融合定位及三维激光扫描技术获取地下空间数据的应用研究
2022-03-06 01:07李照永侯至群何江龙陈厚元
城市勘测 2022年1期
李照永,侯至群,何江龙,陈厚元
(昆明市城市地下空间规划管理办公室,云南 昆明 650041)
1 引 言
针对城市地下空间的三维信息获取,传统数据获取技术手段工作的效率低、人工成本高、细节数据获取困难、三维数据需要后期转化、普查成果资料的后期深度利用与潜在价值的挖掘较困难。为了有效拓展地下空间数据内容、提高数据获取效率;探索一种高效、高精度、全要素的地下空间三维信息获取方案成为当前研究的重点[1]。
室内空间下的定位和授时长期以来是世界性的技术难题,GNSS导航定位不适合在室内空间下或高楼密集区作业;IMU惯导系统通过积分获得自身的轨迹,短距离精度高,随着距离增长积分产生的误差增大,SLAM技术在特征信息丰富的场景,易于测量,适合建筑物密集的城市中心或地下空间场景。而地下空间信息往往与地面存在连接,不但要获取地面连接部分,同时还需要获取地下部分,所以:GNSS & IMU & SLAM融合定位导航,三者可以互补,结合当前较成熟的三维激光扫描技术是获取地下空间数据的理想方案。广大研究者及各大测绘及相关设备研发机构也在积极进行此类研究,但成熟稳定的解决方案仍然甚少。截至目前,在GNSS & IMU & SLAM高度融合集成技术上,Pegasus:Backpack移动背包扫描系统仍然处于领先地位,作为一项高新技术的出现,由于设备系统的在场景应用时要求背负作业人员结合现场情况实时控制系统的运行,对作业人员实时分析场景情况有较高的技术要求,加之价格昂贵、国内保有数量稀少,导致应用水平无突破,主要应用于地面相关工作中,地下或室内应用成熟方案甚少。项目分别通过实例研究了系统在地下空间数据获取过程中的关键工作要点、影响因素及优化措施、点云数据紊乱及分层现象的处理方法等。
2 系统原理及核心技术
2.1 系统原理
Pegasus:Backpack移动背包扫描系统集成了定位定姿系统和数据采集系统,高度集成融合了GNSS & IMU & SLAM技术,系统配置了5个相机和2个三维激光扫描仪,将测量轨迹与三维点云、全景照片融合起来[2],可生成指定空间坐标系统的三维彩色点云数据,数据可应用于GIS信息的提取、模型设计等方面,还可在全景影像上进行测量、提取地物特征等操作。
2.2 GNSS技术
目前国际上可用的卫星导航定位系统(GNSS)有:美国的GPS、俄罗斯的GLONASS、中国的北斗(COMPASS)、欧洲的GALILEO。随着四大卫星导航定位系统的发展[3],特别是北斗进入全面组网建设阶段,使得GNSS多星座组合导航定位技术得到较快发展,研究使用的扫描系统,充分利用了多星座组合导航定位信息,内置了各星座坐标框架和时间系统统一转换模块及方法,实现了多星座组合导航定位功能[4]。
