
基于虚拟同步发电机的逆变器类电源频率特性及重塑技术
2022-02-17 07:10董存陶以彬张牟发王士柏桑丙玉李志军张家安
电力建设 2022年2期
董存,陶以彬,张牟发,王士柏,桑丙玉,李志军,张家安
(1. 国家电力调度控制中心,北京市 100031;2. 中国电力科学研究院有限公司,南京市 210003;3. 河北工业大学人工智能与数据科学学院,天津市 300130;4. 国网山东省电力公司电力科学研究院,济南市 250003;5. 省部共建电工装备可靠性与智能化国家重点实验室(河北工业大学),天津市 300130)
0 引 言
微电网(microgrid,MG)是一个由分布式电源(distributed generator,DG)、储能设备、负载和相关的保护与控制设备组成的小型电力系统[1]。其内部的分布式电源主要由可再生能源、储能及传统能源构成。一般情况下,可再生能源、储能电源通过电力电子逆变器接入电网,传统电源通过同步发电机接入电网[2]。微电网中分布式电源可以分为以可再生能源机组为代表的逆变器类电源和以传统机组为代表的同步机类电源[3]。相对于同步机类电源,逆变器类电源通常具有较小的惯性,因此在两类电源都参与调频时,其频率的动、静态特性也存在较大的差异,并列运行时会造成分布式电源之间暂态功率的分配不均,不仅造成不必要的内部损耗,且会侵蚀系统的储备裕量,严重时可能导致逆变器类电源过载解列,引发系统级联崩溃[4-5]。
随着可再生能源高比例地接入系统,其参与调频的特性受到越来越多关注,文献[6]借鉴多时间尺度建模思想,基于电磁转矩分析,建立了含有风力机虚拟惯量的频率特性数学模型。文献[7]将风力发电机中发电机转子的动能用于在突发事故中支持电力系统频率,分析了在最大功率点下运行的频率特性和频率暂态支持能力。文献[8]介绍了西北电网测试光伏电站参与快速频率响应的控制方案,结合2016年的西北电网频率特性测试,实时分析了光伏发电的快速频率响应能力,结果表明,光伏电站可以参与电网的快速频率响应,其响应特性与常规一次调频相似。文献[9]建立了考虑电压源光伏系统局部自适应动态下垂控制机制的光伏微电网集群详细小信号模型,并通过使用完整的动态模型来比较和分析单个微电网和互连微电网的动态特性。文献[10]建立了一个包含逆变器、负载和线路拓扑在内的微电网小信号状态空间模型,通过特征值分析了逆变器关键参数对负荷变化冲击下系统频率响应过程的影响。综上,随着分布式电源参与调频需求的提升,其频率特性及其对系统的影响获得了业内研究人员的持续关注。但上述研究仅对单一类型分布式电源特性开展了频率特性分析,对系统内部不同类型发电单元的并列运行特性并未进行研究。
