
飞翼模型纵向气动特性等离子体流动控制试验
2022-02-17 03:42牛中国许相辉王建锋蒋甲利梁华
物理学报 2022年2期
牛中国 许相辉 王建锋 蒋甲利 梁华
1) (中国航空工业空气动力研究院,低速高雷诺数航空重点实验室,哈尔滨 150001)
2) (空军工程大学航空航天工程学院,西安 710038)
为了改善大展弦比飞翼模型纵向操纵性和稳定性,在低速风洞中开展了等离子体流动控制技术的试验研究.采用粒子图像测速技术获取了等离子体对翼面流场的影响.采用静态测力技术获取了等离子体对模型气动力和升降舵舵效的影响.采用虚拟飞行试验技术获取了等离子体对俯仰角和俯仰角速度时间历程的影响.通过对粒子图像测速和测力试验结果的分析表明,等离子体能够抑制翼面流动分离,阻止气动中心前移,改善模型的大迎角纵向气动特性.通过分析不同舵偏角的测力数据,来流风速V=50 m/s时等离子体能够改善飞翼模型大迎角的升降舵舵效,在不同舵偏角时均使模型的最大升力系数提高约0.1、失速迎角推迟4°以上.通过分析虚拟飞行试验结果,等离子体能够将模型的临界俯仰角提高3.6°,能够改善飞翼模型的纵向飞行稳定性和操纵性.
1 引言
飞翼布局飞行器取消了平尾和立尾,消除了翼面间的不利干扰,从而大幅提升了隐身性和气动效率,其优异的战场生存能力和突防能力使之受到世界各国的高度重视[1].飞翼布局在带来隐身和气动效率优势的同时,也给飞行操纵性和飞行稳定性带来巨大挑战.由于没有平尾,纵向操纵面分布在机翼后缘,导致纵向操纵力臂大幅缩短,纵向操纵效率降低;机翼后部附面层较厚,在大迎角时还会出现流动分离,进一步降低了纵向操纵性和安定性[2,3].受总体布局、结构传力、舵面面积等布局固有特性的限制,采用传统的机械舵面很难改善其纵向操稳特性.在传统常规气动布局设计技术受到束缚的背景下,采用主动流动控制技术改善其纵向操稳特性成为一种新的设计理念.进入新世纪以来,介质阻挡放电(dielectric barrier discharge,DBD)等离子体所需的电子元器件小型化和集成化发展迅速,等离子体流动控制能力逐渐由机理性研究发展到应用性研究[4],目前其设备基础和技术能力使它在改善飞翼布局纵向操纵性方面成为新的研究方向.
DBD等离子体流动控制技术是一种基于空气放电的新概念主动流动控制技术,它具有结构简单、重量轻、无运动部件、能耗低、响应快、频带宽、系统兼容性好、流动控制效果显著等突出优点,能够抑制大迎角时翼面的流动分离,起到增升、推迟失速的作用,且能够根据流动状态和需求有选择的施加控制,实现闭环控制[4].
DBD等离子体激励器布局如图1所示,它由暴露电极、预埋电极、绝缘介质和高压励电源等部分组成[5].在高压电场的作用下,暴露电极周围的空气发生电离,产生等离子体[6].当激励信号为毫秒量级(正弦波半周期或脉冲信号脉冲宽)时,诱导气流产生连续的射流[7],射流速度最大约为2—3 m/s;当激励信号为微秒/纳秒脉冲时,射流速度低于1 m/s,作用机制不再依赖动量输运,主要以焦耳热的形式作用流场,在极短时间内使暴露电极周围的气流突然加热,产生非定常微尺度激波扰动(如图2所示),扰动改变了流场的初始结构,抑制了附面层横向流的发展,同时也促进了内外流动的掺混[5,7−9].两种激励原理,微秒/纳秒脉冲激励适用的流场速度范围大、能耗低;而微秒和纳秒脉冲激励相比,微秒脉冲激励的脉冲上升沿和下降沿均远高于纳秒脉冲激励,所产生的电磁辐射较低,对航电仪器、设备的干扰小,便于实现工程应用.基于这两方面,本文选用了微秒脉冲的激励方式.
