仿生柔性按摩机器人的设计与实现※
2022-02-27 09:35彭金婵陆春辰李彦博张鸿天范新巍李继安
中国民间疗法 2022年24期
彭金婵,陆春辰,李彦博,张鸿天,范新巍,李继安
(华北理工大学,河北 唐山 063210)
1 研究背景
1.1 中医按摩的意义及存在的问题 中医按摩是在人体体表运用各种手法及某些特定的肢体活动防治疾病的中医外治法,具有运行气血、舒筋活络、提高免疫力的作用,是中医学的重要组成部分。先秦时期即有关于中医按摩的记载,《周礼注疏》云:“扁鹊治虢太子暴疾尸厥之病,使子明炊汤,子仪脉神,子术按摩。”秦汉时期,随着中医学的发展,中医按摩已发展为具有一定特色的学科,出现了我国历史上第1部按摩专著——《黄帝岐伯按摩经》。宋金元时期,中医按摩临床诊疗技术不断丰富。清代太医院教科书《医宗金鉴》总结出摸、接、端、提、按、摩、推、拿伤科八法。迄今为止,中医按摩已积累了大量的临床实践经验。中医按摩主要治疗各种慢性疾病,如颈、肩、腰、腿痛及中风后遗症等,并且有预防保健作用。该疗法操作简便,效果良好,是现代社会人们普遍接受的一种治疗方式,但需要医患进行一对一治疗,不仅耗费人工,而且对按摩师的技术要求也较高,按摩师需经过系统的学习和实训。目前,中医按摩市场存在技术不过关及经营不规范等问题,不仅难以起到治疗作用,还可能造成患者肢体软组织损伤、关节脱位、骨折,甚至高位截瘫等不良后果,严重危害患者的身体健康。
1.2 研制仿生柔性按摩机器人的必要性 随着世界人口老龄化进程加快及人们生活工作方式的变化,慢性肌肉骨骼疼痛(chronic musculoskeletal pain,CMP)的发生率逐年升高,给患者造成身心痛苦,并给家庭、社会带来沉重的经济负担。如何应对严峻的CMP高发问题,提高国民体质,改善其生活质量已成为当今社会关注的焦点。结合智能技术,开发便于居家应用及基层医疗机构使用的新型智能康复治疗器械是较为有效的途径[1]。随着科技的迅速发展,应用智能化按摩机器人模拟高级按摩师的技术已成为可能,开发智能机器人以解决患者多、专家少、诊疗复杂、治疗效果不佳等现实问题,可满足当前广大中老年人健康保健及治疗慢性疼痛疾病的诊疗需求。因此,研制新型便捷式按摩机器人迫在眉睫。
