
基于Retinex理论的船舶图像照度提取算法
2022-03-01 05:21:02刘莹张亮
山东理工大学学报(自然科学版) 2022年3期
刘莹,张亮
(1. 长春光华学院 基础教研部,吉林 长春 130033;2. 陆军装甲兵学院士官学校 ,吉林 长春 130033)
由于船舶航行在时间和空间上的限制,传统固定照明和固定色温照明模式不再适合现代船舶照明系统的要求。目前自适应照明控制系统可实现设备智能化、精细化管理,具有节约能源、减少船组工作人力成本、提高工作效率等优点。通过摄像机获取环境图像的照度信息是自适应控制灯具亮度中一项必不可少的任务,而照度估计在图像处理中也是学者们研究的热点。传统的图像照度提取主要是基于灰度变换的方法,虽然可以提取图像照度,但同时提高亮度与对比度容易导致信息丢失、局部过增强等问题。基于Retinex理论的图像照度提取方法具有压缩动态范围和颜色恒常等特点,其中最经典的有单尺度Retinex(SSR)[1]、多尺度Retinex(MSR)[2-3]、带色彩恢复的多尺度Retinex(MSRCR)[4]等方法。Retinex理论在照度估计时需要调整颜色分量,增加了计算量,本文基于HIS模型计算亮度分量,用以简化计算,并且应用颜色恒常性理论(Retinex)将摄像机得到的船舱图像分解为照度以及反射两个分量,进而在HIS空间[5]下估计船舱图像照度函数。
1 HIS模型
通常用以区别不同颜色特性的是亮度、色调、饱和度。HIS系统[6]是图像处理中一个常用的色彩空间,其中H、S、I分别表示色调、饱和度和亮度[7],HIS是直观地反应人类感知颜色的方式。HIS系统把亮度信息和颜色信息分离开,用H和S表示颜色信息,I表示一幅图像中像素的整体亮度[8]。H、S、I是相互独立的,而且这3个分量可以分开处理。从RGB变换为HIS,设(R,G,B)是一个颜色红、绿、蓝坐标,它们的值是0到1之间的实数。要找到HIS空间中(H,S,I)值(这里H∈[0,360)是角度的色相角),其计算式为
(1)
其中:
S,I∈[0,1]是饱和度和亮度,其计算式分别为
(2)
(3)
2 Retinex理论
Retinex理论近年来受到学者的广泛关注,尤其是基于中心环绕的Retinex方法[7-10],该方法利用中心环绕函数估计得到照度分量,具有颜色恒常和低复杂度等优点。其核心思想是将当前像素点与其领域内的像素点进行比较,进而达到去除光照的目的。根据Lambert照度模型[11],图像S(x,y)可以分解为反射分量R(x,y)与光照分量L(x,y),表示为二者的乘积即
S(x,y)=R(x,y)L(x,y)。
(4)
传统SSR算法中图像照度由长波、中波、短波三种光线的反射能力决定,虽然可以对图像的动态范围进行压缩,但是不能保持图像高保真度并且伴有光照晕染的现象。MSR算法在SSR算法的基础上进行改进,其原理是对多个SSR模型做加权平均运算,采用高斯中心环绕函数对原始图像进行卷积运算,多尺度环绕函数能实现动态范围压缩和颜色保真之间的平衡。MSRCR算法对MSR算法进行改进,在此基础上加入了颜色恢复因子,用于调节图像部分区域因对比度增强而导致颜色失真问题。MSRCR算法的数学表达式为
式中:Ii(x,y)为R、G、B其中一个色彩通道;RMSRi(x,y)为环境光的反射分量;RMSRCRi(x,y)为携带图像细节信息的目标物体的反射分量;Ci(x,y)为尺度参数。MSRCR主要对图像增强计算反射分量意义较大,对照度分量计算没有影响。
3 基于HIS模型的MSR照度计算
自然环境下影响照度提取的因素很多,如图片照度水平、获取光源的显色性、亮度的空间分布状态等。计算工作面上点p的水平照度,根据配光曲线法有
(5)
式中:Lp为p的照度;I为光强;θ为光入射方向与光照射平面法线方向夹角;r为光照源点到工作面上p点的距离。由于照度影响因素很多,而配光曲线法考虑因素过少,因此本文作如下分析改进。
由光学系统射出的光通量φ为
(6)
式中:L为发光面的亮度;S为待测物面;d为物距;A为光学系统的出瞳面积;τ为光学系统的透射率,其随场景深度指数衰减,可表示为
τ(x)=e[-βd(x)],
(7)
式中:β为常数即大气散射系数;d(x)为场景深度。像面上的照度E为
(8)
式中Q为像面。有几何关系
(9)
式中l为像距。经过几何变换照度E可写为
(10)
式中出瞳面积A为
(11)
式中D为相对孔径。物象关系为
(12)
式中f为焦距。
将式(12)代入式(8)中有
(13)
式中:τ(x)是透射率,其随场景深度指数衰减,可表示为τ(x)=e[-βd(x)];β是常数大气散射系数;d(x)是场景深度;D为相对孔径,即镜头有效孔径与焦距之比;f为焦距;d为物距。
根据实际光照具有散射的瑞利特性,散射光线强度可表示为散射率比入射光线波长的四次幂,由此可得RGB三色光的传输贡献之比约为0.610 5∶0.286 8∶0.102 7。人类视觉系统对RGB三基色可检测到的输入信息不同,视觉系统对绿光的敏感度最强,是对红光敏感度的2倍,对蓝光的敏感度约为红光的1/3。由上述散射特性与人类视觉系统可得亮度与R、G、B的数学模型,即
I(x,y)=0.610 5×R(x,y)+0.286 8×
G(x,y)+0.102 7×B(x,y)。
(14)
将亮度函数与高斯滤波做卷积运算,从形式上均利用邻近像素值的某种加权平均获取当前像素值。引入的两个不同形式的权值考虑因子,即像素矩阵值与邻近像素元素点有如下的空间位置关系:
(15)
式中:I(m,n)表示亮度图像;L(x,y)为滤波后的图像;(x,y)表示滤波窗口的中心像素点;(m,n)表示二维邻域内的像素点;H(m,n;x,y)表示邻域内像素元素点对应于中心元素的权值,由空间域和像素域上的高斯滤波的方差共同决定,有
(16)
基于HIS模型的MSR算法估计照度函数的具体步骤为:
1)获取图像S(x,y)的R、G、B3个通道分量,并将它们的数据类型转换为HIS类型,提取光强分量I(x,y)。
3)将H(m,n;x,y)与I(x,y)做卷积运算,得到 Retinex理论中的L(x,y)。
4)将计算得到的L(x,y)带入到式(15)中,根据摄像机参数,求得最终获取图像的照度。
4 实验与分析
本文分别采用传统MSR算法与本文算法进行对比,通过仿真实验结果对本文算法的性能进行评价和分析。以图1所示3幅测试图像为例,参数选取见表1。

