FAST 主动反射面的形状调节研究
2022-02-21 01:45:40胡翔宇
科学技术创新 2022年2期
胡翔宇
(江苏大学卓越学院,江苏 镇江 212000)
1 研究背景
FAST 的主动反射面系统[1]的主体结构是一个口径500m 的可调节球面[2],主动反射面可分为两个状态:基准态和工作态。该反射面可主动变换形状,形成工作抛物面[2]。
2 理想反射面模型
观测天体S 位于基准球面正上方,促动器的伸缩范围为-0.6 至+0.6 米且其伸缩沿着基准球面径向(故抛物面顶点的移动范围也为-0.6 至+0.6 米)。我们拟应用粒子群智能算法在主索节点变化范围内以最大调整距离最小作目标函数搜索最优的伸缩量,从而确定理想抛物面。
2.1 模型的建立
可知球心C 为原点。抛物面的焦点在以坐标C 为原点,以0.534R 为半径的球面上,天体S 位于球面正上方,SC 的连线与焦面的交点为P(0,0,-0.534R)示意图如图1 所示[3]。
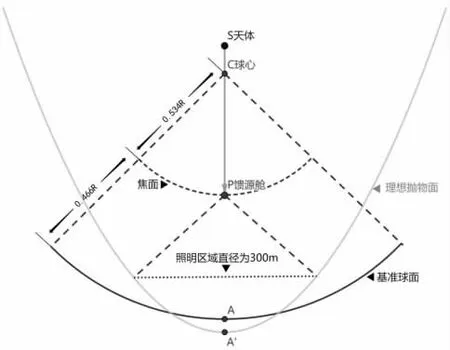
图1 示意图
我们设基准球面的最低点为A,则A 处下拉索的伸缩方向即为竖直方向,且由于促动器伸缩范围的为[-0.6,+0.6],考虑到反射面板调节的因素,得到抛物面焦距的取值范围为:

则抛物面的方程为:

同时仅用到了下半球面的基准球面的球面方程为:

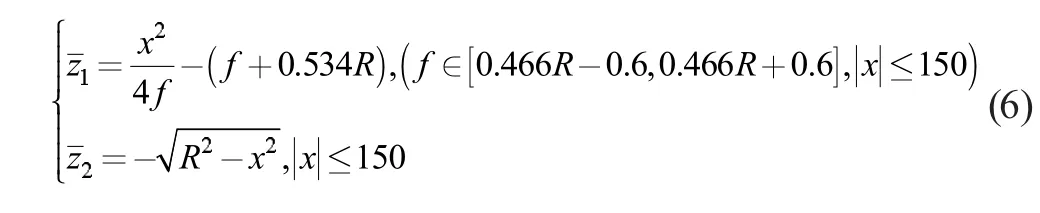
根据馈源舱的照明范围直径为300m,由图形的对称性,因此照明区域内节点应在半径为150m 的圆内,即:

因此联立上述方程,我们可以得到:

由于两者均具有关于z 轴的各向同性,因此令x2=x2+y2,则联立方程组可化简为:
为方便数学计算推导,我们进行极坐标变换,即:
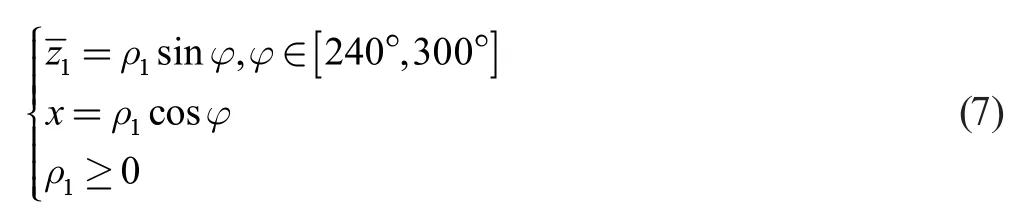
可以得到:

根据一元二次方程的求根公式,由于考虑到ρ1≥0,于是我们舍去负根,得到ρ1的表达式为:

而当φ 为270 度时,cos φ 为0,因此此时公式(11)为一元一次方程,所以得到ρ1的表达式为:

我们定义抛物面与球面的径向距离为ρ0,其中ρ2=R,则ρ0可以表示为:

我们对焦距的取值区间进行离散化, 得到{f0,. . . ,fn},其中f0=0.466R-0.6,fn=0.466R+0.6,我们取所有ρ0中最大的为ai,即:

则根据焦距f 的变化,得到关于ai的集合S,而记S 中的最小值为a*,即:

为使反射面板调节尽量均衡,即寻求最小的径向调整距离,因此我们的搜索目标即为:

搜索获得最小的a*,其对应的fi记为f*,则得到理想抛物面的表达式即为:

2.2 模型的求解
为了在促动器的限制范围内搜索最优焦距,从而确定理想抛物面,我们采用粒子群算法,以焦距f 为待优化参数,以a*为适应度函数,则优化模型如下:
搜索目标函数:min a*

通过粒子群算法进行全局搜索求得最优解.
3 结论分析
我们求解得到最优的焦距f 为140.1324m,同时由几何关系: f = 0.466R + h,得到A 点的最优伸缩距离h 为0.3324m。各节点对应伸缩距离的三维空间图,基准球面与理想抛物面的二维截面图像如图2、3 所示。
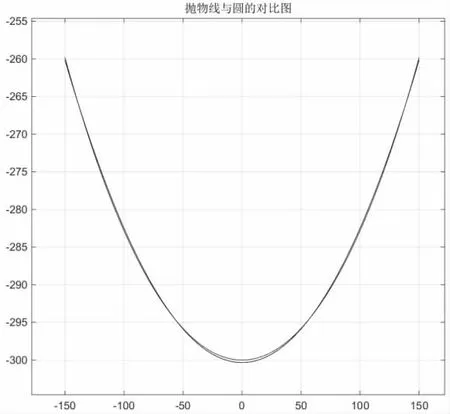
图2 二维伸缩距离与三维伸缩距离

图3 二维基准球面与理想抛物面截面图
可以观察到曲线交替变换,且其幅度较为均衡,符合我们寻求调整最为均衡的目标,图片证明了所得理想抛物面在调节上的均衡性,因此结果较为合理。
综上所述,在α=0°,β=90°时,结合反射面板调节因素,得到理想抛物面的方程为:

4 基准反射球面模型
4.1 模型的建立
由于计算光通量在角度上的变换较为复杂,于是为了便捷的确定馈源舱区域内的有效信号通量,我们通过坐标变换,将原抛物面转换为标准状态下的理想抛物面。
4.1.1 坐标变换
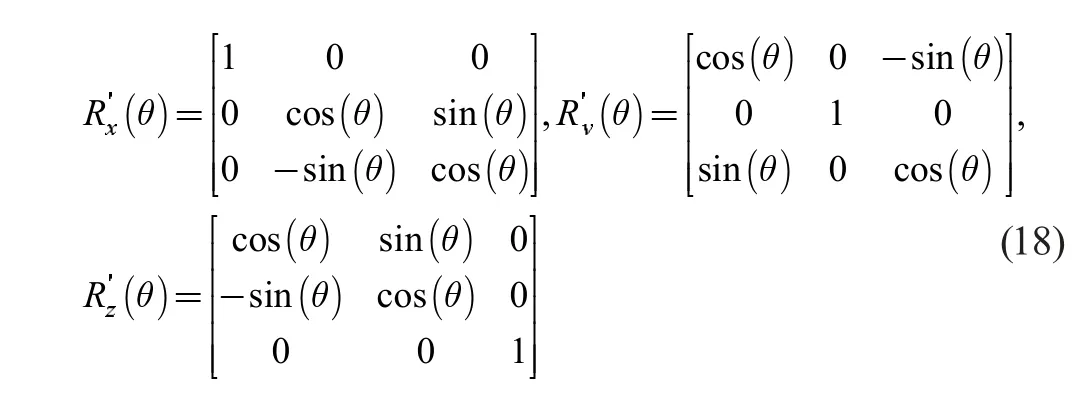
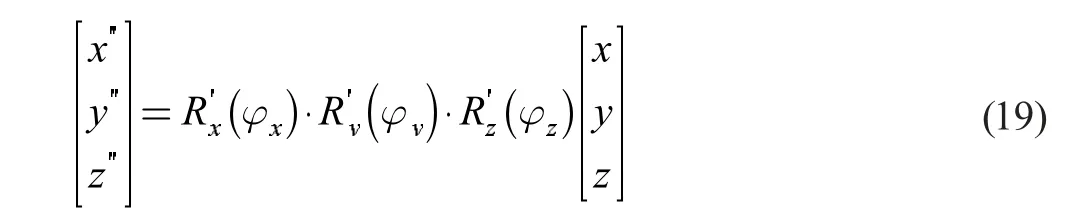
首先我们要将非标准位置调节后的节点坐标变换为标准位置的坐标,根据旋转矩阵公式,得到相应的XYZ 轴旋转矩阵为:
则非标准位置的抛物面对应节点变换到标准位置后的坐标即为:
随后结合求得的理想抛物面参数可以得到进行坐标变换后的理想抛物面球坐标方程,因此我们可以根据相同的方位角与仰角θ,φ 得到每一个节点(ri,θi,φi) 在相同方位角与仰角θ,φ 情况下对应的理想抛物面上半径ri*,故我们可运用最小二乘法优化节点位置。