随着可再生能源参与调频比例的增加,其与并列运行传统机组的协调问题逐渐引起学者注意,文献[11]在研究风电机组与同步发电机的出力配合时指出,当风机调频能力有限时,如果在下垂控制环节中增加惯性环节,将改善系统整体的频率响应特性,但并未给出风电机组与同步机组之间的协调策略。文献[12]针对逆变器类电源与同步机类电源之间暂态功率分配不均问题,提出了一种基于分散自适应下垂控制的并联逆变器有功功率分配方法,并针对提高系统暂态性能的问题,提出了一种鲁棒控制器。文献[13]提出了一种用于光伏发电系统的并网控制方案,该方案通过在最大功率点以下运行来保持有功储备,以应对暂态过载问题。文献[14]提出了一种能够为光伏并网逆变器提供最大功率点估计和有功储备调节的控制方案,该方案可在不同条件下提供可调节的动态储备水平,以应对暂态期间功率分配不均导致的过载问题。文献[15]通过在逆变器有功-频率下垂控制回路增加超前-滞后控制环节,防止逆变器暂态过载,但此方法在减小超调量的同时降低了收敛速度,增加了收敛时间。上述研究虽然涉及到了逆变器类可再生能源机组和传统同步机类机组的并列运行协调问题,但主要侧重于对逆变器类电源的暂态过载问题进行研究,未对引发暂态功率分配不均的根本原因——频率特性差异进行深入讨论,并提出解决方案。
为解决参与调频的逆变器类电源和传统同步机类电源并列运行的动、静态功率分配问题,提升其并列运行品质和安全性。本文首先对微电网内参与调频的传统同步机类电源和逆变器类电源进行频率特性分析,明确造成两类电源频率特性差异的根本原因;在此基础上,基于虚拟同步机(virtual synchronous generator, VSG)技术和经典控制理论,通过增加逆变器类电源的惯性和虚拟调速器惯性,对逆变器类电源的频率特性进行重塑,实现逆变器类电源频率特性的同步机化,改善同步发电机类电源和逆变器类电源并列运行系统的动、静态品质,并提升系统运行的经济性和可靠性。
1 分布式电源频率特性分析
微电网是一个小型电力系统,其典型结构如图1所示,微电网内部高比例可再生能源参与调频后,与传统机组合力承担系统调频任务,不同类型分布式电源的频率特性分析是研究暂态和稳态功率分配问题的重要基础。

图1 微电网系统典型结构Fig.1 Typical structure of microgrid system
1.1 同步机类电源频率特性分析
依据电力系统方面的经典文献,以传统火电机组为代表的同步机类电源频率响应模型框图如图2所示[16-17]。

图2 传统同步机类电源频率响应模型Fig.2 Frequency response model of a synchronous generator-based DG
图2中,TG代表调速器惯性时间常数;R表示调差系数;ΔPL为有功负荷增量;ΔPm为发电机组机械功率增量;M为同步发电机转子惯性时间常数;D为阻尼系数,代表负荷的频率响应系数;Δω为频率偏差。当系统负荷发生变化后,转子的机械转矩与电磁转矩将会出现不平衡现象,导致发电机转子转速发生变化,即系统频率发生变化。在此过程中以同步发电机的转子运动方程为:
(1)
Δω=ωG-ωn
(2)
式中:JG表示发电机转子转动惯量;ωG、ωn分别表示转子实际转速以及额定转速;Pm、Pe分别表示发电机机械功率和电磁功率。负荷发生变化后,转子转速发生变化。一旦测得的转子转速偏差(即系统频率偏差)超过某个阈值时,就会激活同步发电机组的调速系统,增加来自原动机的机械功率,抑制频率下降,该过程称为一次调频响应,数学表达式为:
(3)
结合式(1)—(3),同时考虑发电机组的旋转备用以及负荷的频率响应特性,令KG=1/R,则可以推导出传统同步机类电源频率响应的传递函数Gs(s)。
(4)
同时,在负荷变化时,发电机转子可以通过加速或减速来交换机械转子自身动能,在负荷变化的初始时刻提供一个惯量支撑功率,转子动能的变化ΔEG为:
(5)
式中:ΔEG代表同步发电机转子动能变化量;t0表示负荷变化的时刻。
1.2 逆变器类电源频率特性分析
当可再生能源发电以最大功率追踪(maximum power point tracking,MPPT)运行模式接入电网时,并不能响应系统频率变化。通过减载运行[18]或直接利用储能系统[19]等技术手段可使可再生能源具备参与调频的能力,其中下垂控制是传统可再生能源参与调频普遍采用的控制策略。
通过下垂控制策略控制可再生能源接口逆变器,可以使逆变器类电源模拟出传统发电机组的外特性。由于逆变器类电源不具备同步机类电源那样的发电机机械转子和调速器等机械结构,几乎没有惯性,其频率响应过程是一个近乎无惯性的动态过程,其频率响应模型的传递函数为:
(6)
式中:Δp为输出功率变化量;m为下垂系数。
1.3 仿真实验验证与分析
从上述频率特性分析可知,传统同步机类电源与采用典型下垂控制的逆变器类电源的频率特性在数学模型上存在较大差异。为进一步明确其差异造成的影响,本文先通过仿真实验对两类电源在受到扰动时的实际响应过程进行模拟,并对两类机组之间在动态过程中的相互作用及暂态功率分配过程进行深入分析。
依据文献[20],在图1所示的包含2种分布式电源的孤岛微电网模型上来研究采用下垂控制的逆变器类电源与同步机类电源在负荷变化后并列运行的动态行为。系统电源总容量为160 kW,包括采用下垂控制的逆变器类电源DG1和传统同步机类电源DG2,容量均为80 kW。Z1和Z2表示2个DG连接到母线的线路阻抗。模型具体参数如表1所示。

表1 模型具体参数Table 1 Specific parameters of the model
在t=6 s前,系统带40 kW的负荷稳定运行,2个分布式电源分别负担50%负荷(20 kW)。t=6 s时,将负荷2(80 kW)接入系统,2个分布式电源出力仿真结果如图3所示。图3中,2个分布式电源输出功率都以80 kW为基准值进行标幺表示。
