
国外典型高速/高超声速飞行器及其动力系统技术特点浅析
2022-02-15 12:10:20张宇超钟世林
燃气涡轮试验与研究 2022年4期
桂 丰,李 丹,张宇超,钟世林,李 茜
(1.中国航发四川燃气涡轮研究院,成都 610500;2.西北工业大学动力与能源学院,西安 710072)
1 引言
高超声速技术是未来具有战略制高点的多学科综合性技术,多个发达国家近半个世纪以来长期致力于高超声速技术的研究与发展,并取得了一系列突破。如美国通过数十年的研究,已经从概念和原理探索阶段,进入了以高超声速巡航导弹和高超声速飞机为应用背景的先期技术开发阶段。早在上世纪80 年代,美国就提出了NASP 计划,对超燃冲压发动机开展了广泛的基础研究,推动了高超声速技术的发展。2001 年启动了国家航空航天倡议(NAI),确定了高超声速飞行器的发展路线。之后又实施了多项新计划,如NASA 的Hyper-X、空军的Hytech、海军和美国国防预研局(DARPA)联合的HyFly、X-43、X-51 项目等,并结合NAI 计划对各种单项技术进行了突破和验证。与此同时,还开展了诸多其他计划,如研究革新涡轮基技术的RTA 计划;研究TBCC 推进系统方案的Falcon 计划、FaCET 计划、MoTr 计划和AFRE 计划;研究三喷气方案的TriJet 计划;研究高超声速飞机的SR-72和MANTA 项目等。这些计划和项目一定程度上在高速飞行器设计、高速飞行验证、飞/发一体化设计、高速涡轮发动机技术、涡轮基组合循环(TBCC)发动机技术等方面取得了突破[1-4]。
本文对典型高速飞行器动力方案进行研究,分析总结了方案的任务剖面及其尺寸质量、动力系统推力需求、燃料消耗等技术特点,以期为高速飞行推进系统的研究设计拓宽思路、提供支持。
2 典型高速技术研发计划
总体来看,国外高超声速技术的开发主要围绕高速涡轮发动机、冲压/超燃冲压发动机和TBCC发动机三个领域开展,且都取得了一系列具有重要价值的成果。
2.1 高速涡轮发动机
高速涡轮发动机作为TBCC 发动机低速段加速动力,亦可单独作为飞行器动力,是TBCC 发动机研究的基础。国外开展了以J58为代表的马赫数3.0+高速涡轮发动机以及革新涡轮加速器(RTA)计划等研究[5]。
2.1.1 SR-71 飞机
SR-71 飞机是美国上世纪70 年代研发并服役的马赫数3.0+高空高速战略侦察机,其动力J58 发动机为带加力的单轴涡喷发动机,最大飞行马赫数可达3.2,飞行包线如图1 所示。图中,H为飞行高度,Ma为飞行马赫数。SR-71 加速时的飞行剖面为:以马赫数0.3 起飞,加速爬升到高度7.6 km后,等高加速到马赫数0.9,再以马赫数0.9 爬升到高度10.0 km,中途进行空中加油;然后通过俯冲解决动力跨声速推力不足问题,俯冲破音障加速到高度8.5 km、马赫数1.2,等高度加速至马赫数1.32,再沿着926 km/h 等当量空速线一直加速爬升到高度17.0 km、马赫数2.6;此后按照当量空速加速爬升至高度21.0 km、马赫数3.0,其中当量空速从926 km/h 至769 km/h 线性减小[6-7]。总体来看,SR-71 飞机在超声速之后,其爬升轨迹基本上贴近飞行包线下边界[7]。
