“多位一体”模式下机械设计课程教学方法研究
2022-02-27 07:36俞成涛谢文涛
科教导刊·电子版 2022年33期
邱 睿,俞成涛,谢文涛
(江苏理工学院 机械工程学院,江苏 常州 213001)
随着工业科技水平的不断提升,企业对科技创新性人才的需求也日益增加。相对传统教学模式而言,仅仅依靠课堂理论教学的模式无法满足培养学生多学科交叉综合能力的培养[1-2]。机械设计是工科专业的核心课程,既是专业人才培养的基础课程,又是相关专业课程学习的前期保障,其课程重要性不言而喻[3-4]。如何使学生理解、掌握机械设计的核心思想,并根据实际工程问题提出设计目标和改进方案,是机械设计课程教学目标之一。因此,建立“多位一体”教学模式对机械设计课程的建设具有重要的实践教学意义。
国内外相关学者针对新工科背景下机械类专业人才培养教学模式进行了研究与探索。颜秋艳[5]针对机械设计课程教学模式进行了优化与改进,将先进结构分析方法引入到机械设计课程中,并进行了教学案例设计。潘承怡[6]基于工程认证标准,提出了机械设计课程的教学质量评价方法,对学生能力及课程掌握情况进行合理统计。关跃齐[7]将OBE理念引入到机械类学生培养体系中,通过课程环节的设计与布局有效提高了学生的学习自主性和积极性。陈宇[8]考虑了运动副间隙微观几何特征,以机械设计课程中曲柄滑块机构为例,分析了运动副间隙对机构动力学特性的影响关系,为机械典型机构设计提供了理论依据。Lin[9]以滑动轴承设计为了,开展了沟槽结构特征对轴承润滑特性的影响研究,为机械设计课程中轴承设计内容提供了较好的案例。由上述分析可见,目前针对“多位一体”模式的机械设计课程建设研究较少。
本文针对上述内容,综合传统机械课程教学方法,以提升学生综合实践能力为教学目标,开展“多位一体”模式下机械设计课程教学方法研究,以求优化课程内容的基础上增加学生自主学习的能动性,提高教学质量。
1 “多位一体”模式教学方法设计
将机械类相关课程内容和先进设计技术引入到机械设计教学中,建立“多位一体”模式的机械设计课程教学方法,其流程图如图1所示。在课前准备过程中,根据教学背景、教学目标、教学重点与难点对教学内容进行知识点分解,根据教学内容制定学生能力培养目标,并结合教学内容进行合适的教学方法设计。在教学过程中,将实验教学内容设计、工程实例仿真分析设计、课程设计等方式引入到理论知识讲解中,使学生在知识点学习的过程中增加综合能力素质的培养,完善工程认证人才培养体系目标。课后组织学生开展拓展训练,其模式可包含理论计算、实验数据分析、实践训练等,该过程在巩固学生对课程知识点的掌握,并能挖掘学生潜力。同时,围绕机械设计课程教学大纲,提出“N+1”课程考核体系,全面掌握学生各方面学习程度,为课程教学设计改进提供基础。