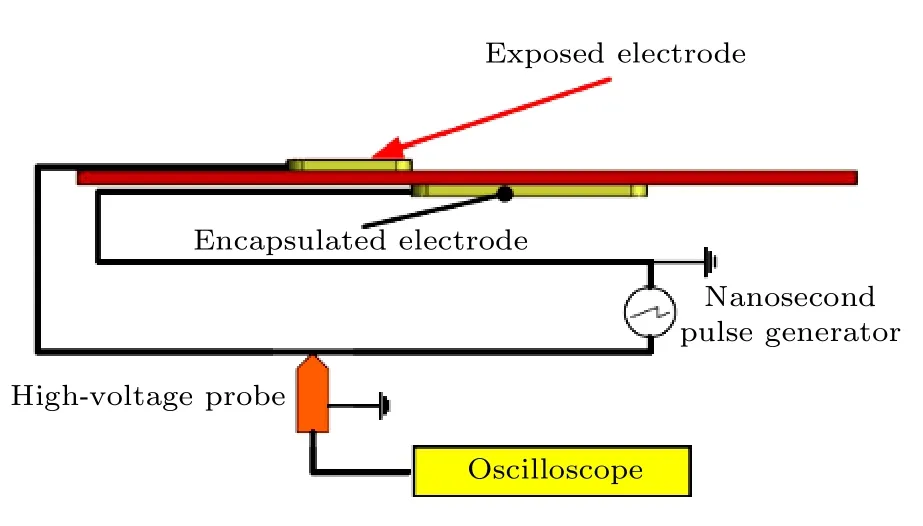
图1 等离子体激励器结构示意图[6]Fig.1.Schematic diagram of a DBD actuator[6].

图2 等离子体微尺度激波扰动纹影图[5]Fig.2.Micro-shock wave schlieren images[5].
国内外在等离子体流动控制领域开展了很多卓有成效的研究工作,促进了等离子体流动控制技术和其工程应用的发展.Thomas等[10]研究了等离子体激励器材料、几何参数和放电参数等对体积力的影响,并指出采用较厚低介电常数的激励器在更高电压下不会因形成丝状放电而额外损失能量.Xie等[11]采用纹影和粒子图像测速技术(particle image velocimetry,PIV)研究了脉冲对激励器放电影响,研究表明短脉冲上升沿会产生高电流峰值而使局部加热,产生了圆弧波和平面波,当上升时间减小时,圆弧波的强度增大,垂直方向上波传播距离以准线性方式增加.Yadalaa等[12]采用喷涂工艺制作了超薄等离子体激励器,电极为几微米厚的银膜,介电材料为500 µm厚的聚对苯二甲酸乙二醇酯(PET)薄膜,采用该激励器使45°后掠翼简化模型的转捩位置最大推迟了4.5%平均气动弦长.Duong等[13]与Corke和Thomas[14]使用等离子体控制将平板湍流边界层的黏性阻力减小了70%.Akansu等[15]与Correale和Huang[16]开展了圆柱尾迹的等离子体流动控制技术研究,并实现了尾迹分离的闭环控制.文献[17−21]分别在后台阶和二维翼型上开展了等离子体流动控制技术的研究,并指出等离子体无量纲减缩频率(F+=ρvL/µ,L为等离子体激励在翼面上的影响尺度)对抑制流动分离具有重要作用,当F+=0—1时失速控制效果较好.在飞翼和三角翼模型上,Kaparos等[22],Keisar等[23],Patel等[24],Matsuno等[25]以及Kwak和Nelson[26]分别在风洞试验中采用等离子体控制抑制翼面流动分离和前缘涡破裂,并指出等离子体控制能够改善飞翼布局的操纵性.Nelson等[27]通过1303飞翼模型上等离子体控制的自由滚转试验表明,等离子体控制具有改善飞翼模型横向操稳特性的作用,在大迎角下滚转控制能力优于后缘的操纵面.Grundmann等[28]和Friedrichs等[29]采用等离子体流动控制技术取代了验证机的副翼实现了飞行滚转控制,并提高了起降状态的升力,从而验证了等离子体控制技术在飞行器工程应用中的可行性.
目前,采用等离子体流动控制技术对飞翼布局横向控制方面的研究较多,但对飞翼布局纵向控制的研究较少,且研究使用的风洞试验模型尺度较小、试验雷诺数较低.作者在文献[30]中在展长为2.4 m的飞翼模型上开展了等离子体控制的试验研究,研究表明激励位置在前缘、放电频率为200 Hz、电压为10 kV时能取得较好的推迟失速、增升和改善俯仰力矩的综合控制效果,试验雷诺数达到260万,推进了等离子体控制的工程应用进程.
本文是文献[30]工作的延续,在该研究的基础上、在同一个飞翼模型上开展了等离子体改善其纵向气动特性的研究.首先通过PIV试验掌握了等离子体控制对翼面流场和模型纵向气动特性的影响规律;然后通过静态试验研究了等离子体控制对升降舵操纵特性的影响,最后通过虚拟飞行试验研究了等离子体控制对飞翼模型纵向稳定性和操纵性的改善作用.在风速V=50 m/s时,以模型平均气动弦长为参考长度的雷诺数为Re=1.86 × 106.
2 试验设备与方法
2.1 试验风洞和模型
试验研究在中国航空工业空气动力研究院FL-51风洞开展,该风洞是一座开/闭口试验段可更换的单回路、连续式风洞,本研究的所有试验选用闭口试验段(如图3所示),试验段截面为4.5 m ×3.5 m矩形,试验段长11 m,空风洞最大风速为100 m/s,试验段平均湍流度为0.10%.

图3 FL-51风洞闭口试验段Fig.3.The closure test of FL-51 wind tunnel.
