基于灰色模糊理论的核心专利识别方法研究
2022-02-25 07:31温迎强杨伯军苏明岳杨雯丹
科技管理研究 2022年2期
温迎强,杨伯军,万 鹏,苏明岳,杨雯丹
(1.河北工业大学机械工程学院;2.国家技术创新方法与实施工具工程技术研究中心;3.河北工业大学建筑与艺术设计学院,天津 300130)
1 核心专利研究综述
专利是创新的源泉,包含了丰富的技术、市场、法律信息,是获取战略信息的重要来源。核心专利由于代表了具体技术领域的核心技术且数量极少,对企业的战略决策具有重要的指引作用,其识别与判定对技术成熟度预测结果的可信度、专利规避设计的成功性都具有重要意义。核心专利是在某一技术领域中处于关键地位,对技术发展具有突出贡献、对其他专利或技术具有重大影响且具有重要经济价值的专利[1]。然而,由于指标的选定及权重的判定存在较强的主观性,从海量专利中准确地识别核心专利存在一定的难度,这往往造成创新方法(TRIZ)中技术成熟度预测的专利指标缺乏足够支撑。基于专家智慧的核心专利识别方法准确率较高,但随着专利数据的大幅增长,该方法的局限性逐渐凸显,且存在较强的主观性。为此,基于专利信息指标的核心专利识别方法得到了广泛的关注。目前基于专利信息指标的核心专利识别方法主要包括单一指标识别法、组合指标识别法以及指标体系识别法。
国外研究者主要从单一指标包括专利引文同族专利大小、权利要求的数量、专利被引等3个指标来识别核心专利。如,Harhoff等[2]指出开拓性专利引用及被引用次数远高于普通专利,并认为专利被引次数越多,所涉及的发明是核心技术的可能性越大;Schettino等[3]认为专利引用、被引次数、同族专利数量可用于衡量专利的重要性,后被众多学者用于识别核心专利;Potterie等[4]以欧洲专利局的同族专利数据为例,同族专利数越大,其成为核心专利的可能性就越大;Miyazawa等[5]指出专利质量与权利要求数量呈现正相关的关系,并且从属权利要求数量越多,越可从不同的角度规避竞争对手;Florlan等[6]等指出重要专利的权利要求数量比普通专利的权利要求数量多,可以此识别核心专利。专利被引用更适用于具有较长时间的某技术领域的核心专利识别,而权利要求数量和专利族数量则不必考虑时间,且权利要求识别更适用于较新的技术领域。这些单一指标识别方法操作性较强,适用于快速识别,但所得出的结果存在差异性大、片面性强等方面的不足,准确性有待进一步提高。
为提高单一指标识别法的准确性,有学者提出将以上几种单一指标组合的组合指标核心专利识别法,在一定程度上提高了核心专利识别的准确性。如,Hamiderza等[7]将权利要求数量和专利被引用量结合来识别核心专利;孙涛涛等[8]将专利引证法与同族专利法结合识别乙肝防治领域的核心专利;袁润等[9]将专利引文数、专利族大小、权利要求数量、专利诉讼指标结合,并利用专利地图及文本聚类等手段识别风能技术领域的核心专利。
随着研究的深入,有学者指出指标体系更能有效地识别核心专利。如,滕飞等[10]借鉴Patent Sight数据库的综合竞争力指数计算方法,从技术、市场的角度,运用技术生命周期、被引频次、分类号数量等指标实现核心专利的识别;张娴等[11]、霍翠婷[12]等分别从技术、市场、法律、经济、企业、环境的角度筛选指标并构建指标体系,运用层次分析法及专家决策法识别核心专利;罗天雨[13]将文献计量、专家评分等方法结合,选定多个指标构建指标体系,运用层次分析法识别核心专利;袁润等[14]在前人研究的基础上选定8个指标并构建核心专利指标体系,运用粗糙集理论确定各指标权重,并按照核心专利综合指数(CICP)的大小进行排序,以确定核心专利;谢萍等[15]从技术领域和时域的角度,运用TOPSIS方法确定指标权