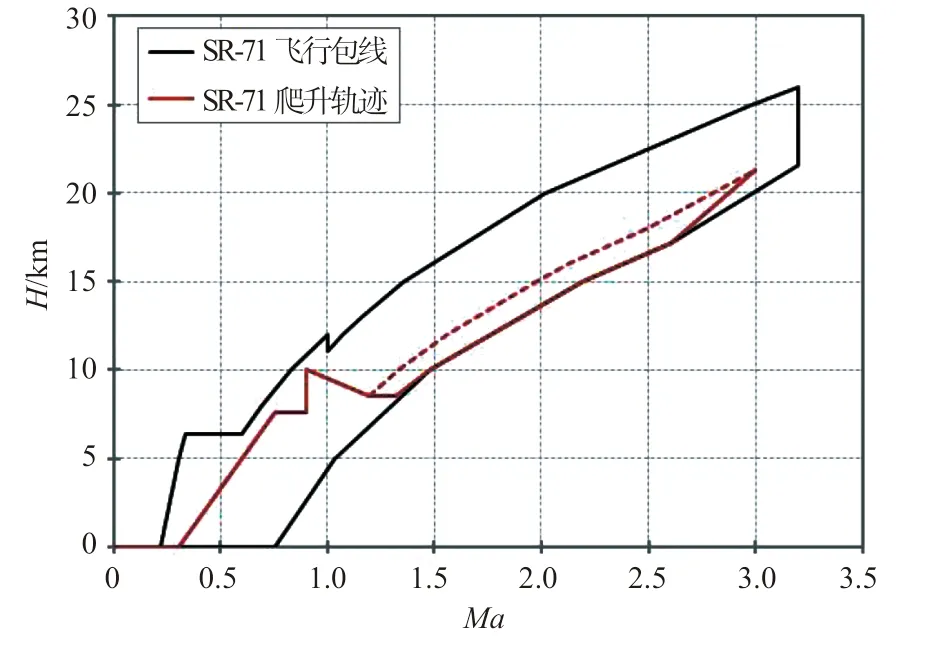
图1 SR-71 飞机飞行包线及爬升剖面Fig.1 Flight envelope and profile of SR-71
2.1.2 RTA 计划
RTA 计划是马赫数4.0+的涡轮基组合循环发动机验证计划,RTA 验证机为变循环加力涡扇发动机[7-8]。其加速段飞行剖面如图2 所示:从起飞到马赫数1.6,RTA 发动机以单涵道形式工作[9](在高度3.0 km 左右完成破音障),一直加速爬升到高度5.0 km、马赫数1.7;此时开始双涵道模式转换,加速爬升至高度8.0 km、马赫数2.0 时,完成双涵道模式转换,发动机开始进行涡扇到冲压的模态转换,在高度15.0 km、马赫数3.5 完成涡轮/冲压模态转换;最后以冲压模式加速到高度18.0 km、马赫数4.0,完成整个加速爬升过程。其中,在马赫数3.0~3.5 之间,转子转速和涡轮温度均下降;马赫数3.5 时,核心机发动机完全处于风车状态,以确保发动机快速起动、驱动发动机附件及降低暴露在最高进口温度下的旋转部件的机械载荷;马赫数大于3.5 时,发动机处于纯冲压模式。

图2 RTA 加速段飞行剖面Fig.2 Flight profile of RTA acceleration phase
2.1.3 其他计划
美国DARPA 和美国空军在VAATE 计划下联合实施了HiSTED 计划。在该计划的支持下,威廉姆斯国际公司开发了一款高马赫数、中等压比的短寿命涡轮发动机验证机,并在地面试验中完成了马赫数2.0~2.5 和马赫数3.2 运转试验验证[10]。VAATE计划结束后,在ATTAM 计划创新构型和技术领域中,实施了子计划高马赫数涡轮发动机,研发用于高马赫数飞行的TBCC 发动机可重复使用的涡轮发动机。
2.2 冲压发动机
超燃冲压发动机作为TBCC 发动机高速段加速和巡航动力,是TBCC 发动机研究的难点。典型研究计划有X-43A 和X-51A 等。
2.2.1 X-43A 计划
在NASA 兰利研究中心和德莱顿飞行研究中心联合开展的Hyper-X 项目中,开发了一种以氢燃料超燃冲压发动机为动力的飞行器X-43A,并成功实施了飞行试验[11]。X-43A 飞行器飞行剖面如图3 所示:B-52B 飞机先将总质量17 t 的助推火箭和X-43A 飞行器运载至12.19 km 的高空并投放;5 s 后助推火箭点火,携带X-43A 飞行器加速爬升,在高度19.81 km 平飞并进一步加速;在高度28.95 km、马赫数6.83 时X-43A 与助推火箭分离,超燃冲压发动机起动并持续工作8 s,最后无动力飞行直至降落。
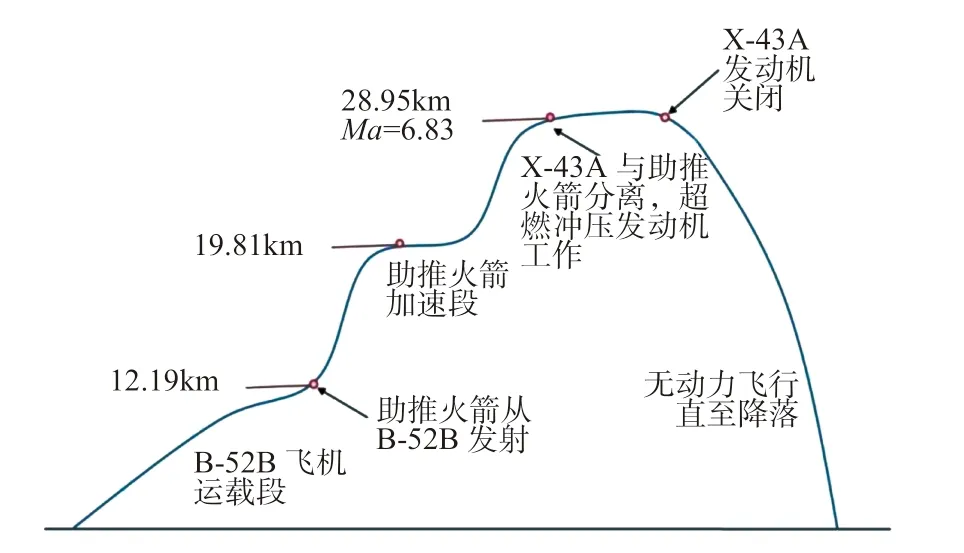