各大卫星系统的导航定位原理基本相近,即:通过卫星的星空位置、卫星与GNSS接收机间的空间距离,采用空间后方交会方法得到接收机位置[5]。要实现这一目的,可以在卫星星历中查出星载时钟所记录的时间结合卫星轨迹求出卫星的星空位置[6],再依据卫星信号传播至接收机的时间即信号传播速度得到GNSS接收机到卫星的空间距离[7],由于信号传播过程受电离层、对流层等相关因素干扰及卫星和接收机钟差影响,所求的这一距离并不是接收机与卫星之间的准确空间距离[8],我们通常称为伪距。通常要求接收不少于4颗卫星的信号来计算求取GNSS接收机更为准确可靠的位置信息,以消除卫星及接收机钟差等相关因素影响,通过建立电离层、对流层改正模型减弱对空间距离的影响,多星座组合导航定位功能有效增加了卫星数量,并很好地增强了卫星星座的几何图形强度。
2.3 INS技术
惯性导航系统(Inertial Navigation System),即INS技术是一种利用陀螺和加速度计测量载体角运动和线运动[9],经过积分运算求出载体瞬时姿态、速度和位置的导航技术[10]。它完全依靠自身的敏感器件完成导航任务,无须依赖任何外界信息,也不向外辐射任何能量[11],是一种完全自主的导航系统,具有数据更新率高、短期精度高和稳定性好的特点[12]。惯性导航体系归于推算导航方法,即从一已知点的方位依据连续测得的运动体航向角和速度推算出其下一点的方位[13],因而可连续测出运动体的当前方位。
惯性测量单元简称IMU,是测量物体三轴姿态角(角速率)及加速度的装置。陀螺仪和加速度计,是惯性导航系统的核心装置[14]。借助内置的加速度传感器和陀螺仪,IMU可测量来自三个方向的线性加速度和旋转角速率,通过解算可获得载体的姿态、速度和位移等信息。系统集成融合了GNSS、INS技术,形成组合导航模式[15]。
2.4 SLAM技术
SLAM技术(Simultaneous Location And Mapping),最早由Hugh Durrant-Whyte和John J.Leonard提出,又称为实时定位与地图构建,一般包括:特征提取、数据关联、状态估计、状态更新、特征更新等部分内容,主要解决自身的实时定位与地图构建问题。理论模型如图1所示,当设备系统运动时,系统传感器对空间位置的变化进行感知与观测[16],实时将特征点位置、系统移动距离及向前移动观测所得的特征点空间位置相结合,得到系统瞬时位置与所处环境信息。实现了在无GNSS信号的环境下进行位置测量,将它与移动测量相结合实现了场景特征复杂的环境下地理信息数据的获取。在地下空间数据的获取工作中较为适用。

图1 SLAM技术理论模型
