
天然气水合物样品带压转移装置的抓捕机构设计
2022-02-15 03:32黄柳松卢春华赵慧斌
钻探工程 2022年1期
黄柳松,卢春华,赵慧斌,张 涛
(中国地质大学(武汉)工程学院,湖北武汉430074)
0 引言
天然气水合物是在低温、高压条件下由水分子和烃类气体分子(主要是甲烷)形成的似冰状的笼形晶体[1],是一种高效的清洁能源,有很高的能源密度,在标准状态下1 m3的天然气水合物可分解成164 m3的甲烷气体和 0.8 m3的水[2-4]。由于天然气水合物特殊的赋存环境,我国的天然气水合物资源主要分布于南海及邻近海域和青藏高原及东北冻土带中[5-7]。
天然气水合物对温度压力条件的变化很敏感[8],温度升高或者压力降低都会引起固体水合物的分解[9-10],因此很难获得原位状态下的天然气水合物样品。当取得天然气水合物原位岩心样品后,保证岩心样品安全、完整、不受扰动地转移到检测、储存系统[11],要配备与取心钻具配套的转移装置[12],将岩心样品从岩心管转移到后处理系统中或者储存起来[13]。
目前根据我国天然气水合物保压取心钻具的研究现状,相继研发成功了可适应不同地层条件的多种常规取心钻具和保压取心钻具,已经可以实现原位取样[14-16]。课题组正在研发天然气水合物后处理系统,实现取心钻具与后处理系统的对接至关重要,设计岩心抓捕机构的目的是保证将保压取心钻具里的岩心带压转移至后处理系统进行检测,且还要对岩心扰动小。本文提出了一种用于天然气水合物带压转移系统的岩心衬管抓捕装置,该岩心衬管抓捕装置用于在天然气水合物带压转移系统中实现对岩心衬管的抓取、拖动、定位和释放动作,其结构简单、性能可靠,可实现精准定位和快速抓取、释放。
1 天然气水合物岩心样品带压转移系统
1.1 带压转移系统组成
带压转移系统技术装备如图1 所示,主要包括抓捕单元、切割单元和测试单元、储存单元等,所涉及的技术包括温度控制技术、高压密封技术、压力控制技术[17]、样品带压切割技术等。切割单元一端与抓捕单元连接,另一端与保压取心筒[18-19]、测试单元或者岩心储存筒通过快速接头连接,可实现快速更换功能单元的目的。

图1 岩心样品带压转移系统Fig.1 Pressure transfer system for core samples
1.2 带压转移过程
天然气水合物岩心样品带压转移过程可分为对接、抓捕、切割、测试和储存,当保压取心钻具取回岩心样品后,与切割单元的快速接头对接,待系统内部压力保持平衡后,球阀打开,抓捕机构穿过切割单元钩住岩心衬管,回拖岩心衬管,关闭球阀,与取样器保压单元分离。岩心衬管在抓捕机构的推动下经过切割单元,根据需要进行岩心切割,将分段岩心分别送入测试单元进行参数测试和储存单元中储存。整个带压转移过程如图2 所示。
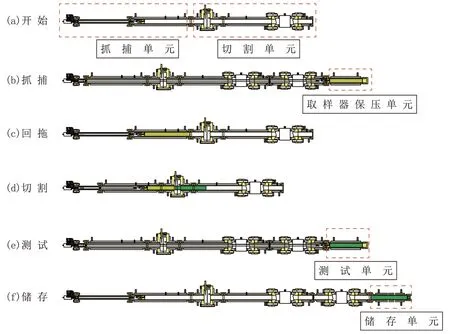
图2 岩心带压转移过程示意Fig.2 Core pressure transfer process
在转移过程中,需要克服的难点就是如何将岩心从一个密闭保压容器中转移到另一个密闭保压容器。在井下通过保压取心钻具将水合物岩心钻取入岩心管后,将带有原位压力的岩心取到地表,然后转移至水合物后处理装置进行参数测试等实验,全程需要保证岩心的原位状态压力,尽量对岩心扰动小。
目前进行岩心转移的方法是通过拉取岩心衬管,将岩心并带转移。海洋钻探取心大多数采用透明的PVC 管作为岩心衬管,其本身有一定的壁厚,刚性和韧性并存,所以将研究的核心放在了衬管的抓捕转移上。
2 岩心衬管抓捕机构设计及工作原理
2.1 抓捕机构设计
由于岩心抓取是在岩心管内进行[20],同时岩心样品和抓捕器都处于高压液体中,岩心衬管与岩心管之间的间隙非常小,抓捕器只能从岩心衬管的内部抓取并进行回拉,根据实际要求进行岩心切割,将各部分岩心送入各功能单元后实现自动脱扣。图3为抓捕机构设计示意图,该岩心衬管抓捕装置包括端面密封与驱动部件、抓捕头部件、丝杠和外管总成,外管总成用于放置岩心衬管和岩心,端面密封与驱动部件位于外管总成的左侧,用于左端面的密封并驱动抓捕头部件,抓捕头部件位于外管总成的右侧,用于抓捕岩心衬管。
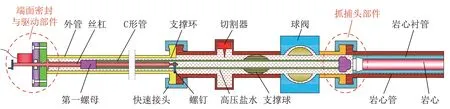
图3 抓捕机构示意图Fig.3 Capture mechanism
该机构在驱动部件的驱动下,通过丝杠和螺母的配合,可实现前后移动。具体地,第一螺母与C 形管固定在一起,且安装支撑环的支撑杆穿过C 形管的沟槽,C 形管不会随着丝杠一起旋转,而是做直线运动。驱动方式设计有电机驱动和手摇驱动,在进行大幅度的移动时,使用电机驱动,方便快捷,在进行精准定位和抓取解卡步骤时,采用手摇驱动,稳定准确。
2.2 抓捕头设计
抓捕头利用L 形挂钩与挂盘配合的方式实现位置锁定,采用在岩心衬管上开倒钩的方法,与抓捕头探针相配合,实现稳定抓取,再利用与L 形挂钩配套的弹簧和触碰杆实现自动脱扣的功能,抓捕头的具体结构如图4 所示。