图3 X-43A 飞行器飞行剖面Fig.3 Flight profile of X-43A
2.2.2 X-51A 计划
美国空军研究实验室(AFRL)/美国国防预研局联合研发了X-51A 超燃冲压发动机验证机[10,12]。X-51A 的飞行剖面如图4 所示:先由亚声速运载器B-52H 运送至高度15.0 km、马赫数0.8;从飞行器装载机发射后,再由ATACMS 固体火箭助推到超燃冲压发动机运行所需高度和马赫数(高度18.0 km、马赫数4.5);助推完成后,巡航器从助推器和级间段分离,此后超燃冲压发动机点燃并燃烧近240 s,X-51A 预计达到马赫数6.0 左右;在超燃冲压发动机停止运行后,飞行器将以惯性飞行直至降落。X-51A 使用JP-7 碳氢燃料。
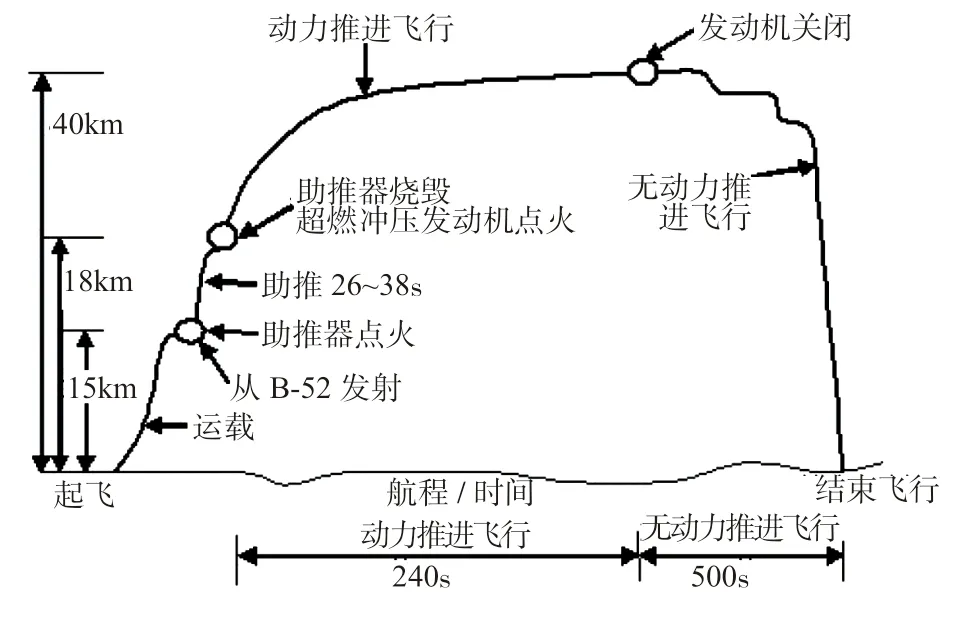
图4 X-51A 飞行剖面Fig.4 Flight profile of X-51A
2.2.3 其他计划
继X-51A 计划之后,美国空军又提出了MSCC计划,旨在研发流量45 kg/s 量级、马赫数3.5~7.0的中等尺寸超燃冲压发动机关键部件技术。2019年8 月,诺格公司开发的超燃冲压发动机,在马赫数4.0 工况下,发动机推力达到57.8 kN 量级。
2.3 TBCC 发动机
以高速涡轮发动机与冲压发动机组合而成的TBCC 发动机,是实现水平起降高超声速飞行的理想动力。TBCC 推进系统一体化计划、Aztec 方案、LAPCAT(长期先进推进概念和技术)计划等,研究了其所涉及的典型任务剖面。
2.3.1 TBCC 推进系统一体化计划
TBCC 推进系统一体化计划是由美国空军研究试验室推进部(AFRL/PRA)发起的,由AADC 公司和SPIRITECH 联合开展,旨在探索推进单元组合系统一体化技术[13]。该计划根据X-43B 飞行任务修改,采用高度为12.19 km、马赫数为0.7 的无动力空投,然后飞行器将一直加速到马赫数7.0。加速的第一部分由涡轮发动机提供动力,后面一部分则由双模式超燃冲压(DMSJ)提供动力。计划明确了带加力的涡喷发动机是加速任务的首选,确定了以马赫数4.0 作为过渡马赫数,及马赫数3.5~4.5作为过渡区域;空投后采用俯冲加速破音障的方式,空投由高度12.0 km、马赫数0.7 俯冲加速到高度6.0 km、马赫数1.5 左右,此后由涡轮基加速爬升到高度18.0 km、马赫数4.0;然后开展模态转换,最后由超燃冲压发动机加速爬升到高度24.0 km、马赫数7.0 实现巡航。飞行剖面如图5 所示。图中,横坐标采用的是无量纲时间。这个方案需要马赫数4.0+的涡轮基,鉴于RTA 的经验,其实现难度较大。

图5 飞行剖面图Fig.5 Flight Profile of TBCC
2.3.2 Aztec 方案
