基于改进SIFT图像匹配的无人机高精度避障算法设计
2022-02-25 03:08:38肖英楠孙抒雨
机械制造与自动化 2022年1期
肖英楠,孙抒雨
(成都理工大学 工程技术学院,四川 乐山 614000)
0 引言
随着无人机对智能控制性和稳定性要求越来越高,结合视觉导航和人工智能控制方法,优化无人机避障能力是提高无人机位置的输出稳定性和路径空间规划能力的必经之路[1],且在无人机的路径空间规划和智能控制等领域具有重要意义。
对无人机高精度避障控制方法主要有多无人机编队分组决策与一致性分析方法[2]、时变通信延迟下的无人机编队鲁棒自适应控制[3]和无人机三维编队保持的自适应抗扰方法等[4],通过视觉参数融合和控制算法设计,实现无人机高精度避障,但上述方法对无人机避障的环境适应度水平不高,控制可靠性不好。针对上述问题,本文提出基于改进SIFT图像匹配的无人机高精度避障算法,分析无人机避障环境,提取无人机高精度避障地理空间图像的边缘轮廓特征分布集;通过SIFT图像配准处理,建立无人机高精度避障地理空间图像的边缘轮廓特征检测模型,引入对比梯度分析和参数融合识别的方法;对无人机高精度避障图像信息加权融合,优化无人机高精度避障地理空间网格匹配。本文方法在提高无人机高精度避障和自适应控制能力等方面的性能优越。
1 无人机高精度避障的视觉图像分析和融合
1.1 无人机高精度避障的视觉图像采集
为实现改进SIFT图像匹配的无人机高精度避障和自适应控制,建立无人机避障环境图像模型。

(1)
其次,将无人机避障环境图像模型分解为一个二自由度模型,结合空间视觉信息增强的方法,进行无人机高精度避障空间视觉特征检测和视觉图像RGB特征分解[7],得到无人机高精度避障空间视觉测量值为
(2)
式中:w(t)为增强视觉空间函数;dj为无人机高精度避障空间特征参数。在机器视觉跟踪识别模型下,进行无人机高精度避障空间视觉特征点融合和决策控制[8],由n个决策变量的避障控制函数,得到无人机高精度避障的状态特征融合结果为
(3)
式中:r为无人机避障控制函数;sf为在视觉导航下无人机高精度避障的视觉空间导航模糊特征参数。
最后,整合无人机高精度避障空间视觉图像低分辨与高分辨状态特征融合结果,得到无人机高精度避障的测量方程为
A(x)=K(x0,y0)+pj(e)+sf
(4)
在优化的无人机高精度避障路径下,通过视觉融合和特征辨识,得到无人机高精度避障控制的关联度为K(x0,y0),以K(x0,y0)为视觉空间导航的坐标原点,即完成了无人机避障环境图像模型的构建。
1.2 无人机高精度避障信息融合
对采集的无人机避障环境图像分布进行模糊特征匹配处理,提取无人机高精度避障地理空间图像的边缘轮廓特征分布集,通过模糊度特征匹配,实现SIFT图像参数匹配,在视觉导航下[9],无人机高精度避障的特征集合表示为
(5)
式中:τ为无人机高精度避障的障碍物分布位置信息;f为网格分块匹配区域参数。在大气散射环境下进行无人机高精度避障空间视觉图像的模糊信息融合处理,得到无人机高精度避障空间视觉传递的阵元间距d=λmin/4,采用关联维检测的方法,得到无人机高精度避障空间视觉融合的分块检测结果为
up=H+(a2+c1)+A
(6)
