
中央空调表冷阀自动控制方法改进
2022-03-01 06:03:46王明菱李增光孙树国代益鹏杨文
智能计算机与应用 2022年1期
王明菱,李增光,孙树国,代益鹏,杨文
(西昌卫星发射中心,四川 西昌 615000)
0 引言
工业生产厂房内部的中央空调一般采用表冷器对空气进行降温,控制方式通常为PID 控制。文献[1]对中央空调表冷器进行物理仿真建模,同时提出了模糊PID 控制算法。然而模糊PID 算法本质上仍属于PID 算法的范畴,主要优势在于即使系统随着时间的推移发生轻微变化,其控制效果仍能收敛至最优的PID 参数,不需要重新整定参数,因此其总体优化效果不可能比在最优的PID 参数取值下更好。本文不对PID 参数本身进行优化,而是通过增加PID 嵌套的环数来优化控制算法,提出了一种P+PI 间接控制方法,通过建立仿真模型论证了该方法的可行性,并将其应用在某厂房中央空调控制软件项目中,取得了满意的控制效果。
1 表冷器物理仿真模型简述
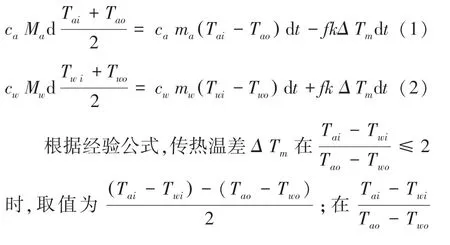
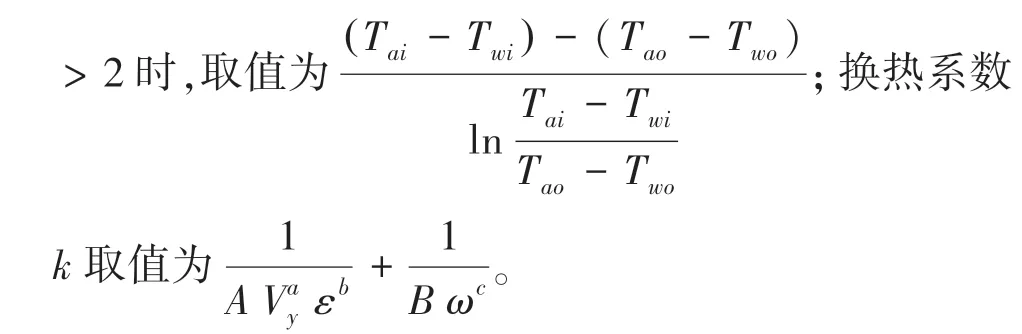
假设空调运行在干工况下,忽略表冷器的析湿效应。在微分时间d内,表冷器内部的换热方程如式(1)和式(2):
表冷器特性参数取JW30-4 型8 排表面冷却器的经验参数,见表1。