Aztec 方案是NASA 在ASTP(先进空间运输)计划下研究的一种采用TBCC 和HEDM(高能量密度物质)推进技术的水平起飞、水平着陆(HTHL)的双级入轨(TSTO)飞行器[14]。Aztec 第1 级由10台TBCC 发动机提供动力,以加力涡喷、冲压和超燃冲压3 种不同的模式工作。TBCC 发动机为上下结构配置,上流道为低速涡喷流道,下流道则是高速冲压和超燃冲压模式流道;发动机起飞推重比为0.6,从起飞到马赫数2.5,以涡喷模式工作。第2 级由3 台HEDM 火箭发动机提供动力。在跨声速区域(高度12.0 km、马赫数0.8~1.5),两级发动机一起工作。第1 级TBCC 发动机,以涡喷模式工作至马赫数2.5 时,切换到冲压喷气模式,并沿着等速压线飞行至高度24.0 km、马赫数6.0;然后TBCC 发动机切换到超燃冲压喷气模式,加速到高度27.0 km、马赫数8.0。达到马赫数8.0 后,第2 级分离,第1 级以冲压喷气模式转向并往回飞,同时第2 级HEDM 火箭发动机重新点火,推动第2 级达到运行轨道,释放酬载,最后执行无动力的自主返回着陆。Aztec 的任务循环如图6 所示。
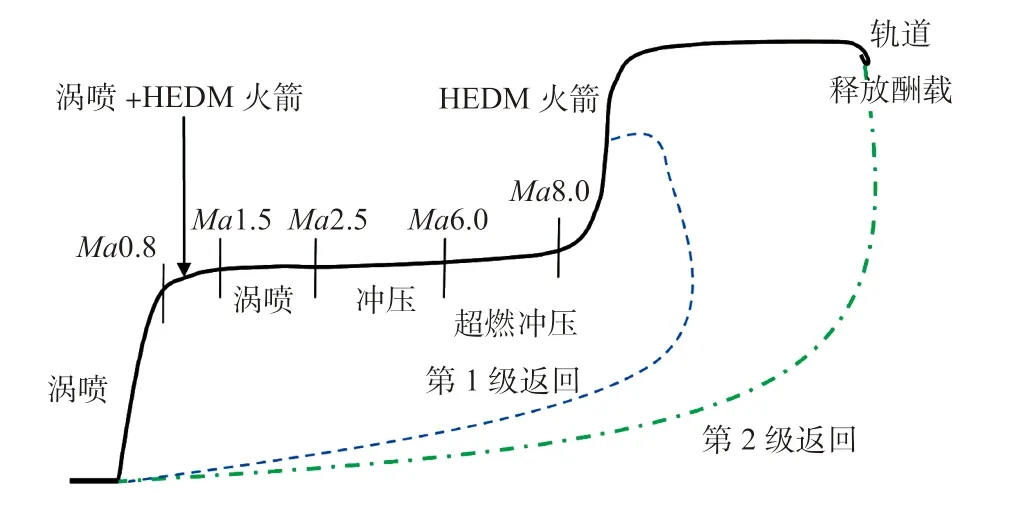
图6 Aztec 任务循环示意图Fig.6 Sketch map of Aztec mission cycle
2.3.3 LAPCAT 计划
在欧洲航天局的支持下,欧盟自2005 年开展了LAPCAT 计划,设计了以TBCC 发动机为动力的A2 高超声速飞行器[15]。LAPCAT A2 飞行器以马赫数0.40 起飞,加速到马赫数0.70 后,以30 kPa 等动压线爬升到高度6.0 km、马赫数0.95,跨声段平缓加速爬升到高度6.7 km、马赫数1.20,此后沿着50 kPa 等动压线一直加速爬升到高度25.5 km、马赫数5.00。LAPCAT A2 飞行器全程采用液氢燃料,最终实现马赫数5.0 一级的巡航速度及18 700 km 的超远航程,其加速爬升过程如图7 所示[16-17]。
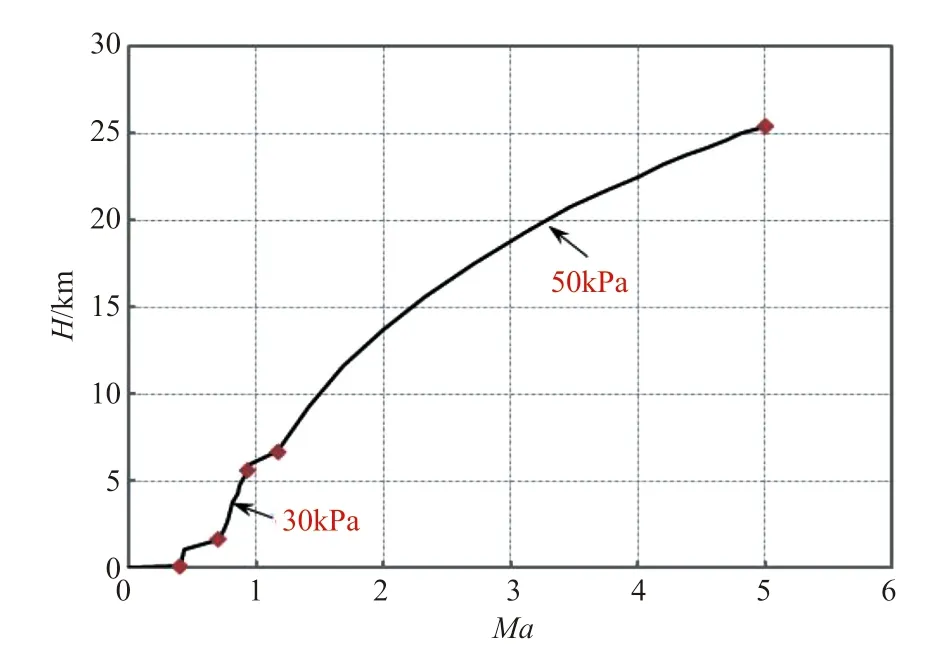
图7 LAPCAT A2 飞行器爬升轨迹Fig.7 Climbing trajectory of LAPCAT A2
2.3.4 其他计划
除了以上已经完成或正在实施的计划外,针对高超声速飞机及其TBCC 动力,美国还开展了MANTA 计划、SR-72 计划、AFRE 项目等研究。
MANTA 计划是美国空军牵头,由波音公司承担的高超声速飞机研究项目,旨在研发临近空间侦察、打击平台。采用机头三维内转进气,小展弦比大后掠翼身融合布局;机长36.0 m、起飞总质量120.0 t、载荷2.5 t、航程5 000 km。其动力装置为涡轮基与双模态冲压发动机并联组合的TBCC 发动机,巡航马赫数5.0+,最大飞行马赫数7.0;返航时采用涡轮动力。
