激光测风雷达风场探测性能评估
2022-02-23 10:26:36赵文凯赵世军单雨龙孙学金
中国测试 2022年1期
赵文凯,赵世军,单雨龙,孙学金
(国防科技大学气象海洋学院,江苏 南京 211101)
0 引 言
大气风场作为一项重要气象要素,与人们的生产生活息息相关,对大气风场进行精准探测越来越受到人们的重视。现有测风手段虽能满足基本测风需求,但均存在明显不足。激光测风雷达作为新型测风设备,利用多普勒原理[1]获取风向、风速信息,具有能够探测晴空风场、测风范围广、探测精度高、时空分辨率高、机动性能好的优点,其在风场精准探测领域具有重要应用前景。
激光测风雷达按照探测方式可分为相干激光测风雷达和非相干激光测风雷达,本研究所用激光测风雷达为相干探测方式。目前国外许多国家已经成功研制出相干激光测风雷达系统。1970年,美国雷神公司研制出世界上第一台脉冲相干激光测风雷达[2];1987年,斯坦福大学研发出波长为1.06 µm的相干激光测风雷达,实现了600 m范围的风场探测[3]。1988年,美国相干技术公司(CTI)增强了激光测风雷达的风场探测能力,研发出可对3.75 km的水平风场进行探测的激光雷达[4];1990年,美国的Henderson课题组研制的相干激光测风雷达系统,风场探测范围进一步扩大,可实现水平距离20 km范围的风场探测[5];2001年,日本三菱电器公司研制出世界上第一台1.54 µm波段的相干激光测风雷达[6],该激光雷达系统采用光纤通信技术,提升工作效率的同时,也降低了成本;2002年,美国Lockheed Martin公司研发出波长为2.0 µm的WindTracer商用相干激光测风雷达系统[7],进一步保证了激光对于人眼的安全。
国内对激光测风技术的研究起步较晚。近年来,国内在激光测风雷达的研制方面取得了较快发展。2010年,中国电子科技集团公司第二十七研究所研制出波长为1.5 µm的激光测风实验装置[8],空间分辨率为 50 m,室外速度分辨率 1 m/s[9],实现了 200 m的风速测量;2011年,西南技术物理研究所研制出1.55 µm全光纤相干激光测风雷达,可探测5~200 m范围内的大气风场[10];2012年,中国科学院上海精密光学机械研究所研制了1.539 µm全光纤相干激光测风雷达[11],在2014年进行升级后,风场探测能力得到增强,可实现3 km的风场探测;2014年,中国海洋大学研制了1.55 µm全光纤相干激光测风雷达[12],并推出了商用的WindPrint系统。