图4 抓捕头结构Fig.4 Structure of the capture head
L 形挂钩总共为3 个,沿圆周均匀分布,通过销轴安装在外壳上。第二螺栓的一端通过螺纹固定在外壳外,另一端穿过L 形挂钩后安装第三螺母,将触碰杆固定在L 形挂钩上;第二螺栓上套有第一弹簧,触碰杆与L 形挂钩的一边通过螺纹固定,在弹簧的张力作用下L 形挂钩保持收缩的状态。
图5 为抓捕头前端实物。触碰杆的外端是带有45°斜面的金属杆,与之相配套的有一个带45°锥面的解卡套筒,在抓捕头收回的过程中,触碰杆接触到解卡套筒,在锥面的作用下触碰杆向外张开,带动L形挂钩压缩弹簧,使L 形挂钩向外旋转,解开与挂盘的锁定。

图5 抓捕头前端实物Fig.5 Photo of the capture head
C 形管通过螺纹与心轴左端连接,在心轴上安装挂盘,通过第五螺母固定。心轴台阶处和外壳之间装有第三弹簧,右端端面为球状。
外壳前端的直径略小于岩心衬管的内径,构成一个台阶,既能保证抓捕头前端伸进岩心衬管内,又可以卡住衬管与抓捕头的相对位置,抓捕头前端伸进去的工作距离很小,在5 mm 以内,在充满岩心的情况下通过手动旋转抓捕头,可以将岩心错动一点距离,对抓捕动作的实现影响不大。在台阶处径向均布3 个探针。探针的外端为针状,主要起拖挂岩心衬管的作用,内端为球状,使其与心轴之间为点与点接触,方便心轴顶起探针,里面装有垫片和第二弹簧。初始状态下,心轴没有伸出,在第二弹簧的作用下,探针全部沉在外壳的径向台阶孔内。
2.3 工作原理
在球阀处于关闭状态下,将内有岩心衬管和岩心的取样器保压单元通过快速接头与水合物岩心转移系统对接,随后打开球阀,并维持系统处于稳定高压盐水中,根据岩心带压转移过程,抓捕机构的工作过程可分为前进、抓捕、回拖和解卡4 个过程。
(1)前进:启动驱动部件的电机,带动丝杆旋转,第一螺母和C 形管沿着轴向做直线运动,抓捕头部件不断的接近岩心衬管。当抓捕头部件快接近岩心衬管时,通过手摇的方式使丝杠缓慢旋转,直到抓捕头部件前端的台阶面碰到岩心衬管,外壳停止前进。此时挂盘还未被L 形挂钩锁住,探针还潜埋于外壳内,如图6、图7 所示。