继MANTA 计划之后,波音公司于2018 年分别提出了高超声速军用飞机和高超声速民用飞机的方案。高超声军用飞机采用大后掠双三角翼加双垂尾布局,机身有明显的隆起脊背,机腹平坦,两侧有大后掠边条,以TBCC 发动机为动力。其性能指标瞄准飞行马赫数5.0 以上,强调飞发一体化技术在方案研究中的重要性。高超声速民机则明确其TBCC 发动机采用现货涡轮发动机引入预冷技术与亚燃冲压发动机串联组合方案,以马赫数5.0 巡航,巡航高度为29.0 km,跨大西洋时间约为3 h。
SR-72 计划是由洛马公司臭鼬工厂承担的一款高超声速飞机的研究项目,预计2025 年实现验证机首飞,2035 年研制出实用型高超声速飞机。SR-72 飞机采用翼身融合体气动构型,机长30.5 m,最大巡航马赫数6.0,航程4 800 km,配装2台并联式TBCC 发动机。其中,高速涡轮基采用HiSTED/RATTLS 计划研发的高速涡轮发动机,工作马赫数0~3.0;冲压发动机为FaCET 计划研发的双模态超燃冲压发动机,工作马赫数2.5~6.0;在马赫数3.0 时完成模态转换,由冲压发动机接力,以实现马赫数0~6.0 的全速域工作。
2019 年5 月,美国赫尔墨斯公司公开披露了马赫数5.0 级高超声速民用飞机研发项目,计划充分利用现有和短期内可实现的技术,研制一型最大飞行速度为马赫数5.0、载客人数20 左右、航程约7 400 km 的高超声速民用飞机。2020 年3 月,完成了一款基于TJ-100 涡轮发动机(推力1.1 kN、直径约0.27 m)的小型TBCC 发动机集成与试验,最大马赫数达到5.0。其地面试验状态点见图8。2021 年7 月,美空军联合私营投资公司授予赫尔墨斯公司1 份总额6 000 万美元、为期3 年的科研合同,要求完成一型TBCC 发动机的飞行验证和3 架夸特马高超声速飞行验证机的研制与试飞等工作。夸特马验证机采用单台串联式TBCC 发动机,进气道采用三维内转式方案,初步判断喷管应该为二元喷管方案[18];目前正在开展地面试验相关工作。赫尔墨斯公司最新公布的高超声速飞机规划为,2023 年研制小型无人验证机,2025 年研制可执行应急货运和侦察任务的中型无人机,2029 年研制用于公务的客运飞机,总体上遵循了“从小到大、从无人到有人”的发展思路。
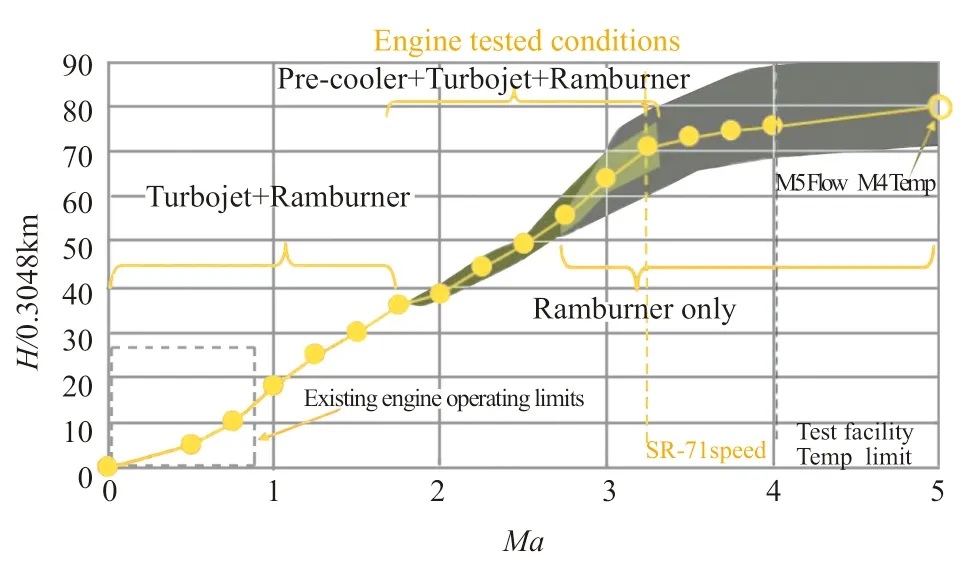
图8 赫尔墨斯公司的小型TBCC 发动机地面试验状态点Fig.8 Hermeus TBCC engine tested conditions
3 典型任务剖面分析
图9 给出了吸气式发动机的飞行走廊以及典型任务剖面。包线上边界主要受飞行器气动特性(最大升力系数)限制,下边界主要受限于飞行器结构材料(高气动热和气动力载荷)[19]。对于涡轮发动机,由于受内流道压力、气动热载荷及气动力载荷等约束条件综合影响,其飞行包线相对较狭窄。在马赫数4.0 时的进气总温超过900 K,按照目前压气机盘材料温度1 100 K 的限制及0.8 的效率水平,压气机压比不到1.8,此时压气机基本无压缩能力[19]。而对于冲压发动机,较大的气动压力可为燃烧室提供足够的静压以维持良好的燃烧,从而提供大的推力,所以高超声速飞行器在高速/高超声速段由冲压发动机提供动力较为合适。
