
基于PID的高速气浮电主轴转子动态控制算法
2022-03-01 06:04:14陈运胜孙令真
智能计算机与应用 2022年1期
陈运胜,孙令真
(广州华立科技职业学院,广州 511325)
0 引言
高速气浮电主轴转子是车辆动力传动系统以及大型船舶动力系统的重要部件,在高速气浮电主轴转子运行中,受发动机波动及转矩误差参数的影响,导致减振稳定性、整个机械装置输出稳定性控制能力欠佳。因此,需要构建优化的高速气浮电主轴转子控制模型,结合动态控制和参数补偿调节的方法,实现高速气浮电主轴转子的动态控制,改善车辆动态特性。采用人工智能控制和参数稳态跟踪测量方法,进行高速气浮电主轴转子的动态控制。研究高速气浮电主轴转子的动态控制方法,在提高机械装置特别是车辆及船舶动力系统装置稳定性方面具有重要意义。
传统方法中,对高速气浮电主轴转子动态控制方法主要有反馈跟踪方法、反演积分方法、自适应特征测量方法等。构建高速气浮电主轴转子误差参数识别模型,结合参数自适应调节,可实现动态控制和参数稳定性跟踪,但传统方法进行高速气浮电主轴转子动态控制的输出稳定性不好,自适应控制能力不强。针对上述问题,本文提出基于PID的高速气浮电主轴转子动态控制算法。首先建立了控制参数分析和控制对象模型,然后进行气浮电主轴转子动态控制律的优化设计。最后的仿真测试结果,展示了本文方法在提高高速气浮电主轴转子动态控制能力和稳定性方面的优越性能。
1 控制参数模型和结构对象分析
1.1 控制参数模型
采用姿态传感器感知的方法,实现对高速气浮电主轴转子物理参数采集。以气动载荷、离心力载荷以及叶片转动的气动力分量等为约束参数,构建高速气浮电主轴转子的控制参数模型,得到传动系统的扭转振动误差补偿函数,采用三阶自相关特征分析,得到高速气浮电主轴转子物理参数表达模型可表示为:


考虑磁浮迎风气流,通过计算高速运行时受到的气动升力,得到磁浮系统二级悬挂动态补偿模型表示为:


采用PID 变结构神经网络结构模型,构建高速气浮电主轴转子动态稳定性参数融合模型,得到磁浮系统非线性响应扰动输出稳态特征量:

用增量谐波平衡法,得到磁浮系统非线性响应的拟合分量为:

设稳定悬浮的平衡位置参数,通过定常和非定常气动参数分析,构建高速气浮电主轴转子动态扰动控制模型,得到参数自适应调节输出分量为:

式中:r()为稳定悬浮间隙输出的给定值; y()为系统被控量;为气动升力条件下的磁浮控制序列序号(1,2,…,);为PID 神经网络输入层序号(1,2)。
根据上述控制参数模型设计,结合二系悬挂刚度参数分析,进行控制方法优化设计。
1.2 控制对象模型分析
采用姿态误差补偿和喘振自适应控制的方法,进行高速气浮电主轴转子的输出稳定性参数调节,计算电磁铁悬浮间隙,采用比例微分控制器,得到垂向运动方程式为:

应用IHB 法计算磁浮控制稳定性参数,得到稳态的周期解:

式中,η为固定气动力振幅下的学习步长。
根据姿态误差的输出差异性,进行稳定性补偿。结合喘振的传感跟踪识别,建立自适应控制对象模型,进行高速气浮电主轴转子的输出稳定性参数调节,参数稳定修正误差为:
系统发动机输出后端姿态角为:

根据上述分析,采用姿态误差补偿和频带输出稳定性控制,实现控制对象优化设计。
2 气浮电主轴转子动态控制算法
2.1 PID 变结构控制模型
在构建高速气浮电主轴转子控制对象模型的基础上,进一步采用PID 变结构控制的方法进行算法设计,建立稳态控制律,提高控制稳定性。在此,引入六缸发动机谐次,得到气浮电主轴转子动态控制的PID 隐含层至输出层权重值:


利用拉格朗日方程,隔振器系统的振动测量方程表示为:

根据振动测量结果,采用修正的PID 控制算法,得到各个惯量的角位移,引入位移补偿函数,实现气浮电主轴转子动态控制的参数修正。
2.2 控制律优化设计
结合控制律的反馈补偿方法,在PID 控制器的输入端,采用自适应学习方法进行反馈跟踪及模糊PID 神经网络控制,得到气浮电主轴转子的振动响应自适应控制模型为:


综上处理,实现高速气浮电主轴转子动态控制算法和控制律的优化设计。在动力传动系统减振过程中进行姿态及位姿参数的稳定性调节和实时补偿控制,提高高速气浮电主轴转子动态参数调节能力和可靠性控制能力。
3 实验测试
为了验证本文方法在实现高速气浮电主轴转子动态控制中的性能,采用Matlab 仿真方法进行仿真测试,采用MPU6050 姿态传感器进行数据采集,采集样本长度为1 024,固有频率为102 KHz,控制器的中央处理器为STM32F103RCT6,仿真参数设定见表1。

表1 仿真参数设定Tab.1 Simulation parameter setting
根据表1的参数设定,进行高速气浮电主轴转子动态传感信息采集,其结果如图1 所示。
以图1的数据为研究对象,测试稳态控制性能,控制稳定性输出结果如图2 所示。
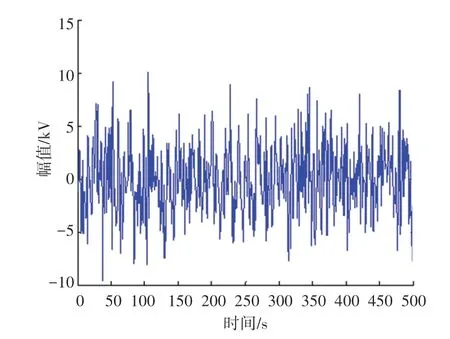
图1 数据采集时域波形Fig.1 Time domain waveform of data acquisition
分析图2 得知,本文方法进行高速气浮电主轴转子动态控制的输出稳定性和收敛性较好。对比控制精度,结果见表2,分析表2 得知,本文方法进行高速气浮电主轴转子动态控制的收敛精度更高。

图2 控制稳定性输出Fig.2 Control stability output

表2 控制精度对比测试Tab.2 Comparative test of control accuracy
4 结束语
结合动态控制和参数补偿调节的方法,实现高速气浮电主轴转子的动态控制,改善车辆动态特性。本文提出基于PID的高速气浮电主轴转子动态控制算法。构建高速气浮电主轴转子的控制参数模型,采用姿态误差补偿和喘振自适应控制的方法,进行高速气浮电主轴转子的输出稳定性参数调节,在动力传动系统减振过程中进行姿态及位姿参数的稳定性调节和实时补偿控制。分析得知,本文方法进行高速气浮电主轴转子控制的动态稳定性较好,精度较高。
猜你喜欢
房地产导刊(2022年5期)2022-06-01 06:19:40
建材发展导向(2022年6期)2022-04-18 08:17:28
飞控与探测(2022年6期)2022-03-20 02:16:14
建材发展导向(2021年7期)2021-07-16 07:07:40
力学学报(2020年4期)2020-08-11 02:32:12
制造技术与机床(2019年7期)2019-07-22 03:42:58
制造技术与机床(2017年7期)2018-01-19 02:29:58
制造技术与机床(2017年8期)2017-11-27 02:10:11
黑龙江电力(2017年1期)2017-05-17 04:25:08
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:33