现有按摩机器人主要存在以下问题。首先,机器人以模拟按摩手法运动轨迹为主,缺乏对患者体征的有效检测和按摩方式的优化分析,以经络、穴位为治疗模型的手法调理效果仍难以满足不同人群的个性化需求[2]。其次,由于按摩技艺具有连续性、节律性、动态调控等特点,传动装置和执行装置的动态响应、灵活性和稳定性还有待提高。
2 按摩机器人国内外研究现状
2.1 国外研究现状 中医按摩及医疗服务机器人已获得世界各国的关注,其中以日本、韩国和法国等国家为主要开发群体,其凭借先进的研发技术及资源优势,开展了大量的中医按摩及医疗机器人的临床研究。1996年,日本三洋电机有限公司机电一体化研究中心KUME M等[3]发明智能机械按摩疗法操作单元(MTU),验证了智能人形按摩手臂机器人的可行性。2006年,日本丰桥技术科学大学和岐阜大学工业高等专门技术学校MINYONG P等[4]研制仿人多手指按摩机器人,其按摩功能更为多样。2007年,日本早稻田大学和日本朝日大学牙科院KOGA H等[5]发明面部皮肤康复按摩机器人 WAO-1,帮助颌骨病患者缓解症状。2020年,KICKSTARTER发明了个人头戴式太阳穴及眼角按摩仪LEROU Robot,不仅舒适便携,同时具备长续航、高性价比等多种优势。2020年,英国普利茅斯大学和法国CapSix Robotics公司的研究人员研制出可以提供个性化按摩的机器人。由此,笔者认为借鉴国际按摩机器人技术、人工智能技术,并结合中医理论及按摩手法开发新一代中医智能按摩机器人是一个具有前景的研究方向。
2.2 国内研究现状 国内按摩机器人的研究侧重于设计人体机械按摩结构和分析人体按摩操作手法原理。2004年,江苏大学与厦门集美大学机械工程学院共同设计了1款新型医用自动推拿按摩机器人[6]。2008年,在国家“863”计划支持下,山东建筑大学开展对中医按摩机器人的研究,实现从理论到样机的研制[7]。2014年,北京理工大学智能机器人研究所研制了1款中医按摩机械臂,其具有4个自由度,能够完成点按、指揉、弹拨3个按摩手法动作,实现卧式和坐式两种按摩方式[8]。2020年,奥佳华AI按摩机器人在业界率先采用NIDEC无刷电机,搭载四核处理器,协同毫米级精度传感器,采用新一代无刷变频温感机芯,并配备皮电反应传感器与脉搏血氧传感器,可快速检析人体多项疲劳指数,配合用户基本身体指标,解读人体生理参数。
3 仿生柔性按摩机器人的结构设计及功能