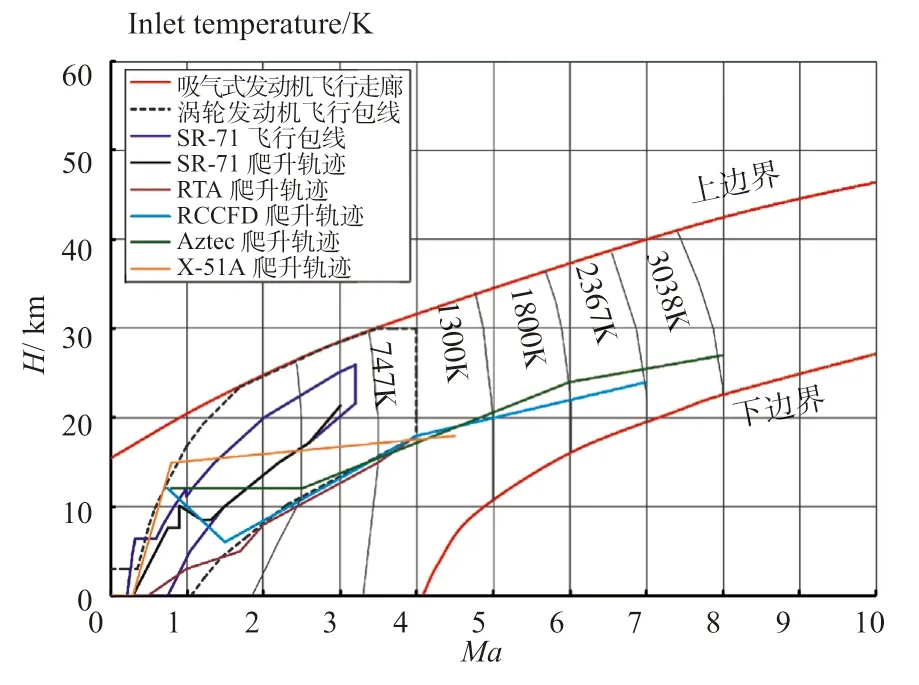
图9 吸气式发动机飞行走廊及典型任务剖面Fig.9 Flight envelope and typical profile of airbreathing propulsion
从国外典型飞行方案的任务剖面看,超声速以上飞行轨迹趋向于气动压力较大的下边界,如SR-71 和RTA 等。X-51A 和Aztec 方案都采用了火箭助推,从而能快速突破音障,因此其任务剖面不受涡轮发动机包线限制。以RTA 计划为代表的马赫数4.0 变循环高速涡轮基方案,通过涡扇、涡喷模式转换的方式增推,以实现突破音障。但从其计划的中止来看,马赫数4.0 涡轮发动机设计难度太大,可见马赫数4.0 涡轮基组合的TBCC 推进一体化方案不易实现。鉴于RTA 计划以及J58 发动机的启示,无预冷的高速涡轮基相对可行的最大飞行马赫数约为3.5。根据高速/高超声速TBCC 发动机并联组合形式,低速段动力采用马赫数3.0+的涡轮基更符合实际适用条件与范围。由此可得出:
(1) 带火箭基的RBCC 或T/RBCC 的三喷气方案中,在突破音障时,大都以火箭发动机为主要动力或辅助动力;变循环形式的涡轮基可通过变循环模式转换来实现助推;而对于跨声加速推力不足,可采用类似J58 发动机俯冲加速的方式。
(2) 目前高超声速飞机的TBCC 动力,主要集中采用涡轮发动机与双模态冲压发动机并联组合形式。其中,涡轮与双模态冲压发动机的模态转换过渡马赫数一般在2.5~3.5、高度在15.0~18.0 km 较为合适,工作马赫数范围0~3.5+的高速涡轮发动机是未来TBCC 发动机的必然趋势。
(3) 以TBCC 发动机为动力的高速飞行器在返回初始阶段一般可采用无动力滑行,最后着陆阶段再采用涡轮发动机作为动力,具体使用方式由飞行器任务需求而定。
4 典型高速飞行器的性能特点
4.1 飞行器尺寸、质量
国外实施了多个高速飞行计划,对飞行器外形尺寸、结构质量等进行了大量的研究。如欧洲的LAPCAT 计划,其中有发展前途的飞行器方案是250 座、巡航马赫数4.5、航程12 000 km 的超声速客机LAPCAT-M4 方案,以及马赫数8.0、航程18 000 km 的LAPCAT-A2 方案;水平起飞、水平着陆(HTHL)的双级入轨(TSTO)飞行器Aztec 计划等[14,20-21]。上述计划因任务需求不同,其外形尺寸、结构质量、部件质量比例等也各不相同。