试验模型为双“W”飞翼布局模型,平面形状如图4所示,在A,B和C三个剖面位置分别设置NACA64215,NACA65212和NACA65209层流翼型,模型展长为2.4 m,前缘后掠角为34.5°,平均气动弦长为0.55 m,参考面积为0.98 m2,展弦比为5.79.模型为玻璃钢结构,内部金属骨架与天平连接,外部玻璃钢用于粘贴等离子体激励器.在机翼后缘设计了四组操纵舵面,由翼梢至翼根依次为阻力方向舵δzld、外侧升降副翼δsjd1、中侧升降副翼δsjd2和内侧升降副翼δsjd3,进行纵向操纵时升降副翼同向偏转.
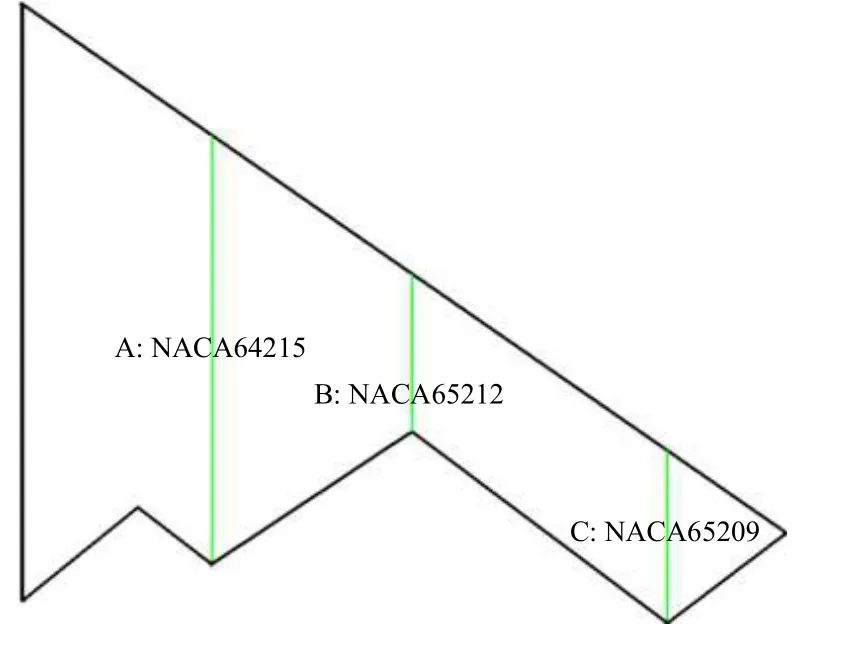
图4 飞翼平面形状示意图Fig.4.Schematic diagram of the plane shape of the fly wing.
等离子体激励器采用厚0.1 mm的聚酰亚胺薄膜作为绝缘介质,采用0.02 mm厚的铜箔作为放电电极,预埋电极宽为5 mm,暴露电极宽为2 mm.等离子体激励器布置在飞翼模型从机头到翼梢的前缘[30].
等离子体放电采用微秒脉冲放电形式,脉冲上升沿1 µs,半脉冲宽2 µs,放电频率200 Hz,放电电压为10 kV,等离子体电源安装在模型机身内,如图5所示.等离子体放电参数采用P6015A高压探针和DP04104示波器测量显示.

图5 等离子体电源和飞翼模型安装Fig.5.The installation of plasma power supply and flying wing model.
2.2 试验方法
2.2.1 风洞静态测力试验
风洞静态测力试验采用六分量杆式应变天平测力,模型采用单支杆腹部支撑,如图6所示,天平安装在模型内部,模型通过天平与腹部支杆连接.测力试验采用迎角连续变化法,使用VXI(VMEbus extension for instrumentation)数据采集系统每0.5°采集一次天平测力数据.试验结束后对数据进行滤波、筛选、处理,得到天平电信号数据,最后根据天平公式和模型参数计算得到气动力系数,其测力精度为0.17%.

图6 风洞试验段的等离子体控制飞翼模型Fig.6.The fly wing model with plasma control in the test section.
对测力试验结果进行了天平弹性角修正、风洞洞壁干扰修正、风洞轴向静压梯度修正、风洞气流偏角修正、支架干扰修正等,没有进行天平温度补偿修正和模型底阻修正,试验结果存在一定的误差,误差对升力和力矩的影响较小,不影响对试验结果的分析和使用.
2.2.2 风洞PIV试验
PIV试验采用Tomo-PIV试验系统,激光器为集成式双Nd:YAG激光器,单脉冲能量最大为500 mJ,激光波长为532 nm.CCD摄像机像素为16 M (4904 pixels × 3280 pixels),灰度分辨率为12 bit,图像采集频率为3.2帧/s.采用Davis 8.3软件进行PIV数据采集与处理.示踪粒子采用压力雾化法产生,粒子介质为橄榄油,示踪粒子直径约1 µm.