同时由于节点调节的变化幅度小于0.07%,即可得到相应约束条件为:

由于促动器的调节范围为±0.6m,因此可得到相应约束为:

通过优化求解得到一系列节点调整后的球坐标(ri',θi',φi'),再将球坐标变换为空间直角坐标(xi',yi',zi')。
我们利用粒子群算法求解得到各节点的调整方案,各个节点调整距离以及调整前后的对比如图4 所示。

图4 主索节点调整方案对比
4.1.2 信号通量计算模型
由于馈源舱接收信号的有效范围为1m 直径的圆,因此在三维空间中我们可以写为:

然后设D1,D2,D3为变换后某个三角形的三个顶点,坐标为:D1(x1,y1,z1),D2(x2,y2,z2),D3(x3,y3,z3)。三角形D1,D2,D3的有效面积就是其投影到水平面上的三角形D1' D2' D3' 的面积。然后要求出反射光线,我们先求出三角形D1D2D3所在平面的方程,则有:

那么设三角形D1D2D3的单位法向量为则可以由平面方程得到:

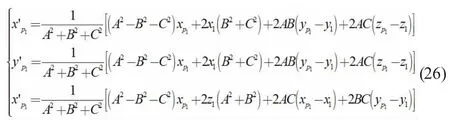
设P1为D1入射光线上一点,入射光线的方向向量为(0,0,-1),那么P1关于过D1的法向量所在直线的对称点P1'的坐标即可通过空间几何解得:
因此反射光线的方程即为:

接下来我们设LD1与馈源舱所在平面的交点为KD1,那么联立方程可算出交点的坐标:

同理我们可以算出KD2,KD3的坐标,然后可以算出三角形KD1KD2KD3的面积。
设Sj表示三角形与馈源舱有效区域重合部分的面积;设Hj表示三角形D1'D2'D3' 在三角形D1D2D3上反射到馈源舱并被接收到的信号,因此:

记馈源舱有效区域接收到反射信号与300 米口径内反射面的反射信号之比为N,则有:

4.2 模型的求解
由于判别信号是否有效的过程均为复杂,因此我们采用蒙特卡罗模拟法,具体流程为:则对于某一点P 求出与三角形ABC 的三个顶点构成向量P■→A,P■→B,P■→C 的叉积。如果叉积是同号,则判断点P 在三角形内部即该三角形反射信号有效,否则反射信号无效。
4.3 结果分析
通过计算机编程以及模拟,我们得到馈源舱接收比为67.42%;馈源舱接收比与基准反射球面接收比的比值为5.26%,其分布如图5 所示。

图5 馈源舱信号接收与基准球面反射面信号接收
其经过抛物面调整后的馈源舱的信号接收比相对于以基准球面为反射面的馈源舱接收比有了明显提升,因此我们认为该计算结果是符合要求的。
猜你喜欢
风流一代·经典文摘(2024年2期)2024-02-28 00:59:46
天文研究与技术(2021年3期)2021-07-15 01:57:44
航天制造技术(2020年5期)2020-11-10 08:46:38
天文学报(2020年5期)2020-09-28 02:08:34
科技传播(2019年22期)2020-01-14 03:06:28
科教新报(2019年16期)2019-09-10 01:50:38
科学导报(2019年24期)2019-09-03 04:33:02
光学精密工程(2016年6期)2016-11-07 09:08:09
哈尔滨理工大学学报(2016年2期)2016-09-12 14:37:06
测绘科学与工程(2016年5期)2016-04-17 06:51:15