表1 和表2 示出了典型高速民用飞行器的外形尺寸和质量分布。从表1 可看出,为了适应高速飞行,高速飞行器一般采用高升阻比的气动外形,机身大多扁平以减小迎风面积。目前适合的外形主要有乘波体(如X-51A)、升力体(如X-43A)和翼身融合体(如SR-72、MANTA)。由表2 可看出,飞行器质量都很大,燃料所占比重均较高(最高达到近70%),负载比重较低,飞行器净质量占比一般在30%左右,动力系统占比基本在15%左右。而任务性质不同决定了飞行器各部分质量比重分配。如Aztec 第1 级主要作用为加速、爬升、运载,无巡航需求,所以其燃料比重较低;而由于运载要求,负载占比达到36%,同时由于第1 级运载的推力需求导致发动机数量众多,使得其动力系统占比达到43%。为此,在进行飞行器及其发动机设计时,必须首先明确飞行器性质及任务需求。

表1 典型高速民用飞行器外形尺寸Table 1 The external dimensions of typical high speed civil aircraft

表2 典型高速民用飞行器质量及比例Table 2 The mass and proportion of typical high speed civil aircraft
4.2 推力需求
飞行器任务性质决定了对发动机推力的需求。高速飞行器如LAPCAT-M4、Aztec 计划及SR-71等的推力需求,单发地面起飞推力均在14.71 kN以上。表3 给出了典型高速飞行器的推力需求[20-21]。可看出,高速飞行器的推重比不高,在0.3~0.6 之间。如果采用常规涡喷发动机作为低速动力,需要采用俯冲的方式突破音障。

表3 典型高速飞行器的推力需求Table 3 The thrust requirements of typical high speed aircraft
4.3 燃料消耗
高超声速飞行器因其特殊的飞行空域和速域,在方案设计时对各系统的质量尤为敏感。其中,燃料系统占据的比重很大,且相当大一部分燃料消耗在飞行器加速飞行过程中[22]。SR-71 是目前唯一服役过的巡航速度超过马赫数3.0 的飞机,对现阶段高/高超声速飞行器的设计具有指导意义。SR-71飞机虽已退役且美国公开了该机的部分参数,但绝大多数核心参数依然未对外界公布。基于可查阅的资料数据,如飞行轨迹、部分气动特性等[5,23],对SR-71 飞机飞行过程的燃料消耗进行了简要分析,分析流程见图10,结果见图11。可以看到,SR-71在马赫数0.90 完成空中加油后,加速爬升至马赫数3.15 开始巡航时,将消耗约40%燃料,而航程仅为20%左右。可见加速过程的燃油消耗是SR-71飞行器燃料消耗的重要部分。
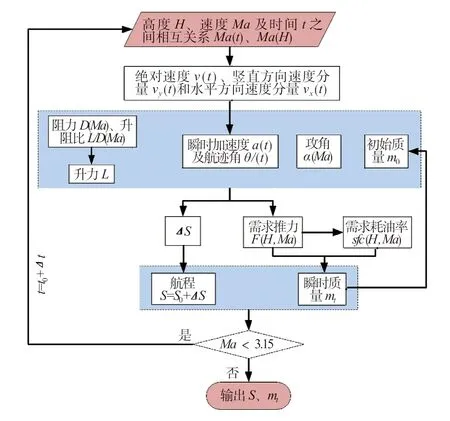
图10 基于文献数据的SR-71 燃料消耗分析流程Fig.10 Fuel consumption analysis process of SR-71 based on literature
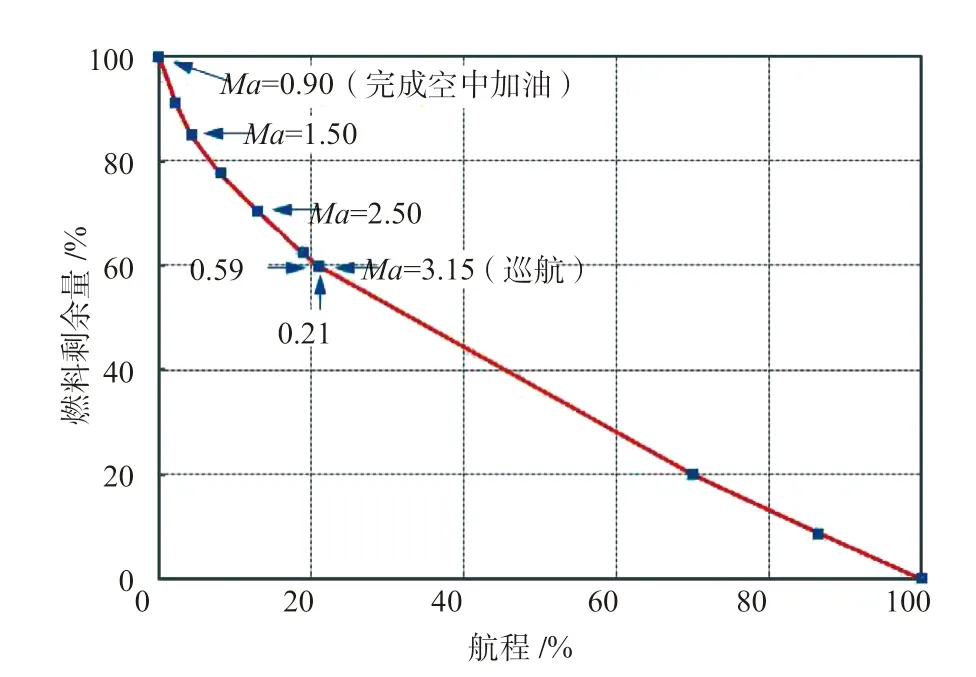
图11 SR-71 飞行过程燃料消耗量Fig.11 Fuel consumption of SR-71 during flight
