基于声固耦合理论对捕捞航行器的湿模态分析
2022-03-04 02:53刘义翔刘凌霄关祥毅冯砚博
哈尔滨商业大学学报(自然科学版) 2022年1期
刘义翔, 刘凌霄, 田 野, 关祥毅, 冯砚博
(1.哈尔滨商业大学 轻工学院 ,哈尔滨150028;2.中建三局集团有限公司,武汉430074)
目前对捕捞作业水下航行器的研究亟待深入,然而民用水下航行器发展受传统设计的制约.民用水下航行器的研制始于20世纪80年代初,其主要用于的海洋资源勘测、海上石油天然气的开发、海洋水产品养殖等.
近年来,水下航行器得到了迅速发展,在海洋养殖捕捞器、科研探测等领域应用较广泛,但由于其特殊的工况,不易于进行试验,因此利用ANSYS软件进行相关数据的分析很有必要[1-2].水下航行器在工作时,会受到周围水介质的作用,产生流固耦合效应[3].因此对其湿模态进行分析,取前十阶模态,分析水下环境对于航行器的振动特性的影响.
本文的水下航行器是一个典型框架型机器.机器本体结构由主体框架和内部控制设备组成,其外部框架作支撑整体机器的运行,如若碰到礁石或其他障碍物,未能及时躲避的话,它可保护机器的内部结构不被损坏.机器本体的前端装有图像采集装置,以保证机器能将航行时的水底工况与周围环境及时向控制器反馈.机器本体结构的两侧浮力装置能完成机器的下潜或者上浮[4],中间段装有控制器,推进器结构安装在机器本体末端或中段,它是机器的动力来源[5].
作为典型的水下航行器设计分为框架型与流线型设计,综合考虑水下的实际工况,它们都具有其局限性.考虑到工作目标是进行拾取海底养殖的海产品收集,流线型航行器在自身负载方面优于框架型航行,故此决定采用流线型水下航行器进行总体设计,使其能够完成养殖海产品捕捞的工作要求,该航行器本体的结构如图1所示.也称水下航行器.
该捕捞作业水下航行器结构上背负两个收集舱,对称放置,保持其在水下浮力作用下的稳定性,同时左右还各有两个活动捕捞装置,其活动空间较大,可灵活地拾取采集目标养殖海产品.收集舱外形以原流线型水下航行器的弧度设计,为了降低水的阻力采取半圆弧式的结构.除此还在航行器底部配有两个防撞轮,以保证机器在遇到海底礁石等不利环境时不被损坏.
捕捞作业水下航行器的关键技术在于,如何应对水下的复杂工况中,将机械设计、智能图像识别控制系统以及算法等多种技术进行融合应用[6].
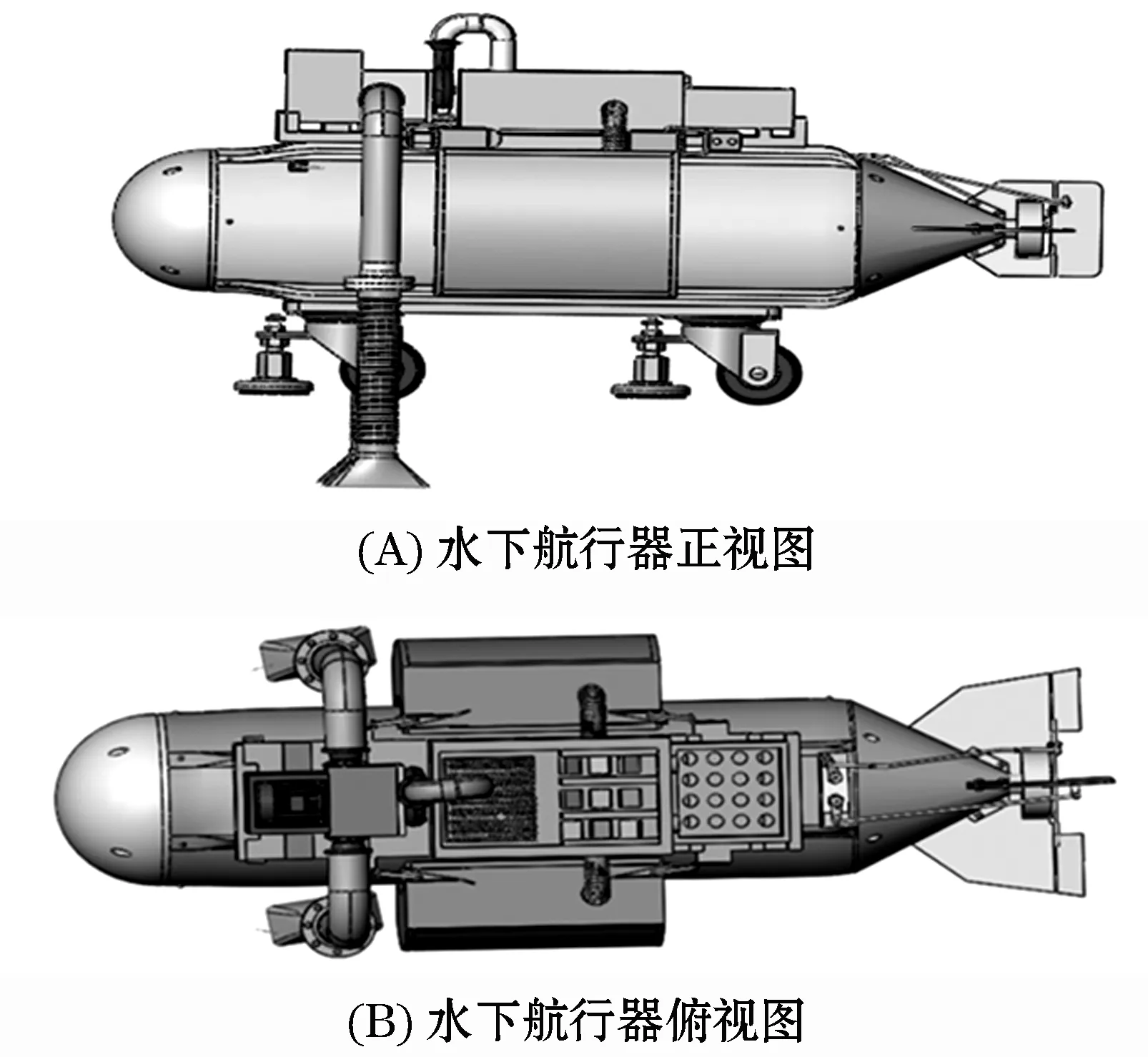