PIV试验系统主要用于测量飞翼模型顺气流方向的二维速度矢量场,研究等离子体控制对翼面流场流动分离的影响.图7所示为PIV试验设备布置结构图,激光器安装在风洞顶部的上转盘上,激光片光透过上转盘观察窗自上而下照射顺气流方向的测量剖面.相机布置在风洞侧面,相机轴线与片光平面垂直,拍摄顺气流方向的粒子图像.PIV试验共测量了两个剖面,如图8所示,分别距离模型纵向对称面480 mm (简称P1剖面)和770 mm (简称P2剖面).PIV速度场计算时,查询窗口选择“24 pixels × 24 pixels”,查询窗口重叠率为50%,每个查询窗口平均约有9个粒子,计算后对50组试验结果进行平均.P1剖面PIV测量面积约为700 mm × 470 mm,速度矢量点空间距离约为1.72 mm;P2剖面PIV测量面积约为597 mm ×400 mm,速度矢量点空间距离约为1.46 mm.

图7 粒子图像测速(PIV)试验设备布局图Fig.7.Schematic diagram of particle image velocimetry(PIV) test set-up.
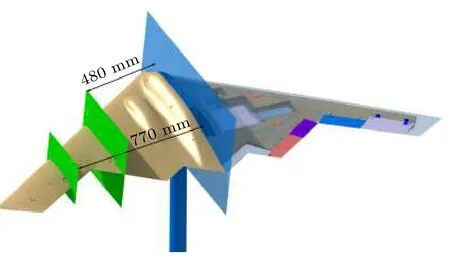
图8 PIV试验测量面位置图Fig.8.The location map of PIV test surface.
2.2.3 风洞虚拟飞行试验
风洞虚拟飞行试验(virtual flight testing)是在风洞中直接进行气动、运动、控制一体化研究试验技术,可实时获得飞翼模型等离子体控制的运动轨迹、姿态等飞行信息,达到探索气动/运动耦合机理的目的.
试验时,飞翼模型通过三自由度轴承支撑装置(如图9所示)与模型腹撑支杆相连,安装后如图5和图6所示.模型的三个角位移可以自由运动,也可以进行内部控制,或在定常或非定常空气动力作用下通过控制舵面实时改变模型姿态.虚拟飞行的飞控系统采用俄罗斯STA34飞行控制系统,该系统集自动控制、控制律构建、数据采集、半物理仿真四大功能于一体.进行纵向虚拟飞行试验研究时将滚转和偏航两个自由度固定,仅使俯仰方向自由,通过试验获得飞翼模型等离子体控制的俯仰角、俯仰角速度和俯仰操纵指令等的时间历程.
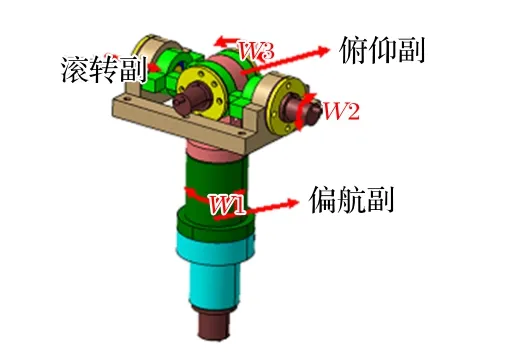
图9 三自由度轴承支撑装置Fig.9.Three degree of freedom bearing support device.
3 结果与讨论
3.1 等离子体流动控制特性研究
飞行器气动力的变化源于其绕流流场结构的改变,因此在开展纵向控制前先通过PIV试验研究了等离子体控制对飞翼翼面流场结构的影响.PIV试验时δsjd1=20°,δsjd2=20°,δsjd3=20°,δzld=0°,试验气流速度V=27 m/s.
P1和P2剖面不同迎角时施加和不施加等离子体控制的速度云图如图10—17所示,对应试验风速下的测力曲线如图18所示.当α=10°时,升力系数处于线性段,两个PIV测量剖面均为附着流(图10(a)和图11(a)),翼面流动未发生流动分离;施加等离子体控制后速度场(图10(b)和图11(b))和气动力系数均未发生明显变化,这说明等离子体控制对附着流动的影响较小.当α=12°时,升力系数处于非线性增长区,接近最大升力系数点,P1剖面中部附面层增厚(图12(a))、后部出现小尺度分离泡,P2剖面的翼面流动完全分离(图13(a)),机翼外翼的流动分离早于内翼;施加等离子体控制后,等离子体诱导的非定常激波扰动与吸力面气流相耦合,使P1和P2剖面流动完全附着翼面(图12(b)和图13(b)),两个剖面的分离泡和分离区消失,等离子体控制完全抑制了翼面流动分离,升力系数重新回归到线性增长.翼面流动分离的抑制阻止了气动中心的前移,消除了俯仰力矩系数的突然上仰,使俯仰力矩系数稳定发展,提高了飞翼模型的纵向静稳定性.当α=14°时,升力曲线处于深失速区,P1剖面和P2剖面均已出现大面积的流动分离(图14(a)和图15(a)),流动分离导致模型压差阻力急剧增大,表现为阻力系数曲线斜率突然增大;施加等离子体控制后,P1剖面翼面分离基本消失、流动重新附着翼面(图14(b)),P2剖面前部流动附着翼面、后部出现局部的流动分离区(图15(b)),其结果是升力系数曲线过渡到非线性增长阶段、阻力系数减小、气动中心前移并导致俯仰力矩曲线持续上仰,但上仰变得平缓.当α≥ 16°时,如图16和图17所示,等离子体控制不能完全抑制流动分离,但能使流动分离区减小,所以升力系数高于不施加等离子体控制的状态.从整个试验迎角范围看,等离子体控制推迟了模型失速,失速迎角推迟2°;延缓了分离区的发展,升力系数曲线非线性增长区间延长,最大升力系数提高了约8%;抑制了俯仰力矩的突然上仰,使俯仰力矩拐折点推迟3°.