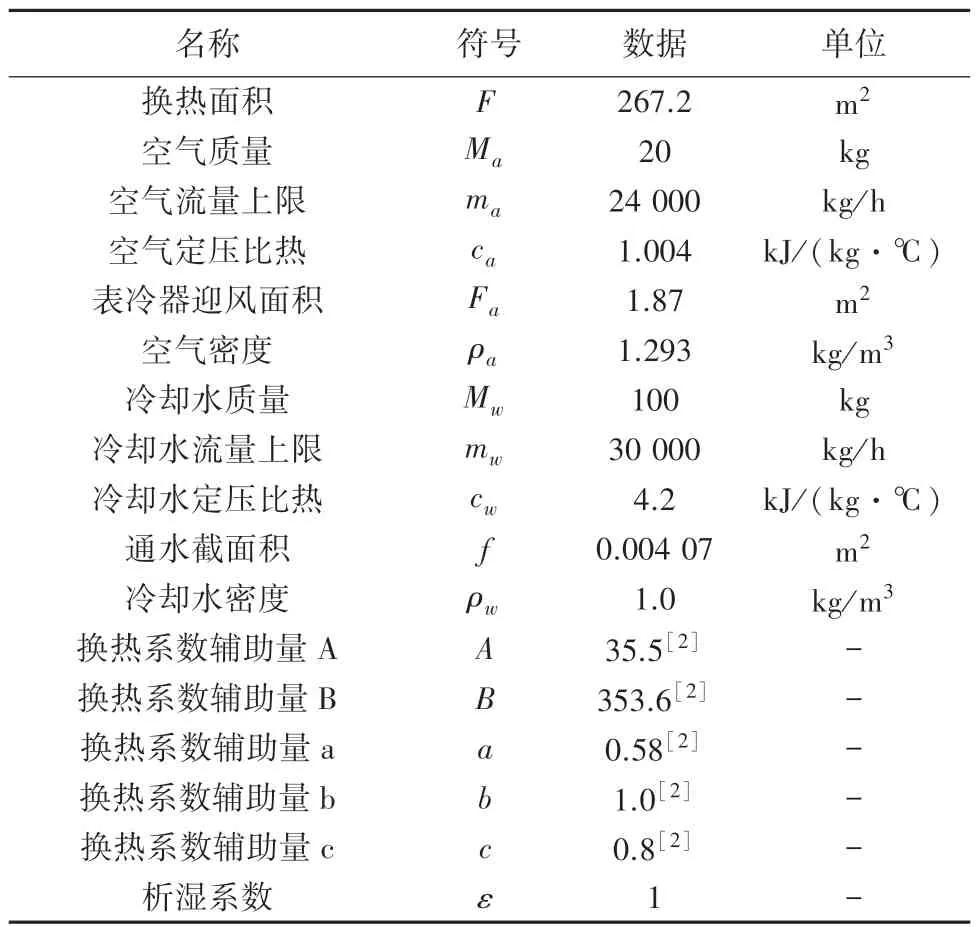
表1 表冷器特性参数取值Tab.1 The value of the characteristic parameter of the surface cooler
使用Simulink 工具对干工况下表冷器换热方程进行仿真,模型如图1 所示,模型中传热温差和换热系数的计算模块,如图2和图3 所示。
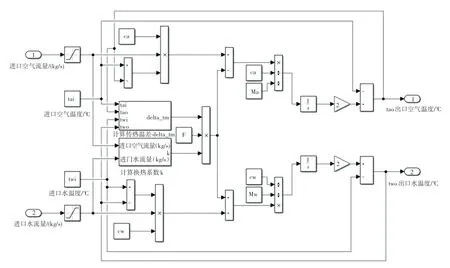
图1 干工况下表冷器换热仿真模型Fig.1 The heat transfer simulation model of the cooler under dry conditions
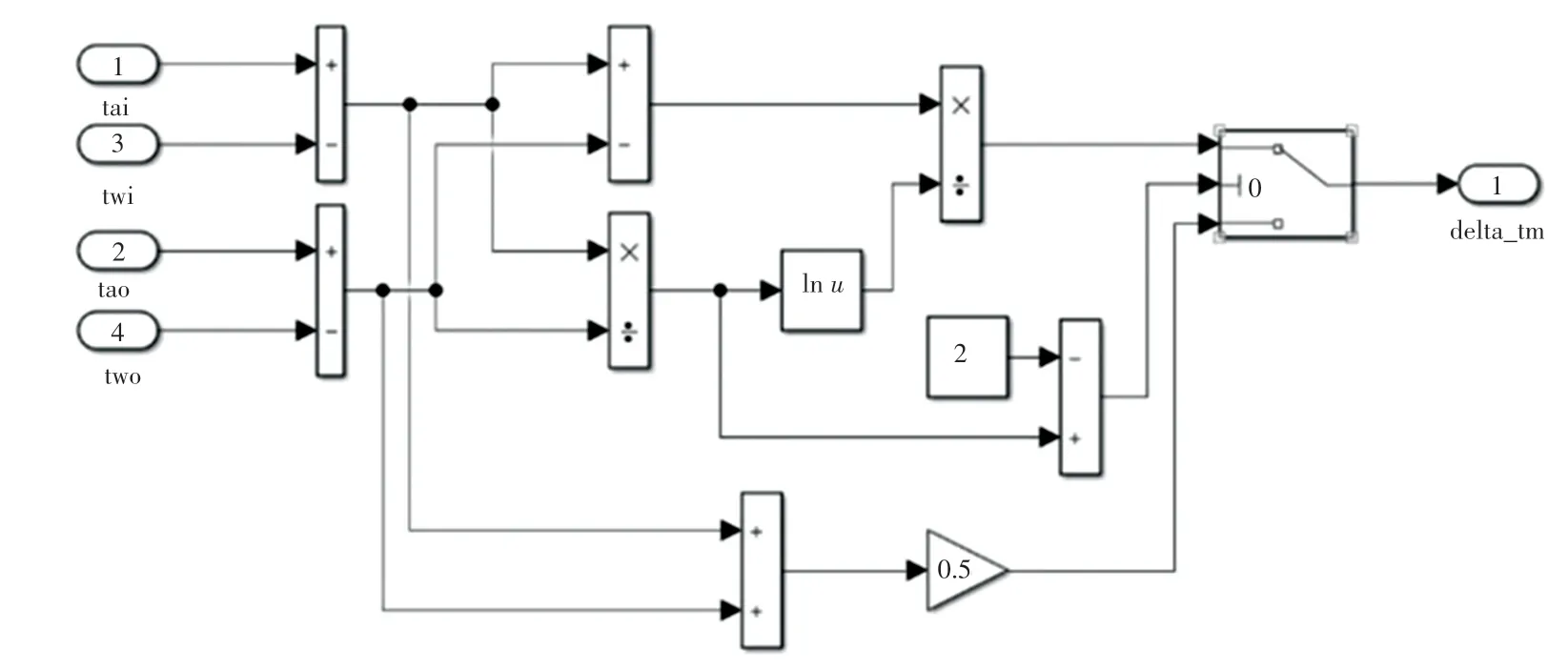
图2 传热温差计算仿真模型Fig.2 Simulation model of heat transfer temperature difference calculation
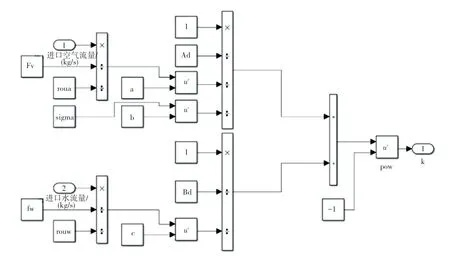
图3 换热系数计算仿真模型Fig.3 Simulation model of heat transfer coefficient calculation
2 传统控制方法简述