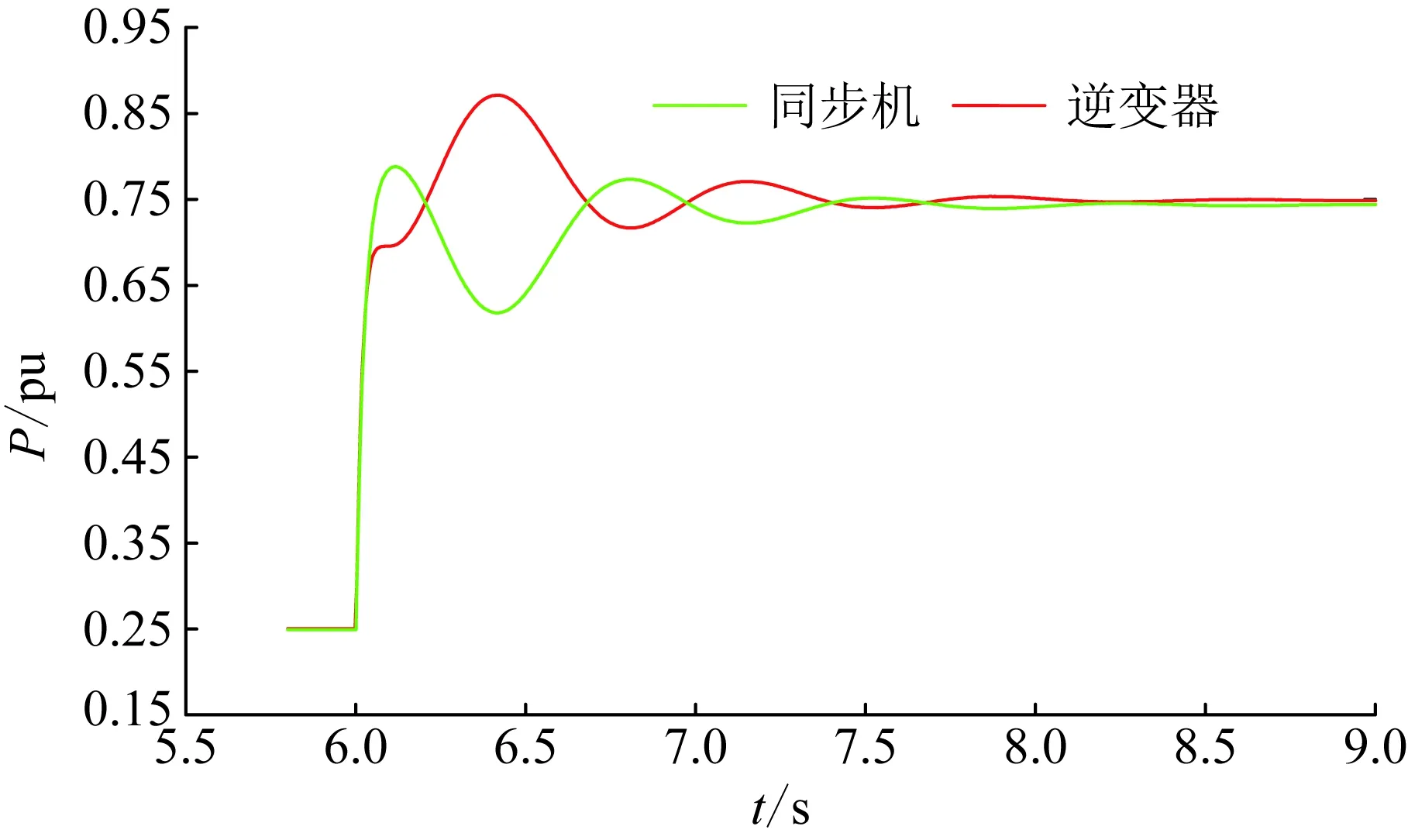
图3 电源暂态输出功率Fig.3 Transient output power of two generators
由图3所示的仿真结果可知,在负荷变化的初始瞬间,传统同步机类电源具备惯量支撑能力,首先负担了大部分的负荷增量;逆变器类电源随后也做出了快速响应,出现了两类电源出力的推拉过程,最终趋于稳定。由1.1节理论分析可知,传统同步机类电源的初始响应是由式(3)中机组具备的旋转惯性决定的,反映了传统同步机类电源动态的频率支撑能力;同时,根据1.2节分析,逆变器类电源具有极快的输出响应能力,其通过一次调频下垂特性快速增加了有功出力。显然,随后的两类电源出力推拉过程是由于两类电源频率特性不匹配造成的。
考虑特殊情况下,在系统负荷较重时,负荷变化后机组接近满载运行,暂态功率分配不均还可能引发过载保护动作,不排除逆变器由于迅速增加出力导致逆变器暂态过载,引发过载保护,导致机组解列,继而引发连锁反应导致系统内其他机组也解列。假设t=6 s前系统负荷为80 kW,2个分布式电源分别负担50%负荷(40 kW)。t=6 s时,将负荷2(80 kW)接入系统,2个分布式电源出力仿真结果如图4所示。
逆变器类电源通常过载能力较弱,在特殊工况下(负荷2的接入使系统满载运行),由于参数设置问题,DG1在动态调整过程中,其快速响应过程的超调引发了过载保护,使其脱网。随后将引发连锁反应导致系统内其他机组的解列。t=6 s时,负荷2的接入使DG1过载解列,最终也导致了DG2的过载脱网,整个系统瓦解。
通过以上理论分析和仿真结果来看,两类电源的频率特性存在较大的差异,在系统受扰时并列运行的两类电源在动态过程中存在较严重的不匹配情况,并可能引发严重的系统事故。

图4 机组由于暂态过载导致解列Fig.4 Generator disconnection due to transient overload
2 基于VSG技术的频率特性重塑
由第1节理论分析和仿真结果来看,同步机类电源和逆变器类电源频率特性具有较大的差异,在动态过程中会造成并列运行单元之间的功率吞吐,极端工况下可能造成系统崩溃。采用虚拟同步机技术控制的逆变器类电源可实现传统同步机类似的调频、调压功能,本文基于虚拟同步机技术对逆变器类发电单元特性进行重塑,实现两类电源并列运行的匹配。
2.1 同步机类电源与逆变器类电源的频率特性差异
在上述频率响应过程分析和仿真实验的基础上,通过对比分析可以知道,微电网内逆变器类电源和同步机类电源各有以下特点:
1)同步机类电源通过同步发电机接入电网,在负荷变化时可以提供惯量支撑功率,释放转子动能,阻止频率变化。而逆变器类电源通过电力电子逆变器接入电网,不具有发电机转子等机械结构,不具备转子惯性,也不能提供惯量支撑功率。