图10 α=10°时P1剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.10.The velocity cloud map of PIV test on P1 at α=10°:(a) Plasma off;(b) plasma on.
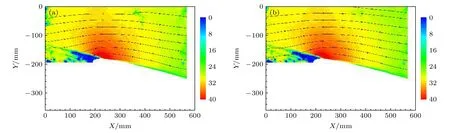
图11 α=10°时P2剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.11.The velocity cloud map of PIV test on P2 at α=10°:(a) Plasma off;(b) plasma on.
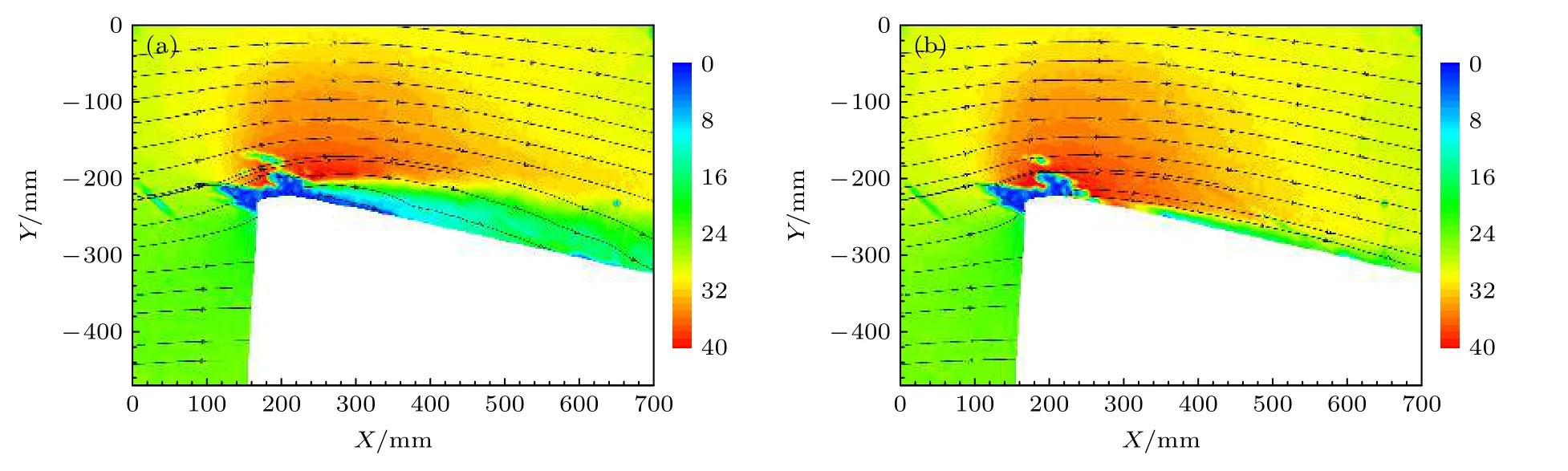
图12 α=12°时P1剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.12.The velocity cloud map of PIV test on P1 at α=12°:(a) Plasma off;(b) plasma on.

图13 α=12°时P2剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.13.The velocity cloud map of PIV test on P2 at α=12°:(a) Plasma off;(b) plasma on.