图6 抓捕头初始状态原理Fig.6 Principle of the initial state of the capture head

图7 抓捕头初始状态实物Fig.7 Photo of the initial state of the capture head
(2)抓捕:在丝杠带动下,C 形管继续向前运动,并推动心轴压缩第三弹簧继续向前运动。心轴逐渐挤压探针,迫使探针压缩第二弹簧并向外伸出卡住岩心衬管,与此同时,挂盘接触L 形挂钩并推动其绕销轴向外翻转,当挂盘越过挂钩的钩底时,在第一弹簧的作用下回弹并钩住挂盘。此时,探针卡住岩心衬管并通过挂钩和挂盘锁紧,如图8、图9 所示。
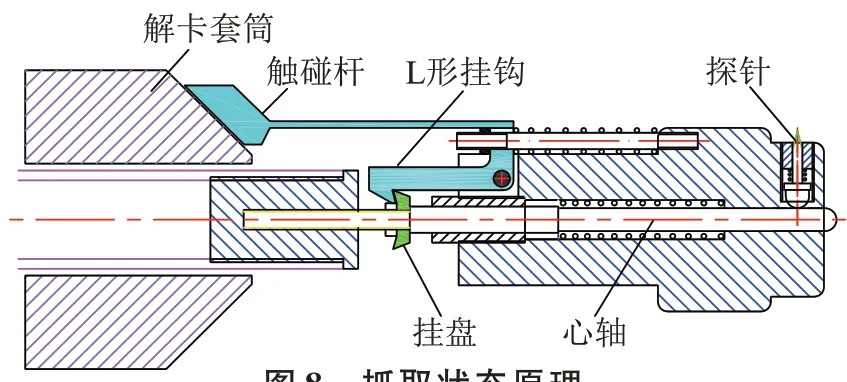
图8 抓取状态原理Fig.8 Grabbing state

图9 抓取状态实物Fig.9 Photo of the grabbing state
(3)回拖:启动驱动部件的电机反挡,随着丝杆的旋转,C 形管带动抓捕头部件和岩心衬管及其内部的岩心一起回拖。当岩心衬管到达切割器附近时,关闭步进电机,通过手摇的方式使丝杠缓慢旋转,结合切割器的内视系统,可实现岩心衬管的精准定位,随后可进行切割工作。如图10、图11 所示。

图10 抓捕头解卡原理Fig.10 Principle of unlocking of the capture head

图11 抓捕头解卡状态实物Fig.11 Unlocking photo of the capture head
(4)解卡:当切割工作和推送岩心工作全部完成后,反向摇动手轮,带动抓捕头部件移动至最左端,触碰杆与解卡套筒接触,在2 个斜面的错动下,触碰杆和L 形挂钩向外翻转,压缩第一弹簧,挂钩与挂盘脱离,在第三弹簧的作用下,外壳与挂钩相对心轴向右运动,挂钩与挂盘解卡。同时,在第二弹簧的作用下,探针缩回到外壳的径向孔内,抓捕头部件与岩心衬管脱离。
3 室内岩心衬管抓捕实验
完成抓捕机构设计和加工后,通过组装调试,进行了初步的岩心衬管抓捕实验,主要是验证抓捕机构设计是否合理,抓取、拖动、解卡功能是否顺利实现。
岩心衬管抓捕测试用的是外径48 mm、壁厚4 mm 的PVC 塑料管作为衬管,总长2 m,放置在后处理模拟取心筒内,在抓捕端开设探针沟槽和倒角,便于抓捕头进入岩心衬管并抓取,图12 为实验用的岩心衬管。

图12 实验所用的岩心衬管Fig.12 Core liners for experiments
3.1 抓捕头通过性实验
将抓捕头从C 形管卸下,增大抓捕头外壳前端的倒角,连接一个细长杆,如图13 所示,手动拖动抓捕头在岩心处理装置内来回移动,排除抓捕头在装置内出现卡顿的现象。当手动拖动抓捕头没有卡顿时再回装C 形管上,采用电机驱动抓捕头,检查抓捕头在装置内运行情况。