3 研究过程及结果分析
3.1 研究方法及流程
典型研究方法有:模拟法、观察法、试验方法、经验总结法等,结合本次研究目的及特点,使用的是试验方法和经验总结法。试验方法是获取第一手科研资料的重要和有力手段,大量的、新的、精确的和系统的资料,往往是通过试验而获得的,有许多科学理论和技术的正确与否都是通过实验的方法才能得到验证。所以说试验法是科研工作中非常重要的一种方法。经验总结法是通过对实践活动中的具体情况,进行归纳与分析,使之系统化、理论化,上升为经验的一种方法。
研究工作流程主要包括6个部分:项目准备、实验场地调研与选择、数据获取方案设计、数据获取与处理分析、实例验证分析、成果检验及应用。流程如图2所示:

图2 研究工作流程
3.2 数据获取方案设计
3.2.1 软硬件配置
(1)采用软件主要有:徕卡背包式三维激光扫描系统配置的Leica Infinity、Inertial Explorer、Pegasus Manager软件及GNSS多星座接收机配备的静态数据处理软件等。
(2)采用硬件主要有:Leica Pegasus:Backpack背包式三维激光扫描系统一套、2秒级站仪一台、多星座GNSS接收机3台套、图形工作站2台。
3.2.2 数据获取技术路线及处理流程
以GNSS & IMU & SLAM融合定位技术、三维激光扫描等技术为基础,参考现行测绘相关标准以及有关规定,通过三维激光扫描系统传感器主动的、非接触的方式获取地下空间相关要素的数据,实现高效的、高精度地采集地下空间相关要素三维信息、要素细节信息,获取处理流程如图3所示:
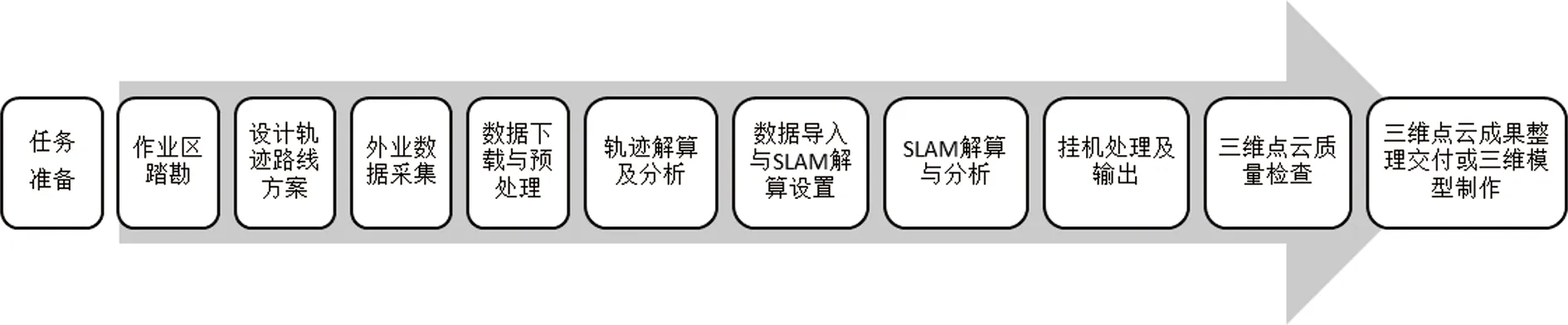
图3 数据获取处理流程
3.3 数据获取与处理
3.3.1 数据获取
(1)基本要求
进行数据获取前先对设备进行各项检查及相关参数的配置并进行调试,对作业区进行踏勘,设计详细的轨迹路线,开始采集数据前严格依据操作方法进行系统的初始化及惯性导航纠正;作业过程中遵循重复扫描、遵循盲区最小化原则、移动物体进入有效扫描范围时暂停扫描、匀速慢速、行走姿态相对稳定等原则。结束作业后,及时将获取数据下载并导入存储设备,并检查基准站与背包数据的时间吻合情况及点云数据覆盖范围完整性,对出现异常的数据,及时处理。
(2)获取方法模式及步骤
系统设计作业方法模式:pure SLAM(纯SLAM)、fused SLAM(融合SLAM)。研究主要采用fused SLAM方法模式,此方法模式的导航定位工作原理为:地面对空条件良好且能有效锁定卫星信号环境采用GNSS的差分定位技术,通过基准站与背包间单基线解算获得背包的瞬时空间位置;对空条件不良或者有效锁定卫星颗数少于4颗时,启用IMU惯性测量单元辅助导航定位;地下或室内环境系统不能接收卫星信号、IMU惯性测量误差积累过大启动SLAM导航定位。数据获取主要包括:控制点布设、检查点数据获取;GNSS基准站架设、背包姿态矫正;多模式、多行走路径的数据采集;数据整理与处理。