3.1 主体结构 支撑架是承载所有工作单元的框架,同时也负责按摩过程中人与按摩机器人在坐标轴的位移运动,是保证按摩机器人在按摩过程中精度的根本,其主要构成包括主体机架、防滑轮组、驱动电机及其可替换组件3个部分。见图1。
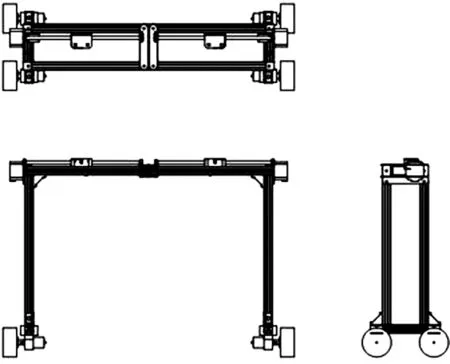
图1 仿生柔性按摩机器人支撑架主体结构示意图
主体机架由型材与角铁组成,在材料性质上具有高稳定性、高强度、高安装精度的优点。此外,主体机架易拆装,拆后可以大幅度缩小体积,方便运输。主体机架高度调节范围参考中国成年人身材数据范围设计(18~60岁男性的胸厚范围为176~261 mm,18~55岁女性的胸厚范围为159~260 mm)[9],有效地提升了按摩机器人对于不同身材患者的兼容性。防滑轮组采用GM25BLDC直流无刷齿轮减速电机配合胶轮。采用胶轮而不是更加灵活、精准的麦克纳姆轮,是因为胶轮与绝大部分家具材料都有较大的相对摩擦,不易发生位移,能保证在按摩过程中不会因为反作用力影响按摩精度。驱动电机采用42BYGH步进电机,该电机转速均匀,输出稳定,并且便于控制。电机输出端连接同步轮、同步带,同步带上设有一个3D打印件,可根据患者的不同症状及需求替换末端执行器,进行按摩、拔罐、艾灸3种功能模块的更换[10]。
3.2 按摩模块 按摩的主要手法包括按、摩、推、拿等,人手实施手法,需要依靠多根手指及掌面的配合[11]。笔者将按摩机器人的按摩手掌简化为两根由电动推杆驱动的柔性按摩手爪及配合振动马达的软胶柔性手掌组成的复合机构。42 BYGH步进电机驱动同步带,用光轴进行虚约束,以进行不同按摩部位高度的控制。具有3个自由度的球铰可以保证角度贴合[12]。按摩手掌整体结构见图2。
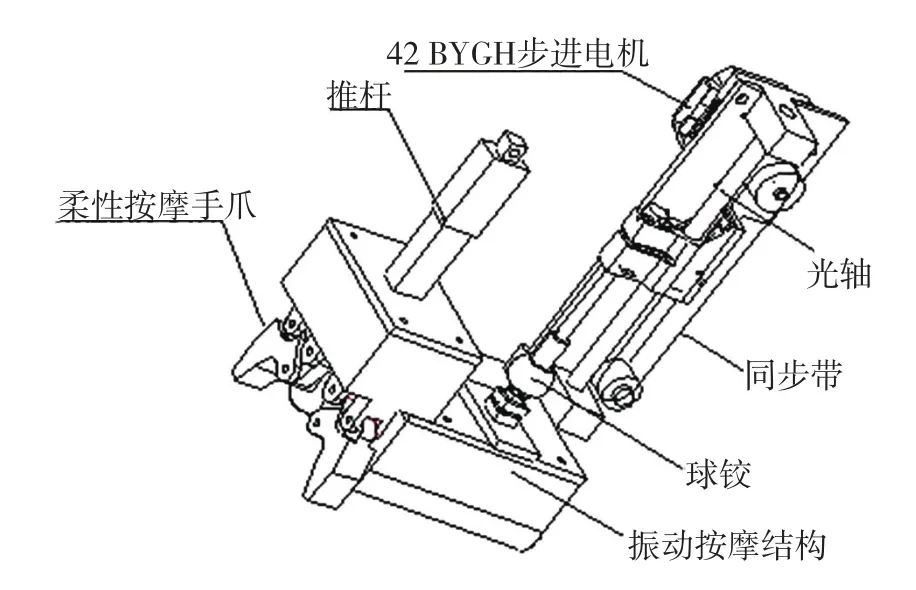
图2 仿生柔性按摩机器人按摩手掌结构示意图
3.3 拔罐模块 拔罐模块的整体操作流程分为抽气与拔罐两个阶段。抽气阶段使用42 BYGH步进电机对气泵进行反复牵引[13]。拔罐时电机增大输出,使弹簧压缩,气泵突破,实现拔罐的目的。研制过程中需要通过多次实验确定气泵的力度,再结合电机的输出进行受力分析,进行弹簧的选型。气罐拔罐整体结构见图3。
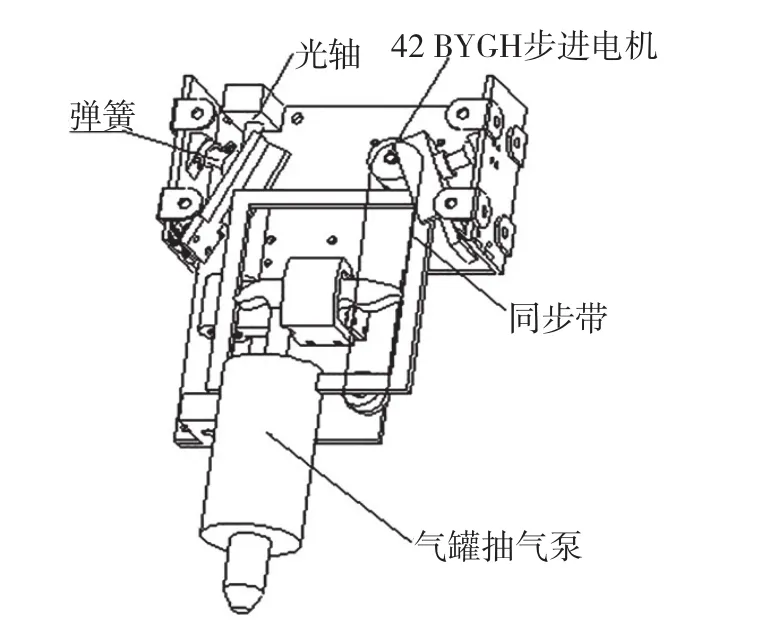
图3 仿生柔性按摩机器人气罐拔罐装置结构示意图