2.1 PID 算法
2.1.1 位置式PID 算法
送风温度的设定值为(),实际值为(),偏差值为()()()。于是有公式(3):

其中,K、K、K分别为比例、积分、微分系数,()为表冷三通阀的需求开度。
对公式(3)离散化,可得式(4):
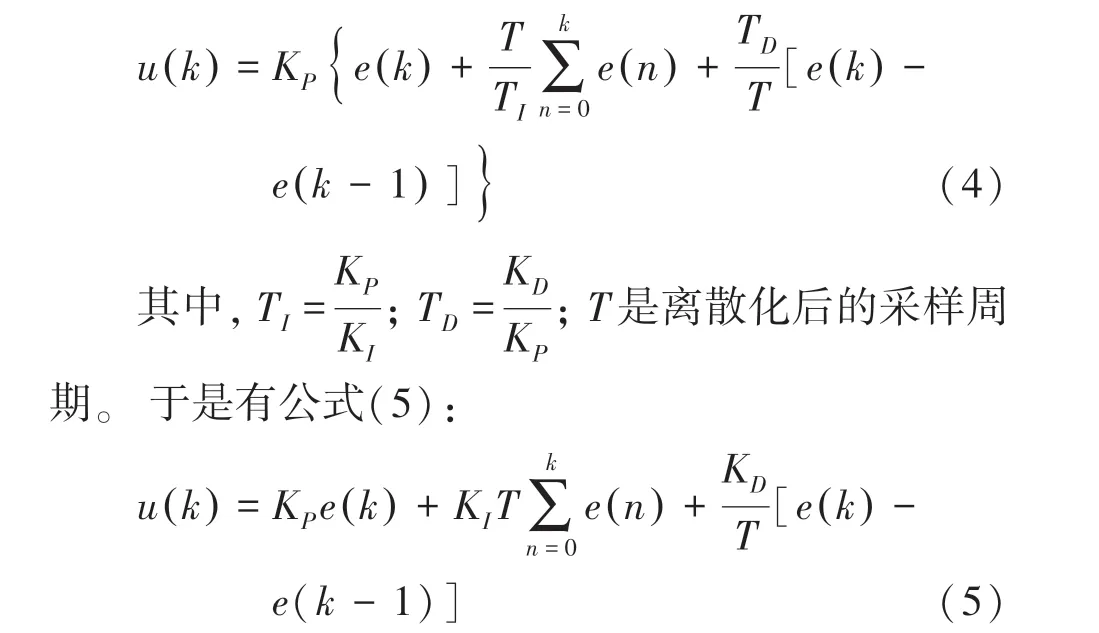
2.1.2 增量式PID 算法
由位置式PID 算法公式可得公式(6):

其中,()(1)。
增量式PID 控制算法不依赖于积分器或者累加器就能实现PID 控制,提高了运算资源和存储资源的利用效率,手动/自动切换时冲击小,便于实现无扰动切换。因此,增量式PID 控制被更广泛地应用于需要进行手动/自动切换的场景下,如工业厂房空调控制系统。
2.1.3 PID 算法仿真模型
直接应用Simulink 中PID模块,建立仿真模型如图4 所示。根据经验进行整定并微调后,确定PID参数分别为:15、0.3、0。
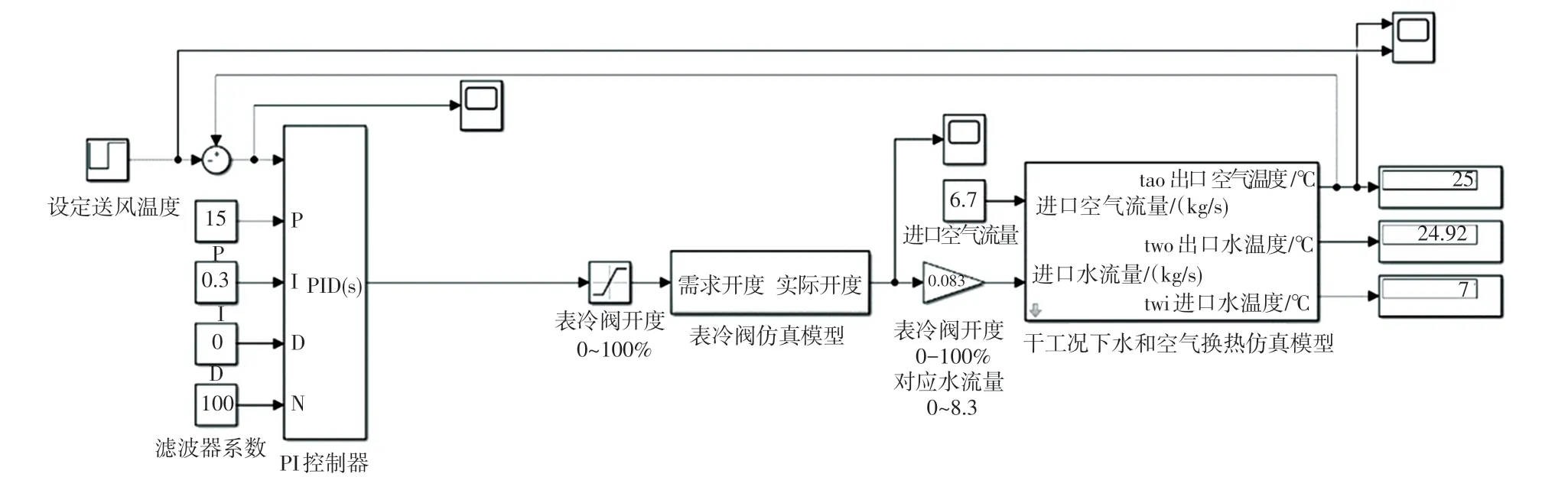
图4 PID 算法仿真模型Fig.4 PID algorithm simulation model
2.2 模糊PID 算法
模糊PID 算法通过对PID 各系数进行修正,使得在系统发生一系列变化后,控制效果始终能够收敛于最佳PID 参数配置。