重并进行排序,以识别核心专利;杨武等[16]为更加全面地识别核心专利,通过筛选指标并构建指标体系,运用最优组合赋权法确定权重并对计算结果进行排序,实现核心专利的识别;杨大飞等[17]从技术创新力、技术控制力、技术发展力的角度对指标的选择进行优化,同样运用最优组合赋权法实现核心专利的识别;李治东等[18]根据专利从申请、授权到无效的过程中指标的查全率、准确性及可操作性对指标进行筛选,运用熵权分析法实现核心专利的识别;王日芬等[19]从专利的行为效果和动机目的角度构建核心专利指标体系,并结合熵权分析法与关联分析法实现核心专利的识别。
综上所述,目前的核心专利识别方法,尤其是基于指标体系的核心专利识别方法,从多个角度对核心专利进行了识别,取得了较好的效果,但有关指标体系中指标的选定及权重的判定都存在一定的人为主观性,使得其在识别核心专利的全面性和准确性方面尚有不足。为进一步完善核心专利的识别方法,减少单一赋权存在的不足,本研究首先通过技术应用区域、主要IPC、主要研究机构及3D专利地图等4个维度的分析,了解相应技术的发展状态;其次,通过布拉德福定律确定核心专利的数量,并从专利技术、法律、市场特征的角度构建专利指标体系,运用层次分析法确定各指标的初步权重,结合灰色模糊评价法进行评分排序,确定初始核心专利集,在此基础上构建标准集序列,运用灰色关联分析法对初始核心专利集进一步筛选,确定核心专利集;最后,以管道缺陷检测机器人技术为实例开展实证研究,为企业的发展和创新决策提供参考依据。
2 数据来源及检索策略
2.1 数据来源
本研究采用智慧芽专利检索软件,对某一技术领域下的核心专利进行分析。智慧芽数据库涵盖了欧洲、美国、中国、日本、韩国等国家和地区的专利全文及摘要数据,专利数超过1.6亿件,且实时更新最新专利,为本研究数据检索的全面、准确、可靠提供了保障。
2.2 检索策略
专利检索是在精确、严格的条件下对专利信息进行的专业检索工作,是获取全面、准确的专利信息,实现核心专利识别的关键。本研究将以关键词检索与IPC分类检索为主要检索手段,对专利进行检索,围绕产品的核心技术或关注技术广泛检索相关专利。具体检索步骤如下:
(1)确定技术主题,明确要分析的技术。
(2)结合词频分析、比较分析确定相关技术的技术关键词及其在该技术领域内对应的英文词,并确定技术关键词对应的IPC分类号。
(3)确定检索时间,并以Ti(标题)、TAC(标题/权利要求)和IPC构建检索表达式。
(4)阅读标题、摘要,将同族合并,并将失效、过期、不符合主题的专利剔除。
3 研究方法
本研究运用了灰色模糊理论、灰色关联分析、布拉德福定律、3D专利地图及其他专利分析手段,提出一套核心专利识别方法,构建基于灰色模糊理论的核心专利识别模型。研究框架思路如图1所示。首先,通过3D专利地图及其他专利分析手段了解技术发展状态;其次,根据布拉德福定律确定核心专利数量,运用层次分析法和灰色模糊理论经过一次筛选确定初始核心专利集;最后,运用灰色关联分析经过两次筛选确定核心专利集,有效地提高识别结果的准确性及代表性。
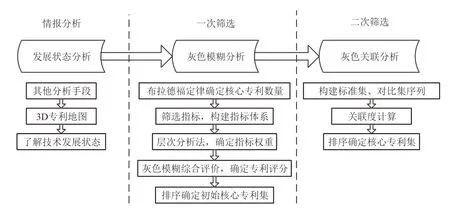
图1 研究框架思路
3.1 技术发展状态分析
技术发展状态分析如图2所示。首先,进行技术应用领域分析,将检索得到的专利按照国家或地区进行统计分析,可以帮助企业了解技术在不同国家或地区研发与应用的活跃程度,以明确技术在各国或各地区的分布状态,预测未来的技术发展态势。其次,对主要国家或地区的专利申请量进行时间序列分析,确定技术在不同国家或地区的发展情况。在此基础上,进行主要研究机构分析,确定主要国家的主要创新机构,帮助企业更深层次地了解不同研发机构的技术输出活跃度,以了解技术的市场信息。以上分析可帮助企业确定技术分布。