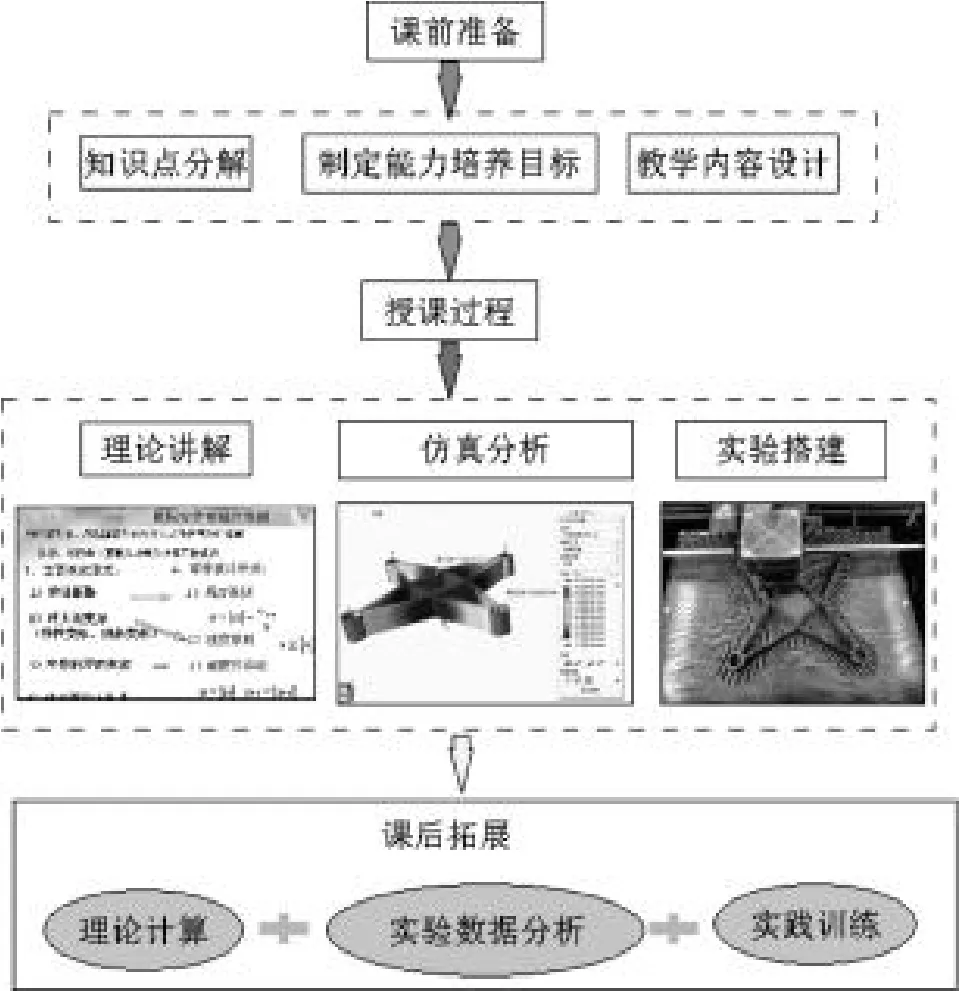
图1 “多位一体”教学方法
2 教学实例设计
本文以机械设计课程中机械零件设计方法内容为例,具体说明“多位一体”模式下机械设计课程教学方法设计过程。
2.1 理论知识讲解
机械零件作为机器重要的组成部分,其设计合理性与结构特征对机器性能会产生决定性影响。如何将传统机械设计方法与现代机械设计方法有效结合,实现机械零件性能最优化是机械零件设计方法中需要考虑的重要问题。
对于机械零件来说,首先需要考虑的是失效问题,常见的失效形式包括:整体断裂、过大的残余变形、零件表面破坏以及破坏正常工作条件引起的失效。为了保证设计的机械零件具有安全性和可靠性,在机械零件设计过程中制定了相关设计准则,其中最为重要的就是强度准则,其表达式为:
其中,应力表达式可写成:
为了保证所设计的零件具有一定的可靠性和安全性,零件所受应力应当小于材料许用应力值,可以引入安全系数计算值的概念对其安全性进行评估,故其关系式可写为:
根据工业技术的提升和现代设计方法的要求,轻量化设计已经成为机械零件设计过程中不可或缺的一部分[10]。根据轻量化设计目标及要求,在机械零件设计时需要提出相应的目标函数及约束条件,其表达式为:
2.2 工程案例设计与分析
为了加深学生对机械零件设计方法的认知,本文选择四旋翼无人机机身为研究对象,对其轻量化设计流程及其力学特征进行分析。四旋翼无人机初始设计模型如图2(a)所示,4个机翼支承座产生向上拉力,而承载物体会对机身产生向下拉力,故四旋翼无人机受载模型如图2(b)所示。
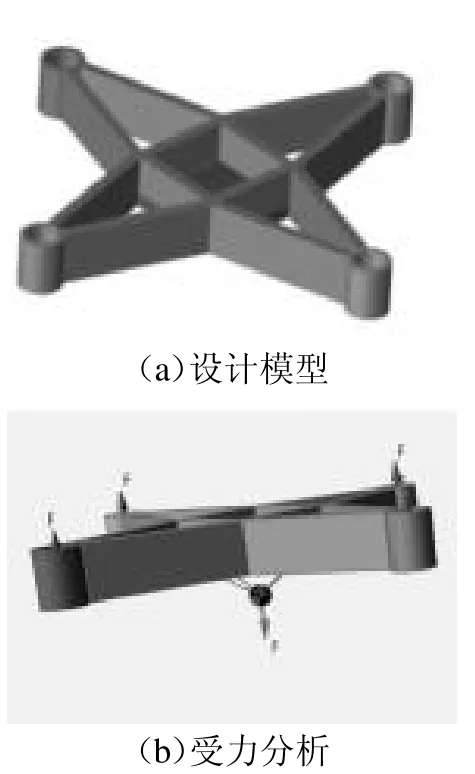
图2 四旋翼无人机设计模型和承载情况
针对上述仿真计算边界条件,对四旋翼无人机进行静力学计算,获得机身米塞斯等效应力分布特征、位移分布特征及安全系数等特征计算结果。其中,四旋翼无人机最大变形出现在机翼支架处,最大值为0.2313mm,最小安全系数为14.7出现在机身行架连接处,最大米塞斯等效应力为3.064MPa,出现在机身行架焊接处,这是由于负载质量点在中心位置所引起,该点位置距离负载质量点较近。模型质量为66.16g,原结构性能有较大冗余,可进行轻量化设计。
