
石墨烯柔性导电针织物双向传感性能
2022-02-16 06:33:00邵怡沁魏佳博宋倩倩王晓涵江静怡
纺织高校基础科学学报 2022年4期
邵怡沁,魏佳博,宋倩倩,2,王晓涵,2,江静怡
(1.浙江理工大学 纺织科学与工程学院,浙江 杭州 310018;2.浙江理工大学 浙江省智能织物与柔性互联重点实验室,浙江 杭州 310018;3.浙江理工大学 象山针织研究院有限公司,浙江,宁波 315600)
0 引 言
21世纪以来,随着物联网等科学技术的迅速发展,智能可穿戴设备应运而生[1],并被广泛应用于医疗、军事、航空航天等多个领域[2-5].纺织传感器作为一种智能柔性传感材料有着广阔的应用前景,尤其是在人体活动、健康检测以及病人监测等方面[6-7]。近年来,国内外对于织物基柔性传感器展开了广泛的研究。YAO等采用超声波纳米焊接方法在非织造布上制备了还原氧化石墨烯/碳纳米管杂化物的可穿戴性电子纺织应变传感器[8];ZENG等采用浸渍法制备了导电超疏水聚乳酸非织造布用于构筑压阻式压力传感器[9];QI等将多孔碳纳米管加入聚氨酯纳米纤维中制备压阻传感器[10];XU等在纤维上形成氧化石墨烯涂层并将其制备成湿度传感器, 用于监测人类呼吸活动[11]。
作为柔性传感器的基材,针织物不仅穿着舒适贴身、质轻无感[12],而且因其线圈结构使其具备优异的拉伸弹性和延展性[13]。针织应变传感器依靠其大尺度应变能力及高回弹性,成为智能柔性传感材料重点研究对象之一。ALAM等将导电石墨-聚氨酯纳米复合浆料应用于钩针编织弹性面料上, 制备了高灵敏度和机械性能稳定的应变传感器[14]。YE等采用3D隔离织物作为介电层,石墨烯纳米片(GNS)和镀镍编织织物作为电极构建触觉和无触摸传感器[15]。应变传感器主要通过应力作用下针织形变导致的电阻信号变化来建立联系[16-18]。针织物受力形变与拉伸方向、应变拉伸率之间存在紧密关系。在人体运动识别中,织物会有多维面上的拉伸,但目前对此方面的研究较少,缺乏有效应变电阻模型,阐明典型运动下织物多向应变传感机理及受力分布。
因此,本文以纬平针组织为传感器的基材组织,棉、涤纶为基材的纤维材质,以石墨烯为导电涂料,采用可规模化生产的喷涂法制备应变传感器,探讨织物经纬双向拉伸对其传感性能的影响,以及在人体运动监测等方面的应用。
1 实 验
1.1 材料
纬平针织面料,以棉涤混纺纱为基础纱,使用LWT34110L型单面大圆机编织,织物的橫密和纵密分别为55行/5 cm和 45列/5 cm,平均面密度169.67 g/m2,平均厚度0.51 mm;石墨烯纳米片(美国 XG 公司);N,N-二甲基甲酰胺(DMF,上海阿拉丁化学试剂有限公司);去离子水。
1.2 仪器
LWT34110L型单面大圆机(泉州佰源机械科技股份有限公司);Axio Cam Erc 5S蔡司偏光显微镜(北京普瑞赛司仪器有限公司);Ultra55扫描电子显微镜(北京普瑞赛司仪器有限公司);34465A数字万用表(是德科技中国有限公司);YG026T-Ⅱ电子织物强力仪(宁波纺织仪器厂);TGL-16 型离心机(伟嘉仪器制造有限公司);DZF-6050真空烘箱(巩义市予华仪器有限责任公司)。
1.3 材料制备
