动,因此并联机床又称虚拟轴机床,它具有很多优异的性能,但确定具体的运动位置比较复杂。根据自由度的不同,可以分为三自由度并联机构和六自由度并联机构,它们都去掉床身、立柱等质量重的零部件,因此机构速度高、质量小、精度高、各分支运动误差不累积,但工作空间小,尤其是回转运动范围小,并且杆件间容易干涉,运动算法复杂。并联机床的运动原理和并联机构的运动原理相同,因此课题组选择典型六自由度并联机构为实践对象。
2 实践教学环节设计
2.1 分组合作
课程内容重点讲述了传统金属切削机床的设计、机床夹具和自动化装配线的设计。本次实践环节的并联机床,与传统机床设计原理有所不同,其中涉及的知识比较多,因此让学生们分小组合作进行。老师给定六自由度并联机构相关参数,小组成员自行分配任务,这样不仅能让每一个学生都参与其中,也有助于促进学生之间的互助和沟通。
2.2 SolidWorks三维建模及装配
需要学生们查阅相关文献,按照老师所给的参数设计并联机构的三维零件模型。并联机构由上下平台、电动缸、球铰等相连接而成,因此先使用SolidWorks建立各个零件的三维模型,首先是上下平面模型的建立,需要确定平面的直径和拉伸的厚度;其次是电动缸零件的三维模型,它的作用是提供动力,带动杆件进行来回收缩,使其具有不同的运动空间姿态,因内部结构复杂,本示例只保证外观尺寸准确和外形一致;最后是球铰,它连接平面和杆件,一般球铰能够360°旋转,但在本次示例中,因6个杆同时进行运动,空间范围有限,很容易造成位置干涉,因此限制球铰的运动范围是±15°,完成这项操作需要用到SolidWorks的高级约束。为了让零件更加真实和美观,对零件进行倒圆角处理,添加对应材料和外观颜色,必要时可以进行SolidWorks渲染。
创建一个装配体,按照所给定的位置关系进行装配。正确使用点、线、面之间的配合要求,如重合、同轴心、相切、垂直等,考虑各零部件之间的定位关系,装配过程中,首先要确定好基准面,固定六个自由度保持下平面不动,然后参照实物图,如图2所示,从下往上依次装配。在装配过程中,有两个问题需要注意:一是当上下平面平行时,杆一定是处在中点位置,此时各杆的伸长量是一致的,该杆的长度是使用Matlab软件进行运动学位置反解得到的,本次装配参数已给;二是上球铰、运动缸中杆和下球铰的中心处在同一条直线上。最终完成的六自由度并联机构三维装配体如图3所示。

图2 六自由度并联机构实物图

图3 六自由度并联机构三维装配图
相对来说,学生对三维建模的兴趣浓厚,因此,三维建模和装配环节有助于提高学生的思维创新能力,激发学生学习兴趣。
2.3 动手实践与总结
每一个小组完成虚拟装配和运动仿真,老师检查运动仿真无误后,可以进行实际装配。在实际装配过程中,学生会注意思考装配的原则、定位方式和顺序。当小组成员完成装配后,老师进行小组指导,根据实际情况给出相应建议。课程结束后,让学生们以小组为单位上交实践报告,报告内容应包括并联运动机床的原理、零件建模和装配的主要步骤、实际装配中遇到的问题和解决方法,以及每一个成员的总结与感想。
通过本课程实践活动,将所学的理论知识应用到工程中,在实际装配中能发现问题并且解决问题,不但增强了学生们相互合作的精神,而且让学生们都有机会参与其中,为以后进入社会、走向工作岗位奠定了基础。
3 结论
1)教师课上讲授新的理论知识,学生课下自己练习操作,有助于学生更好地掌握新知识,实践后发现问题能与同学一起讨论,或与老师交流反馈,师生互动增加,学生学习的主动性增强,教学效果更好。
2)有助于培养机械类学生工程素养。工科学生不仅要具备丰富理论知识,还要有一定的动手和解决实际问题的能力,理论学习和动手实践缺一不可。
3)本次实践,学生通过并联机床的原理学习、零部件的选型及设计、三维建模、虚拟装配、运动仿真、实际装配等一系列过程,不仅掌握了本课程涉及的新知识、提高了装备设计能力,还增强了学习兴趣。
猜你喜欢
中国设备工程(2022年12期)2022-07-11
中学生数理化·中考版(2021年10期)2021-11-22
智能制造(2021年4期)2021-11-04
新世纪智能(数学备考)(2021年5期)2021-07-28
汽车零部件(2019年7期)2019-08-16
中学生数理化·高三版(2019年1期)2019-07-03
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
试题与研究·高考数学(2016年1期)2016-10-13
中国市场(2016年45期)2016-05-17