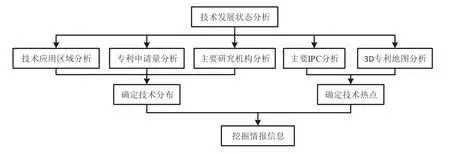
图2 专利技术发展状态分析
进一步地,对主要IPC的专利申请趋势进行分析,用于分析技术的大致研究热点。为了更加清晰地了解技术的具体研究热点,通过智慧芽3D专利地图可迅速了解到热点技术的分布情况。其中,波峰代表技术发展的热点区域,峰值越高表明该技术越热门;相反,波谷则代表技术发展的空白区域,是需要加大研发力度的区域。除此之外,3D地图也显示不同区域的高价值专利、诉讼及转让情况,便于核心专利的分析与识别。通过对以上专利的统计分析,可以清晰地了解我国相应技术的发展状况,为核心专利的识别奠定基础。
3.2 初始核心专利集的筛选
3.2.1 确定初始核心专利集及专利数量
布拉德福定律是一种用于描述文献分散规律的离散定律,是对文献数量分布规律的一种总结,可用于确定核心专利的数量[20]。该定律认为文献是按照某一规律的模型分散的,并且可将文献根据数量划分为一个核心区或相继的几个区域,每个区域刊载的专利数量相等,且核心专利与其余专利数量呈现1∶n∶n2∶……的关系。
(1)确定埃格的布拉德福系数。Brockes[21]提出布拉德福系数n可用于文献数量的判定,计算公式如下:

式(1)中:n为布拉德福系数;E为欧拉系数,E=0.577 2;t为分区数;Y为文献数量。
(2)确定初始核心专利集的数量。将专利划分为3个区域,分别为高水平区、中等水平区、低水平区域。高水平区域对应的就是核心专利,根据其呈现的1∶n∶n2∶……数量比关系可以确定核心专利的数量。为了保证核心专利筛选的更加充分以避免遗漏,将初始核心专利集与筛选后的核心专利集数量比定义为2∶1。
3.2.2 确定专利评价指标及初步权重
3.2.2.1 评价指标的确定
在评价指标的选择上,遵循科学性、系统性、相关性的原则,考虑指标的查全率、可操作性以及准确性,从技术特征、市场特征、法律特征对核心专利进行评价,给出了核心专利相关指标及其描述,如表1所示。二级指标专利类型、IPC分类号数量及跨度、专利被引用量、同族专利数量、专利申请人类型及共同申请人数量、许可转让、维持年限、三方专利情况、权利要求数量、专利效力、专利覆盖国家的数量可操作性较强、查全率较高,专利诉讼、三方专利情况、专利覆盖国家数量、专利被引用量、同族专利数量准确性较高,并且以上大部分可量化指标均与专利价值呈现正相关关系,即对应指标越大,成为核心专利的可能性就越大。
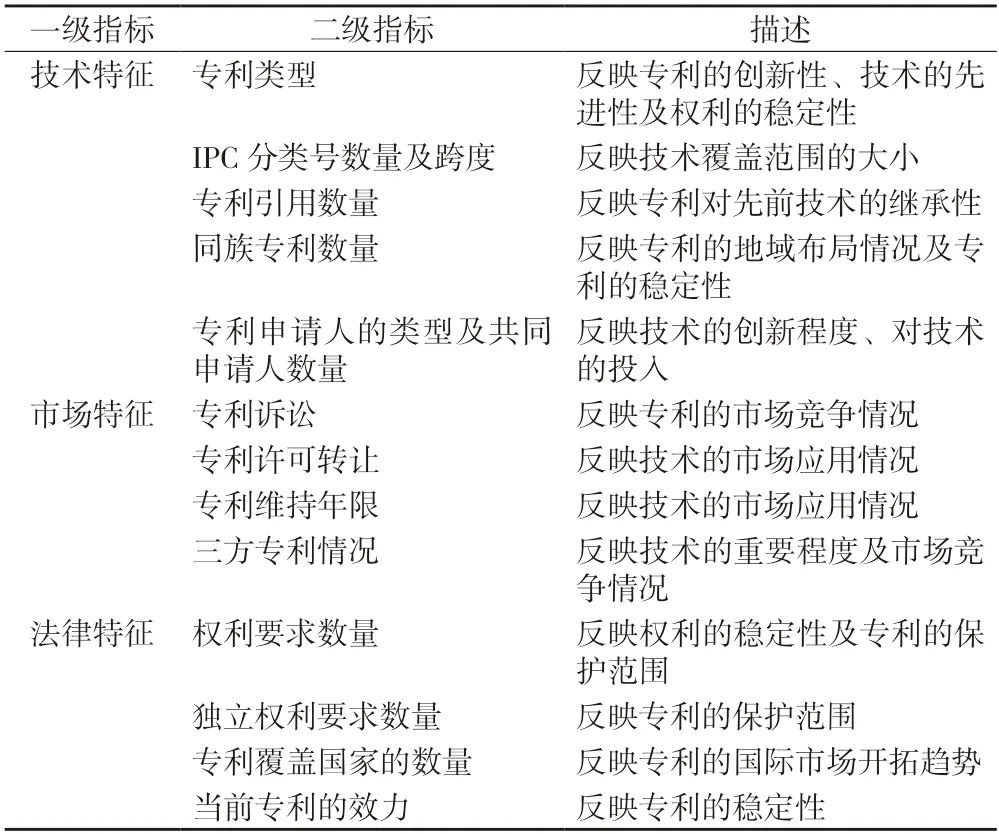
表1 核心专利相关指标描述
3.2.2.2 层次分析法确定指标权重
(1)构建层次结构模型及判断矩阵。根据层次分析法对目标、准则、对象的定义,以核心专利为目标,技术、市场、法律特征为准则,以表1中列出的13个二级指标为对象构造层次结构模型,并利用矩阵元素标度法通过两两比较的方式构造判断矩阵。矩阵元素标度法如表2所示。
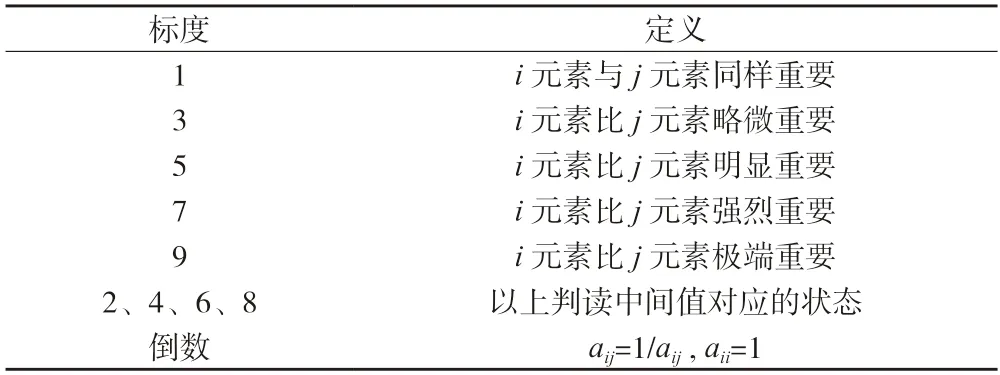
表2 矩阵元素的标度方法
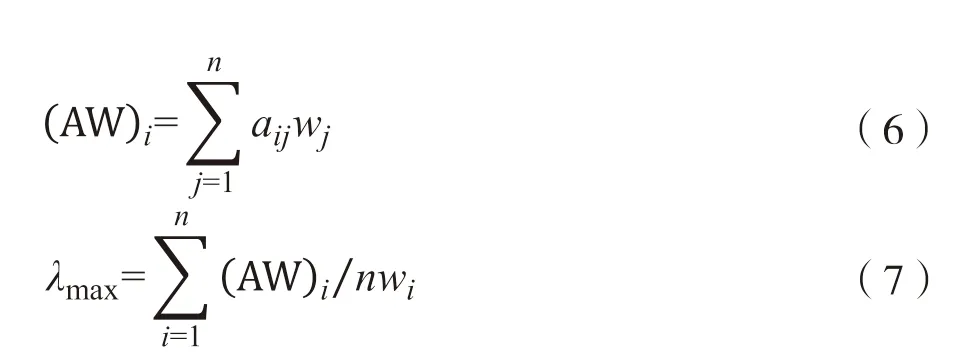
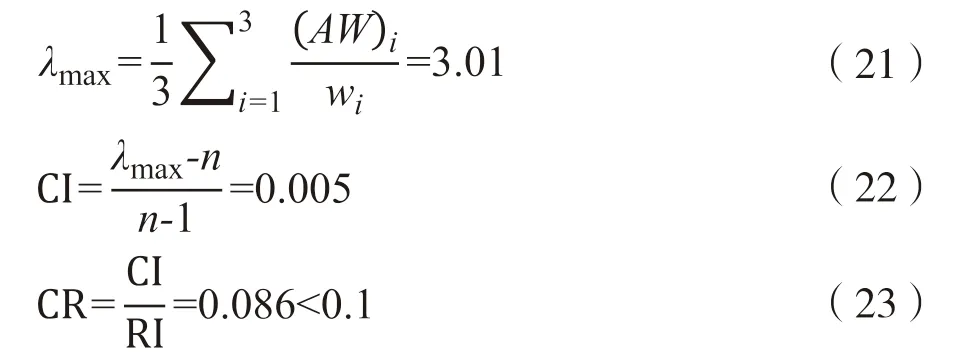
(2)一致性检验。一致性检验可以避免各元素进行两两比较时前后不一致的情况。首先将判断矩阵按列、行进行归一化处理,如公式(3)~(5)所示,获取初步权重向量。

其次,计算最大特征根并进行一致性检验,以判断各指标之间的协调一致,避免相互矛盾的出现。定义CI为一致性指标、CR为一致性比例,并引进平均随机一致性指标,如表3所示。若CR0.1,说明矩阵A的不一致程度在所要求的范围内,则判断能够被接受;W为对象层各指标相对于目标层的权重。