图1 水下航行器总体设计图Figure 1 Overall design drawing of underwater vehicle
机械系统设计的水下航行器是载体.机器本体外形主要是流线型框架式,其耐压壳体设计时,首先要满足深水载荷作用下的结构与强度要求;另外,必须采用密封结构以保护内部结构与电器元件,从而保证捕捞作业水下航行器的正常航行.该捕捞作业水下机器人的参数如表 1所示.

表1 捕捞作业水下航行器参数
用CFD仿真模拟捕捞作业水下航行器在流体中运动的情况,得到其在不同运动速度下的阻力系数和相应其他参数,以及各速度分布情况与压力云图等.因水下航行器在其最初设计时,可能达不到最优的性能,仿真可利于对优化设计进行指导作用.
1 理论基础
应用声固耦合基础对水下航行器的湿模态进行分析,将流体视为可压缩的声学介质[7-8],流体对水下航行器的影响表现为作用在结构壁面的声压动载荷.
在进行耦合分析时,需要对流体及声固耦合水下航行器的模型做出如下基本假设:
1)流体是无黏和可压缩的;
2)声波振幅相对较窄,这样流体密度变化较小;
3)波传播与热力学过程是绝热的.
可压缩流体的Helhmoltz声学波动方程为[9]:
(1)
离散化后的流体波动方程用矩阵形式表示为[10]:
(2)
航行的水下航行器结构力学方程为[8]:
[KS]{U}-[R]{P}=[FS]
(3)
将方程(2)与(3)合并,得声固耦合方程:
(4)
其中:[Mfs]=ρ0[R]T,[Kfs]=-[R],[M]为质量矩阵,[C]为阻尼矩阵,[K]为刚度矩阵,{P}为流体声学载荷矩阵,[Mfs]为质量耦合矩阵,下标S为水下机器人结构,f为流体.
2 水下航行器模态分析
本文选取了典型的海洋捕捞水下航行器,并对其结构进行了简化以便于分析,在声固耦合方程的理论基础上,求得了航行器在水下悬浮状态的前10阶模态.
2.1 模态分析前处理
该水下航行器模型长1.065 m,半径0.075 m,壁厚0.1 m,采用合金钢材料,密度7 800 kg/m3,弹性模量2e+11Pa,泊松比0.3,材料为各向同性[11-12].
应用ANSYS Workbench软件,对该航行器设置流体包围域并划分网格,如图1所示,由于分析航行器在水下漂浮状态时的模态,所以不对其施加载荷及约束,基于公式( 4 )给出的声固耦合方程,求解出航行器在水下受流固耦合效应的前10阶模态.