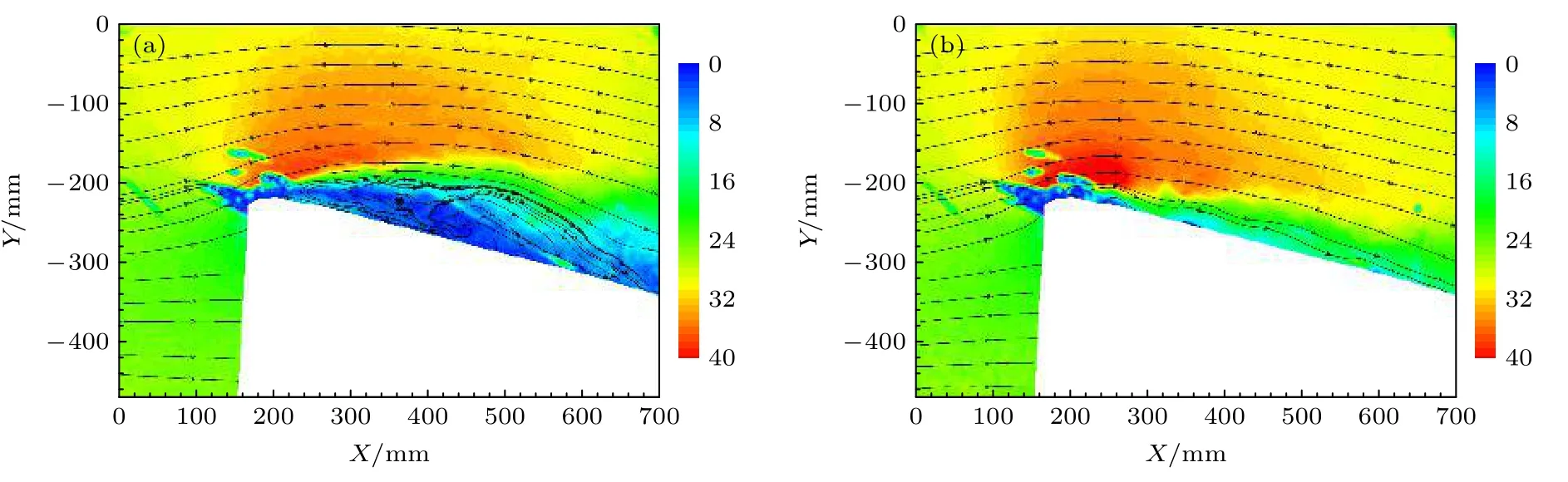
图14 α=14°时P1剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.14.The velocity cloud map of PIV test on P1 at α=14°:(a) Plasma off;(b) plasma on.

图15 α=14°时P2剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.15.The velocity cloud map of PIV test on P2 at α=14°:(a) Plasma off;(b) plasma on.

图16 α=16°时P1剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.16.The velocity cloud map of PIV test on P1 at α=16°:(a) Plasma off;(b) plasma on.

图17 α=18°时P1剖面PIV试验速度云图 (a)无等离子体;(b)有等离子体Fig.17.The velocity cloud map of PIV test on P1 at α=18°:(a) Plasma off;(b) plasma on.
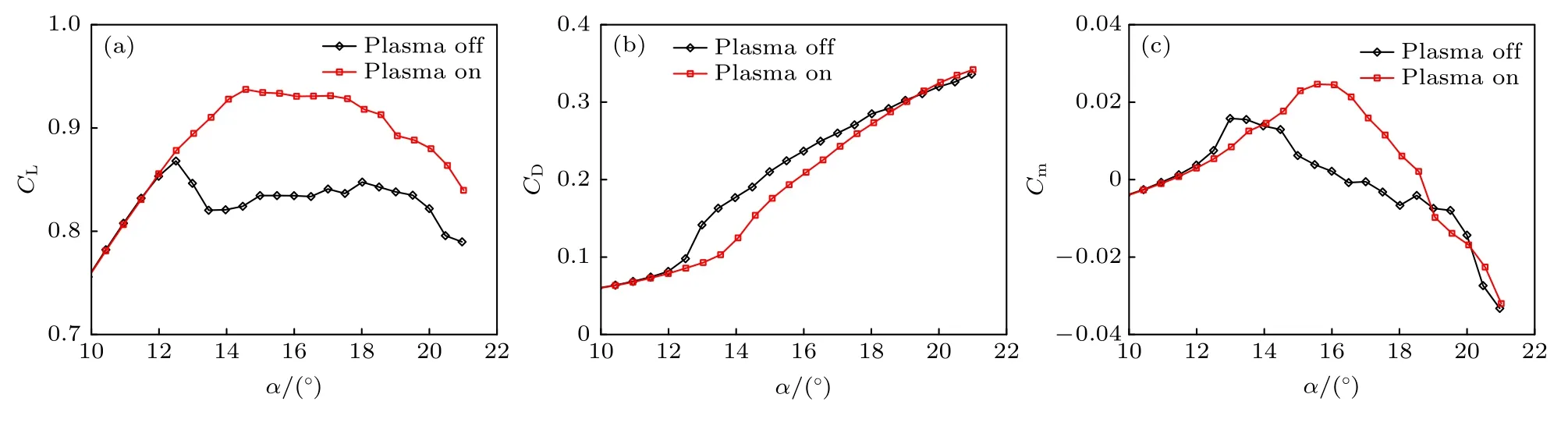
图18 V=27 m/s飞翼模型等离子体控制试验曲线 (a) 升力系数曲线;(b) 阻力系数曲线;(c) 俯仰力矩系数曲线Fig.18.The test curve of plasma flow control on flying wing at V=27 m/s:(a) Lift coefficient curves;(b) drag coefficient curves;(c) pitching moment coefficient curves.