表3 平均随机一致性指标
3.2.3 灰色模糊综合评价
将层次分析法与灰色模糊结合,综合多位专家的意见,避免单独的主观判断同时减少信息的缺失,使得评价结果更加的真实可靠[22]。
3.2.3.1 确定指标集、评语集及分值集
评价指标集为影响评判结果的各个元素组成的集合,即为上述层次分析的方案层的各影响元素,可表示为;评语集为专家根据经验对各个指标作出的评判结果所组成的集合,通常表示为,其中分别表示高水平专利、较高水平专利、一般水平专利、低水平专利和较低水平专利;分值集为不同评语集下对应的分值取值范围,可表示为,得分范围10~8分、8~6分、6~4分、4~2分、2~0分分别代表高、较高、一般、低、较低水平专利。
3.2.3.2 确定隶属度矩阵
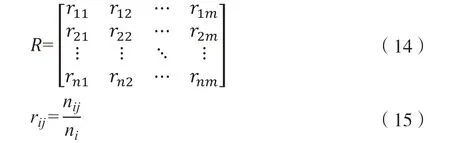
通过各专家对评价指标集中的各指标打分,计算每一位专家对同一评价指标在不同的白化权函数下落入不同评价等级的权重,确定隶属度矩阵R。
(1)构建决策矩阵E:
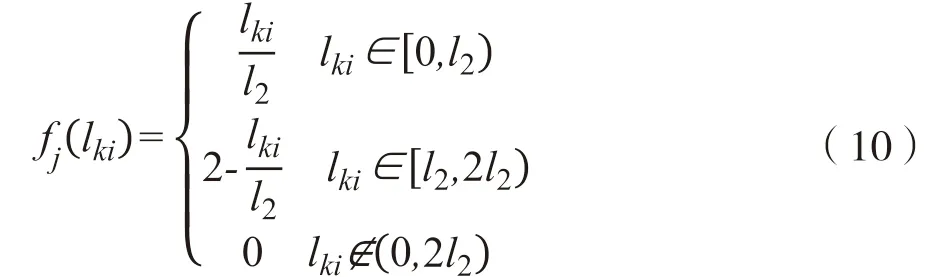
(2)确定白化权函数。白化权函数是用来描述一个灰类或灰数对其取值范围内不同数值的偏爱程度,是用定量描述的方法刻画评估对象隶属于某个灰类的程度[23]。白化权函数可以有效地确定评分ski属于第j个评语集的权重。最常见的白化权函数有4种形式,包括典型白化函数、上测度白化函数、中测度白化函数、下测度白化函数。典型白化函数为先增、中间不增不减、后减的连续函数。若白化权函数无第3、4个转折点,则称为上测度白化函数;若白化权函数无第2、3个转折点,则称为中测度白化函数;若白化权函数无第1、2个转折点,则称为下测度白化函数。具体函数形式如下:
1)上测度白化权函数:
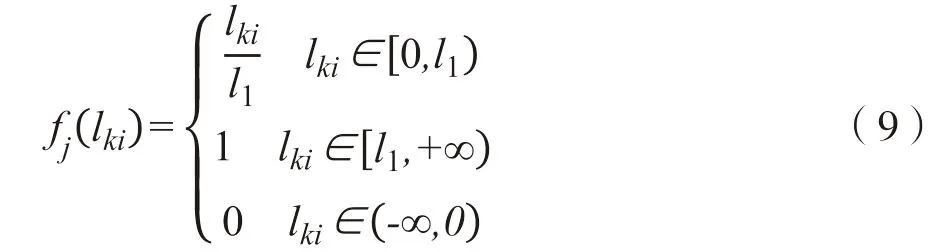
2)中测度白化权函数:
3)下测度白化权函数:
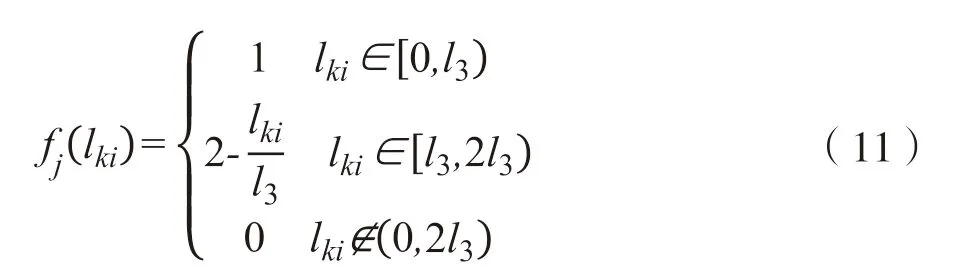
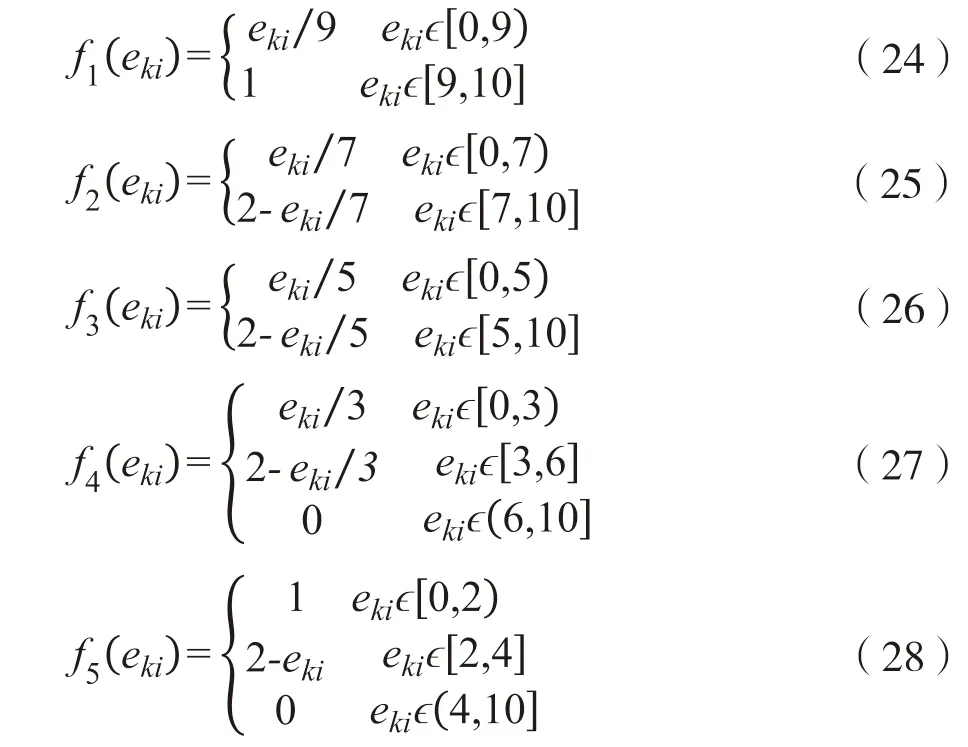
本研究中存在5个灰类,需要构造5个白化权函数。
(3)确定不同指标在不同白化权函数分析下的权值及总权值。公式分别如下:

式(12)(13)中:m为灰类的个数;为第i个指标在第j个白化权函数下的权值;为第i个指标在所设置的白化权函数下的总权值。
(4)确定隶属度矩阵。设m为灰类个数,则第i个评价指标落入第j评价等级的灰色评价权重组成隶属度矩阵R:
3.2.4 确定初始核心专利集
在确定初始权重向量以及隶属度矩阵的基础上,可以获得专利对不同评分要求的隶属度向量B,以及最终的综合评分S。公式分别如下:

式(16)(17)中:P为初始权重向量;B为专利对不同评分标准的隶属度向量;Q为对应的分值集。
首先确定影响核心专利判定的各指标组成的权重向量P,初步量化核心专利;其次,通过多位技术领域专家的灰色模糊评价确定多位专家对专利隶属不同指标的权重构成的隶属度矩阵R,进一步量化核心专利;最后,通过得分的形式量化专利,确定初始核心专利集。
3.3 核心专利集的确定
3.3.1 确定核心专利集的专利数量
为了提高识别结果的代表性、准确性及实用性,初始核心专利集需要进一步缩小范围。根据式(1)以及高水平区和其他区域的数量关系,可以确定核心专利集的专利数量。
3.3.2 灰色关联分析
灰色关联分析是对影响系统的各因素进行关联分析的一种方法[24]。在确定初始核心专利集后,统计指标体系中各指标分析下的最大值,以此构成的序列作为标准集序列,并以各指标分析下获取的相应数据构成的序列为对比集序列,通过对标准集序列和对比集序列进行关联分析,确定核心专利集。对比集序列和标准集序列之间的关联度值越大,则对比集越接近标准集序列。具体分析过程如下:
理论上,当分辨率为0.5,关联度达到0.6,即满足要求。
3.3.3 确定核心专利集
对以上获取的关联度进行排序,筛选核心专利。一般可以达到的筛选规模为确定的核心专利数量的2~3倍,保留的核心专利集的专利数量为初始核心专利集的专利数量的90%。
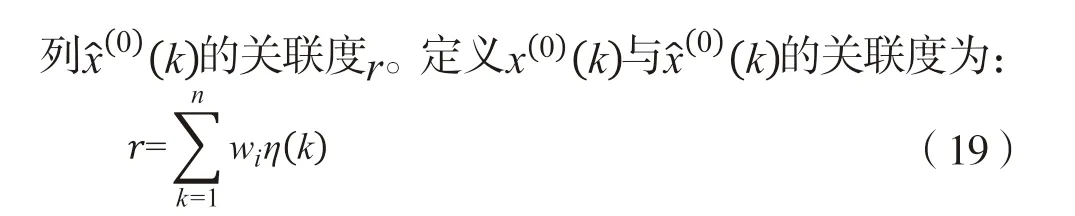
4 基于灰色模糊的核心专利识别流程
结合上述专利检索及评价指标的确定方法、初始核心专利集、核心专利集的各阶段确定方法,形成基于灰色模糊理论的核心专利识别流程,如图3所示。首先,确定技术主题,制定检索策略,对专利进行检索,进行技术应用区域分析、主要IPC分析、主要研究机构分析及3D专利地图分析,了解相应技术的发展状态,并结合布拉德福定律确定初始核心专利集的专利数量。其次,通过层次分析法确定指标初步权重,采用灰色模糊评价法确定隶属度矩阵,计算综合评分、排序,确定初始核心专利集。最后,运用灰色关联分析法计算关联度、排序筛选初始核心专利集,以确定核心专利集。
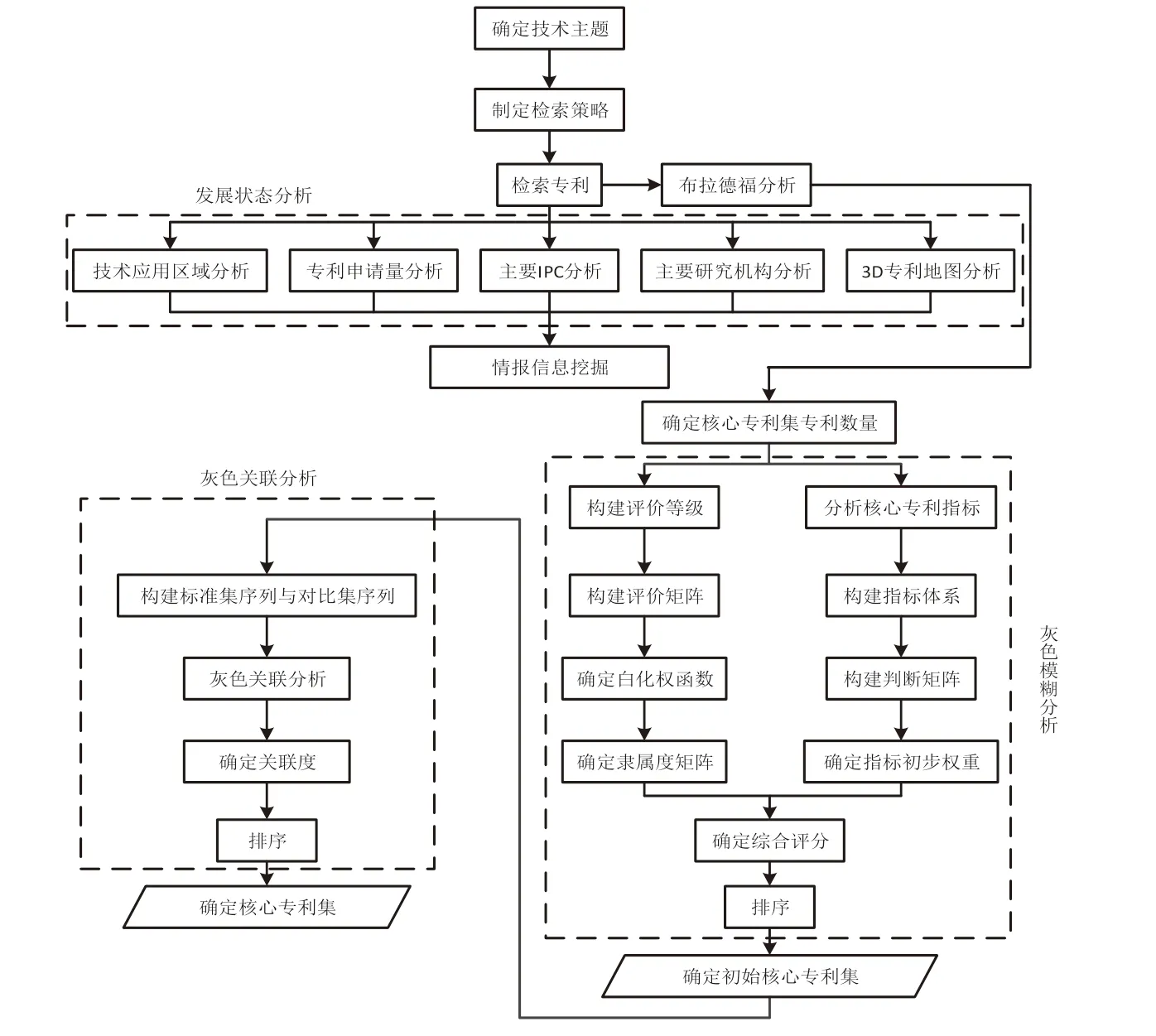
图3 基于灰色模糊分析的核心专利识别流程
5 实例验证
管道输送流体材料时,化学腐蚀、管材缺陷及流体冲刷等因素严重影响了管道的输送能力,为此,管道缺陷检测机器人应运而生。管道缺陷检测机器人技术是一种沿管道内外行走,携带一种或多种传感器或操控设备,在操作人员或计算机的控制下实现管道操控的机、电、仪一体化系统[25]。目前,对该类机器人的研发已相继在世界各国开展起来。现以识别该技术的核心专利为例,验证本研究以上所提出方法的科学性和有效性,同时也为我国开展对管道缺陷检测机器人的研发提供情报信息。
(1)以关键字、IPC分类对管道缺陷检测机器人技术专利进行检索,检索方式如下:TAC_ALL:(机器人) AND TAC_ALL:(探测 OR 检测 OR 识别OR 检查 OR 扫描) AND TAC_ALL:(管道 OR 管路)AND IPC(F16L55),共检索到1 098条有效专利。
(2)技术发展状态分析。对检索得到的结果按照国家的专利申请量进行统计,可得管道缺陷检测机器人技术应用的主要区域分布,如表4所示,可知该技术在中国、美国、韩国3个国家研究与运用相对活跃,说明这项技术在这3个国家相对受重视;此外,在德国、日本、欧洲专利局和世界知识产权组织的专利申请量分别为24、19、17和15件。
表4 1990—2021年管道缺陷检测机器人技术应用的主要区域分布
图4显示了中国、美国等排名前5位的国家1990—2021年的管道缺陷检测机器人技术相关专利申请趋势。由图4可知,该技术最早于1990年在美国出现,在2001年之前,相关研究与应用主要以韩国、美国、日本、德国为主,一直到2012年,各国的专利申请量相对保持平稳;2012年后,中国在该技术领域的专利申请量远远高于其他国家,2019年高达222件,其他国家的专利申请量保持相对稳定,说明其他国家的该技术已处于相对成熟阶段。
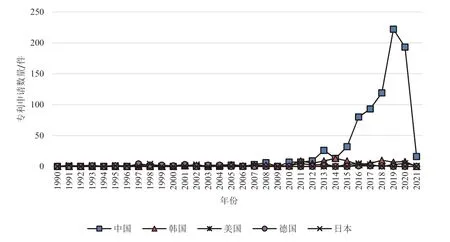
图4 五国管道缺陷检测机器人技术应用专利申请趋势
进一步地,对管道缺陷检测机器人技术的主要研究机构进行分析,以反映技术研发、市场状况。如图5所示,发现江苏若博机器人科技有限公司、深圳市博铭维智能科技有限公司、湘潭弘远电子科技有限公司、西南石油大学、武汉中仪物联技术股份有限公司申请的专利分别为20、17、14、14、12件,且在排名前15位的研究机构中,中国有高达12家,日本、韩国分别有2家、1家,前者申请数量超过后者的5倍,说明中国创新机构对该技术的输出非常活跃。