用去离子水将针织物清洗干净后置于干燥箱中 80 ℃烘干。DMF溶液中加入石墨烯粉末,超声处理60 min后,在离心机中离心2 min去除沉淀。将得到的试剂转移到高压罐中,通过对高压罐施加压力,使溶剂均匀喷涂在针织物表面并保持织物处于润湿状态2 min,喷涂结束后将针织物置于85 ℃的烘箱里完全干燥至恒重,待烘干后取出作为试样。处理后试样平均厚度为0.65 mm,平均面密度为203.6 g/m2,最终选择质量差在20%左右的织物为测试样品,经测量计算,传感织物平均电导率为36 S/m。
1.4 表征与测试
1.4.1 形貌观察
为了更清楚地观察织物处理前后的变化,采用蔡司显微镜分别拍摄织物处理前后的照片,采用扫描电子显微镜在加速电压为3 kV的条件下对制备的织物内部纤维进行形貌分析。
1.4.2 拉伸性能测试
使用YG026T-Ⅱ电子织物强力仪在标准大气压下进行测量。采用条样试验,夹持距离为10 cm,拉伸速度为100 mm/min,预加张力为1 N,沿织物纬向进行拉伸。每种样品测试5次,取平均值。
1.4.3 电学性能测试
复合织物的拉伸力学、电学及传感性能测试同时进行。实验采用两探针法测试织物的电学性能。在拉伸过程中,采用34465A数字万用表测得电阻的变化值,该万用表内置有 Agilent IntuiLink 软件,可以准确实时地记录拉伸过程中电阻值的变化。另外,为了评估织物经纬向导电的稳定性,在2 mm/min 的拉伸速度下,将织物拉伸到10%、25%、50%应变后回复到初始位置,反复循环10次,获得电学循环曲线。
1.4.4 柔性应变传感织物的关节运动识别监测
将50 mm×20 mm的纬平针织物柔性传感面料缝制成手套、袖套和护膝并置于其关节表面。一旦关节弯曲,柔性应变传感织物的针织线圈会在弯曲方向上延伸,从而导致沿弯曲方向的相对电阻不同程度地改变,测试中选择手指的45°、90°、握拳等3种弯曲角度,肘关节选择30°、60°、90°弯曲角度,膝关节依次完成微抬膝、高抬腿、深蹲3个动作,每个动作均以 15 s为一个循环,重复 5 次,并在完成动作的过程中用数字万能表测试关节不同运动状态下电阻值变化。
2 结果与讨论
2.1 纬平针织物形貌观察
利用蔡司显微镜拍摄的处理前后组织结构照片如图1(a)、(b)所示。

(a)原织物 (b)处理后织物
通过对比织物处理前后表面形貌可以发现,试样表面由原先的白色转变为灰黑色,织物组织结构均清晰可见,可以说明石墨烯材料浸入织物内部,而不仅仅只是在织物表面形成膜状物。为了进一步探查石墨烯材料在针织物纤维上附着情况,通过SEM观察了涤纶和棉纤维表面的形貌结构,如图1(c)、(d)所示.从图1(c)、(d)中可以细致地看到石墨烯涂层黏附在涤纶和棉纤维表面。
2.2 拉伸力学性能分析
图2(a)、(b)为纬平针织物处理前后断裂伸长率与断裂强力的关系图。

(a)经向
从图2可以看出,由于纬平针组织的结构特点,其纬向断裂拉伸量大于经向,而断裂强力小于经向。石墨烯处理后,织物经纬向断裂伸长率减少,而经纬向拉伸断裂强力普遍增加。拉伸过程中,石墨烯涂料之间相互黏连现象较为明显,织物内应力增加,纤维间相对滑移大幅减少,消除应力的能力减弱,织物的拉伸断裂强力增强,断裂伸长量降低,导致织物脆性增加。但织物不同方向的断裂强力受织物线圈密度、组织结构等因素影响,使织物经过处理后,纬向断裂平均强力增加20 N,低于经向的增加强力。
2.3 拉伸电学及传感性能
将获得的拉伸载荷下传感织物的电阻值进行统计整理,结果如图3所示。
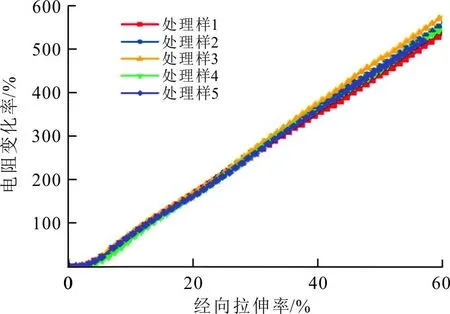
(a)经向
从图3可以看出,在拉伸载荷下处理后织物的经纬向电阻变化具有不同的特点,为了能够更好地分析传感织物的传感性能及其影响因素,采用应变灵敏度、线性度等指标来表征传感织物的传感性能。