式中a2与c1为无人机高精度避障空间视觉导航的边界特征分布参量。采用自适应路径参数匹配,得到无人机高精度避障空间视觉分布m×n维矩阵A,采用自适应参数融合方法进行无人机高精度避障空间视觉融合[10],得到无人机高精度避障的轨迹分布为
Ω=A+up+l(b)
(7)
令A∈Cn×n(n×n维复数空间)为无人机高精度避障的模糊度检测模型,得到无人机高精度避障空间匹配网格区域为l(b),实现避障信息融合。
2 无人机高精度避障算法优化设计
2.1 无人机高精度避障的SIFT角点标注
对采集的无人机避障环境图像分布进行模糊特征匹配处理,提取无人机高精度避障地理空间图像的角点匹配成功集,通过模糊度特征匹配,实现SIFT角点标注[11]。
首先,构建无人机高精度避障地理空间分布函数,计算视觉导航下无人机高精度避障的空间规划分布矩阵为
(8)
采用空间区域重构的方法,进行无人机高精度避障的参数寻优和网格分块区域匹配,无人机高精度避障的模糊参数特征匹配结果为w(t),设自适应寻优控制的特征分量为
(9)
式中Rm为无人机高精度避障的图像分块融合模型参数。无人机高精度避障地理空间图像分块特征检测的匹配模型表示为
(10)
式中:cg为无人机高精度避障地理空间图像的分块特征函数;A(t)为无人机高精度避障地理空间图像的角点信息。
其次,结合对无人机高精度避障地理空间图像的融合解析控制方法,得到无人机高精度避障地理空间图像SIFT角点检测输出矩阵表示为
(11)
最后,根据以上角点匹配结果即角点检测输出矩阵,实现对无人机高精度避障地理空间图像的SIFT角点标注。
2.2 无人机高精度避障的路径规划
假设无人机高精度避障地理空间图像的角点T分布特征量为T1、U1、V1。根据SIFT角点标注结果进行无人机高精度避障地理空间图像的特征点提取,结合特征标记方法进行无人机高精度避障空间视觉融合,进行相邻节点检测,得到状态参数融合输出为
(12)
进行参量自适应调节,得到无人机高精度避障的参数以及地理空间分布的相位角xi、yi、zi、Ti、Ui、Vi(i=1,2,…,6)。根据避障算法,无人机高精度避障方程为
(13)
式中:s*为无人机轨迹定位误差;c为无人机避障参数融合分布集,构建无人机高精度避障地理空间位置参数分析模型[12];f(u)为无人机高精度避障地理空间融合的统计特征量。
根据上述分析,结合无人机高精度避障空间位置参数分析模型,得到显著性特征点j处的信息素强度,以此为模糊信息融合聚类最优判断参数,得到无人机高精度避障地理空间图像的边缘像素集为
B=Jc+Ω(X)+Δn
(14)
式中:Jc为无人机高精度避障地理空间图像相似度特征量;Ω(x)是邻域大小。对不同地理网格空间分布的无人机高精度避障空间视觉图像进行边缘轮廓特征检测,得到检测分布为
x(u)=B+[J(x)+I(x)]
(15)
式中:J(x)为无人机高精度避障地理空间图像的灰度信息特征值;I(x)为无人机高精度避障的融合边缘特征量。以此进行显著性检测,无人机高精度避障的像素特征点分布为
(16)
式中a表示无人机高精度避障形态分离的维度参数。无人机高精度避障的路径规划显著图分布为
(17)
式中:Δx表示无人机高精度避障路径分布的差异度融合特征量;Δy表示无人机高精度避障地理空间图像重建的灰色特征量;di表示无人机高精度避障地理空间图像重建的检测统计特征量,得到差异度信息分量为d(x)、t(x)。由此构建无人机高精度避障地理空间图像重建模型,通过对比梯度分析和参数融合识别的方法,实现对无人机高精度避障图像信息加权融合处理,采用改进SIFT图像匹配方法,实现路径规划,得到无人机高精度避障的路径规划的迭代式为