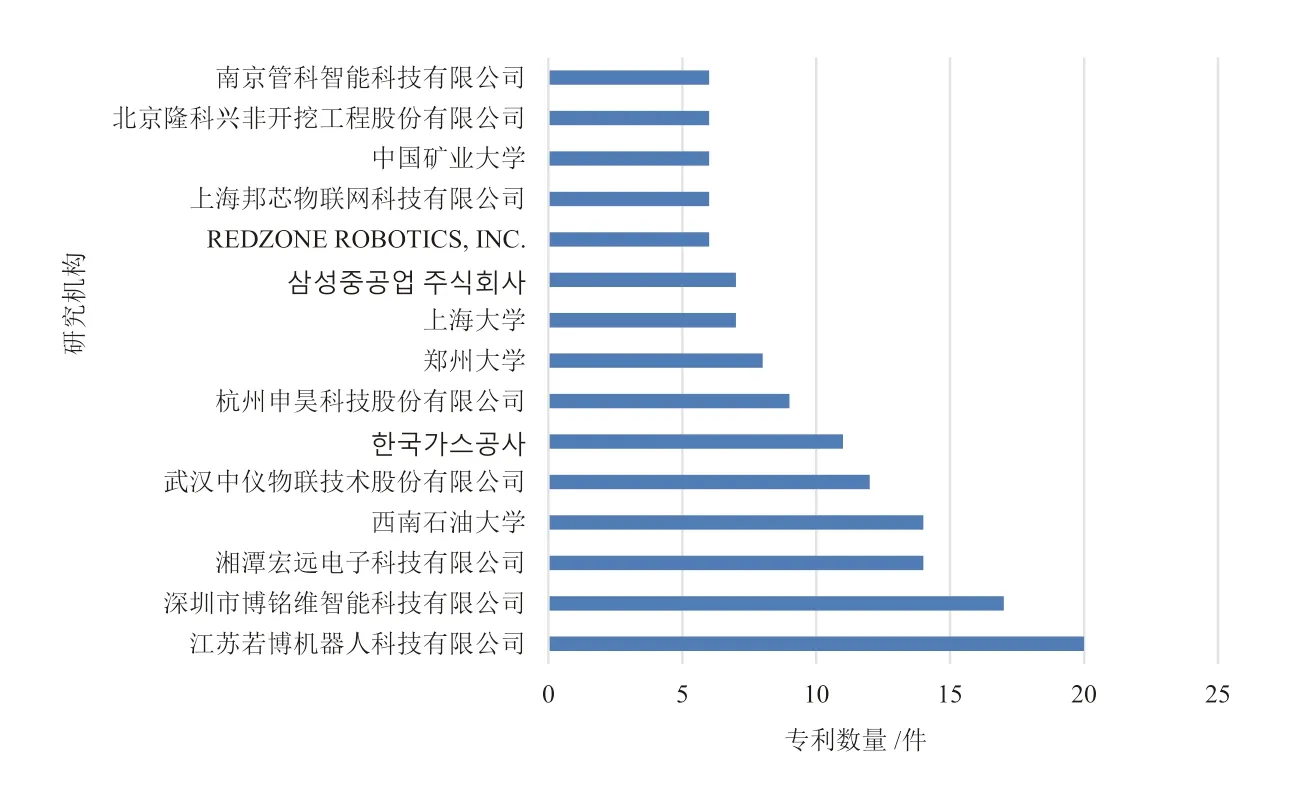
图5 1990—2021年全球管道缺陷检测机器人技术主要研究机构
在此基础上,对检索到的专利进行IPC分析,可以大致了解技术研究的热点。图6显示了管道缺陷检测机器人技术专利10个主要IPC分类的历年专利申请量趋势,可知F16L55/26、F16L101/12、B25J5/00、F16L55/18、F16L101/10、B16L55/30、F16L55/28总体上专利申请量变化趋势较缓,2015年前专利申请量变化相对平稳,2015年后变化趋势稍有提升;F16L101/30、F16L55/32、F16L55/40在2015年前与其他主要IPC分类相似,变化相对平稳,在2015年后申请量迅猛增长,其中F16L101/30于2019年申请量高达190件,F16L55/32、B25J11/00则分别为136件,F16L55/40于2020年申请量高达119件。说明目前研究和应用的重点在F16L101/30(探测、测量或测试)、F16L55/32(管子或导管内可移动的、自身包含推进的结构方面的装置)、F16L55/40(管子或导管内可移动的本体的结构方面的装置)上。
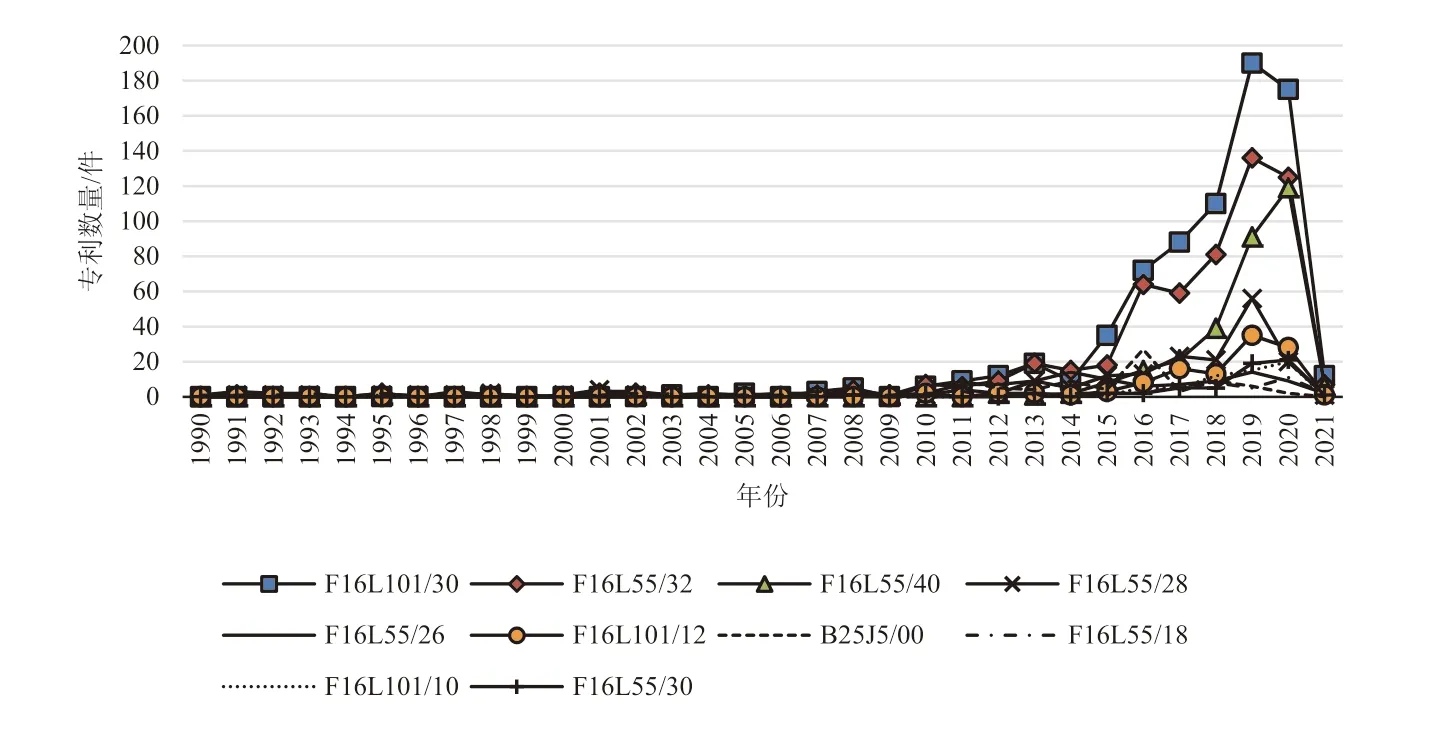
图6 全球管道缺陷检测机器人技术主要IPC的专利申请趋势
为了进一步了解管道缺陷检测机器人技术的具体研究热点,可通过3D专利地图分析迅速确定管道缺陷检测机器人热点技术的分布情况。如图7所示,从整体来看,清洁机器人、蠕动、适应不同、液压缸、主管、支管、照明灯、镜头、摄像装置、视频检测、无线传输、通信连接、螺旋驱动、调节机构、转向装置等处于波峰位置,表明相关技术是目前研究的热点;与此同时,检查装置、非破坏性、流体管道、小口径、滑油等处于波谷位置,表明相关技术研究相对薄弱。同时可见,清洁机器人、蠕动、适应不同、爬行、液压缸、螺旋驱动、调节机构、转向装置等处所集中的点数较密集,得知在该技术的申请人较为密集。
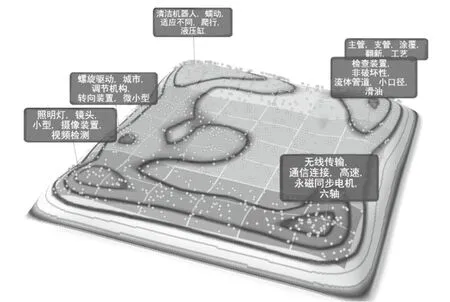
图7 1990—2021年全球管道缺陷检测机器人技术的热点分布
智慧芽数据库中由低到高设置“$”、“$$”、“$$$”、“$$$$”、“$$$$$”对专利价值进行评级,通过统计分析可知,照明灯、镜头、视频检测处共有192件专利,其中174件为中国专利,中国专利中包括133件处于$级、5件处于检索最高$$$级,主要集中在气体检测、视觉检测、检测系统、控制方法、智能机体、光学检查等方面的研究;螺旋驱动、调节机构、转向装置处共有352件专利,其中314件为中国专利,中国专利中包括241件处于$级、7件处于检索最高$$$级,主要集中在移动机器人、智能管道、螺旋驱动、测量管道、控制机构等方面的研究;清洁机器人、爬行装置处共有223件专利,其中185件为中国专利,中国专利中包括145件处于$级、3件处于检索最高$$$级,主要集中在履带式、爬行式机器人、移动机器人、磁吸附、自适应支撑模块、万向节等方面的研究;检查装置、流体管道、滑油处共有136件专利,其中有65件为中国专利,中国专利中包括57件处于$级、1件处于检索最高$$$级,主要集中在驱动单元、流量控制阀、传感器、螺旋桨、测量机构、电缆等方面的研究;无线传输、通信连接处共有101件专利,其中69件为中国专利,中国专利中包括58件处于$级、1件处于检索最高$$$级,主要集中在图像处理、校准数据、定位系统、监控系统、电机驱动器等方面的研究;主管、支管、涂覆、工艺处共有91件专利,其中有19件为中国专利,中国专利中全部处于$级,主要集中在机器人系统、电路板、地下管道等方面的研究。全部专利中,美国、日本、韩国的$$$$级专利分别为5、3、2件,$$$级专利分别为19、6、9件。