3.3.2 数据处理与分析
(1)数据预处理
将基准站数据导入GNSS接收机随机配套的静态数据处理软件,导出Rinex数据,并将此数据拷贝至背包系统数据获取工程文件的master目录下。再将背包系统数据、基准站数据通过Inertial Explorer软件进行数据转换,检查数据的包含关系、基准站获取数据的卫星观测情况等必要解算条件。
(2)数据处理
主要包括:轨迹解算、数据导入及处理参数设置、SLAM解算、点云及全景照片生成等。使用Inertial Explorer软件解算轨迹时,应结合GNSS建态数据处理的基线解算原则和要求进行单基线解算,轨迹解算完成后查看组合导航定位的模式效果并选择最优组合导航定位模式数据成果。SLAM解算及点云数据等处理在Leica Pegasus manager软件完成,包括:导入轨迹数据的参数设置(Import trajectory data);生成三维点云设置(Generate 3D point cloud);导出点云设置(Export Las files);点云数据成果挂机处理与输出等。
(3)数据研究分析
由于这种技术方案无成熟经验借鉴、可见文献稀少,研究团队利用了GNSS技术、惯性导航技术、SLAM技术、控制测量及细部测量理论,依据地下空间测量的特殊性,结合Leica Pegasus:Backpack背包式三维激光扫描系统开展了有开创性的试验工作。针对典型地下空间设施,选择了轨道交通的地铁车站、城市隧道、综合管廊、地下溶洞、地下停车场等场景情况应用不同采集作业模式及方法逐一进行了数据获取及研究分析。
首先在城市隧道、地下溶洞进行数据获取研究分析,摘取试验数据图4结合轨迹解算及点云处理情况得出:由于隧道内高速移动车辆较多、隧道较长(2 160 M)、内部特征点单一且规律分布、零速校正未做实时控制等因素影响,导致数据获取结果出现点云分层严重、最弱部位出现点云紊乱现象,研究分析发现了基准站、轨迹路线的设计、姿态的稳定程度、移动物体、场景特征及分布、零速校正功能的精准使用、失锁时间等因素对数据获取均有影响,其中,关键影响因素为:基准站、场景特征及分布、零速校正功能的精准使用。同时还发现数据获取精度与卫星失锁时间及地下工作时间成反比关系、行走轨迹的横向精度优于纵向精度。

图4 城市隧道数据获取情况
基于城市隧道获取的数据研究分析结论,在地下溶洞方面进行数据获取试验,并提出如下优化及处理措施:
①选择对空条件良好位置架设基准站,考虑基准站与施测区域的几何图形强度因素,确保GNSS接收机获取良好的卫星观测数据,提高轨迹解算精度;
②优化轨迹路线设计,尽量重复扫描轨迹路线节点部位、遵循盲区最小化原则、移动物体进入有效扫描范围时暂停扫描、匀速慢速、行走姿态相对稳定;
③数据获取时及时结合场景复杂程度进行零速校正,通过GNSS/INS Error值来控制时间长短,此值大于5时延长零速校正时间,直至GNSS/INS Error值稳定在5以下,提高SLAM解算时的轨迹精度;
④扫描开始前熟知场景特征,对于无明显棱角特征点分布或棱角特征点分布比较规律的场景,在扫描开始前人为增加特征点,比如:依据行走路线在路线两侧及上下部位设置棱角明显的靶标、固定物体等。
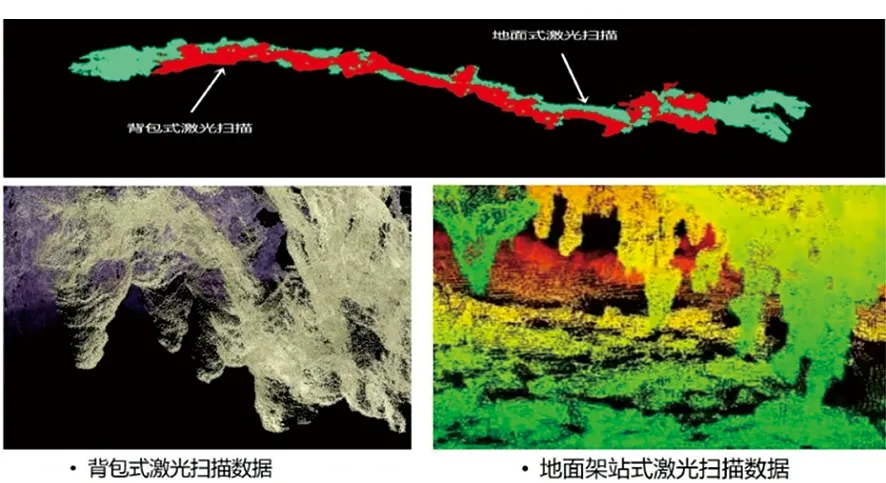
图5 地下溶洞数据获取情况
摘取试验数据图5结合轨迹解算及点云处理情况得出:数据获取结果未出现点云分层严重现象及最弱部位点云紊乱现象,同时采用地面架站式激光扫描仪进行同一区域重复扫描检测,三维点云的横向精度及纵向精度均较为吻合,数据可满足溶洞的开发设计使用需求。但是在长时间、长距离卫星失锁时间段,仍然出现数据获取精度与卫星失锁时间及地下工作时间成反比关系,即:距离起点 400 m以后的数据依然出现精度衰减现象。
再基于城市隧道及地下溶洞获取数据研究分析结果,研究团队结合GNSS静态数据处理理论、控制测量导线施测原理及方法设计轨迹路线,同时研究分析点云配准原理,设计了点云配准可识别的自定义编码图案,在保留上述优化及处理措施的同时增加如下具体措施:
①采用多星座GNSS接收机作为基准站设备,同时增加基准站数量至3台,分别进行单基准站、双基准站、多基准站的轨迹解算与精度分析,提高GNSS&IMU导航定位精度。
②数据获取时通过GNSS/INS Error值来控制零速校正时间长短,将GNSS/INS Error值控制在2以下,进一步提高SLAM解算时的轨迹精度;
③在场景特征简单且轨迹路线的结点位置增加明显棱角特征点、自定义编码图案,提高点云配准精度。
先后在地下停车场、综合管廊、轨道交通工程的地铁车站及区间隧道等场景进行数据获取研究,验证了上述优化措施可行可靠,但在轨迹路线长度大于 400 m时需要在最弱部位加测控制点,通过导线平差原理对轨迹路线进行平差处理或者针对点云数据分层现象,使用几何改正和强度校正的方法进行处理,建立相应的强度校正模型来修正激光入射角度、扫描系统与对象的间距等因素对点云反射强度的影响。即:使用软件的轨迹纠正功能(SLAM QC Tool模块)。才能解决长时间的数据采集会导致误差累计过大问题。经优化处理后摘取轨道交通工程的地铁车站及区间隧道试验数据如图6所示:
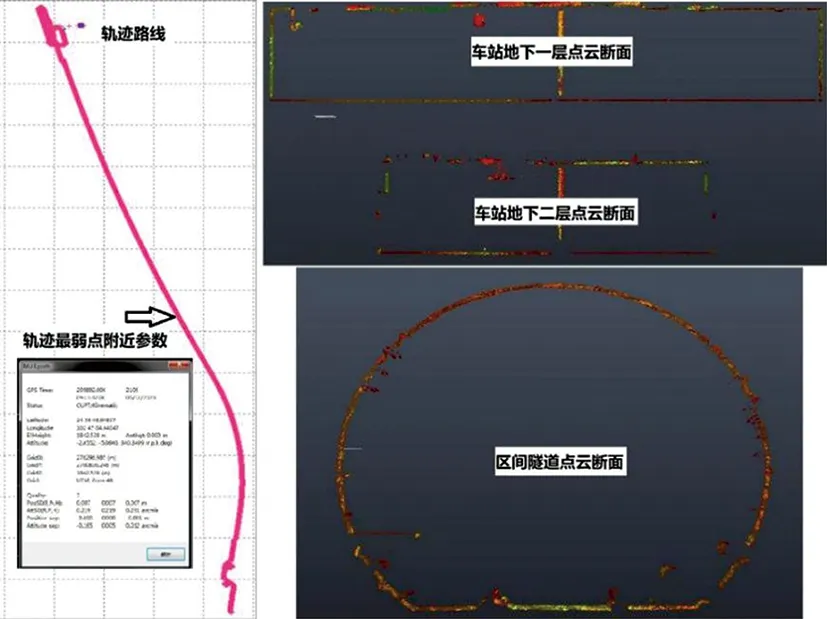