2017年,中国科学技术大学研制出相干多普勒测风激光雷达[13],采用5 kHz重复频率工作时,可以实现水平距离6 km的大气风场。
实验中使用的激光测风雷达为相干脉冲机制,激光器工作波长为1.55 µm,可探测垂直高度上30~1000 m范围内的风向风速,风速测量允许误差±0.3 m/s,风向测量允许误差±2°,具有高精度、高分辨率、大探测范围等优点。
未来,激光测风雷达将进入气象业务系统,作为以气球轨迹法空中风测量方式的补充或升级。在激光测风雷达投入业务应用之前,需对其测风数据的可靠性进行评估,对其在不同天气条件下的工作性能进行分析。目前激光测风雷达测风性能评估的难点在于真实风场难以获得。本文从气象业务应用的需求出发,将探空气球风场数据作为真值,区分不同天气条件、不同高度区间、不同风速区间对激光测风雷达的风场数据有效性进行分析,据此评估激光测风雷达的风场探测性能。
1 激光测风雷达垂直风场反演原理
激光测风雷达将大气中的气溶胶粒子作为探测对象,通过接收气溶胶粒子对于激光的散射回波,计算多普勒频移,从而得到气溶胶粒子的运动速度,根据气溶胶的运动反演大气风场。目前,激光测风雷达垂直风场数据产品主要是根据速度方位显示(velocity azimuth display, VAD)扫描及与之对应的VAD算法反演获得。激光测风雷达VAD扫描如图1所示,扫描时激光雷达保持固定的仰角,通常仰角较大,方位角改变360°,激光光束的扫描面构成一个圆锥面。

图1 激光测风雷达VAD扫描示意图
VAD算法的中心思想是将大气中气溶胶粒子的运动速度分解为水平方向上的运动速度vh,和垂直方向上的运动速度vf。算法原理如图2所示,以正北方向为x轴的正向,正东方向为y轴的正向建立直角坐标系。
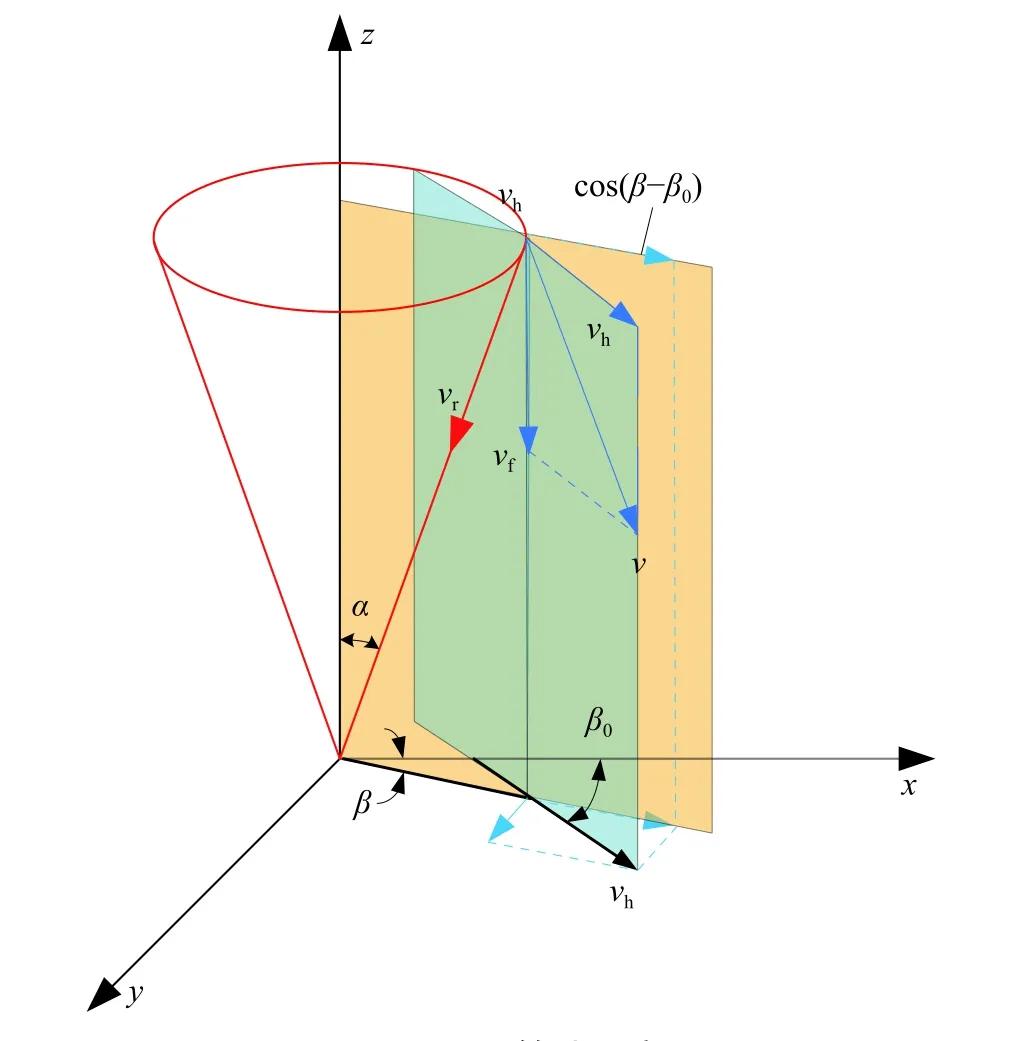
图2 VAD算法示意图
图中 β0为水平风方向与x轴的夹角,即水平风风向;β为激光光束的方位角;α为激光光束的天顶角。则激光测风扫描得到的径向风速可表示为:

假设在固定高度层风场是均匀分布的,即vf、vh和 β0不随方位角发生变化。则由上式可以看出,当激光测风雷达以一固定仰角扫描时(α保持不变),不同方位的径向风速随方位角的变化满足余弦关系,并叠加一个常数值vfcosα。因此可根据同一高度层多个方位上的测风数据进行余弦拟合,得出水平风向、风速。
2 激光测风雷达探测性能评估实验
2.1 实验设备
实验所用激光测风雷达为相干脉冲激光测风雷达,性能指标参数如表1所示。
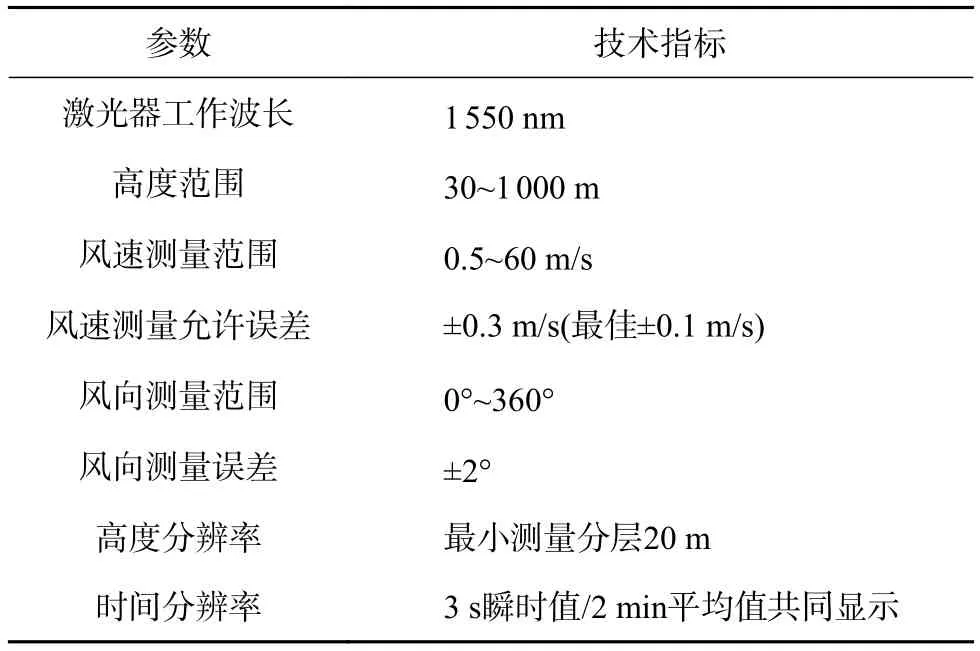
表1 激光测风雷达参数
用于比对的数据取自南京市国家基准气候站的L波段高空气象探测雷达。该型雷达主要用于高空大气的综合性观测,工作时与GTS1型数字式电子探空仪相互配合,可获取大气温、压、湿、风等气象要素信息。其获取风场信息的主要原理是以气球为示踪物指代大气的运动,通过追踪气球位置计算出风场情况。GFE(L)1型雷达主要参数如表2所示。
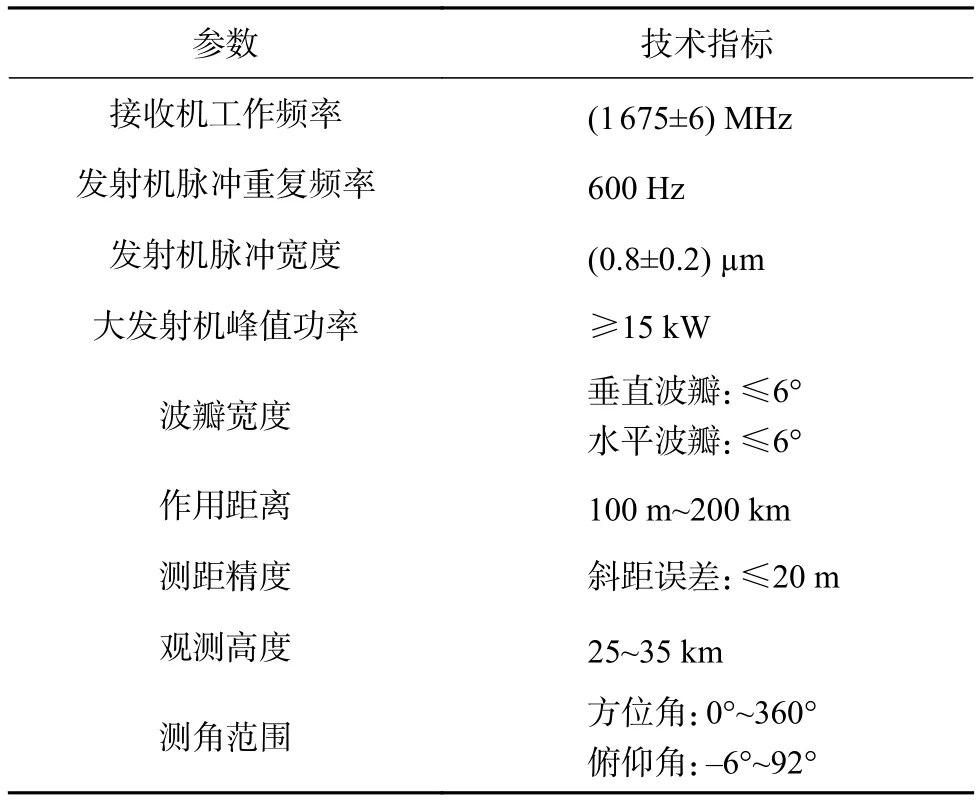
表2 L波段高空气象探测雷达参数
2.2 实验方案
激光测风雷达安装在国防科技大学气象海洋学院双龙街校区的长望楼楼顶,海拔高度约为40 m,南京市国家基准气候站海拔高度约为36 m,两地间直线距离约为9.4 km,见图3。激光测风雷达每30 s做一次扫描,每次扫描可获取垂直方向上约30~1000 m高度范围内的风向、风速信息,雷达库长为20 m,即每一个数据点代表20 m范围内的风场状况。探空气球升速约为6 m/s,每秒一个数据,即探空气球风速数据空间分辨率约为6 m。因此,需将激光测风雷达数据在高度上进行插值,得到与气球探空数据空间相匹配的风场数据。虽然探空气球在上升的过程中会随风飘移,但是根据大气连续性特征,可以认为在一定水平范围内,相同高度上的大气是均一的,因此可以忽略气球水平方向上飘移的影响。根据探空气球到达各高度层的时刻,提取出对应时刻相同高度上的激光雷达测风数据,从而实现两种测风数据时空上的匹配。

图3 实验设备相对位置图
2.3 分析方法