传感器的应变灵敏度(GF)是定量评价传感器传感性能的重要参数[19],即导体的应变-电阻效应。传感器的灵敏度越高,传感性能越好,定义如式(1)所示。
(1)
式中:R0为未拉伸时的初始电阻;ΔR为拉伸时电阻变化量;ΔR/R0为电阻变化率;Δl为拉伸时拉伸方向上织物长度的变化;l0为未拉伸时织物的初始长度;Δl/l0为传感织物拉伸时拉伸方向上的应变量。
对拉伸载荷下传感织物电阻变化曲线进行线性拟合,可得到拉伸应变-电阻变化率的线性回归方程及其修正后相关系数的平方值。其中,方程的斜率即为传感器的应变灵敏度,而修正后相关系数的平方值则与传感器的线性度有关。根据图3的数据和公式(1)计算出石墨烯织物纬向传感系数为14.44,径向传感系数为9.46。对数据进行拟合处理后,可得到皮尔逊相关系数,相关系数分别为0.997和0.980。皮尔逊相关系数的平方值可用于反映因变量的变异系数。该值越接近 1,表示拉伸应变-电阻变化率回归方程越贴近线性模型,传感织物的线性度越好,传感稳定性越好。因此,根据传感系数和皮尔逊相关系数分析,此石墨烯功能针织面料是一种传感性能良好的柔性传感器。
2.4 纬平针织结构模型构筑及电学分析
为了进一步分析经纬方向上拉伸传感的差异,建立拉伸应变下的织物等效电阻模型,如图4所示。
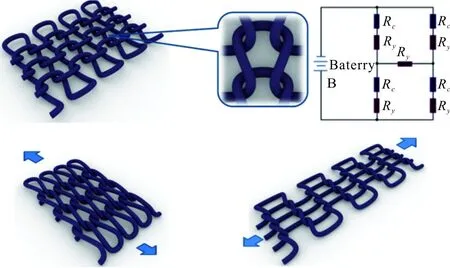
图4 纬平针组织经纬向拉伸模型图
针织应变传感器在拉伸应力作用下电阻变化的主要原因有2个:一是纱线沿受力方向发生转移,织物因长度增加而发生的体积电阻的改变是由于织物内部纱线的电阻变化导致,即Ry;二是在外力作用下线圈结构变形,纱线之间的接触电阻(Rc)发生变化,而总电阻的变化趋势主要由以上2个电阻决定[20]。静置状态下,织物线圈结构相互靠在一起,且电路中闭合回路较多,使得初始电阻较小。当传感织物受到拉伸时,线圈间会先在拉伸方向上进行纱线转移,使织物总长度在拉伸方向上增长,此时经过纱线转移抵消了大部分应力,使得在初始受力状态下线圈形态变化较小,接触压力增加不大,接触电阻的影响较小。当织物在经向受力拉伸至一定长度时,织物在垂直拉伸方向上会出现明显的“腰缩”现象,使得线圈间接触压力增加。根据接触电阻理论,纱线间接触点压力增加,接触电阻减小,导致电阻增速放缓。当继续受力应变时,为了满足织物继续形变需求,纱线本身因受拉伸而变细,导致纱线电阻增大;当线圈与线圈间相互分离,线圈分离稳定时,电阻达到最大值。当织物在纬向上拉伸至一定长度时,线圈间的接触电阻相比于经向拉伸时接触电阻小,而纱线拉伸过程中电阻增加趋势一致,导致其电阻变化比较大,同时传感系数比较高。
2.5 循环拉伸载荷下经纬向的电学性能分析
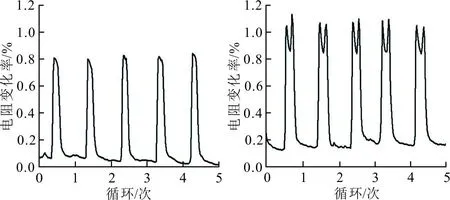
图5为经纬向在不同循环拉伸载荷下的电阻变化曲线。

(a)10%应变 (b)25%应变 (c)50%应变