修正公式(7)~(10)如下:
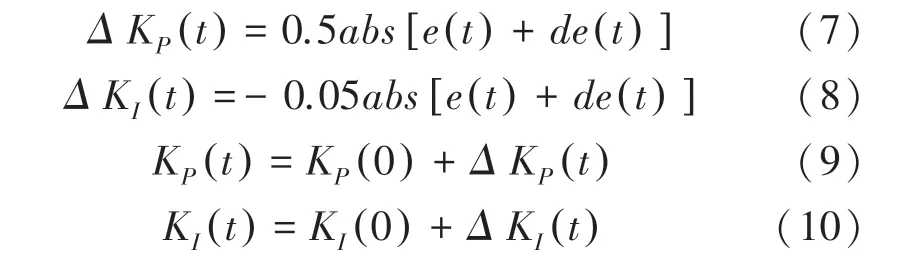
其中, K(0) 为K初始值, K(0) 为K初始值。
模糊PID 算法仿真模型及控制器内部结构如图5和图6 所示。
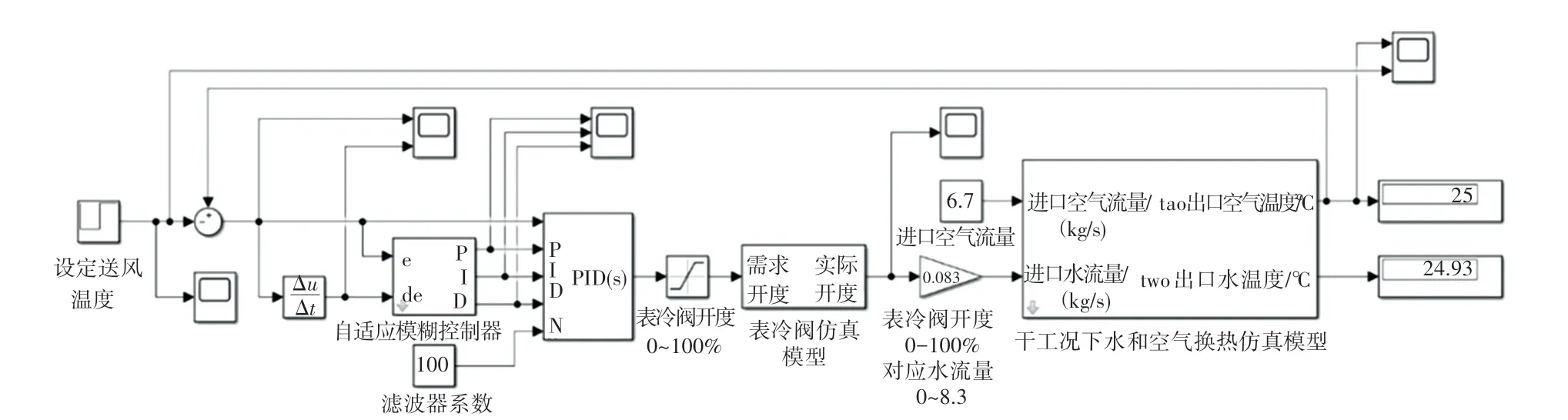
图5 模糊PID 算法仿真模型Fig.5 Fuzzy PID algorithm simulation model
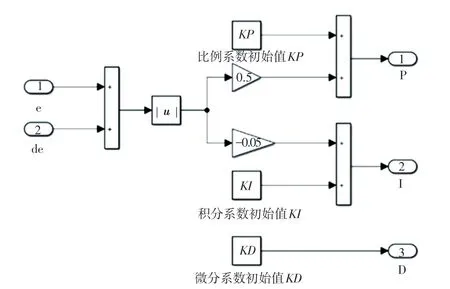
图6 模糊控制器内部结构Fig.6 Internal structure of fuzzy controller
3 P+PI 算法描述及运行结果对比
3.1 P+PI 算法描述
由公式(2)可知,水侧能量交换的大小取决于水流量和进出水温差。在风量和新风温度不变的情况下,进出水口的温差受到水流量的影响。瞬时状态下,水流量增大,则进出水温差迅速减小,且二者不是纯粹的线性反比关系;在水流量稳定后,随着时间的推移,送风温度逐渐降低,而进出水口的温度差又会逐渐回升,最终达到动态平衡。
表冷阀的开度会同时影响到水流量和进出水温差,如果直接通过PID 算法控制表冷阀的开度,容易出现由于积分饱和现象带来的过高超调,即使采用模糊控制进行优化也无法完全避免这种情况的发生。