3.4 艾灸模块 艾灸模块以光轴进行方向上的指引,以同步带进行驱动,以球铰校正人体表面凹凸产生的角度差,进而实现艾灸操作[14]。使用市面上常见的艾灸盒绑扎固定,方便替换。艾灸整体结构见图4。
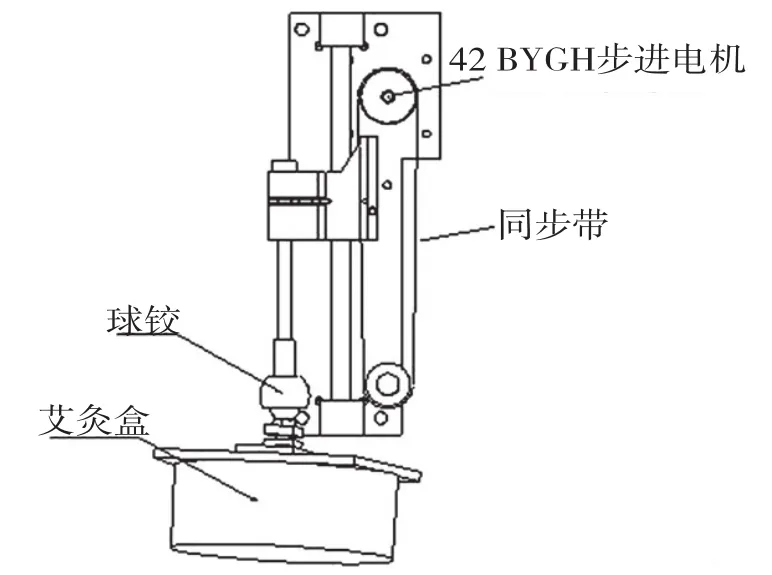
图4 仿生柔性按摩机器人艾灸装置结构示意图
4 仿生柔性按摩机器人的控制系统设计
4.1 硬件控制系统设计 在设计过程中,为了使按摩机器人具有较小的体积及对地映射面积,单纯使用步进电机和舵机并不能满足相应需求。因此在硬件的整体移动部分,与地面接触面采用直流减速驱动以达到X轴向移动,上层采用步进电机驱动以达到Y轴向移动,同时上层使用可以带动向上、向下的步进电机以达到3个自由度的移动效果[15]。基于stm32的柔性按摩系统控制部分由电源管理、直流电机驱动、步进电机驱动、无线蓝牙模块组成[16]。直流电机部分采用60∶1的25GA-370直流减速电机,电机驱动器采用L298N,使用pwm控制L298N保证稳定输出较高的电流。步进电机驱动部分采用A4988步进电机驱动模块驱动42BYGH40S步进电机[17]。无线蓝牙模块采用HC-05通过uart与单片机进行通信,手机与HC-05无线连接以控制步进电机。硬件控制系统见图5。
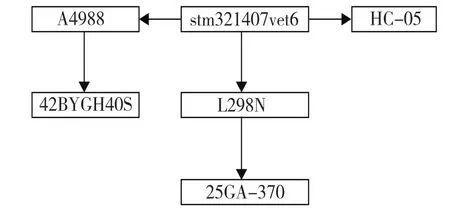
图5 仿生柔性按摩机器人硬件控制系统示意图
4.2 软件系统控制设计 按摩机器人主控制器采用stm32的单片机系统,系统上电之后执行初始化程序,检测电池电量,如果不足则提示电量过低,检测减速直流电机和步进电机是否处于连接状态,检测蓝牙是否处于连接状态,初始化程序执行完毕表示系统正常,可以使用手机蓝牙对按摩机器人进行操作[18]。软件控制系统见图6。
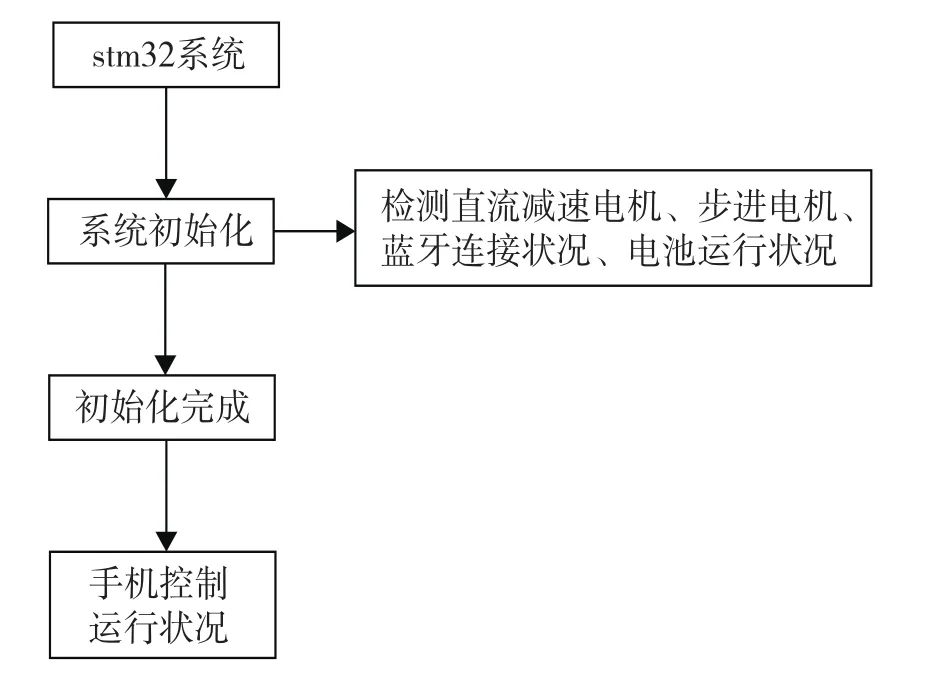
图6 仿生柔性按摩机器人软件控制系统示意图
5 仿生柔性按摩机器人的样机制作及实验研究
5.1 仿生柔性按摩机器人原理样机的制作 前期原理实验顺利,笔者直接将仿生柔性按摩机器人原理样机进行简易改装、组合,形成现在的样机。仿生柔性按摩机器人是将多种已有成熟框架的机体进行组合的再创造机器人。主体机架运作模式类似于3D打印机,但并不需要3D打印机的超高精度。因此,笔者在其基础上进行了简化以降低成本,舍弃了底部的丝杆,使用更廉价、更方便的胶轮与电机,从而以较低成本实现较高精度及较高强度的运动。