2)由于同步机类电源受转子惯性限制,其转速(输出频率)无法突变,变化较为缓慢。而可再生能源发电在逆变器控制器的作用下,其输出频率可以根据系统负荷变化快速调节,改变逆变器的输出功率。
3)负荷变化后,发电单元会通过一次调频改变有功功率给定值。传统同步机类电源由于调速器惯性,有功功率无法突变;而逆变器类电源采用下垂控制,可以迅速改变有功功率给定值,并增加出力。
2.2 基于传统VSG的频率特性重塑
逆变器类电源由于不具备机械转子,无法提供惯量支撑功率,这是逆变器类电源与同步机类电源在频率特性上的显著差异。VSG技术通过引入虚拟惯量来模拟同步发电机转子的运动,使逆变器类电源在负荷变化时也能提供惯量支撑功率。图5为VSG控制的逆变器类电源采用的主电路和控制结构[21]。在图5中,Uabc和Iabc分别为分布式电源输出的三相电压和电流;Pe和Qe分别为分布式电源输出的有功功率和无功功率。

图5 VSG控制框图Fig.5 Control block diagram of VSG
图5中,有功-频率控制环节的输入是有功功率参考值Pref和电源输出有功功率Pe,输出为角频率ω,该环节起到一次调频和模拟同步发电机惯量和阻尼的作用。VSG通过模拟同步发电机的转子运动方程来模拟同步机的惯量和阻尼,图6为VSG转子运动控制框图。
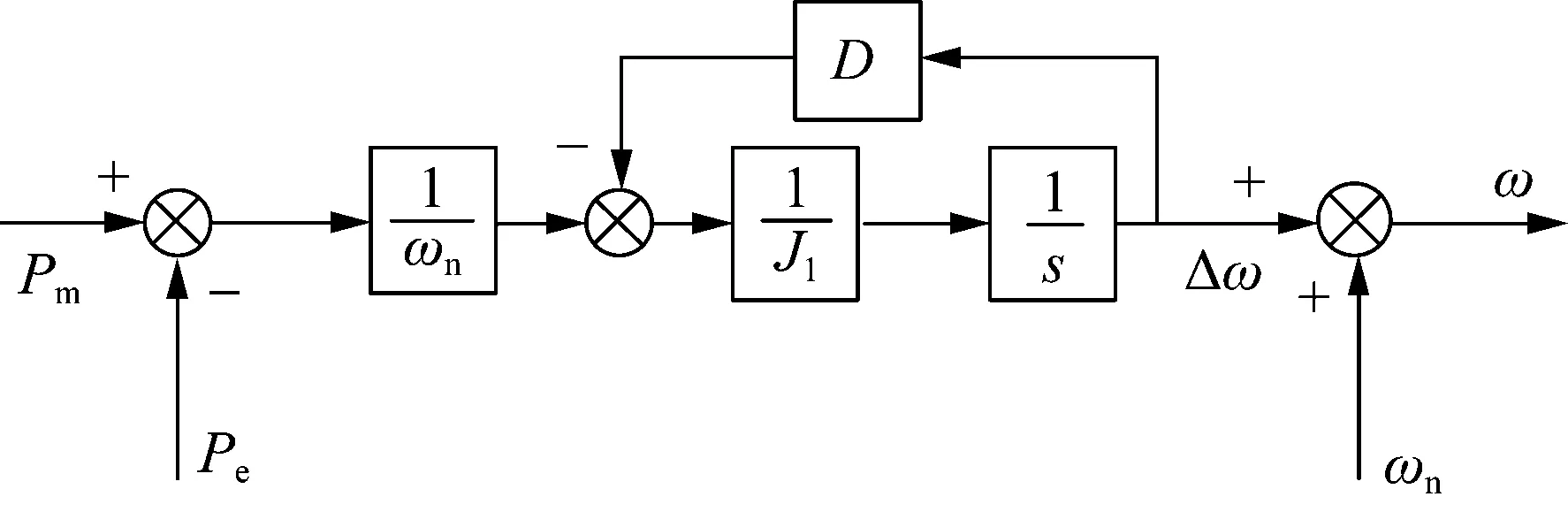
图6 VSG 转子运动方程控制框图Fig.6 Control block diagram of VSG rotor motion
由图6可得,VSG虚拟转子的运动方程表达式为:
(7)
式中:J1为VSG虚拟的转动惯量;ω为VSG实际输出角频率;PD为阻尼功率,其表达式如式(8)所示。
PD=Dωn(ω-ωn)
(8)
式中:D为阻尼系数。当阻尼系数为0或者其作用可以忽略不计时,式(7)可以写成:
(9)
式(9)为忽略阻尼系数时,VSG模拟同步机转子运动方程的表达式。Pm为机械功率,由于惯性的存在,其变化较为缓慢,可以近似为不变。由式(9)可知,当负荷变化时,虚拟惯量J1决定了系统频率的变化程度,即J1越大,惯量支撑能力越强。为了进一步明确VSG惯量支撑功率的表达,将VSG转子的动能方程写为:
(10)
式中:EG为VSG虚拟转子包含的动能。当负荷发生变化时,引起转子转速变化时,转子的动能变化为:
(11)
式中:PJ为VSG虚拟转子在负荷变化时提供的惯量支撑功率。将式(9)代入式(11),可得PJ的小信号表达式,如式(12)所示。
(12)
如式(12)所示,惯量系数J1越大,单位时间内惯量支撑功率变化量PJ越少,VSG的惯量支撑能力就越强。