综上可知,全球管道缺陷检测机器人技术专利数量从2015年起得到快速增长,其中一个重要的原因是中国专利数量的快速增长促进了全球专利数量的增长;同时可以看出美国、日本、韩国研究相对较早,美国申请量虽少但高价值专利居多。中国虽然具有较高的专利申请量,但高价值专利却不敌其数量优势,因此确定核心专利对于中国在该技术领域的研发与改进至关重要。
(3)确定初始核心专利集。首先,确定核心专利集的专利数量。根据布拉德福定律,可知布拉德福系数n为:

式(20)中:Y=1 098,E=0.577 2,t=3。根据高水平区、中等水平区、低水平区存在的数量关系,可知初始核心专利集专利数量为14条、核心专利集专利数量为7条。
在此基础上,按照表1构建层次结构图,并对各指标Bi构建判断矩阵A,如表5所示。

表5 管道缺陷检测机器人技术的判断矩阵
将矩阵A按行列进行归一化处理,可得一级指标的权重向量为,在此基础上进行一致性检验。公式分别如下:
同理,分别对技术特征B1、市场特征B2、法律特征B3按照指标A的权重向量求解过程分别构建判断矩阵,进行归一化处理,并进行一致性检验,可知二级指标B1的权重向量为:,二级指标B2的权重向量为:,二级指标B3的权重向量为:。因此,二级指标B1中专利类型占比为46.6%,IPC分类号数量及跨度占比为10.3%,专利被引用占比为24.7%,同族专利数量占比为13.8%,专利申请人的类型及共同申请人数量占比为4.6%;二级指标B2中专利诉讼占比为15.3%,专利许可转让占比为24.4%,专利维持年限占比为7.2%,三方专利情况占比为53.1%;二级指标B3中,权利要求数量占比为7%,独立权利要求数量占比为56.1%,专利覆盖国家的数量占比为13%,专利当前效力占比为23.9%。获得二级各指标的组合权重(初始权重),如表6所示。
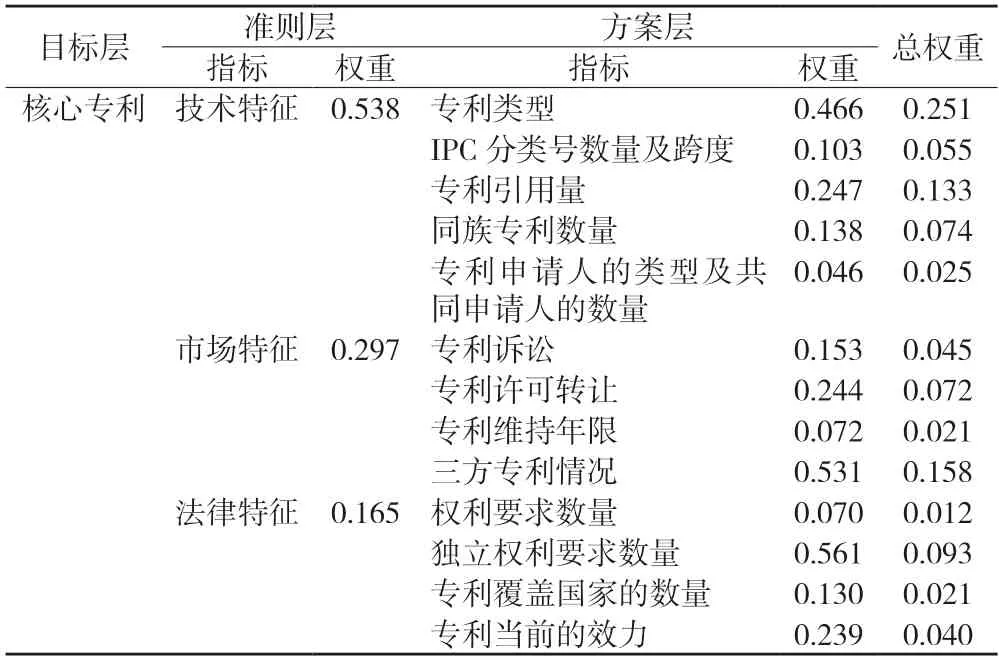
表6 管道缺陷检测机器人技术各指标项组合权重
在确定各指标初始权重的基础上,综合各个专家的意见对各指标进行模糊综合评价,以专利CN101832447B为例确定隶属度矩阵。将专利的评分标准划分为高、较高、一般、较低和低共5个级别,对应得分取值范围分别为8~10分、6~8分、4~6分、2~4分、0~2分;在此基础上,选取6位专家对上述层次分析中的各指标进行打分,构建评语矩阵,如表7所示。

表7 管道缺陷检测机器人技术的评价矩阵
在此基础上,根据确定的灰类构造5个白化权函数:
由此,计算灰色统计值和灰色权值。以指标c1为例,对各位专家在各灰类下的隶属度按照灰类进行合并:
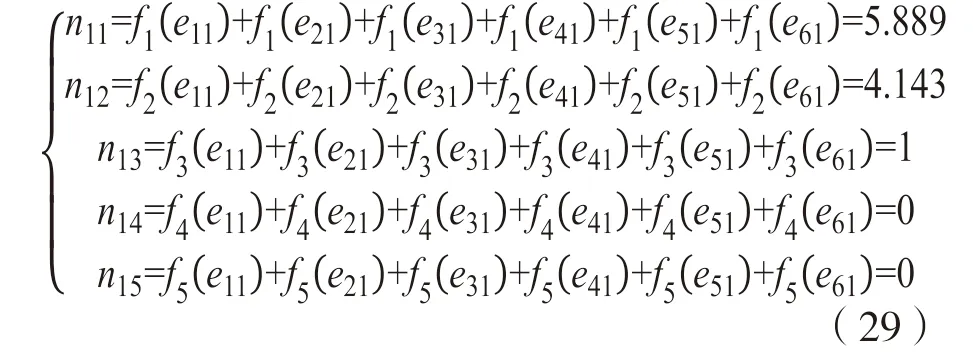
由此,可知指标c1的总体灰色统计量为:

进一步可以判断指标c1属于各个灰类权重为:

同理,可以计算求得其他指标属于各个灰类的权值,确定隶属度矩阵R:
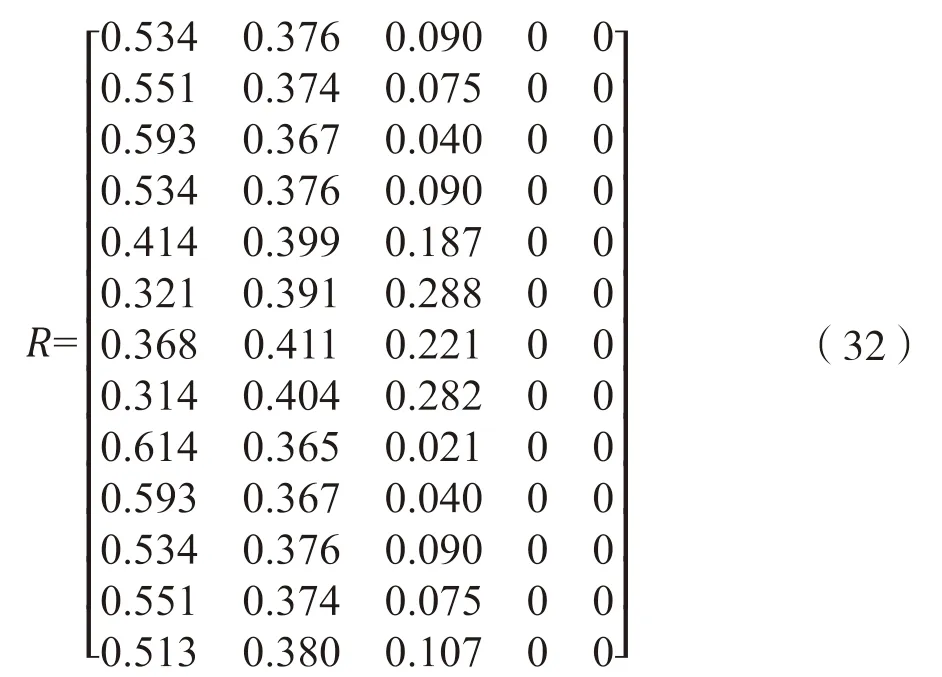
运用层次分析法获得的初步权重与隶属度矩阵,可求得核心专利对不同评分标准的隶属度,并计算核心专利的得分:

该专利的综合评分为7.86分,为较高水平的专利。
在此基础上,确定各专利的综合评分,初始核心专利集的综合评分按照排序的方式进行显示,如表8所示。

表8 管道缺陷检测机器人技术的初始核心专利集