激光测风雷达是根据气溶胶粒子运动产生的多普勒效应反演得到的风场信息,属于间接探测。而气球探空是以气球为示踪物直接反映大气的运动状况,属于直接探测,可信度较高,并已广泛应用于气象业务当中。因此,在进行数据比对时,将气球探空数据作为基准,分析激光测风雷达测风性能。主要分析流程如图4所示。将处理得到的时空匹配数据按照天气类型分为晴天、阴天、雨天3种,评估不同天气状况下激光测风雷达性能;对每种天气条件下的数据再分别按照风速区间和高度层进行划分,评估激光测风雷达对不同大小风速及不同高度风场的探测性能。
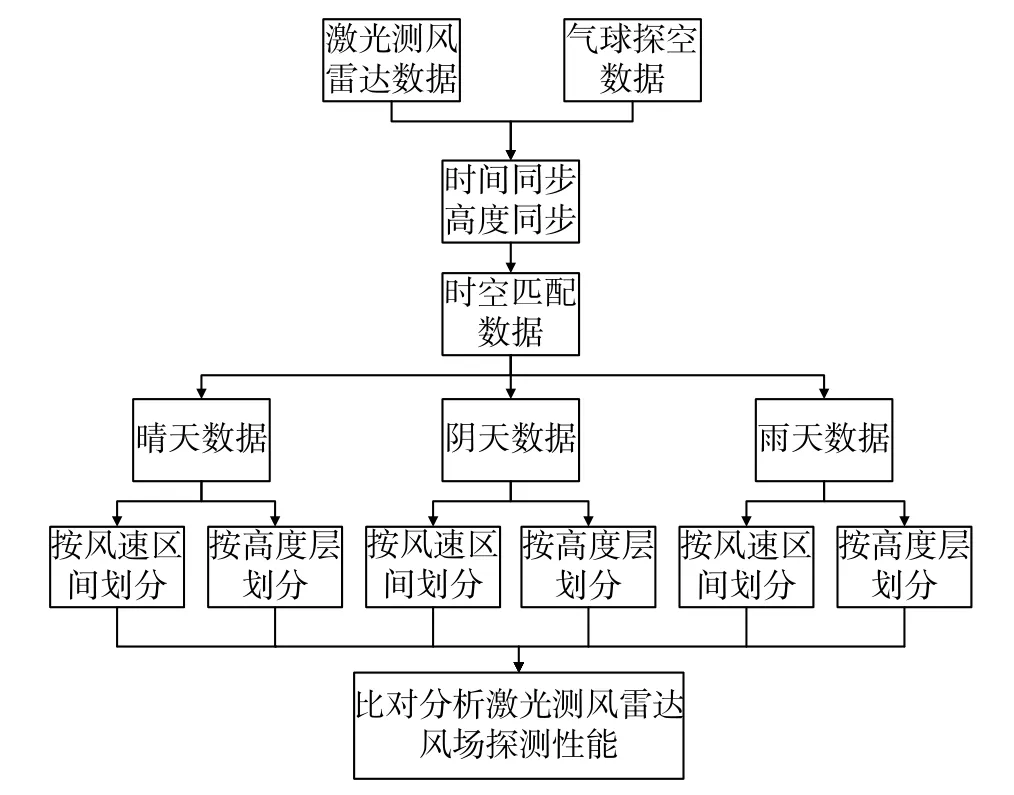
图4 激光测风雷达风场探测性能评估流程图
使用相关系数R和平均偏差AD来对激光测风雷达的测风性能进行评估,其计算公式如下:

式中:xi——激光测风雷达数据;
——激光测风雷达数据平均值;
yi——气球探空数据;
——气球探空数据平均值;
n——数据点的个数。
不同的天气状况对激光会产生不同的影响。通常来讲,天气状况越差,大气消光系数越大,大气对激光的衰减就越大,从而影响到激光测风雷达的探测性能。因此,将时空匹配后得到比对数据按照天气状况分为3类:晴天、阴天和雨天。对不同天气类型时的激光雷达探测性能进行比较分析。
在对两种测风数据的风向数据进行比对时会出现过零现象。过零现象是指风向在零度附近数值上相差很大,而实际上相差很小的现象,例如,1°和359°在数值上相差了358°而实际上两个风向只有2°的差异。因此就要对风向进行过零处理,具体方法为:对两风向值作差,如果两风向差值的绝对值大于180°,则给较小风向加上360°。
3 激光测风雷达风场探测性能分析
激光测风雷达在2019年3月17日至2019年4月12日之间获取了近一个月的测风数据。激光测风雷达可以做到全天时扫描,30 s获取一次风场数据。高空气象探测的放球时间是固定每天的07:15 和 19:15。将激光测风雷达风场数据与气球探空获得的风场数据进行时空匹配后共得到32组比对数据。
3.1 整体分析
如图5所示,对不同天气类型下的两种测风数据分别做一元线性拟合,图中“”的横坐标为气球探空所得风向或风速,纵坐标为时空对应的激光测风雷达测得的风向或风速。图中斜线为拟合直线。

图5 不同天气类型激光雷达测风数据与气球探空数据一元拟合
