船舶曳引系统冲击力稳定性分析与验证
2022-02-22 02:25:34陈文博潘志翔
中国修船 2022年1期
陈文博,高 岚,潘志翔,李 迟
(武汉理工大学 能源与动力工程学院,湖北 武汉 430063)
乌江地形地质条件复杂,乌江航道1 000 DWT运输船标准船型体态较大,由于长距离隧洞内光线暗、船-岸富余距离较小,对航行的稳定性有较高的要求,因此采用一种船舶曳引系统来通过隧洞。这种应用于隧洞中的曳引系统,通过应用于船坞中的引船系统改进而来[1],由驱动机构、导向机构、传动机构、供电系统、控制系统等组成,设置在船坞两侧的牵引系统带动牵引车随船运行,并为船舶提供牵引力与横向拉力。
引船系统在国内外较宽航道中已经有较多的应用,如国外巴拿马船闸[2],国内的齐俊麟论证了这种引船技术在三峡船闸的应用前景[3]。当前的研究表明,此类牵引系统在正常通航环境下,能够有效维持船舶进出稳定性,而对于此类牵引系统在受到侧面冲击力等突发情况时,船舶稳定性的相关研究是缺乏的。因此本文通过模拟曳引系统运行过程,探究了船舶受到冲击力时特殊条件下的运动情况,重点研究了缆绳内部预紧力以及牵引速度对船舶偏移量的影响,其相关结论可为船舶曳引系统在隧洞中的应用提供理论支持。
1 船舶曳引系统运动学分析
1.1 船舶曳引系统仿真分析
引船系统设计研究表明,当牵引绞车沿引船轨道运行时,除承受纵向拉力外,还要承受横向回复力[4],图1为被牵引船(船模)离散体模型。
图1中,x为船模在t时刻发生的横向位移,f(t)为船模在t时刻受到的冲击力,k为模拟牵引绳弹性系数,c为阻尼系数。

图1 被牵引船(船模)离散体模型
理论上,牵引绳等效拉力可近似看作弹簧恢复力。关于船模横向平移问题,曳引系统收放牵引绳横向偏移时,由于偏移位移相对于船体宽度来说较小,且伺服电机响应速度较快,牵引外力可看作突加载荷。通过黏性阻尼器和无质量弹簧等效的牵引绳不会在横向位置减少自由度,且根据计算的单根牵引绳的等效刚度和等效阻尼,可以对不同受力情况下的阻尼和刚度进行定义。根据水的黏性阻力系数与标准船型下的船模湿水面积,从STARCCM+模拟得出阻尼比为0.7。单侧缆绳总等效刚度为280 N/mm,以牵引角度30°为例,每根牵引绳等效刚度为162 N/mm。
建立曳引系统三维模型,确定模型中柔性连接处以及船体接触处库伦摩擦代换等效参数,将模型连接处进行布尔操作,传动机构和电机等关键部位在ADAMS仿真软件内进行参数化建模并给予替换。ADAMS导入模型后,根据实验室实验需求和环境要求,从STARCCM+中算出转化为ADAMS相关等效参数进行模拟分析。经过相关参数和运动副的设定,在建模过程中对除计算域外的结构做出简化,并进行曳引系统运动学仿真。船舶曳引系统模型见图2。
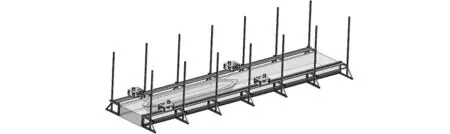
图2 船舶曳引系统模型
1.2 外部冲击载荷对船舶稳定性的影响
曳引系统在运行之前,内部载荷大小对稳定性的影响可以从2方面考虑:一方面缆绳预紧力大,船模所处的位置就相对固定;另一方面如果缆绳预紧力过大,外部激励作用下的响应速度也就相对要快,对船体和牵引车都产生较大的冲击力,同时对牵引绳强度和耐用性要求较高。根据模拟冲量相似的方案[5],仿真时分别设置缆绳对船舶的预紧力为20 N和10 N,并设定作用于船模质心x轴正方向、大小为1 800 N和3 200 N的作用力在第2秒施加力达到峰值之后,立刻在第3秒消失。不同预紧力时,1 800 N和3 200 N冲击力下船模质心位置横向偏移分别如图3和图4所示。
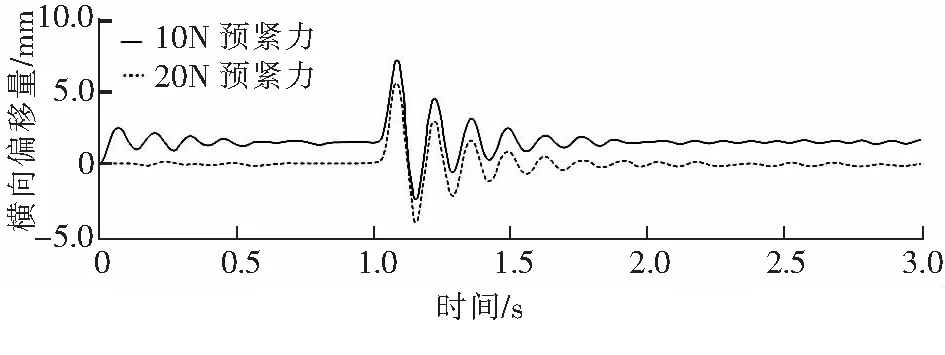
图3 不同预紧力时,1 800 N冲击力下船模质心位置横向偏移