(4)确定核心专利集。对检索得到的所有专利的各项指标进行统计分析,以构建核心专利标准集序列及对比集序列。为了更好地量化各个指标以进行接下来的关联分析,作处理如下:对于专利类型指标,若为外观设计,则记“1”;若为实用新型,则记“3”;若为授权发明,则记“5”。对于三方专利指标,若为在美国、日本、欧洲都提出的专利申请,则记为“1”;否则记为“0”。对于许可转让指标,若专利存在普通许可、从属许可或转让则记为“1”;若专利存在独占许可或排他许可则记为“3”;否则,记为“0”。对于专利当前的效力指标,若专利仍在有效期内,则记为“1”;否则记为“0”。其余指标则根据检索分析下相应的数量进行计数即可。由此,可以获得标准集序列,记为:

以专利CN101832447B为例说明关联分析的过程。记对比集序列为:

由此,可知专利CN101832447B分析下的两级最大差为165,两级最小差为0。将其代入式(16),可得标准集中各指标与对比集中各指标的关联系数分别为:1、0.954、0.333、0.753、0.932、0.988、0.976、0.892、0.988、0.673、0.673、0.922、1。在此基础上,利用式(17)及之前所求的权重,可得最终关联度为0.846。同理,可以获取初始核心专利集其他专利的关联度,并在此基础上进行排序,如表9所示,最终获取核心专利集。
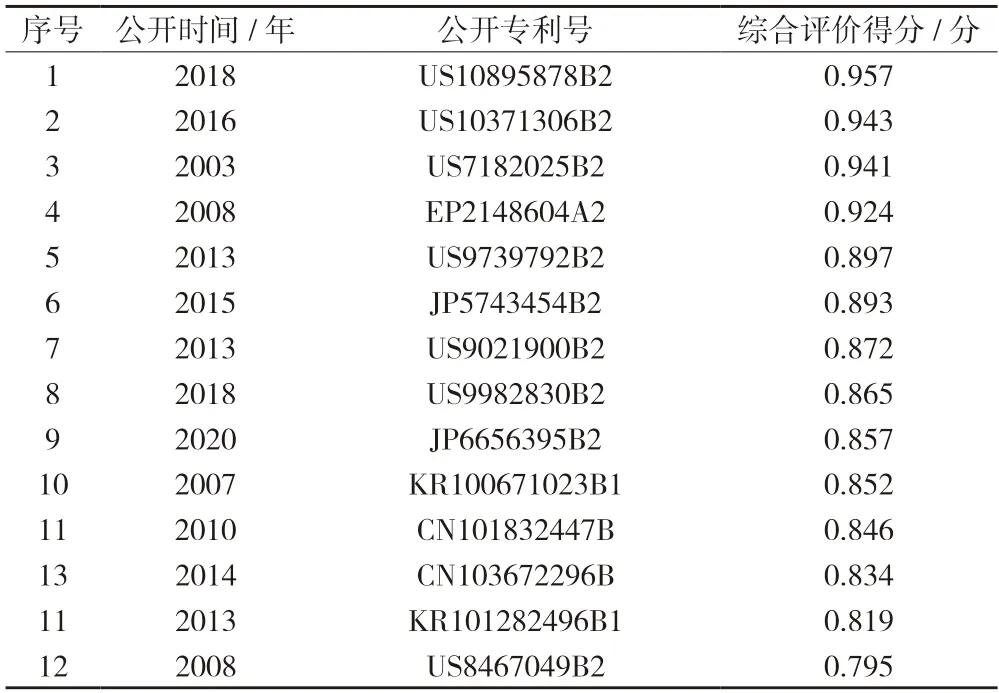
表9 管道缺陷检测机器人技术的核心专利集
根据初始核心专利集,运用灰色关联分析法,结合布拉德福定律,对计算结果进行排序,经过筛选确定7件核心专利分别为US10895878B2、US10371306B2、US7182025B2、EP2148604A2、US9739792B2、JP5743454B2、US9021900B2。
核心专利识别结果是检验本研究提出模型可靠性及有效性的一种重要手段。该方法可以有效地弥补权重判定存在主观性的不足,减少信息的遗漏,使得核心专利评估结果更加可靠。在以上实证识别的7项核心专利中,有5项是美国专利,欧洲专利及日本专利各1项。其中,US10895878B2权利要求数量为19条,专利引用量为165条,可见其对先前技术的继承性,并且该专利是三方专利,同时发生了权利转移;除此之外,该专利的同族专利数为29,平均专利引用量为40条,且被引用的49件专利中90%仍是三方专利,且发生了权力转移,并且智慧芽专利价值判定结果为$$$$级。同样的,其余专利在以上几项指标分析下的排名也均非常靠前,且部分是三方专利同时发生了权利转移。因此,运用本研究以上理论和模型方法分析得到的核心专利评估结果具有一定的科学性、合理性及准确性。
6 结论
本研究根据布拉德福定律及灰色模糊理论,提出一套技术领域核心专利识别方法。首先通过技术应用区域分析、主要IPC分析、主要研究机构分析及3D专利地图分析,了解相应技术的发展状态;然后,根据布拉德福定律确定核心专利的数量,并对指标进行筛选,运用层次分析法、灰色模糊分析法、灰色关联分析法进行评分、排序,得到初始核心专利集。该方法将主观与客观结合,充分考虑难以量化的数据以及不完全信息,获得更加合理、可靠和准确的评估结果,辅助研发人员可以快速、准确地筛选核心专利。通过对实例的分析,表明该方法具有一定的理论及实践价值。
猜你喜欢
水运工程(2022年7期)2022-07-29
野生动物学报(2021年1期)2021-01-13
热带农业科学(2020年7期)2020-08-31
环境与生活(2020年4期)2020-02-19
中国洗涤用品工业(2019年4期)2019-05-11
专利代理(2016年1期)2016-05-17
中国茶叶加工(2015年3期)2015-02-27
质量与标准化(2010年5期)2010-05-03
质量与标准化(2010年3期)2010-05-03