图13 抓捕头安装长杆手动拖动实验Fig.13 Manual drag experiment of the capture head with a long rod mounted
在后处理装置内,经过驱动电机来回反复拖动抓捕头操作,抓捕头可以在装置内顺利前进和后退,不再出现卡顿现象,为后续的抓捕和转移实验奠定了很好的基础。
3.2 抓捕实验
将模拟取心筒与抓捕机构进行对接,进行空管抓捕实验,验证抓捕头能否顺利在沟槽位置卡住岩心衬管,抓取是否牢固。
在抓捕的过程中,由于驱动电机在抓捕头到达抓捕位置后无法自动停止,有时会将抓捕头内的心轴顶过,心轴不回弹,如图14 所示,导致在后续解卡的环节中L 形挂钩不能顺利解卡。通过拆卸检查,找到心轴存在的问题,将心轴前端的斜面距离加长,使探针在收回的时候受到一个斜向的力,辅助心轴回弹。经过修改之后,多次进行抓捕操作,抓捕头工作正常,能牢固地抓取到岩心衬管,在拖动衬管的过程中没有脱卡现象,图15 为实验结束后抓捕头抓取衬管的情况,抓取操作非常成功。
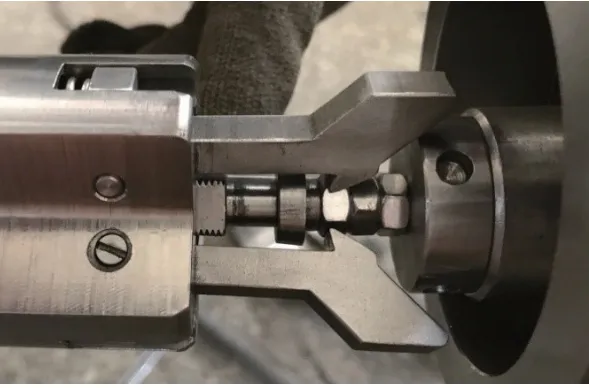
图14 心轴不回弹状态Fig.14 Mandrel without rebounding

图15 抓捕成功状态Fig.15 Proper grabbing
3.3 解卡实验
在成功抓取岩心衬管之后,将抓捕头拉回初始位置,在解卡套筒的作用下,L 形挂钩会向外翻转,在内部弹簧的作用下抓捕头整体回弹,实现解卡。
经过多次的抓捕头拉回操作,解卡套筒工作正常,每次均可以将挂钩与挂盘脱开,内部弹簧也工作正常,解卡实验非常成功。
4 岩心衬管抓捕机构的优点
该岩心衬管抓捕装置用于天然气水合物带压转移系统中,与天然气水合物后处理装置配合使用,为天然气水合物岩心的切割、转移和参数测试服务,可以实现多次抓取。与其他抓取机构相比巧妙地运用了杠杆原理,使结构更加简单,工作状态更加稳定可靠。该装置具有如下优点:
(1)针对岩心衬管与岩心管之间间隙非常小的情况,该装置采用对岩心衬管内抓取的方式,节省了管腔内的空间,大幅度减小了对岩心的扰动。
(2)由于内部结构被外管包围,整个过程属于非可视化操作,采用电机驱动和手摇驱动相配合的方式,在切割器内视系统的辅助下,能实现精准定位,能切割出符合要求的岩心样品长度。
(3)当抓捕头的探针卡住岩心衬管后,挂盘和挂钩处于锁紧状态,在二者的配合下,在拖拉的过程中探针和岩心衬管不易滑脱。
(4)该装置巧妙地利用杠杆原理,在弹簧的配合下能实现自动脱扣,结构简单而且性能可靠。
5 结论与展望
(1)该岩心样品带压转移系统一端通过端面密封的方式,一端通过球阀密封的方式,实现了系统内的保压,能满足带压转移的基本条件。
(2)该岩心衬管抓捕装置采用丝杠驱动的方式,实现了岩心从保压取样筒到切割单元、储存单元的带压转移。
(3)抓捕头设计巧妙,卡取岩心衬管方便快捷,拖拉岩心衬管稳定可靠,解卡方式简单有效。
(4)该岩心衬管抓捕装置已经加工完成,进行了初步的室内岩心衬管抓捕实验,后续将在实际的取心钻具上进行衬管的抓捕转移实验,并在实验过程中继续对装置进行改进优化。
猜你喜欢
化工管理(2022年13期)2022-12-02
中国石油大学学报(自然科学版)(2022年4期)2022-09-05
西南石油大学学报(自然科学版)(2021年3期)2021-07-16
临床肺科杂志(2021年5期)2021-04-27
新能源进展(2021年1期)2021-03-02
科学与财富(2020年27期)2020-11-10
——以双河油田Eh3Ⅳ5-11岩心为例
石油地质与工程(2020年2期)2020-04-17
北京航空航天大学学报(2017年2期)2017-11-24
当代化工(2015年7期)2015-10-21
办公室业务(2015年23期)2015-03-19
