
城市交叉口联动控制研究
2022-02-17 07:39:38张文强
有色冶金设计与研究 2022年6期
张文强
(中国瑞林工程技术股份有限公司,江西 南昌 330038)
快速增长的机动车保有量给城市干道的交通负荷带来了巨大的压力,在不改变现有建成交通设施的基础上,仅通过调整交叉口信号协调控制参数,设置机动车“绿波带”是目前改善通行环境最有效的方法之一。有部分学者从城市交叉口干线协调的角度展开了相关研究,黄慧琼[1]在传统的干线协调系统周期和相位差的理论下,考虑车辆行驶状态对车辆排队消散的影响,建立采用最大绿波带法的动态车辆排队消散模型,从而对干线协调的重要参数相位差进行优化,简化了多交叉口信号联控的设计难度,并通过案例分析证明了模型方法在交通运行参数评价中的有效性。唐小军[2]为突破传统的城市干线协调控制方法多局限于定时控制的限制,建立基于感应协调控制的干线控制子区划分模型,选择以双向绿波带宽最大化为优化目标,在CORSIM仿真验证下,得到了优于SYNCHRO计算的配时优化方案。巴兴强[3]提出了适用于非对称放行相位和叠加相位的干线协调方法,该方法考虑了相位差波动宽度的影响,与以往常依据交通流平均速度求解相位差相比在适用范围和计算难度上均占有优势,可通过调整协调相位绿灯的启闭时刻来生成绿波方案。王忠宇[4]针对大型活动拥堵这一特定场景,基于红波和绿波理论研究精细化管控的相位差,考虑到特定场景拥堵特征、交通需求以及道路时空资源的影响,采用真实交通数据进行仿真测试,结果表明基于红波和绿波的协调控制不仅在运行参数上有所改善,还能够大幅度提升周边路网的运行效率,均分交通压力,改善出行品质。任慧[5]提出了在极易发生局部拥堵的路段应进行协调控制参数计算来判断是否适用于红绿波带协调控制,若一味地进行干线协调控制而不考虑实际状况会起到适得其反的效果。同时,还需对交通干线的整体状态进行监测,实时地对红绿波协调方案进行检验和优化。通过仿真实验,验证了干线局部交通拥堵协调控制方法的有效性。郭海锋[6]为提升城市连续交叉口效益低下的问题,在分析了上下游断面交通需求相关性的基础上,提出了车流到达率预测,并考虑到车辆到达时间与信号相位开启时间的联系,从而建立了干线交通双向绿波控制总延误模型,为求解该模型又设计了一种动态自适应混沌粒子群优化算法,最后通过SUMO仿真验证了模型及算法的有效性和应用效果。
