
基于自适应控制的分数阶不确定耦合递归动态神经网络系统的参数识别
2022-03-01 05:20:30曲禧龙张艳平郑明文于潇姜兆磊
山东理工大学学报(自然科学版) 2022年3期
曲禧龙,张艳平 ,郑明文,于潇,姜兆磊
(1. 山东理工大学 数学与统计学院, 山东 淄博 255049 2. 山东理工大学 计算机科学与技术学院, 山东 淄博 255049)
人工神经网络是当前人工智能领域研究的一个热点问题。关于人工神经网络非线性动力学问题的研究是其重要的研究分支之一,它主要通过采用动力学系统理论、非线性规划理论和统计理论,研究神经信息处理机制[1-2]。近年来递归动态神经网络(RDNNs)得到了学术界关注,广泛应用在信号处理[3-4],优化计算[5-6]等方面。递归动态神经网络由多个节点组成,其中每个节点都是一个动力学系统,向每个节点添加耦合和连接强度,可将其看作一种复杂的动力学神经网络。
近年来,如何快速准确识别不确定耦合递归动态神经网络的未知参数和拓扑结构成为了当前研究的一个热门课题,这对于理论研究和实际应用都具有重要意义。关于整数阶不确定耦合动态神经的参数识别得到了很多学者的研究,在复杂网络的参数识别和同步控制方面取得了一些进展[7-13]。目前,复杂网络参数识别是基于同步的方法,其中包括完全同步[14],反同步[15]等,如文献[16-17]使用不同的控制策略实现了同步。
Zheng等[18]研究了带有时延的整数阶不确定耦合递归神经网络的参数识别和同步。Si等[19]研究了分数阶复杂动态神经网络的参数辨识和拓扑识别。文献综述得知,分数阶微分方程具有更好的性质,可以更准确地描述系统的变化。因此本文研究基于自适应控制的FUCRDNNs参数识别问题,通过设计自适应控制器和未知参数的更新法则,以实现FUCRDNNs中未知参数和拓扑结构的准确识别。
1 引理和网络系统
1.1 分数阶微分的定义
在分数阶微积分的发展历史中,对分数阶微积分有过许多不同的定义,其中,Caputo定义因其广泛的实际应用而被认为是最常使用的定义。因此,本文使用Caputo定义来描述分数阶微分系统。
分数阶微分的Caputo定义为
(1)
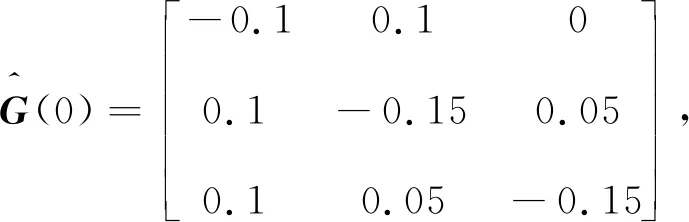
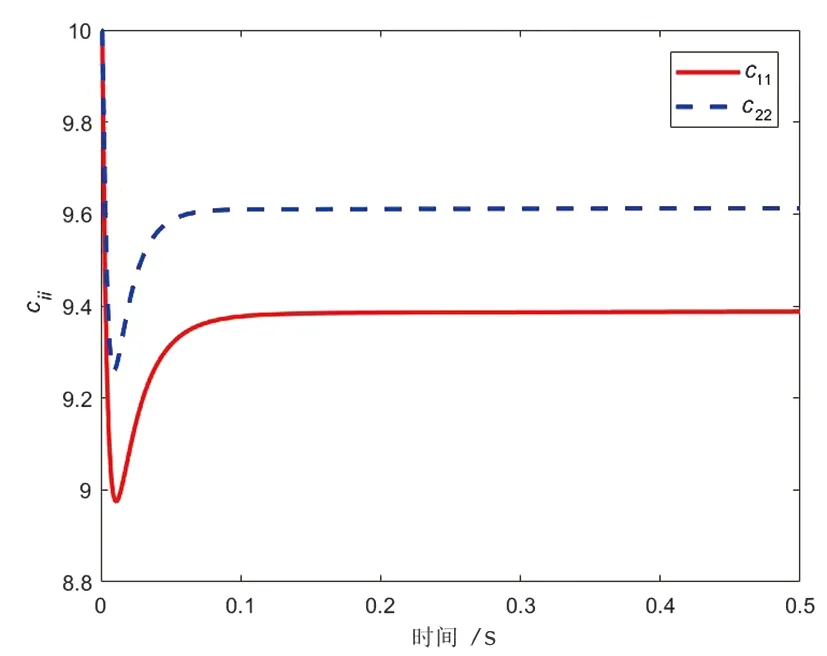
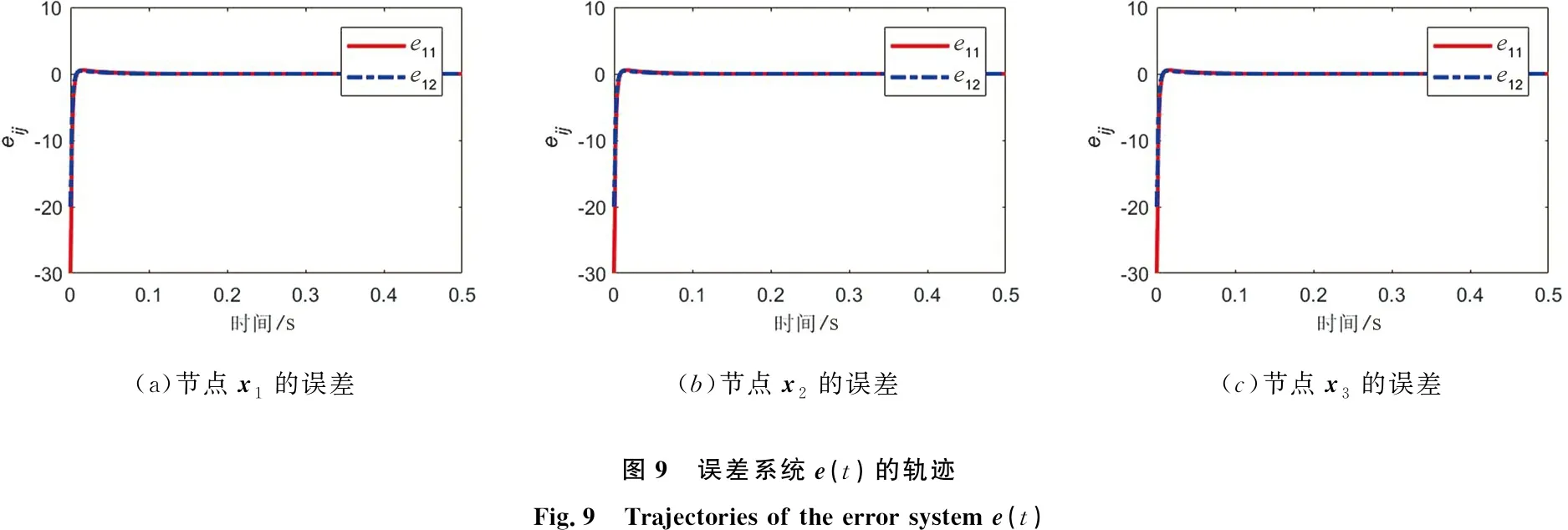
式中:n是第一个大于q的整数,即n-1 (2) 首先考虑如下的分数阶系统: DqX=AX (3) 或 DqX=f(X), (4) 式中:X∈Rn;A∈Rn×n;q∈(0,1]。 引理1如果A是一个常数矩阵并且|arg(λi(A))| Craye等[20]首次提出了引理1,该引理已被广泛应用于递归动态神经网络的稳定性证明和同步控制问题中。 引理2如果存在一个实对称正定矩阵P对于任意的状态向量X(t)都满足J=XTPDqX≤0,那么分数阶非线性系统(3)和(4)在阶数为0 引理2的证明见文献[21]。 