综合上述分析,通过VSG技术将虚拟惯量引入到逆变器的控制中,使逆变器类电源具备了与传统同步机类电源一样提供惯量支撑功率的能力,减小了和同步机类电源频率特性的差异。
为验证传统VSG控制提供的惯量支撑功率的有效性,本文延续图2所示的仿真结构,将逆变器类电源改为传统VSG控制,VSG控制参数为J1=4 J/(N·m),阻尼系数D=0,其他参数如表1所示。在t=6 s前,系统带40 kW的负荷稳定运行,2个分布式电源分别负担50%负荷(20 kW)。t=6 s时,负荷2(80 kW)接入。仿真结果如图7所示,电源输出功率以80 kW为基准值进行标幺表示。

图7 传统VSG控制电源输出功率Fig.7 Output power with traditional VSG control methods
从图7可以看出,采用传统VSG控制技术模拟发电机转子的转动惯量,与改进前的图3相比,逆变器类电源在负荷变化初始时提供的惯量支撑能力得到了有效提升。但逆变器类电源与同步机类电源并列时仍存在较大不匹配过渡过程,逆变器类电源在后续的暂态过程中依旧存在抢功现象,引发并列发电单元之间的有功吞吐。根据2.1节的分析结论,并结合同步发电机调速器特性分析,这是由于通过一次调频改变有功功率给定值时,传统同步机类电源由于调速器惯性,有功功率给定值无法突变,而逆变器类电源采用的传统VSG控制并未考虑到传统同步机类电源的调速器惯性。
2.3 传统VSG技术的局限性及其改进
传统VSG控制并未考虑到传统同步机类电源的调速器惯性,这导致逆变器类电源与同步机类电源并列时仍会存在较大的不匹配过渡过程。逆变器类电源在暂态过程依旧会出现抢功现象,引发并列发电单元之间的有功吞吐。但是现有的研究者尚未对VSG增加调速器惯性这一问题展开研究和探讨。
为了克服由于同步机类电源调速器惯性带来的不利影响,本文在VSG的转速偏差反馈支路上引入一个一阶惯性环节,模拟传统同步机类电源的调速器惯性。改进后的VSG有功-频率控制框图如图8所示。

图8 改进型VSG有功-频率控制框图Fig.8 Block diagram of active power-frequency control of improved VSG
图8中,T1表示VSG虚拟的调速器惯性时间常数,用来模拟同步机类电源的调速器惯性。当负荷变化后,机械转矩和电磁转矩出现不平衡,VSG的转子运动方程如式(7)所示,同时VSG虚拟转子开始释放动能作为惯量支撑功率。随后通过频率偏差反馈支路实现同步机类电源调速器的一次调频功能,在该反馈支路上增加一阶惯性环节模拟调速器惯性。改进后的VSG频率响应传递函数为:

(13)