高超声速飞行器由于巡航马赫数高,所以其加速马赫数跨度大,加速过程也比较长。相比常规飞行器,其燃料消耗量将会更大,因而其燃料消耗量需在航程与推力上进行权衡,即有效加速是关键。图12 示出了马赫数7.0 飞行器飞行过程中的燃料消耗。可看出,飞行器飞行过程中加速到马赫数1.5时需消耗10%的燃料,加速到马赫数2.5 时又将消耗10%的燃料(共计消耗约20%的燃料),飞行器加速到马赫数4.0 时将共消耗34%的燃料,剩余约66%的燃料;而飞行器到达其巡航速度马赫数7.0时又将消耗20%的燃料,整个加速过程燃料消耗量达到54%,燃料剩余量已不足总燃料的一半。这些燃料消耗可通过增大助推时的有效比冲来减少,同时当推进系统部分关闭时,需额外的燃料消耗来加速推进系统。
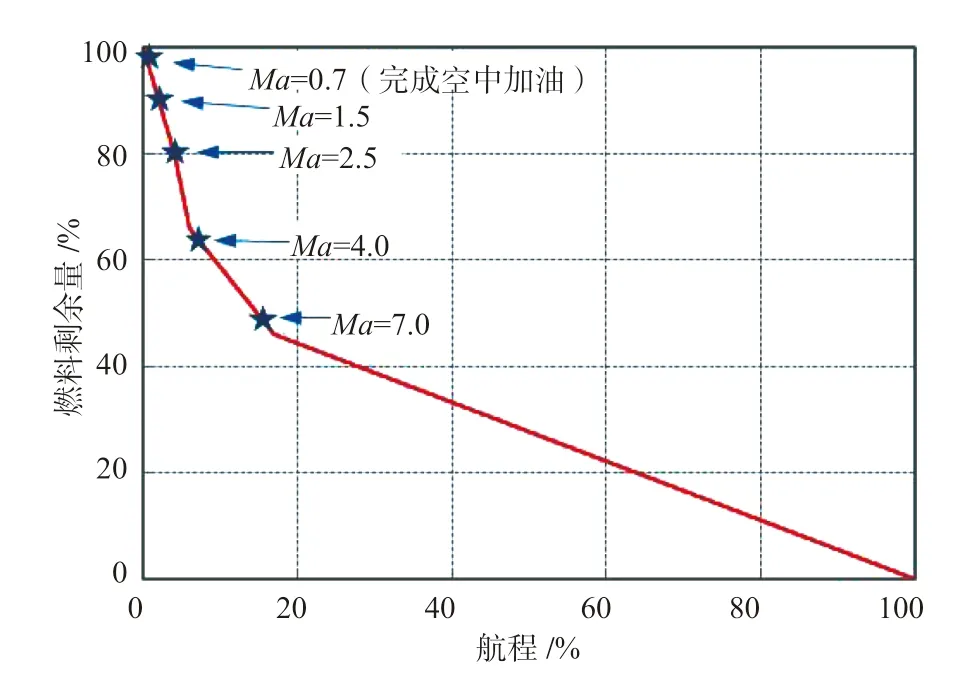
图12 马赫数7.0 飞行器飞行过程燃油消耗量Fig.12 Fuel consumption of Mach 7 aircraft during flight
5 结论
针对国外典型高速/高超声速计划或项目,通过分析其典型任务剖面及飞行器尺寸、质量等参数,总结了高速/高超声速飞行器及其动力装置的技术特点和发展规律。研究主要得出以下结论:
(1) 飞行器任务需求不同,其飞行剖面及相应的动力形式也不同。基于目前的研发情况,以马赫数3.0+的高速涡轮基与亚燃或双模态冲压发动机的组合形式,是较为理想的高速/高超声速飞行推进模式。
(2) 高速/高超声速飞行器起飞质量大多为80 t量级及其以上,起飞推重比基本在0.3~0.6之间;其动力一般采用双发或多发布局,单发起飞推力均在14.71 kN 量级及其以上。
(3) 高速/高超声速飞行器随着飞行速度的提升,飞行包线会越发狭窄。考虑到高速/高超声速带来的气动负荷等问题,以及尽可能维持较好的加速飞行性能,未来高速飞行器超声速以上爬升轨迹会趋近于飞行包线的下边界。
(4) 对于高速/高超声速飞行器,由于其特殊的飞行空域和速域,相比常规飞行器,其燃料消耗量将更大,为此需在航程与推力上进行权衡。
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01 06:29:48
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
数学物理学报(2021年5期)2021-11-19 07:01:30
装备制造技术(2020年9期)2021-01-26 00:14:34
科学技术与工程(2020年30期)2020-12-04 05:06:30
小哥白尼(趣味科学)(2018年5期)2018-06-21 06:24:32
世界制造技术与装备市场(2015年6期)2015-02-28 22:20:24
太空探索(2014年5期)2014-07-12 09:53:28
科技传播(2013年22期)2013-10-17 11:16:36
实验流体力学(2013年2期)2013-09-21 07:52:40