图6 地铁车站及区间隧道数据获取情况
从图6可以看出:轨迹数据无异常、点云数据无分层及其他异常情况、点云厚度均小于 5 cm。试验段全长 1 300 m,已在中间最弱部位及最弱部位两侧各 200 m附近共设3对控制点,分别对轨迹及点云进行平差处理,再采用全站仪沿轨迹路线附近分别对数据获取区域间隔 100 m附近实测一点进行实测检查点云的绝对精度情况,共计实测16点,精度统计如表1所示:
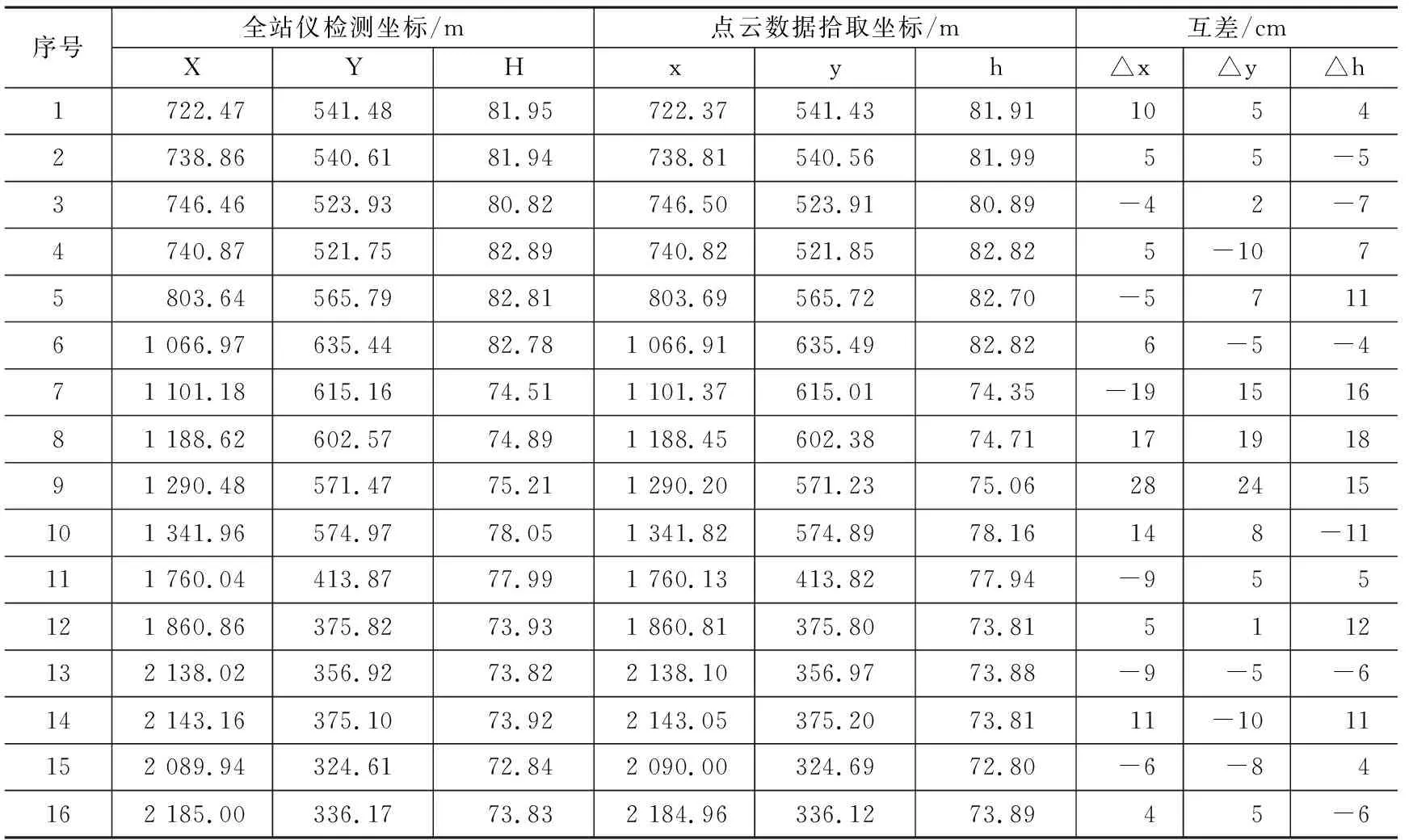
实测检查点云精度统计情况 表1
分析表1精度检测结果得出:起点和终点附近数据精度优于轨迹中间最弱部位,整体数据精度在经平差处理后的剔除9号点计算坐标中误差为: 13.0 cm;高程中误差为:9.5 cm,获取的三维点云数据可以满足地下空间信息化使用需要。如需更高精度的数据还可在数据获取区域布设更高精度的控制点对轨迹及点云进行平差处理,以达到具体要求。
4 结 论
通过对不同场景条件下的地下空间设施数据获取结果研究分析,得出了GNSS & IMU & SLAM融合定位及三维激光扫描技术在地下空间数据获取中的关键影响因素,并提出和验证了相应优化处理措施,形成了高效的数据采集方案及流程,研究结论如下:
(1)地下空间数据获取过程关键要点:轨迹路线的设计及优化;基准站的对空条件与基站和测区的几何强度;姿态的相对稳定及零速校正的实时精准控制。
(2)GNSS对空条件复杂环境下双基准站或多基准站组合导航(GNSS/IMU)的定位精度优于单基准站模式;基准站数量相同时,多星座GNSS接收机解算的轨迹精度优于单星座或双星座。
(3)针对轨迹纵向偏移、点云数据分层现象,可采用几何改正和强度校正的方法进行处理,有效解决长时间的数据获取会导致定位误差累计过大问题。
(4)通过研究区域的实验发现,该三维激光扫描系统在数据采集时抗干扰算法、GNSS & IMU & SLAM融合定位模式的人工干预方面应加强研发,以实现更长距离室内定位的应用。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
导航定位学报(2022年1期)2022-02-17
读友·少年文学(清雅版)(2020年4期)2020-08-24
好日子(下旬)(2020年6期)2020-08-04
读友·少年文学(清雅版)(2020年3期)2020-07-24
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
劳动保护(2018年8期)2018-09-12
北京航空航天大学学报(2016年7期)2016-11-16
电子制作(2016年1期)2016-11-07