M=c0+Ua(l)+cN-1
(18)
式中:c0表示无人机高精度避障空间信息分布的拉普拉斯算子;cN-1表示模板匹配函数。
根据上述算法设计,实现无人机高精度避障空间规划和避障算法的优化设计。算法的实现流程如图1所示。
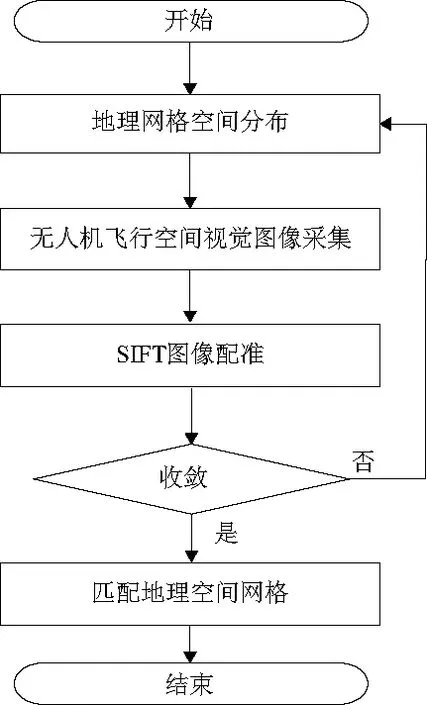
图1 无人机高精度避障算法的实现流程
3 仿真实验与结果分析
为了验证本文方法在实现无人机高精度避障和路径规划中的应用性能,进行仿真测试分析。以某精灵4pV2.0系无人机为例,其前后视的双目视觉、下视双目+超声波和左右红外避障共同构成了避障系统(系统参数来源:https://www.81uav.cn/tech/201808/27/846.html),设定其无人机路径参数分布为空间维度为24,网格分布区域为25×25,无人机高精度避障的图像灰度像素强度为15 dB,避障路径规划的搜索步长为12m。根据上述参数设定,得到无人机避障的初始路径分布如图2所示。

图2 无人机避障的初始路径分布
根据图2的路径分布,进行无人机高精度避障地理空间图像分析,对无人机避障的避障路径规划,得到避障路径分布如图3所示。
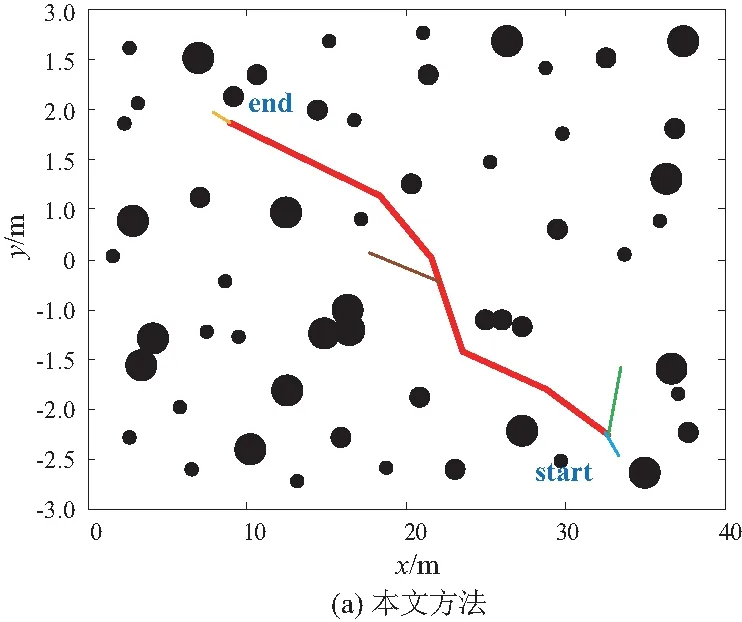

图3 无人机避障路径分布
分析图3得知,本文方法支路较少,且整体方向较为统一,说明其进行无人机避障的路径规划能力较好,这是因为本文方法在信息增强技术下,通过模糊度特征匹配,进行无人机高精度避障空间视觉信息扫描和自适应控制,实现SIFT图像参数匹配,优化避障过程。
通过对避障精度的分析,得到对比结果如表1所示。

表1 无人机避障精度测试结果
分析表1得知,本文方法进行无人机避障的精度较高,因为本文在视觉导航下,采用改进SIFT图像匹配方法,构建了无人机高精度避障空间位置参数分析模型,实现了路径规划和高精度避障设计。
4 结语
为了优化无人机高精度避障控制方法,结合视觉导航和人工智能控制方法,本文提出基于改进SIFT图像匹配的无人机高精度避障算法,提高无人机高精度避障的输出稳定性和路径空间规划能力,其高精度避障控制的路径规划能力和避障精度得到保证。
猜你喜欢
疯狂英语·新策略(2019年10期)2019-12-13 08:43:28
当代陕西(2019年10期)2019-06-03 10:12:04
电子技术与软件工程(2018年10期)2018-07-16 12:04:18
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
数学小灵通·3-4年级(2017年9期)2017-10-13 08:10:54
电子科技(2016年12期)2016-12-26 02:25:49
光学精密工程(2016年3期)2016-11-07 09:03:34
系统工程与电子技术(2016年4期)2016-08-24 07:46:28
测绘科学与工程(2016年6期)2016-04-17 06:51:25
山东冶金(2015年5期)2015-12-10 03:27:41