上述关于城市干线协调的研究大多是通过优化求解干线协调的重要参数或设计改善绿波方案,与传统的城市干线协调设计方案相比,改善程度有限,且没能实际应用于交通流密集、出行特征明显的城市高校附近的干线上。为使干线协调方案能够在城市道路网中应用范围更加广泛,更能发挥价值。本文针对城市高校附近在出行高峰期间极易发生车辆拥堵,停车次数与车行延误时间不断增大的困境,考虑利用绿波协调控制的思路,在高校附近的干道上对相邻的几个交叉口实施信号联动控制,使到达交叉口的车辆可以遇到绿灯持续通过形成连续的交通流,改善整个道路干线的交通拥堵状态[7]。本文选取南昌市某高校附近的路段作为研究对象,提出信号联动控制的设计方法,通过SUMO仿真工具对干线信号联控进行模拟,对比现有单点交叉口信号配时的交通运行参数,来验证方法的有效性。
1 研究路段现状
1.1 道路位置及概况
本文研究的路段位于江西省南昌市经济开发区双港东大街,是南昌市经开区道路网的重要组成部分,是联系经开组团与其他片区的一条东西向城市通道性主干路,具有重要的交通功能并兼具集散功能。道路周边拥有教育科研用地(华东交通大学、江西理工大学南昌校区)、居住用地(鑫港社区、双港新村)以及商住混合用地,在出行高峰期间承担着较大体量的高校和住宅小区的集散交通流。
双港东大街设计车速为60 km/h,道路为三块板,实现对向分流,所选路段有3个相邻交叉口,从西到东分别为A路口(华东交通大学)、B路口(曰修路)、C路口(江西理工大学),研究区域示意图如图1所示。交叉口位置示意图如图2所示。

图1 研究区域示意
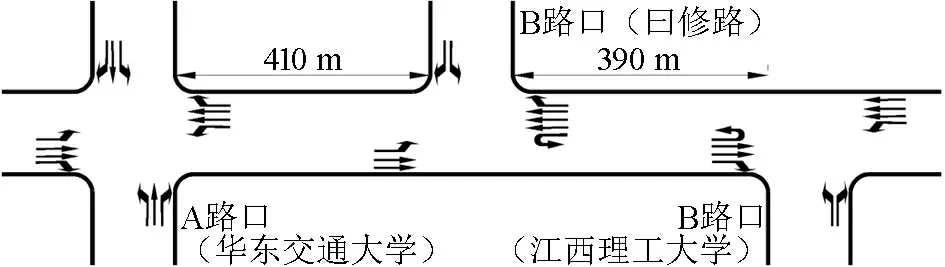
图2 交叉口位置示意
1.2 相位调查
通常在信号控制交叉口中,一个信号控制方案在一个周期内有几个信号相位及其顺序称为几相位的信号控制。考虑到过少的相位会扰乱交叉口的通行权降低行驶的安全性,而过多的相位会因相位转换浪费通行时间导致延误增加,所以合理的相位设置影响着交叉口通行效益的发挥。研究区域双港东大街上的A、B、C 3个信号交叉口均采用三相位信号控制,符合相位设置的原则。具体的相位设置如表1所示。
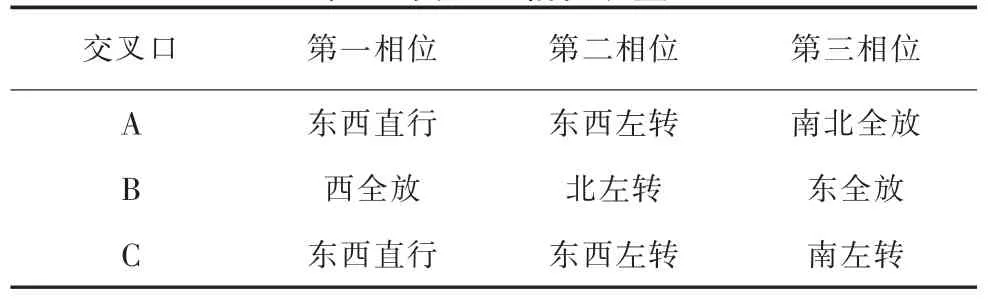
表1 交叉口相位设置
1.3 交通流量及车速调查
考虑到交叉口的交通量调查内容较复杂,需要包含各流量、流向等数据,所以选择采用人工计数的方法在每个交叉口的进口道位置分别统计直行、左转、右转的车流量。选取工作日(2022年3月14日,星期一)早高峰时段(7:30—8:30),对双港东大街3个交叉口的高峰小时交通流量流向进行调查,数据如表2所示。