两种测风方式的风速数据在晴天、阴天、雨天的相关系数分别为 0.89469、0.87636、0.77253。随着天气状况变差,相关系数逐渐变小,这说明天气条件不好时,激光测风雷达测风性能会有所下降。晴天与阴天时的相关系数相差不大,说明阴天对于激光测风雷达的探测性能并没有造成太大影响,但晴天与阴天的相关系数均明显大于雨天时的相关系数,这就说明雨天对于激光雷达测风性能会造成较大影响。
两种测风方式的风向数据在晴天、阴天、雨天的相关系数分别为 0.97407、0.99404、0.95904。整体上风向的相关系数要大于风速的相关系数,且不同天气条件时的相关系数差别均不是很大,这说明激光测风雷达的风向探测性能要优于风速探测性能。与风速比对结果不同的是,阴天时两种数据的相关系数略大于晴天时的相关系数,主要原因是本次实验采集到的阴天测风数据要少于晴天时的测风数据,所以与晴天数据相比,阴天数据中的质量较差数据也相对较少;另一方面,由于激光测风雷达的风向探测性能优于风速探测性能,风向探测的稳定性更好,因此受到不良天气条件的影响也较小。综合上述两个原因,出现了阴天时相关系数大于晴天的情况。但是无论是晴天还是阴天,相关系数均比雨天时的大,这也再次印证了雨天对于激光测风雷达的探测性能会造成较大影响。
3.2 按高度层分类分析
将不同天气条件下两种测风数据按照高度层进行划分,分析不同高度层两种测风数据的平均偏差。考虑到两种测风设备相距较远,近地层的测风结果会有较大差异,因此选取200 m为第一高度层,实验选用的激光测风雷达最大探测距离约为1000 m,因此将900 m高度以上选为最后一个高度层,中间按照100 m的间隔进行分层。各高度层的风向、风速平均偏差如图6所示。
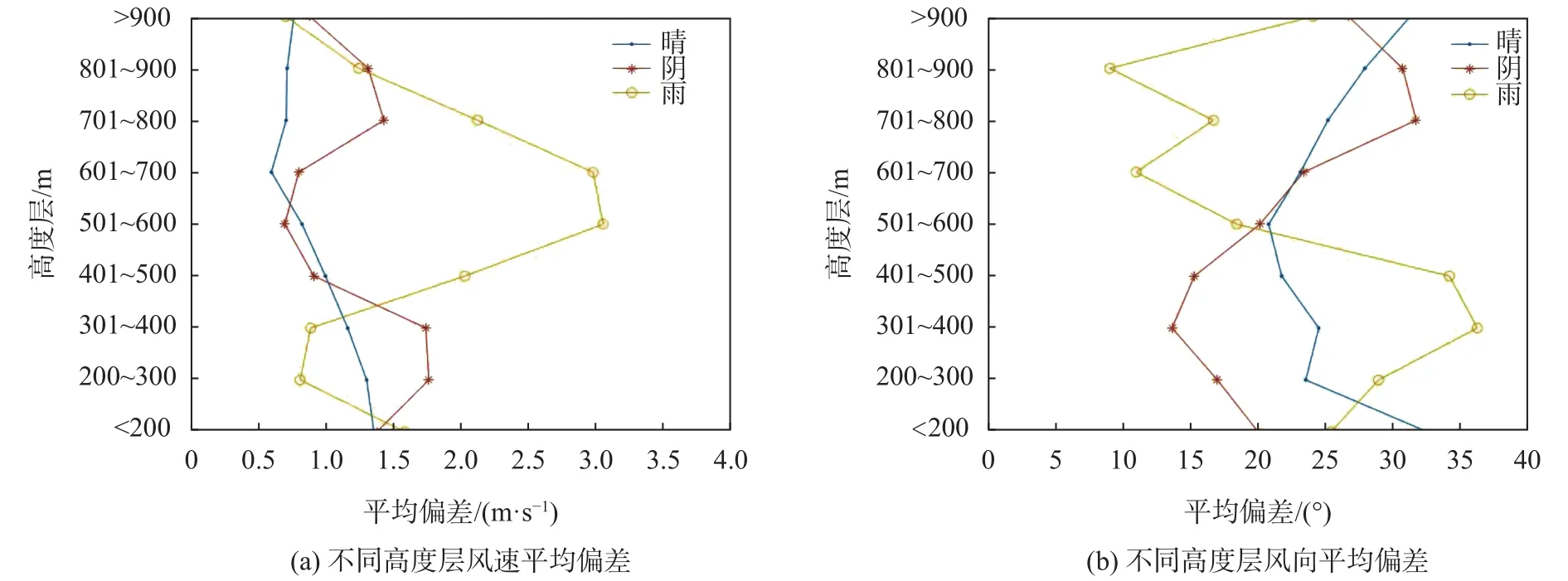
图6 不同高度层激光测风雷达数据与气球探空数据的平均偏差
从图中可以看出无论是风向还是风速,随着高度的变化平均偏差均会出现一定程度的波动。在3种天气类型中,晴天时平均偏差随高度的波动最小,相对而言更加稳定。因此可从晴天时平均偏差随高度的变化分析激光测风雷达在各高度层的探测精度。从图中可以看出,晴天时,随着高度的增加,无论是风向还是风速,平均偏差均呈现先减小后增大的趋势,转折点大约在600 m高度。