3.2 飞翼模型等离子体控制静态测力试验
飞翼布局纵向配平和操纵主要依靠机翼后缘的组合升降副翼,本文规定升降副翼做升降舵使用时δsjd1,δsjd2和δsjd3同向偏转,舵面后缘下偏为正,研究等离子体控制对纵向静态特性影响时阻力舵δzld=0°.
V=50 m/s飞翼布局模型不同升降舵舵偏时等离子体控制的气动力试验曲线如图19所示.升力系数曲线随升降舵偏角的增大而向上平移;施加等离子体控制后,在不同舵偏角时等离子体控制均能显著改善飞翼布局的失速特性,使最大升力系数增加约0.1、失速推迟4°以上.俯仰力矩系数曲线随升降舵偏角的增大而向下平移;不同舵偏角下,等离子体控制均能延缓俯仰力矩系数曲线的突然上仰和拐折,使其线性增长区间延长,在深失速区因增加了机翼前缘升力而使低头力矩减小.升降舵舵偏对滚转和偏航力矩的影响较小;等离子体控制因改善了流动的不对称性而使滚转和偏航力矩的非线性偏离减弱,当α=20°时完全抑制了滚转和偏航力矩系数的发散.由以上分析可见,等离子体控制不仅能够改善飞翼模型大迎角状态的纵向力矩特性,同时还能改善模型大迎角状态的横航向力矩特性.

图19 V=50 m/s时不同升降舵舵偏时等离子体控制试验曲线 (a) 升力系数曲线;(b) 阻力系数曲线;(c) 俯仰力矩系数曲线;(d) 滚转力矩系数曲线;(e) 偏航力矩系数曲线;(f) 侧力系数曲线Fig.19.The plasma control test curve for different elevator deflection at V=50 m/s:(a) Lift coefficient curves;(b) drag coefficient curves;(c) pitching moment coefficient curves;(d) roll moment coefficient curves;(e) yaw moment coefficient curves;(f) lateral force coefficient.
飞翼模型升降舵舵效Cmδe随迎角α的变化曲线如图20所示.在迎角α=0°—12°范围内,受气动中心前移和后缘附面层增厚影响,升降舵舵效随迎角增大而逐渐降低,当迎角α>12°时,升降舵舵效曲线突然上仰,随后舵效跌荡起伏并迅速降低;施加等离子体控制后,当迎角α≤ 12°等离子体控制对升降舵舵效影响不大,而当迎角α>12°时,等离子体控制抑制了升降舵舵效曲线的突然上仰,使舵效回归线性变化,迎角继续增大时舵效的起伏波动减弱,当迎角α>16°时,升降舵舵效发展平稳,随迎角增大而迅速减小的趋势消失.由此可见,等离子体控制能够改善飞翼布局模型大迎角状态的静态纵向操纵性.

图20 飞翼布局模型升降舵舵效随迎角变化的曲线Fig.20.Elevator efficiency curves of flying wing model with angle of attack.
3.3 飞翼模型等离子体控制虚拟飞行试验
3.3.1 等离子体控制对纵向稳定性影响
在虚拟飞行试验中,先使模型稳定在迎角α=10°状态,然后通过虚拟飞行控制系统施加方波激励,模拟飞行过程中突然出现的纵向扰动运动.采用正方波激励产生抬头扰动;采用负方波激励产生低头扰动.
飞翼模型在方波指令下施加和不施加等离子体控制时俯仰角和俯仰角速度的时间历程曲线如图21所示.不施加等离子体控制时,初始俯仰角θ=10°,施加负向方波激励时,模型突然低头运动到俯仰角θ=–2°附近,当方波激励结束时,模型抬头并在俯仰角θ=7°—13°区间内振荡,经过12 s左右的振荡衰减后稳定在俯仰角θ=10°;施加正向方波激励时,模型抬头并在俯仰角θ=16°附近剧烈振荡,振荡的最大俯仰角超过θ=28°,正向方波激励结束时,模型低头并在俯仰角θ=5°—15°范围内振荡,经过15 s左右的振荡衰减,最终稳定在俯仰角θ=10°;俯仰角速度运动的时间历程与俯仰角相对应,在负向方波激励时俯仰角速度振幅较小,正向方波激励时俯仰角速度振幅较大.施加等离子体控制后,在初始俯仰角θ=10°时历程曲线变化较小,说明等离子体控制对飞行器的稳定飞行影响较小;当有正向方波激励时,模型抬头并在俯仰角θ=16°附近振荡,振荡的最大俯仰角约为θ=26°,最大振幅明显减小;当正向方波激励结束时,模型低头并在俯仰角θ=5°—15°范围内振荡,振荡衰减速度明显加快,经过约8 s左右的振荡衰减后模型稳定在初始俯仰角θ=10°;等离子体控制同样使俯仰角速度的振幅减小、振荡衰减速度加快.可见,等离子体控制能够起到降低飞翼模型纵向扰动运动振幅、加快扰动振荡衰减的作用,从而提高飞翼模型的纵向飞行稳定性.