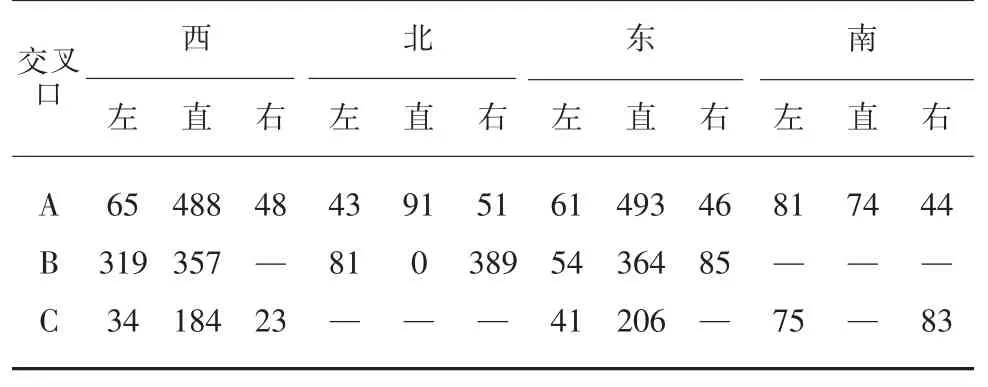
表2 高峰小时交通流量流向调查 pcu/h
采用雷达测速仪对图1研究区域的车辆运行速度进行测量,经过多次测量,获得该路段的平均车速为42 km/h。
1.4 现状信号配时调查
根据实地交通调查获取研究范围内A、B、C 3个信号交叉口的现状配时方案,各交叉口现状的配时参数均相互独立互无关联,信号周期时长也不相同,如表3所示,黄灯时长记为3 s。
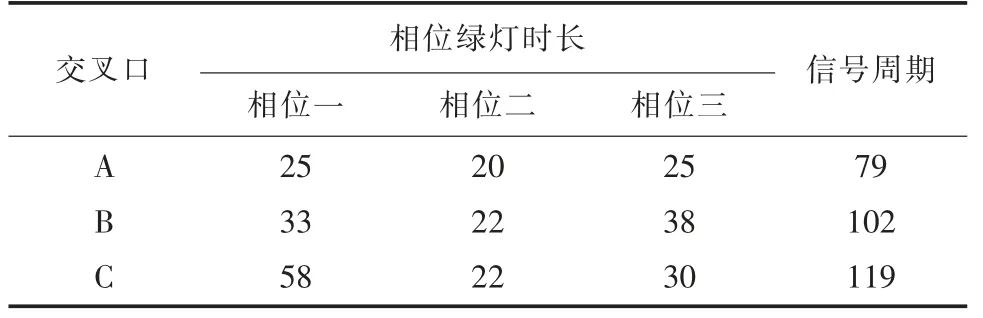
表3 交叉口现状信号配时方案 s
2 干线协调控制设计
干线协调控制是研究城市干道若干相邻的信号控制交叉口的协调联动控制关系,设计干道的信号配时方案,通过对干道多个相邻交叉口进行干线绿波协调控制,达到车辆能够多遇到绿灯通行,减少车辆遇到红灯等待时间的目的,以使干道车流保持较好的运行状态,确保司乘人员能够以较小的出行延误获得较高的出行品质。干线绿波协调控制的基本参数包括信号周期、相位绿灯时间、设计速度以及相位差等。
2.1 信号周期
信号周期时长在线控系统中一定程度上影响着车辆延误值和通行能力的大小,干线上各交叉口设置一致、合理的信号周期时长有利于信号协调联动控制的实施[8]。在确定信号周期系统时常常先按照单点信号周期计算的方法确定每个交叉口的周期长度,再从中选择最大的单点交叉口周期时长作为信号周期系统时长。则利用Webster配时方法[9]确定每1个交叉口信号周期时长的表达式为

式中:C0为最佳信号周期时长,s;L为信号周期的总损失时间,s;Y为所有相位最大流量比之和。则信号周期总损失时间的计算公式如下:

式中:l为启动损失时间,s,取3 s;Ii为第i相位末的绿灯间隔时间,s,取3 s;Ai为第i相位末的红灯间隔时间,s,取3 s。则所有相位最大流量比之和的计算公式如下:

式中:qi为第i相位的最大车流量直行当量值,pcu/h;ST为各进口直行饱和流率值,pcu/h,取1 600 pcu/h。
经计算得到,研究范围所选的A、B、C交叉口信号周期分别为91 s、125 s、100 s。依据系统信号周期时长为信号周期时长最大的原则,确定系统周期为125 s。
2.2 相位绿灯时间
在确定系统周期时长后,接下来需要对相位绿灯时间进行优化。计算每1个交叉口的有效绿灯时间表达式如下[10]:

式中:Ge为有效绿灯时长,s;C为系统周期时长,s。