因此,本文换一个角度看待控制对象。首先,如果整个系统处在平衡状态,则表冷器内平均温度一定与送风温度值差别不大,且略低于送风温度;其次,在系统运行过程中,如果表冷器内平均温度已经处在较低的状态下,继续加大表冷阀开度并不会使得空气降温更快,反而在出现超调时,由于表冷阀的阀位控制本身具有滞后性,再加上即使表冷阀调节到位,冷冻水对空气的降温过程仍会进一步滞后,带来的连锁反应会导致整个系统很难维持稳定。
如果以表冷器内的平均温度作为控制对象,当温度降低至合理范围内,表冷阀阀位将不再由于积分现象而继续增大,由此避免出现积分饱和现象。而且一旦出现超调,无论从表冷阀的反应速度,还是冷冻水对空气的降温效应来看,滞后都会明显减小。
P+PI 算法的公式描述,式(11)~式(14):
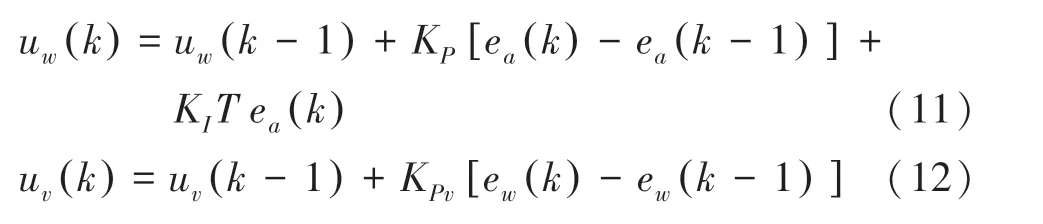


经反复调试整定, K在本次仿真中的最优值取0.5,K和K的取值为15、0.3。P+PI 控制系统仿真模型如图7 所示。
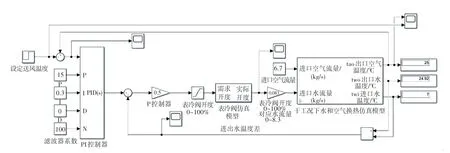
图7 P+PI 控制系统仿真模型Fig.7 P+PI control system simulation model
3.2 不同控制算法仿真运行结果对比