图21 等离子体控制对飞翼模型纵向扰动运动的影响 (a) 不加等离子体控制俯仰角时间历程曲线;(b) 等离子体控制时俯仰角时间历程曲线;(c) 不加等离子体控制俯仰角速度时间历程;(d) 等离子体控制俯仰角速度时间历程Fig.21.The influence of plasma control on the longitudinal disturbance motion of flying wing model:(a) Time history curve of pitch angle without plasma control;(b) time history curve of pitch angle with plasma control;(c) time history curve of pitch angle velocity without plasma control;(d) time history curve of pitch angle velocity with plasma control.
3.3.2 等离子体控制对纵向操纵性影响
在虚拟飞行试验中,先使模型稳定在较小迎角状态,然后通过虚拟飞行控制系统使飞翼模型升降舵下偏,模拟飞行器纵向拉起的操纵过程.
飞翼模型在缓慢拉起施加和不施加等离子体控制时俯仰角和俯仰角速度的时间历程曲线如图22所示.不施加等离子体控制时,飞翼模型最初在俯仰角θ=–3°附近稳定飞行,此时俯仰角和俯仰角速度变化很小;当施加缓慢拉起指令时,模型跟随指令慢慢抬头,俯仰角逐渐增大,最初俯仰角和俯仰角速度的振荡都比较小;当俯仰角提高到θ=11.5°时,俯仰角和俯仰角速度开始振荡发散,振幅逐渐增大;当拉起指令结束后使模型回归初始俯仰角,此时模型在俯仰角θ=–7.5°—10°范围内振荡,俯仰角和俯仰角速度的振荡衰减时间约为15 s.施加等离子体控制后,模型初始状态和最初的拉起过程中,俯仰角和俯仰角速度变化平稳,模型一直拉起到θ=15.1°时俯仰角和俯仰角速度才开始振荡发散;当拉起指令结束后使模型回归初始俯仰角,模型在俯仰角θ=–5°—1°范围内振荡,振幅明显减小,振荡衰减时间也减少到8 s左右.由此可见,在缓慢拉起过程中,飞翼布局模型在θ=11.5°时失速,施加等离子体控制后,失速的俯仰角推迟到θ=15.1°;拉起结束后,等离子体控制减小了振荡振幅、提高了振荡衰减速度,使模型的跟随性变好.因此,等离子体控制能够改善飞翼模型的纵向操纵性.

图22 等离子体控制对飞翼模型纵向操纵控制的影响 (a)不加等离子体控制俯仰角时间历程曲线;(b) 等离子体控制时俯仰角时间历程曲线;(c)不加等离子体控制俯仰角速度时间历程;(d)等离子体控制俯仰角速度时间历程Fig.22.The influence of plasma control on the longitudinal control of flying wing model:(a) Time history curve of pitch angle without plasma control;(b) time history curve of pitch angle with plasma control;(c) time history curve of pitch angle velocity without plasma control;(d) time history curve of pitch angle velocity with plasma control.
4 结论
本文基于微秒脉冲激励DBD等离子体流动控制技术开展了改善飞翼模型纵向气动特性的风洞试验研究,文中给出了等离子体控制对飞翼模型翼面流场的作用效果,揭示了对气动力的影响机制,着重分析了等离子体控制对飞翼模型静态和动态飞行稳定性和操纵性的影响规律.主要结论有:
1)等离子体控制能有效抑制翼面的流动分离,起到推迟飞翼模型失速和改善俯仰力矩的作用;
2)等离子体控制能够改善飞翼模型大迎角状态下的升降舵舵效,提升模型的纵向静稳定性和操纵性,在不同舵偏角下均能使模型最大升力系数提高0.1左右、失速迎角推迟4°以上;
3)等离子体控制能够提高飞翼模型飞行时的指令跟随性,使临界俯仰角由11.5°提高到15.1°、纵向扰动的最大振荡振幅降低2°、振荡衰减时间由15 s减少到8 s,从而提高飞翼模型的纵向飞行稳定性和操纵性.
本文采用等离子体流动控制技术改善了大展弦比飞翼模型静态和动态的纵向气动特性,体现了到等离子体流动控制技术在提升飞翼布局纵向飞行品质方向的巨大应用潜力.下一步将在更高雷诺数下结合真实的飞翼布局飞行器开展等离子体流动控制技术的飞行试验研究.
感谢空军工程大学等离子体动力学重点实验室在本项研究过程中给予的帮助,感谢项目组在试验研究期间的辛苦工作.
猜你喜欢
汽车实用技术(2022年11期)2022-06-20
北京航空航天大学学报(2021年6期)2021-07-20
数码世界(2020年4期)2020-11-25
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年2期)2017-11-24
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年4期)2017-11-23
科技传播(2014年4期)2014-12-02