可以看出,循环拉伸载荷下电阻变化具有一定的共同点。当电阻变化稳定后,每个循环内电阻都会出现上升-下降-上升-下降相同的波动趋势。对比经纬向电阻变化曲线可以发现,任一伸长率情况下,传感织物在纬向拉伸时的电阻变化幅度普遍大于经向。由于石墨烯针织面料属特殊结构,其线圈相互圈套重叠,具有显著的三维立体结构,截面线圈之间接触点的接触并不规则,且存在较多的空隙,因此针织物柔性应变传感器的电阻变化受纱线电阻、线圈纱段转移及纱线间接触电阻3个因素影响。纱线电阻随拉伸应变的增加而增加,线圈交叠处的接触电阻随拉伸应变的增加而减小,拉伸时线圈纱段的转移会改变圈柱、针编弧和沉降弧的电阻,导致等效电阻变化。从整体看,传感织物经过数次循环拉伸实验后,表现出较好的稳定性和传感性,但针织物出现拉伸疲劳现象,回复过程中织物没有回到最初的起始位置,造成电阻变化出现向上偏移,但这种电阻变化范围可控,对传感性能影响较小。另外,传感器在拉伸循环过程中,电阻在波峰阶段时会出现双峰或多峰现象。具体表现为在每次循环中,当传感器经历应变时,电阻先随应变拉伸增大而增加,拉伸至应变最大量时出现第一个波峰,然后在即将开始回复过程时,传感器织物突然松弛造成电阻激增,出现第二个波峰。这种现象是应变传感器拉伸回复时出现的迟滞性反映,此时在应变-电阻曲线上呈现出双波峰,拉伸量越大,滞后性越明显。这种滞后性是由针织物结构具有的塑性、纤维和纱线之间的摩擦力等引起能量的吸收与消耗造成的。
2.6 关节运动识别分析
一般人体的肢体动作应变比较大,针织物的大应变特征正好符合基本的测试应变要求。图6、7、8分别为指关节、肘关节和膝关节在不同弯曲状态下的电阻变化曲线。

(a)手指关节弯曲45° (b)肘关节弯曲90°

(a)肘关节弯曲30° (b)肘关节弯曲60°
(a)膝关节微抬膝 (b)膝关节高抬腿
可以看出,随着手指弯曲幅度的增大,电阻变化曲线中的波峰-波谷的波动差值变化范围更为突出。与手指运动类似,肘关节运动和膝关节运动都随着弯曲幅度增加而增加。
在大变形过程中,与循环拉伸载荷下电阻变化情况相似,每个循环单元电阻变化曲线基本上都有两个波峰。除此之外,从关节运动电阻变化曲线显示的初始电阻也可以看出,指关节传感织物的电阻变化率普遍高于膝关节、肘关节。这是由于袖套和护膝佩戴时过于紧绷,关节还未弯曲时,已经对织物基传感器进行了预拉伸,导致实际应用过程中织物基传感器形变过大,因此,制备搭载传感器的服用纺织品时,应同时考虑载体纺织品的弹性以及其弹性余量。
3 结 论
1)通过扫描电子显微镜证实石墨烯涂层较为均匀地包裹在纤维和纱线表面,并未在织物表面固结成膜,织物结构清晰可见;涂层后的石墨烯功能织物拉伸力学性能有所提高,且其传感性能良好,纬向传导系数达到14.44。
2)通过构建经纬向拉伸等效电阻模型,分析双向拉伸过程中纱线电阻和接触电阻动态变化差异可知,针织物柔性应变传感器纬向电阻变化幅度大于径向。在循环载荷实验中,纤维和纱线之间的摩擦引起的能量吸收消耗造成了双峰现象。
3)将制备的针织应变传感器搭载于日常手套、护肘和护膝等纺织品上,可实现人体指关节、肘关节、膝关节运动过程中的信息监测。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
纺织科技进展(2021年5期)2021-07-22 08:41:34
纺织科学研究(2021年6期)2021-07-15 08:41:30
纺织服装流行趋势展望(2020年3期)2020-02-01 06:42:52
电子制作(2018年23期)2018-12-26 01:01:26
纺织服装流行趋势展望(2016年6期)2016-05-04 03:53:07
纺织服装流行趋势展望(2016年1期)2016-05-04 03:45:50
国际纺织导报(2016年12期)2016-02-24 08:05:41
纺织科技进展(2015年1期)2015-11-28 05:56:29