对比传统控制方法和经过优化后的控制方法的运行结果,曲线图如图8~图10 所示。以空气温度为控制对象,需求温度以400 ms 为变化周期,形成连续阶跃信号,测试不同控制方法下实际空气温度的连续阶跃响应结果。可以看出,P+PI 算法控制相较于其他两种控制算法震荡更小,控制精度更高,达到了预期的优化效果。

图8 增量式PID 控制仿真运行结果Fig.8 Incremental PID control simulation results
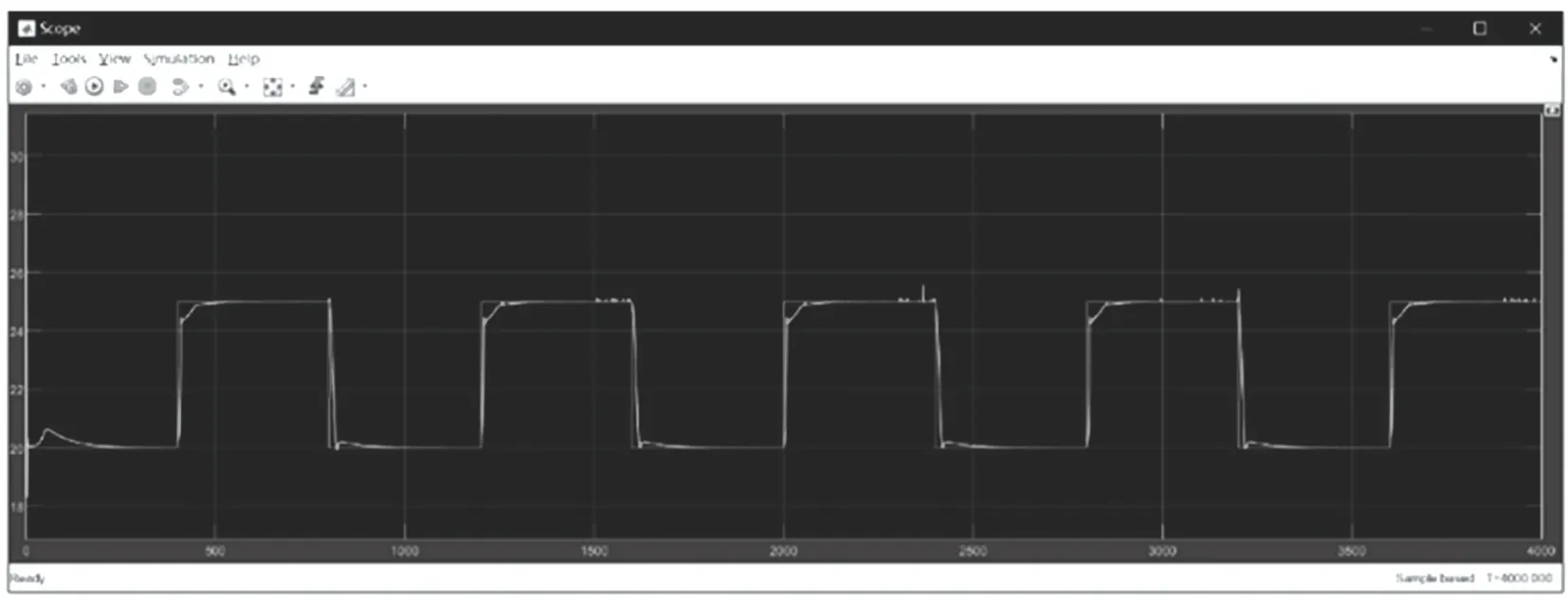
图9 模糊PID 控制仿真运行结果Fig.9 Fuzzy PID control simulation results
图10 P+PI 控制仿真运行结果Fig.10 P+PI control simulation results
3.3 某厂房中央空调控制软件项目实际运行效果对比
PI 控制经过反复调试后,能将单点温度波动控制在±1.5 ℃以内,而P+PI 控制可以控制温度波动在±0.5 ℃内,如图11、图12 所示。
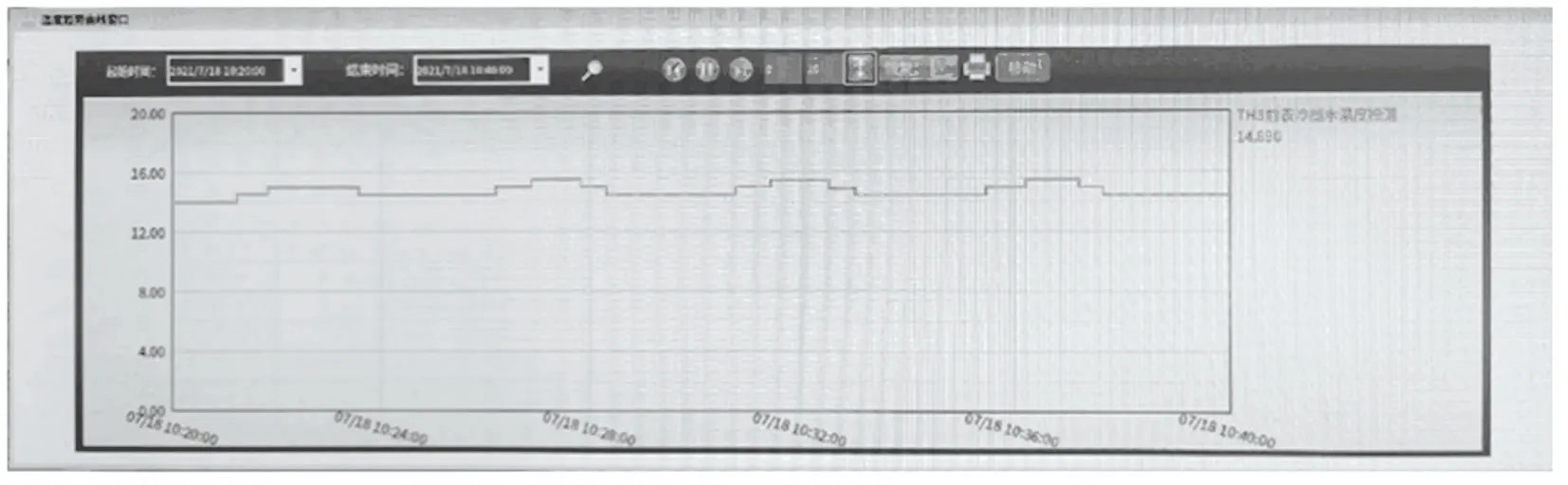
图11 PI 控制实际运行结果Fig.11 PI control actual operation result
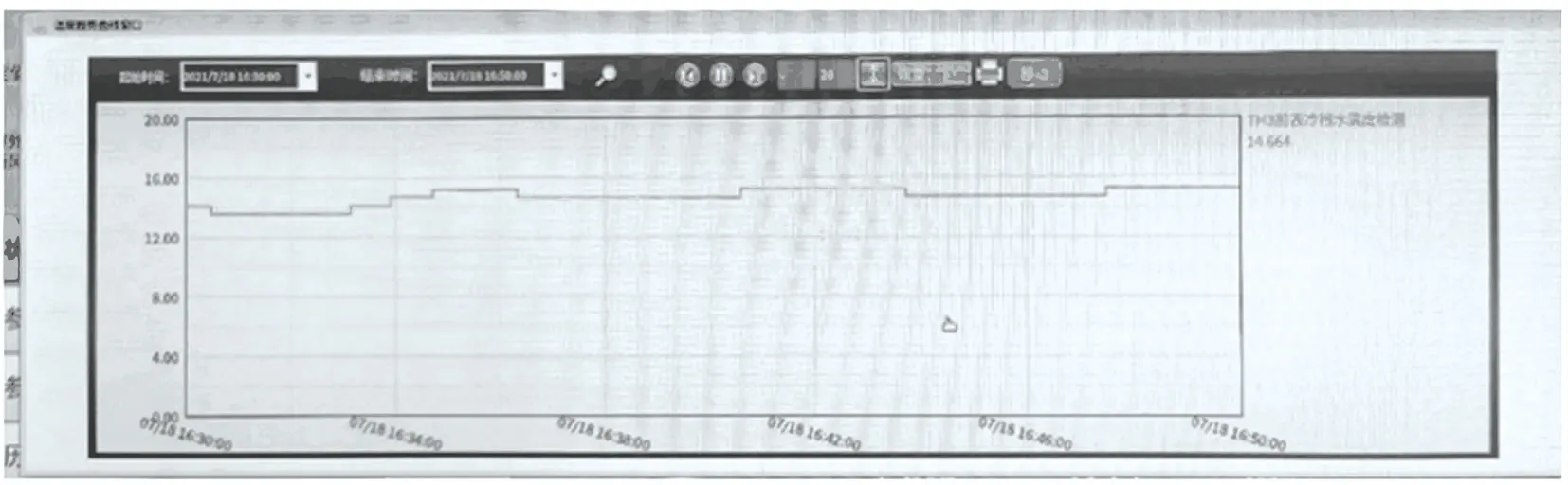