从式(13)可以看出,当T1为0时,即传统VSG技术不考虑调速器惯性时,整个逆变器类电源的频率响应模型为一阶系统的数学模型。与同步机类电源的频率响应传递函数式(4)相比,在数学表达上依旧存在较大差别。这也导致了图7中出现的逆变器类电源与同步机类电源并列时仍存在较大不匹配过渡过程,逆变器类电源在后续的暂态过程中依旧存在抢功现象,引发并列发电单元之间的有功吞吐。
考虑调速器惯性,即T1大于0时,整个逆变器类电源频率响应传递函数式(13)为二阶系统的数学模型,明显减小了逆变器类电源与同步机类电源的频率特性差异。增加调速器惯性时间常数T1可以有效避免由于逆变器有功给定改变过快造成的抢功问题。
3 仿真分析
为了验证所提频率特性重塑的有效性,本文在图2所示微电网模型上进行仿真实验。
3.1 VSG重塑技术的有效性
为了更清晰地得到结论,本文设计了一组对比试验。首先对基于传统下垂控制的逆变器类电源与传统同步机类电源的并列运行进行了仿真;然后对逆变器类电源进行了特性重塑,并重复了上述仿真过程。虚拟同步机及各重塑参数为:J1=4 J/(N·m),D=0,T1=0.2 s。
仍假定在t=6 s前,系统带40 kW的负荷稳定运行,2个分布式电源分别负担50%负荷(20 kW)。t=6 s时,负荷2(80 kW)接入,重塑前及重塑后并列运行系统响应仿真结果如图9所示。有功功率以80 kW为基准值进行标幺表示。
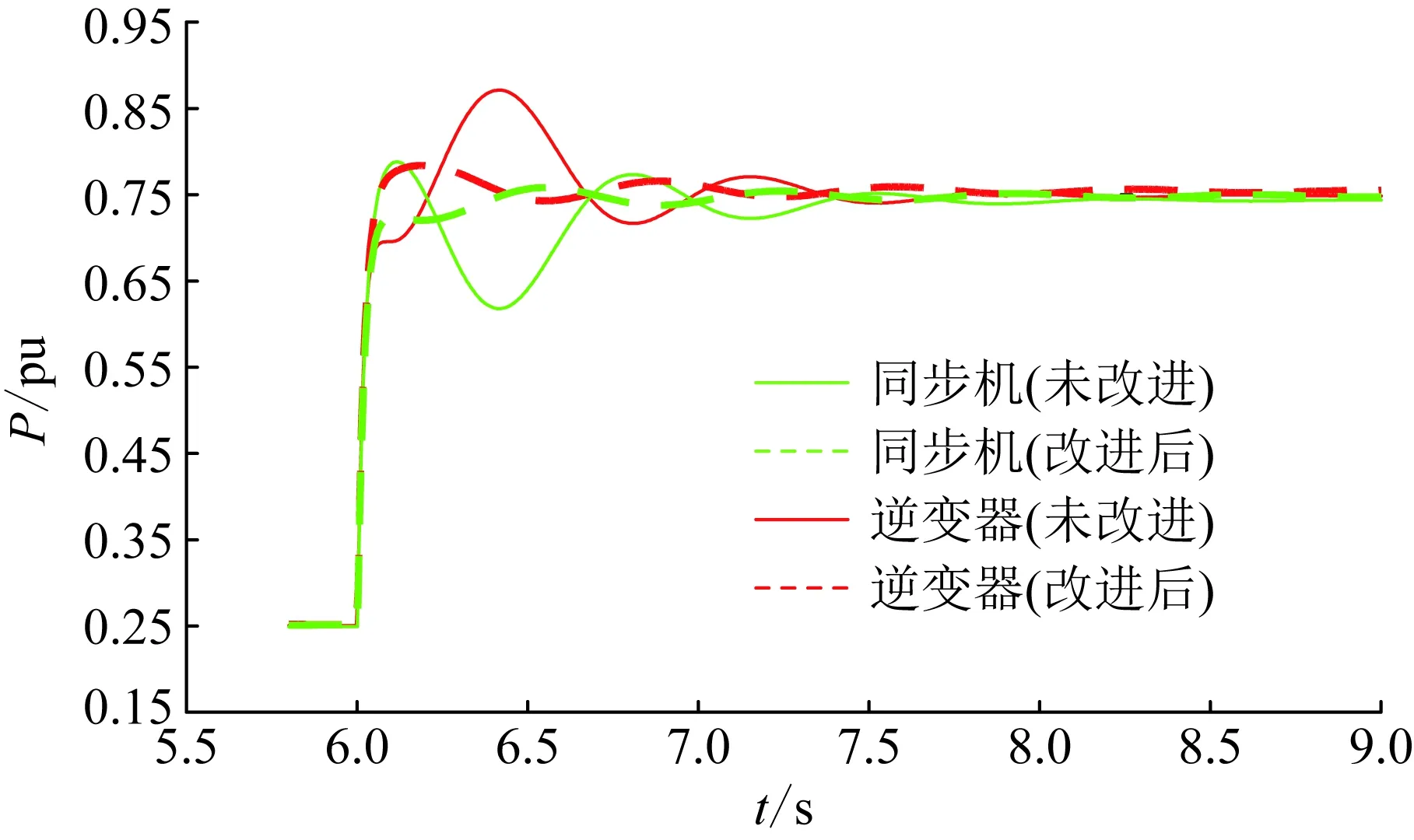
图9 不同控制方式下暂态输出功率Fig.9 Transient output power with different control methods
由图9仿真结果可知,传统下垂控制下的逆变器类电源在与传统同步机类电源并列运行时,由于两类电源频率特性的差异,其在外部负荷扰动下,机组之间的功率在暂态过程中吞吐明显,在t=6.5 s时出现明显的峰值,随后波动下降,在t=7.5 s时趋于平稳。对逆变器类电源通过VSG技术增加虚拟惯性和调速器惯性进行频率特性重塑后,其在外部负荷扰动下,机组之间的功率分配在暂态过程中得到明显改善,整个过渡过程没有明显的峰值,过渡过程平稳,并列运行特性得到较大改善。
3.2 不同J1取值对惯量支撑功率的影响
根据2.2节分析可知,VSG转动惯量J1对负荷变化时候的转动惯量支撑功率影响很大,为进一步分析转动惯量对并列运行特性的影响,本文VSG转动惯量J1对系统影响进行了仿真实验。
仿真实验工况不变,仅改变J1的取值。在t=6 s时,负荷2(80 kW)接入系统,J1取不同值时逆变器类电源有功功率响应如图10所示,仿真结果以80 kW为基准值进行标幺表示。

图10 J1取不同值时逆变器暂态输出功率Fig.10 Transient output power of the inverter when J1 takes different values