图1 测试图

表1 MSR参数值
将测试图像映射到HIS空间中,获取到的色调分量、饱和度分量以及亮度分量如图2—图4所示。
对图2—图4中的亮度分量进行照度提取,与传统MSR照度提取结果进行比较(如图5—图10所示)。
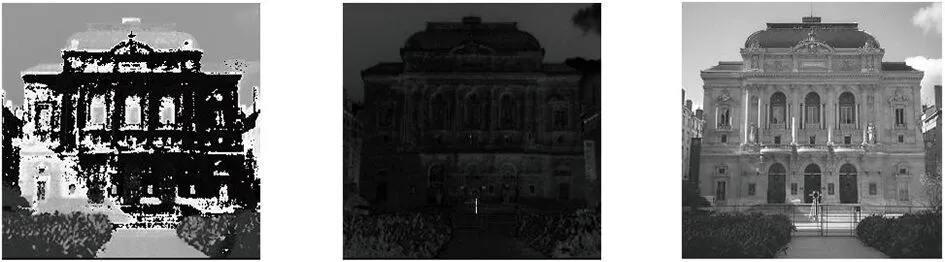
(a)色调分量 (b)饱和度分量 (c)亮度分量
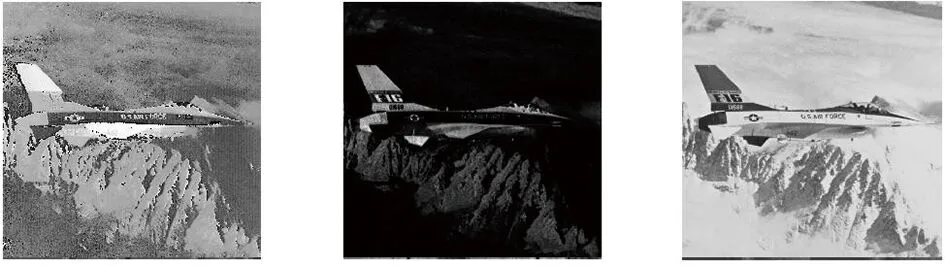
(a)色调分量 (b)饱和度分量 (c)亮度分量