本文中包含N个节点的FUCRDNNs数学模型可以描述为 Dqxi(t)=-Cxi(t)+αf(xi(t))+ (5) 式中:xi(t)=(xi1(t),xi2(t),...,xin(t))是第i个节点的状态向量;C=diag{c1,c2,...,cn}是正定对角矩阵;α=(αij)n×n∈Rn×n是连接权重矩阵;f(xi(t))=(f1(xi1(t)),f2(xi2(t)),…,fn(xin(t)))是激活函数;G=(gij)N×N∈RN×N,gij≥0是外部耦合连接权系数;Γ=diag{γ1,γ2,…,γn}∈Rn×n,Γ>0是内部耦合矩阵;Ii(t)∈Rn为FUCRDNNs的外部输入。 (6) 本节通过设计一个自适应控制器和参数更新法则,实现两个FUCRDNNs的同步和未知参数的识别,并通过构造辅助函数证明该方法的局部渐近稳定性。 首先,基于自适应控制的方法,本文构造了一个带有自适应控制器的响应系统: (7) 定义1系统(5)和系统(7)的同步误差可以被定义为ei(t)=yi(t)-xi(t),故误差系统可以被定义为 (8) (9) 注3由于耦合的存在,本文不要求系统(1)和系统(2)的参数完全一致。 FUCRDNNs中未知参数的更新法则和自适应控制器可以被定义为 式中:θi(t)是自适应控制参数;σi是第i个节点的控制强度;pi>0,i=1,2,…,N;H=(hij)N×N是适合维度的矩阵。 注4当两个系统实现了同步,则误差系统将会趋近于0。 注5在本文中,模型中所有的未知参数都可以被成功识别。 定理1如果假设1成立,那么系统(5)和系统(7)就可以实现同步,并能够实现所有未知参数的识别。 (11) 式中:u,v∈N,u=i/n,v=i%n。 这里可以构造一个对称正定矩阵P (12) 本文可以做出推导: J=XTPDqX= (13) 式中 (14) 推论1如果FUCRDNNs由N个节点组成,移除其中的耦合项,则其数学模型可以被定义为 Dqxi(t)=-Cxi(t)+αf(xi(t))+Ii(t), (15) 则未知参数的更新法则和基于自适应的控制器可以被定义为 (16) 证明推论1的证明可以直接由定理1的证明得出,这里省略。 推论2如果参数C和α是已知的,那么未知参数的更新法则和自适应控制器可以被描述为 证明推论2的证明可由定理1的证明直接得出,本文省略。 本文给出两个数值算例验证所提出方法的有效性。 算例1以含有三个相同节点的不带耦合项的FUCRDNNs为例,其数学模型可以被定义为 Dqxi(t)=-Cxi(t)+αxi(t)+Ii(t),i=1,2,3。 (18) 这里可以构造一个响应系统: Ii(t)+ui(t),i=1,2,3, (19) 驱动系统(18)的初始条件为: x1=[30,10]T,x2=[-12,-30]T,x3=[13,-15]T。 在驱动系统(18)中需要被跟踪的参数为: 本文将响应系统(19)的初始值设置为: y1=[0,0]T,y2=[0,0]T,y3=[0,0]T。 响应系统(19)中需要被识别的参数初始值设置为: 图1 未知参数的识别结果 最后,此算例的参数识别结果为: 图2 未知参数的识别结果 (a)t∈[0,0.5] 算例2考虑一个含有三个相同节点的FUCRDNNs: (20) 这里可以构造一个响应系统: ui(t),i=1,2,3。 (21) 将驱动系统(20)的初始条件设置为: x1=[30,20]T,x2=[-10,-20]T, x3=[15,-10]T。 在驱动系统(20)中需要被跟踪的参数为: 将响应系统(21)的初始条件设置为: y1=[0,0]T,y2=[0,0]T,y3=[0,0]T。 将响应系统(21)中需要被识别参数的初值设置为: 其中:阶数q=0.995;自适应系数设置为σ=[2,2,2];p=[1,1,0.5];将激活函数定义为fi(x)=tanh(x),它显然满足李普希兹条件。图5—图9分 图5 未知参数的识别结果 最后,本文得出未知参数的识别结果为: 图6 未知参数的识别结果 图7 未知参数的识别结果 (a)t∈[0,0.5] 1)本文通过设计自适应的控制器,实现了两个分数阶神经网络系统的同步。 2)本文通过设计未知参数的更新法则,实现对FUCRDNNs中所有未知参数的识别。 3)本系统可以很容易地推广到不带耦合的FUCRDNNs的参数识别。一些只能识别部分未知参数的系统可以看作是本文的一个特例。 时延可能会改变系统性态,下一步将研究带有时延项的分数阶递归动态神经网络系统的同步和参数识别问题。
1.2 分数阶系统的局部稳定性理论
1.3 分数阶递归动态神经网络系统

2 参数识别法则和局部稳定性证明






3 数值算例
3.1 不含耦合项的FUCRDNNs参数识别










3.2 FUCRDNNs的参数估计和拓扑识别








4 结论
 猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02卫星应用(2022年3期)2022-05-23 13:44:30数学物理学报(2022年2期)2022-04-26 14:08:28卫星应用(2022年1期)2022-03-09 06:22:20环球慈善(2019年6期)2019-09-25 09:06:24山东青年(2016年1期)2016-02-28 14:25:25大型铸锻件(2015年5期)2015-12-16 11:43:20湖南理工学院学报(自然科学版)(2014年1期)2014-02-28 22:12:27济宁学院学报(2014年6期)2014-02-28 01:14:10当代修辞学(2014年3期)2014-01-21 02:30:44
猜你喜欢
卫星应用(2022年7期)2022-09-05 02:36:02卫星应用(2022年3期)2022-05-23 13:44:30数学物理学报(2022年2期)2022-04-26 14:08:28卫星应用(2022年1期)2022-03-09 06:22:20环球慈善(2019年6期)2019-09-25 09:06:24山东青年(2016年1期)2016-02-28 14:25:25大型铸锻件(2015年5期)2015-12-16 11:43:20湖南理工学院学报(自然科学版)(2014年1期)2014-02-28 22:12:27济宁学院学报(2014年6期)2014-02-28 01:14:10当代修辞学(2014年3期)2014-01-21 02:30:44