按照绿灯时间分布是以减少车辆延误为原则来依据交通量分配相位绿灯时长的公式如下:

式中:gi为第i相位的有效绿灯时长,s;yi为第i相位的流量比。计算得到各交叉口的相位绿灯时长如表4所示。
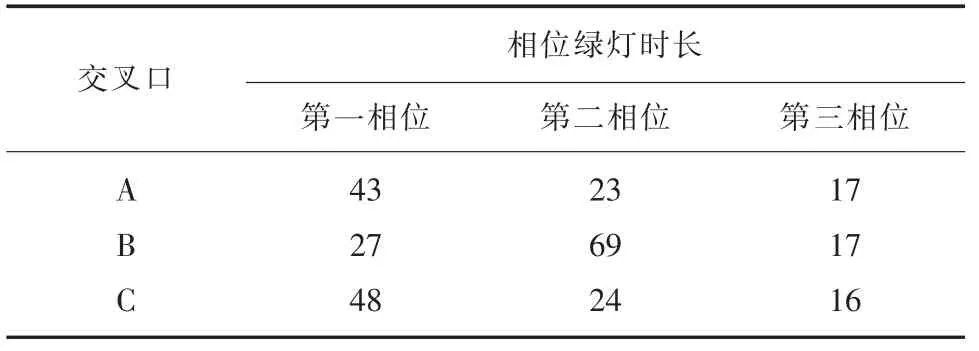
表4 各交叉口的相位绿灯时长 s
2.3 设计速度
根据交通调查,测量每条路段上的地点车速,最终计算得出平均车速为42.31 km/h,所以将带速暂定为42 km/h,即12 m/s。
2.4 相位差
相位差作为干线协调控制的关键参数,直接决定着干线信号协调联控的有效性。相位差通常是指绝对相位差,是各个交叉口主干道联动方向的信号绿灯(红灯)的起点或终点相对于关键交叉口主干道联动方向的信号绿灯(红灯)的时间之差。相位差的优劣决定着干线协调控制效果的好坏。相位差优化常用的两种思路是最大绿波带法和最小延误法,其中以最大绿波带为目标的相位差优化方法主要有图解法和数解法。
本文拟用图解法来描述系统的相位差,通过几何作图的形式来反映车流运行的时距图,该方法需要在交叉口间距和相位绿灯时间已知的前提下,对系统周期时长和通过带宽进行多次调试,以得到理想的相位差和绿波带。各交叉口之间的实际距离及行驶时间如表5所示。
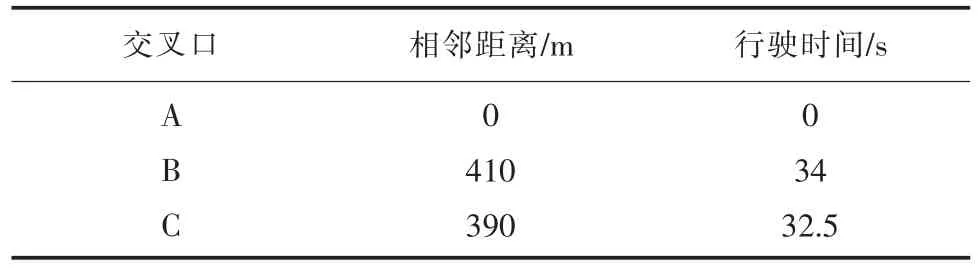
表5 各交叉口之间的实际距离及行驶时间
结合2.2节设计的各个交叉口信号配时方案,可以得到各交叉口绿波协调控制相位差:B路口相位差为32.5 s;C路口相位差为66.5 s。按照上述计算的各交叉口绝对相位差进行干线信号协调控制,得到的绿波带如图3所示。

图3 相位差时间—距离
3 仿真分析
借助开源、便捷的仿真工具SUMO(Simulation of Urban Mobility)搭建交通网络场景、生成车流量,并使用Python脚本语言编写算法控制交叉口信号时间,对联动控制前后的交通流状态进行仿真评价。与常见的仿真软件VISSIM相比,SUMO具有支持动态的路由和车辆换道模拟,易于提取车辆和道路信息,自带众多跟驰模型和换道模型,不仅可以导入VISUM、MATsim等信息,还可以利用TraCI接口用Python语言开发的优势。