(a)色调分量 (b)饱和度分量 (c)亮度分量
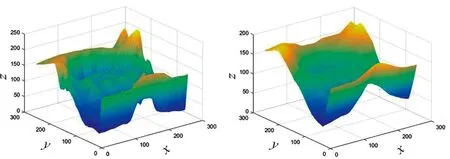
(a)MSR照度分量 (b)本文改进照度分量
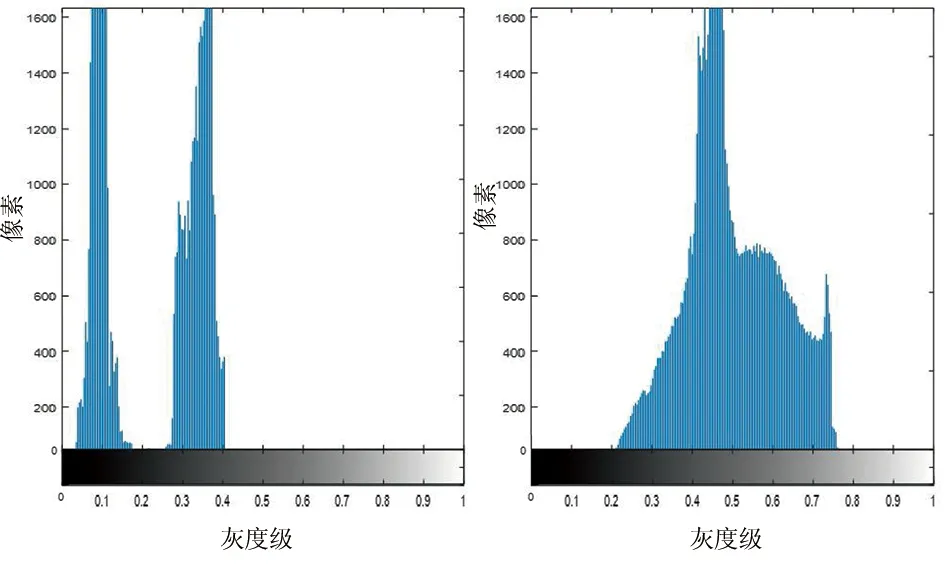
(a)MSR照度分量 (b)本文改进照度分量
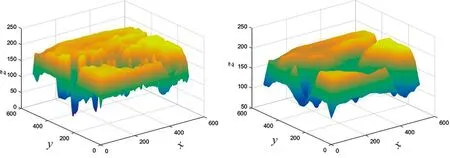
(a)MSR照度分量 (b)本文改进照度分量
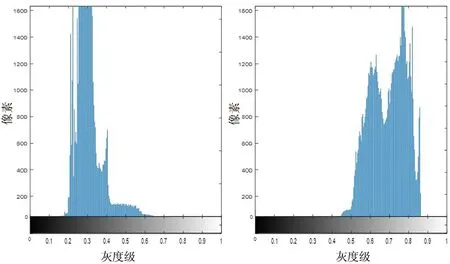
(a)MSR照度分量 (b)本文改进照度分量

(a)MSR照度分量 (b)本文改进照度分量

(a)MSR照度分量 (b)本文改进照度分量
从照度分量提取结果的三维像素图即图5、图7、图9可以看出,传统MSR算法提取的照度图像明显含有高频的图像边缘信息,本文改进算法得到的照度图像像素更加平滑,照度信息提取更为精确。从照度分量的直方图即6、图8、图10可以看出,传统MSR算法应用高斯中心环绕函数通过卷积运算得到的照度函数仍然含有原图像的轮廓信息,存在块状效应,经过本文处理抑制了MSR算法的块状效应,减少了MSR算法中颜色信息对照度提取的干扰,使灰度值分布更加均匀。
5 结束语
本文从传统的照度计算方法出发,针对船舱的环境因素如照度水平、亮度分布、亮度的空间分布状态等,提出一种新计算方法,进一步提高了计算精度。将RGB空间映射到HIS 直接对亮度分量提取光照信息,减少了图像中颜色信息对光照提取产生的影响。仿真结果表明,本文改进的算法明显减少了MSR提取照度时存有的图像轮廓,抑制了原算法容易产生的块状效应;由于该方法只针对一层数据进行运算,所以减少了算法的运算量。
猜你喜欢
小资CHIC!ELEGANCE(2021年25期)2021-07-29 08:44:26
光源与照明(2019年4期)2019-05-20 09:18:24
摄影之友(影像视觉)(2019年3期)2019-03-30 01:36:56
电子测试(2018年9期)2018-06-26 06:45:40
小天使·六年级语数英综合(2017年5期)2017-05-27 20:14:50
现代工业经济和信息化(2016年19期)2016-05-17 05:38:10
公民与法治(2016年23期)2016-05-17 04:21:08
少儿科学周刊·儿童版(2015年7期)2015-11-24 03:51:50
理科考试研究·高中(2014年11期)2014-11-26 04:23:34
优雅(2014年4期)2014-04-18 10:18:25