5.2 仿生柔性按摩机器人性能评估实验 中医按摩力度范围为40~60 N,笔者选取最大输出力为60 N的电动推杆,通过调节电流大小改变其力度的输出。因为其结构简单且是直接链接,所以功率的损失极小[19]。实验利用薄膜压力传感器IMS-C10A和测力计NK-100N分别测量掌、指手法力度。首先,测量指法力度,调整手爪的位置,使手掌底面紧贴于施力物体表面,以每秒1次的频率工作,采集20 s内手掌内部传感器的有效力值。然后,应用测力计按照相同的方法测量1次指振的输出力大小,记录20 s内测力计数值,取平均值,对平均值进行曲线拟合,并且与理论输出值比较。掌法力度测试实验中,对20 s内每次正压下的掌力取平均值,以每秒1次的频率工作,对20个值进行参数拟合,得到手掌力-气压曲线,并与理论输出值比较。在确保机器输出符合理论预期后,研究成员体验了按摩机器人的按摩,其力度与手法接近真人按摩师,但在按摩部位的触感上与真人按摩师有一定差异。
6 总结与展望
日本、韩国等国家非常重视按摩医疗机器人的研发,但大部分研究还没有形成真正的技术产品。国内按摩医疗机器人的技术研究主要停留在产品设计、原理技术仿真和自动样机试制阶段,在按摩医疗机器人自动控制方法、仿人按摩机器人手臂技术方面,还没有相对成熟的成果。总体而言,我国按摩医疗机器人技术研究目前处于技术起步阶段,落后于世界先进水平。将人工智能技术、现代机器人按摩技术与我国传统中医经络、腧穴等按摩理论相结合,已成为我国按摩医疗机器人研究发展的主要方向。本研究设计的仿生柔性按摩机器人具有一定的开创性,兼具按摩、拔罐、艾灸多项功能及智能控制的优势,期望通过医工结合科学研究,为我国智能按摩机器人在医疗保健领域的广泛应用助力,造福广大CMP患者,促进中医现代化发展。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
基层中医药(2022年4期)2022-07-22
石油沥青(2021年5期)2021-12-02
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
文化创新比较研究(2020年7期)2021-01-13
饮食保健(2019年10期)2019-05-28
基层中医药(2018年7期)2018-12-06
能源(2016年2期)2016-12-01