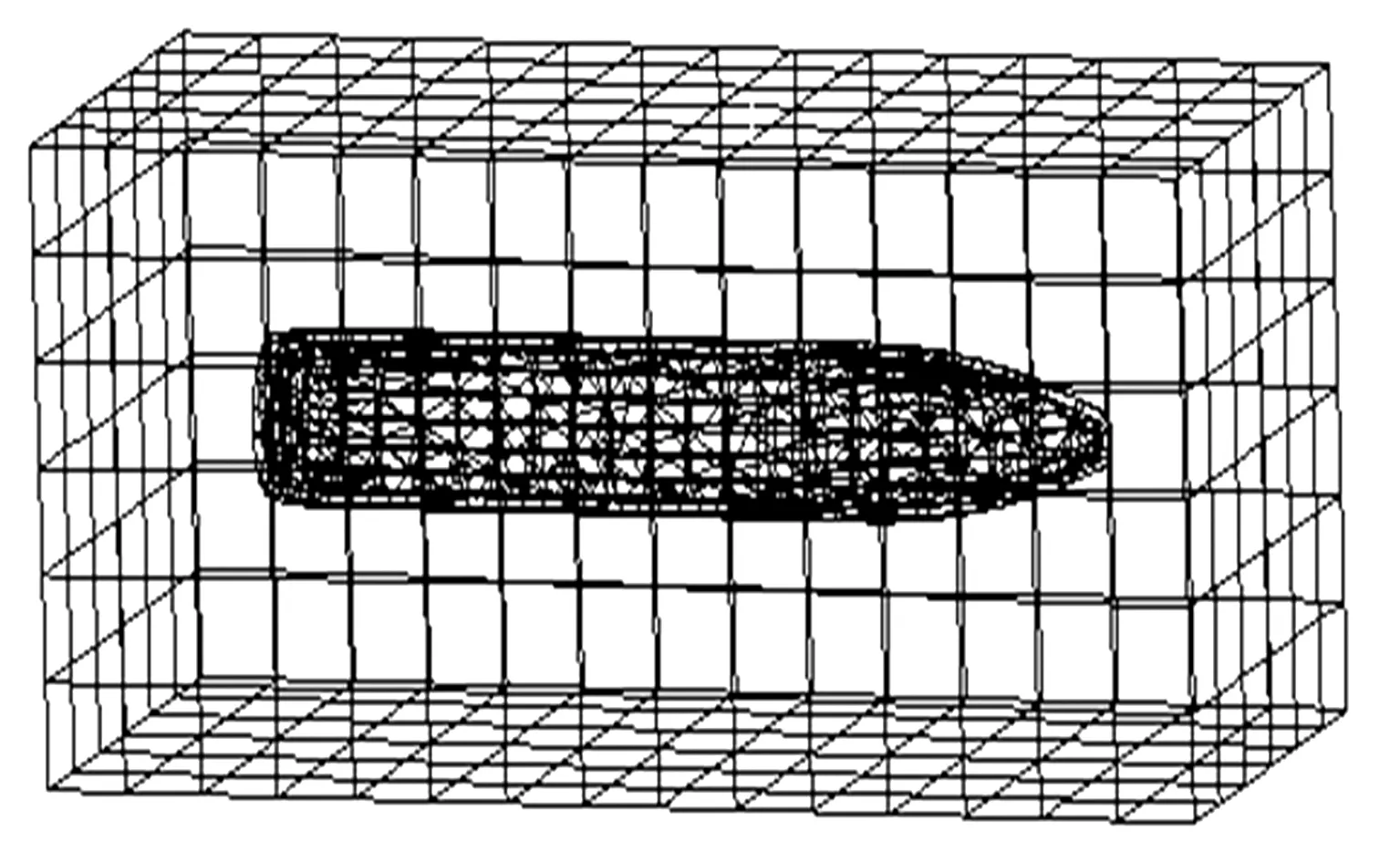
图2 水下航行器网格化分结果Figure 2 Meshing results of underwater vehicle
2.2 模态分析
由于未施加位移约束,故此计算的前6阶模态均为水下机器人的刚体模态,其值近似为0[13],水下机器人第7阶至第10阶的频率如表2所示.第7阶至第10阶振型如图3~6所示.