图4 不同预紧力时,3 200 N冲击力下船模质心位置横向偏移
从图3和图4知,针对10 N和20 N的预紧力,在同样施加1 800 N或3 200 N的作用力下,虽然横向偏移大小相差无异,但是预紧力为10 N时曲线出现了整体的偏移。在预紧力不变的情况下,船体产生整体偏移并逐渐趋于稳定,但是却整体偏离航道中心线,在冲击力作用下船模处于偏航运行。船模运行开始阶段可以发现,预紧力为10 N时整体的横向振荡较大,这是由于预紧力较小,系统之间的结构力不足,牵引车运作时船模响应迟缓造成的船体偏移,虽在正常运行后基本处于平衡,但依然出现整体偏移,不满足长距离通航的要求。
从仿真结果中可以看出,牵引初期曳引系统预紧力偏低会导致船舶稳定性降低,因此设置牵引绳预紧力为20 N。
2 船舶曳引系统冲击力实验分析
根据实际通航隧洞环境、通航建筑物之间的连接渠道和渡槽等特殊限制性航道的特征,船舶在长距离封闭水域条件下运行时,航速应低于2 m/s。结合船舶宽度、吃水与航道尺度的关联性模型,对长距离通航隧洞曳引系统进行试验分析。设置航宽0.8 m,水深0.25 m,速度分别为0.335 m/s、0.313 m/s、0.219 m/s时的横向偏移量,探究船舶在运动中受到冲击力时的系统稳定性。
通过等比例缩小船舶与曳引系统,按照相似准则构建与实际相符合的船体结构、隧洞通航环境与曳引系统,并对船模数据进行采集,反映曳引系统的各种性能。实船速度与船模速度对比如表1所示,通航隧洞实际尺寸与模型尺寸对比如表2所示。
在运动过程中,船模始终在中轴线附近前进;受到波动影响后,由岸壁位置传感器和拉力传感器双变量反馈迅速调整船体姿态,使船模重新稳定。在第一个位置受到冲击力后,船模质心偏移波动并不大。在第二个位置受到冲击力时,船模质心的偏移量短时间内发生多次响应,这是由于牵引绳吸收了大部分能量,由相对松弛到迅速张紧,达到了牵引绳所能形变的最大值,牵引绳内张力迅速激增,并伴随船体震荡,在水中阻尼力和牵引绳拉力维持船体稳性的过程中,牵引绳多次受到逐渐减小的冲击力带来的脉冲作用力,直至横向激励带来的能量耗散完毕,船模质心恢复航线位置。不同速度下,船模最大偏移量见表3。

表1 实船速度与船模速度对比 m/s

表2 通航隧洞实际尺寸与模型尺寸对比 m

表3 不同速度下,船模最大偏移量
船模在不同速度下受到横向激励后,曳引系统都能够快速做出响应,使船模质心重新恢复到航线位置。在受到冲击力以外区域,船模横向运动处于动态平衡状态,预紧力数值保持基本恒定。由于船模在0.313 m/s时相对于另外2个速度下偏移量更为明显,因此进一步分析船模在0.313 m/s速度下的纵向位移和横向位移。图5为速度为0.313 m/s、1 800 N冲击力时,船模位移;图6为速度为0.313 m/s、3 200 N冲击力时,船模位移。

图5 速度为0.313 m/s、1 800 N冲击力时,船模位移

图6 速度为0.313 m/s、3 200 N冲击力时,船模位移
由图5、图6知,船模受到冲击力作用前,离岸距离为正常航行状况,受到侧向冲击力作用下,船模横向位移有限,整体船模在牵引车牵引下运行平稳。可以得出在不同航速下,船模均可抵抗横向冲击力,其中当引船速度为0.335 m/s时,受冲击力影响较小,且能够更快通过隧洞。
3 结束语
基于动力学计算进行仿真研究发现,在受冲击力作用时,若曳引系统预紧力偏低会导致船舶稳定性降低,合理的提高牵引预紧力有利于提高船舶稳定性。通过模型分析可以看出,船舶曳引系统能够承受一定量的外部冲击力,但是对于其能承受的最大冲击力还需进一步的研究。
猜你喜欢
恋爱婚姻家庭·养生版(2023年12期)2024-01-11 02:32:46
微型电脑应用(2022年12期)2023-01-30 13:40:26
百姓生活(2021年2期)2021-05-06 15:30:58
中国特种设备安全(2019年11期)2020-01-16 08:05:50
中国特种设备安全(2018年12期)2018-03-15 05:35:00
质量技术监督研究(2017年4期)2017-05-07 13:32:04
高中时代(2017年1期)2017-04-10 21:29:17
工业设计(2016年5期)2016-05-04 04:00:52
舰船科学技术(2016年1期)2016-02-27 15:39:15
航海(2014年6期)2014-12-12 10:36:03