较低高度层与较高高度层平均偏差较大的原因主要为:在近地面层大气风场受地形等因素影响较大,加之实验中两设备相距较远,测风结果会出现较大差异;在较高的高度层偏差较大主要有两方面原因,一方面激光测风雷达以气溶胶粒子为示踪物,在对流层内气溶胶浓度随高度的增加按指数减少,再加上随着探测距离的增加光强衰减加剧,激光测风雷达的探测性能有所下降;另一方面,激光测风雷达采用VAD算法反演垂直风场时假定大气风场是水平均一的,而随着高度的增加各激光光束之间的距离增大,反演结果代表的水平风场范围增大,大气的水平均一性逐渐减弱,算法本身的误差也会增大。因此可知,在转折点处(约600 m高度)最能体现激光测风雷达的真实探测性能,风速偏差约为1 m/s,风向偏差约为20°。
阴天和雨天时,随着高度的变化,无论是风向还是风速,两种测风数据的平均偏差均出现较大程度的波动,且雨天时的波动程度最为显著,这也体现出了不良天气条件对于激光测风雷达探测性能的影响。由于雨滴会对激光造成很大程度的衰减,因此雨天时两种测风数据会出现很大的偏差,其中风速的最大偏差达到3.05 m/s,约为平均风速7.62 m/s的40%,风向的最大偏差达到31.65°。
3.3 按风速区间分类分析
将不同天气条件下两种测风数据按照气球探空测得的风速区间进行划分,分析不同风速时两种测风数据的平均偏差。根据实际测得的风速情况,将风速小于4 m/s作为第一个区间,风速大于10 m/s作为最后一个区间,中间层按照1 m/s的间隔进行划分。各风速区间的风向、风速平均偏差如图7所示。
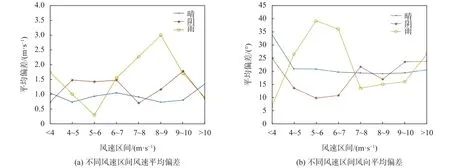
图7 不同风速区间激光测风雷达数据与气球探空数据的平均偏差
从图中可以看出晴天时两种测风数据的风速平均偏差基本稳定在1 m/s,说明激光测风雷达的风速探测精度基本不受风速变化的影响。两种数据的风向平均偏差在风速大于4 m/s时稳定性良好,基本保持在20°,当风速小于4 m/s时,平均偏差突增至34°,说明激光测风雷达的风向探测精度受小风速的影响很大。分析其原因为:当风速比较小时,激光测风雷达的回波信号很弱,有用信号与杂波信号混合在一起,影响了雷达信号处理系统对于谱峰的识别,可能会反演出错误的风向结果,从而降低了激光测风雷达风向探测精度。
阴天和雨天时,两种测风结果的风向、风速平均偏差均出现较大波动,再次说明了不良天气条件对于激光测风雷达探测性能的影响。其中雨天时的波动最为显著,风速的最大平均偏差达到2.99 m/s,风向的最大平均偏差达到39°。