图12 P+PI 控制实际运行结果Fig.12 P+PI control actual operation result
在蒸汽加热系统下,输入量为从锅炉房送出的高温高压水蒸气,温度在130 ℃~370 ℃范围内,压强在0.1~1.5 MPa 范围内不规则波动。经过减压阀和稳压阀等一系列稳定措施后,输入蒸汽的压强波动仍达到了±0.2 MPa,其温度波动为±20 ℃。采用PI 控制器直接进行控制会出现剧烈震荡,被控对象温度波动可能会达到±2 ℃,该控制精度低于场区舒适性中央空调的最低标准。
P+PI 控制算法在输入量波动较大的系统中,对控制稳定性的优化尤为明显。在本系统中,P+PI控制器作用于蒸汽阀门开度,并通过散热盘管内的蒸汽压强间接控制送风温度,将其波动缩小到了±0.2 ℃,如图13 所示。
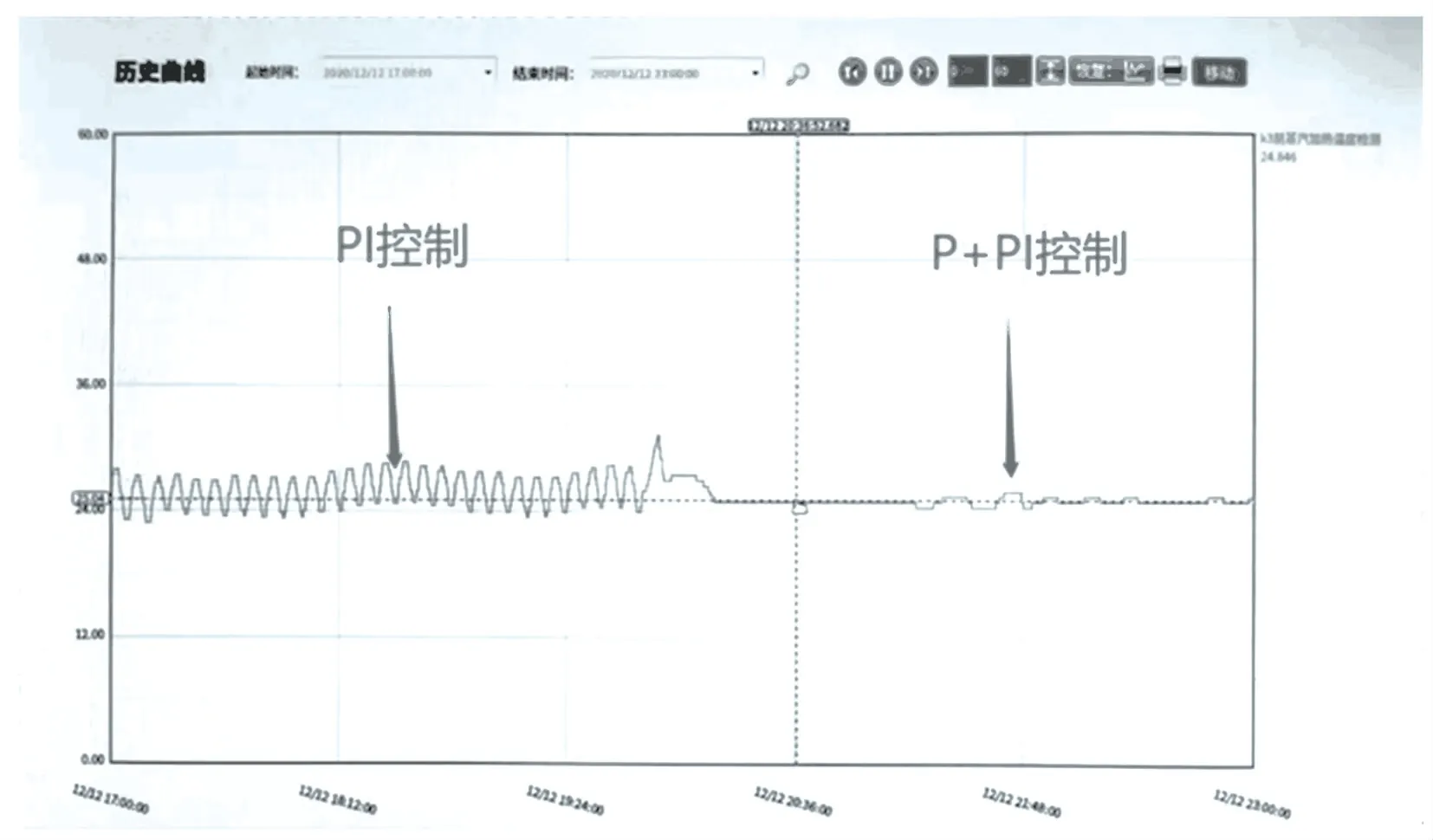
图13 P+PI 控制在某厂房蒸汽加热系统中的扩展应用案例Fig.13 An extended application case of P+PI control in the steam heating system of a plant
4 结束语