仿真环境设置为红绿灯路口距离30 m,等待区长度40 m,道路限速60 km/h,车长4 m,停车间距1 m,其他参数使用默认值,仿真场景见图4所示。具体仿真过程如下:1)使用NetEdit工具编辑路网,生成mytest.net.xml文件。2)生成加载路由车流量文件mytest.rou.xml。由于现状道路交通量较小,基本不会产生行车延误,所以仿真时加载的车流数据为交通量较大的远景交通量。首先,需要定义车辆类型和其他属性参数,其次还要定义单个车辆,包括车辆驶入时间、驶入位置等信息。3)编写运行仿真文件mytest.sumocfg。需要输入路网文件和路由文件,设置仿真运行的时间。4)使用命令将tripinfo-timeLoss(行驶时间损失)数据导出。

图4 仿真场景示意
本次选择车辆延误时间作为评价指标,对比评价研究范围内多个交叉口联动控制前后的车辆延误结果如图5所示。
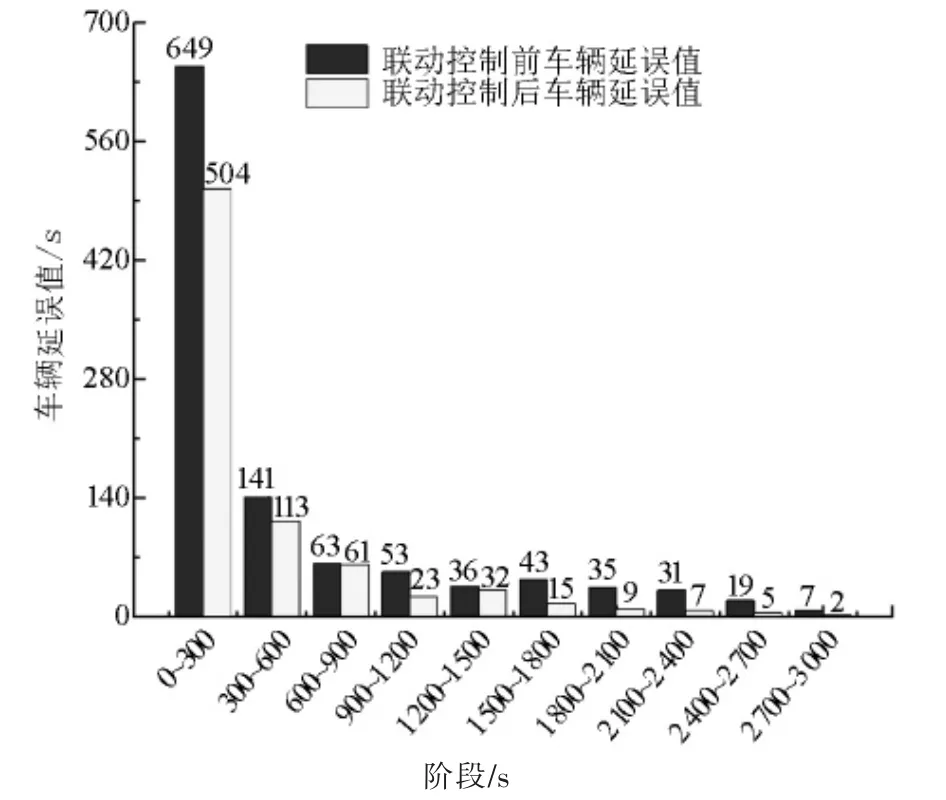
图5 联动控制前后车辆延误值对比
由图4可知,交叉口联动控制后的车辆延误值有所降低,尤其是在0~300 s阶段的车辆延误值减少了145 s。由此可知,相对于现有交叉口单点配时方案,本文提出的干线协调信号联动控制配时方案可有效降低车辆延误时间,通过绿波协调设计的绿波带提升了道路的交通效率,有效地缓解了交通拥挤的状况。
4 结语
本文从实际道路环境出发,为缓解交叉口信号控制缺陷带来的不良影响,尤其是针对城市高校附近的交通环境。利用绿波控制的思想,对多个相邻交叉口的信号控制参数进行联动协调控制,并搭建SUMO仿真场景进行对比分析,以提升道路通行效率和整体效益。在后续研究中,可将干线协调的范围扩大,将双港东大街与皇姑路交叉口、经开大道交叉口考虑在内,以最大限度地提升区域的道路通行量,为进一步从线控至面控的提升奠定基础。
猜你喜欢
汽车实用技术(2022年3期)2022-02-23 12:48:02
东坡赤壁诗词(2019年5期)2019-11-14 10:36:10
自动化学报(2017年4期)2017-06-15 20:28:55
池州学院学报(2015年3期)2016-01-05 01:13:18
江西通信科技(2015年3期)2015-12-05 05:52:04
筑路机械与施工机械化(2015年11期)2015-07-01 16:28:29
电网与清洁能源(2015年2期)2015-02-28 16:03:08
食品与生活(2014年9期)2014-09-27 16:25:30
电测与仪表(2014年22期)2014-04-04 11:55:06
吉林大学学报(工学版)(2013年1期)2013-08-16 07:16:48