根据上述计算结果,以减轻机身重量为设计目标,基于拓r优化法对及机身进行轻量化设计。在机身模型轻量化设计时,以最大化刚度为前提,要求四旋翼无人机最大变形位移小于0.8mm,且最小安全系数大于2.5。基于PolyNURBS拟合法对模型微观几何特征进行优化建模,完成四旋翼无人机轻量化设计模型,如图3(a)所示。

图3 轻量化模型
在此基础上,对四旋翼无人机轻量化模型进行力学性能分析,仿真参数设置与前文保持一致,其计算结果如图4所示。由计算结果可知,四旋翼无人机的轻量化设计模型最大位移为0.7991mm,出现在螺旋桨支承座上,最大米塞斯等效应力为15.21MPa,出现在机身桁架连接处,最小安全系数为3.0,出现在机身桁架连接处,质量为29.776g,轻量化模型完全满足设计要求,实现减重54.99%,设计方案可行。
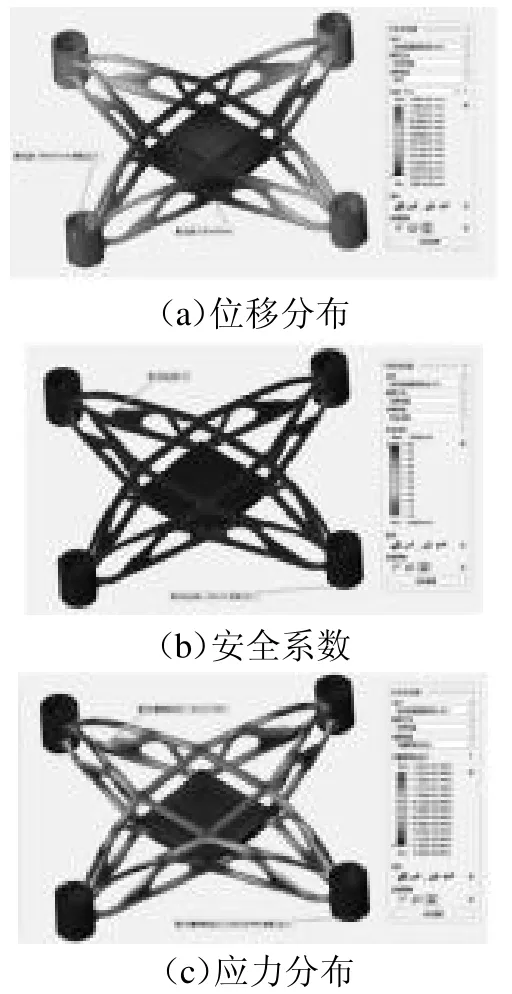
图4 轻量化模型仿真分析结果
利用3D打印机完成初始模型和轻量化模型的打印制作,让学生熟悉打印过程和模型参数设置,初始模型和轻量化模型打印件如图5所示。
图5 模型3D打印制作
基于本课程学习,学生较好地掌握了机械零件的常规设计方法及现代设计方法,并能将其运用到实际工程模型设计中,结合最新的3D打印成形技术,提升了工程实践综合能力。
3 结论
本文以机械设计课程为例,提出了“多位一体”模式的课程教学方法,增加了课程教学的多样化模式,并以机械零件设计方法为例说明了该方法的具体设计流程。研究结果表明,“多位一体”模式的教学方法可以增加学生课程学习兴趣,在实践过程学习中挖掘学生潜力,培养学生“看,做,想”的综合能力素质,并改善传统教学方法中的不足。
猜你喜欢
精密成形工程(2022年2期)2022-02-22
北京航空航天大学学报(2021年9期)2021-11-02
家庭影院技术(2021年6期)2021-07-28
军民两用技术与产品(2021年9期)2021-03-09
疯狂英语·新悦读(2019年9期)2019-09-21
电子制作(2019年9期)2019-05-30
摄影之友(影像视觉)(2017年8期)2017-11-27
北京航空航天大学学报(2016年8期)2016-11-16
专用汽车(2016年1期)2016-03-01
专用汽车(2015年4期)2015-03-01