4 结束语
本文主要分析了激光测风雷达的VAD风场扫描方式以及VAD风场反演算法。将激光测风雷达风场数据与气球探空风场数据进行时空同步处理,得到时间和空间上相匹配的32组数据。并引入相关系数和平均偏差,评估激光测风雷达在不同天气条件、不同风速区间、不同高度范围的风场探测性能,得到以下结论:
1)晴天时激光测风雷达具有良好的探测性能,并且风向的探测性能要优于风速的探测性能;不良天气条件会对激光测风雷达的探测性能造成一定程度的影响,雨天的影响最为显著。
2)随着探测高度的增加,受扫描方式和反演算法两方面的影响,激光测风雷达的探测精度逐渐下降。
3)激光测风雷达的风速探测性能基本不受风速变化影响,风向探测性能除在小风速时会受较大程度影响外也基本保持稳定。
4)激光测风雷达具有较高的探测精度,风速偏差约为 1 m/s,风向偏差约为 20°。
本文工作还存在一些不足,有待后期的进一步研究。首先,本文使用的数据容量相对较小,后期可获取更长时间范围内的风场数据进行比对分析;其次,比对仪器相对较少,后期可将激光测风雷达与风廓线仪、多普勒天气雷达等多种测风手段进行比较,分析各种风场探测手段的优劣;在天气类型分类方面,后期可对天气类型进一步细化,增加多云、雾霾等多种天气类型,得出更为细致的分析结论。
猜你喜欢
震灾防御技术(2023年4期)2023-03-01 10:58:36
成都信息工程大学学报(2021年5期)2021-12-30 06:25:16
中国海洋大学学报(自然科学版)(2020年12期)2020-11-04 08:03:40
重庆交通大学学报(自然科学版)(2018年8期)2018-07-30 10:12:22
能源(2017年8期)2017-10-18 00:47:39
通信电源技术(2016年1期)2016-04-16 04:57:35
中国医药导报(2015年6期)2015-03-13 00:24:39
科技创新导报(2014年2期)2014-06-14 13:48:48
中国民航大学学报(2014年5期)2014-03-14 03:36:30
化学工业与工程(2012年6期)2012-02-10 03:21:01