表2 水下航行器第7~10阶频率
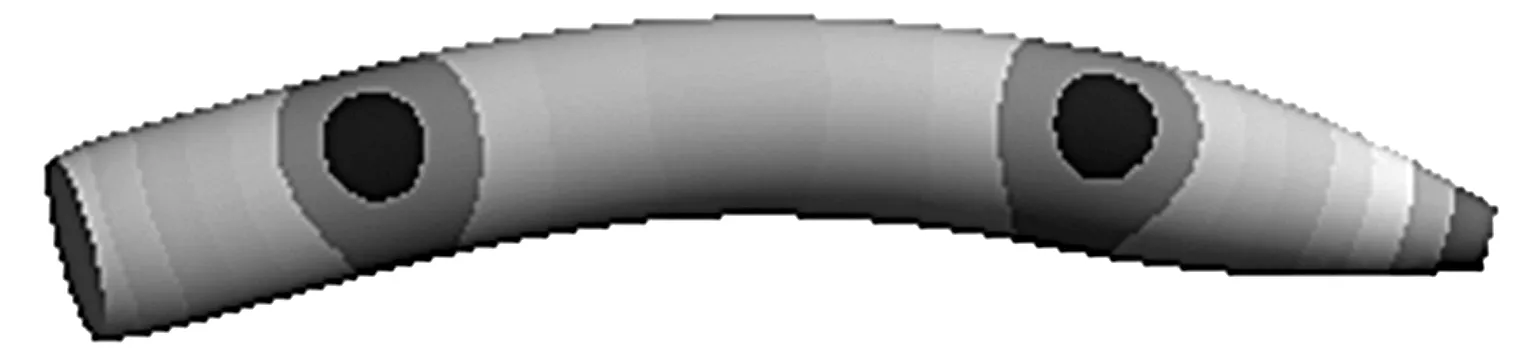
图3 第7阶振型Figure 3 7th Modal Shape Figure
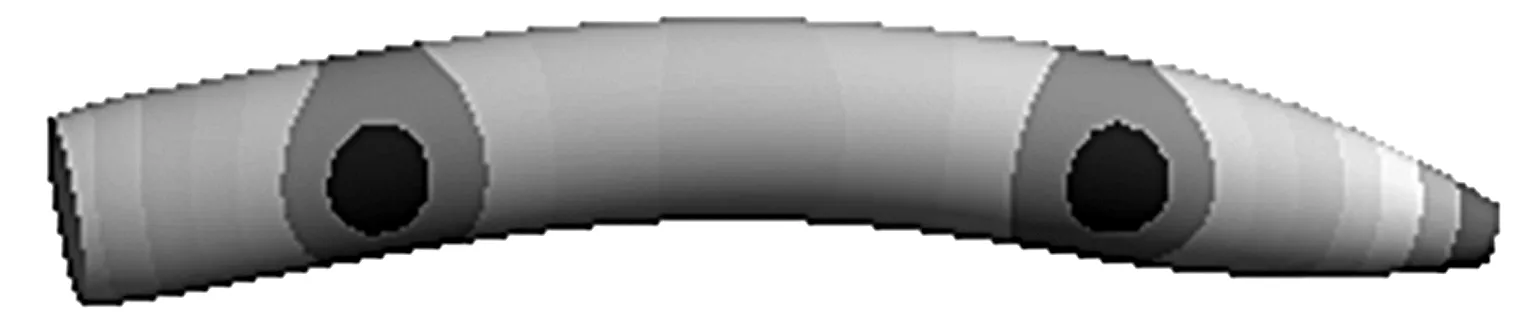
图4 第8阶振型Figure 4 8th Modal Shape Figure

图5 第9阶振型Figure 5 9th Modal Shape Figure

图6 第10阶振型Figure 6 10th Modal Shape Figure
由表1可看出,该水下航行器在第9阶时频率发生变化较大,且频率较高,发生高频共振的可能性大[14],结合各阶振型图可以看出,第7阶、第8阶的振型为弯曲振型,而第9阶、第10阶为扭转振型.同时水下航行器的位移在各阶模态下产生微小变动,对水下航行器工作状态影响有限,说明结构基本满足设计要求;但刚度不够,需要进一步优化.由于模型是对水下航行器进行了简化,只保留了壳体,因此在后续的设计中,需要对内部构件的设计进行合理安排,以尽量提高整体刚度,保持在水下工作时的稳定性[15].
3 结 语
基于声固耦合理论对捕捞作业水下航行器的湿模态分析,具有较大的实际工程意义,通过对其模态的分析,可检验结构能否满足要求,并进行优化设计.该捕捞作业水下航行器经过湿模态分析,根据其位移量大小与振型图,其外形结构基本满足设计及工作要求,但仍需要进一步优化,以更好地提高工作性能;同时根据提取的前10阶频率,还需要防范捕捞作业水下航行器发生高频共振现象.
猜你喜欢
工业建筑(2022年2期)2022-06-29
能源工程(2022年2期)2022-05-23
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
兰州交通大学学报(2022年2期)2022-04-26
疯狂英语·新读写(2021年6期)2021-08-05
大众科学(2020年7期)2020-10-26
儿童故事画报(2020年7期)2020-08-03
小学科学(2020年6期)2020-06-22
铁路技术创新(2020年6期)2020-02-25
空气动力学学报(2018年6期)2018-12-03