P+PI 控制算法的调整参数由原来的P、I、D 3个,增加了一个Pv,共4个参数,从根本上解决了传统PID 控制算法中控制对象反应滞后的问题。在Simulink 仿真环境下可以看出,P+PI 算法大幅消除了调整过程中的高频振荡,保护表冷阀免受不必要的磨损、延长使用寿命,且无论从反应速度、超调高度还是收敛速度等多个方面的指标都优于传统控制算法。
在未来更复杂的控制场景、更高的控制精度要求下,P+PI 间接控制算法仍有进一步扩展的空间,可根据实际应用场景的特点进行适应性改造。在其他领域,如:家用空调、恒温恒湿机组、回转平台、吊车、消防、自动驾驶等涉及到滞后控制的系统中也可以得到广泛应用。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:35:20
青海电力(2022年1期)2022-03-18 12:08:36
应用化工(2021年12期)2021-02-21 07:24:12
航空发动机(2020年1期)2020-06-13 06:18:38
制冷(2019年2期)2019-12-09 08:10:42
电子测试(2018年6期)2018-05-09 07:32:20
综合智慧能源(2015年1期)2015-06-05 14:56:40
智能建筑电气技术(2015年1期)2015-03-01 03:08:00
汽车零部件(2014年11期)2014-09-18 12:04:41
机电信息(2014年19期)2014-02-27 15:53:16