由仿真结果来看,基于VSG技术的特性重塑,让逆变器类电源可以在负荷变化的初始时刻提供一个惯量支撑功率,且转动惯量越大,初始时刻的支撑效果越明显。但虚拟惯量J1过大或者过小对并列运行的两类电源后续的过渡过程会造成较大影响,造成严重的有功振荡。选择适宜的参数可以有效兼顾动态功率支撑和并列运行过渡过程的平稳性。VSG惯性J1的选取主要考虑同步机类电源转子惯性的大小,与其相匹配,避免两类电源频率特性差异过大。
3.3 不同T1取值对暂态输出功率的影响
根据2.3节分析,特性重塑参数T1对并列运行系统特性也有较大影响,为进一步分析参数T1对并列运行特性的影响,本文对虚拟调速器惯性时间常数T1对系统影响进行了仿真实验。
仿真实验工况不变,仅改变T1的取值。在t=6 s时,负荷2(80 kW)接入系统,T1取不同值时逆变器类电源的有功功率响应如图11所示,仿真结果以80 kW为基准值进行标幺表示。
由仿真结果来看,虚拟调速器惯性时间常数T1对并列运行的两类电源过渡过程的影响较大,当T1过小或过大时,导致逆变器类电源改变有功给定值过快或过慢,都会导致逆变器类电源与同步机类电源暂
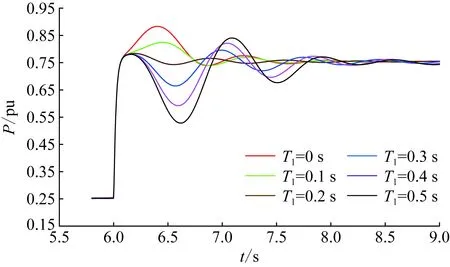
图11 T1取不同值时逆变器暂态输出功率Fig.11 Transient output power of the inverter when T1 takes different values
态功率分配不均。因此T1的取值不能过大或过小,应与同步机类电源的调速器惯性相匹配。适宜的参数选取是两类电源并列运行过渡过程优化的重要条件。
4 结 论
本文针对两类参与调频的分布式发电单元特性差异进行了理论和仿真分析,并在此基础上,基于虚拟同步机技术对逆变器类电源频率特性进行了重塑,通过理论分析和实际运行工况仿真验证,得到如下结论:
1)参与调频的同步机类电源具有一定的惯量支撑能力,其能力取决于同步机的惯量;而逆变器类电源在初始时刻的支撑能力较弱。
2)同步机类电源和逆变器类电源频率特性具有较大的差异,在动态过程中会造成并列运行单元之间的功率吞吐;极端工况下可能造成系统崩溃事故。
3)利用虚拟同步发电机技术可以实现逆变器类发电单元频率特性的重塑,并可极大地改善两类电源并列运行特性,有利于系统经济、可靠运行。
猜你喜欢
电力自动化设备(2022年8期)2022-08-09
电气电子教学学报(2022年2期)2022-05-23
现代电力(2022年2期)2022-05-23
湖南电力(2021年4期)2021-11-05
能源工程(2021年2期)2021-07-21
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程(2019年4期)2019-05-07
数码设计(2018年2期)2018-12-26
电子制作(2018年14期)2018-08-21
