
池塘养殖底污自动清理系统设计与应用
2022-02-15 14:47马晓飞袁永明王芸张红燕沈楠楠
江苏农业科学 2022年2期
马晓飞 袁永明 王芸 张红燕 沈楠楠





摘要:应用PLC可编程逻辑控制器联合自动控制技术,设计并构建一种适用于池塘养殖的具有底污定向沉降、定时吸污、排污与冲洗循环工作等功能的底污自动清理系统,以期能够为池塘养殖水质控制、增产增效提供一定的技术支持。对养殖池塘底部进行积污池硬化改造,配合变频水车式增氧机实现养殖池塘底污定向沉降。选用养殖池塘残饵及粪便自动抽取装置作为积污池底污自动抽取设备,实现养殖底污的高效抽离。使用安装有高密度滤网的高压板式压滤机作为养殖底污固液分离装置,从而实现底泥固化转移和尾水清洁回排。选用西门子S7-200作为系统智能控制器,实现自动设备的周期性定时控制,配合安全稳定的电气控制设备,实现系统硬件设备的自动控制。底污自动清理系统能够保证硬件设备协同工作、有效运转,在养殖试验中取得了优异的应用效果,有效实现了底污定向沉降。通过池塘养殖底污自动清理系统设计与应用,初步实现了池塘养殖底污的定向沉降、底污清理固化转移以及尾水清洁回排,能够有效应用于池塘养殖生产,并为实现池塘养殖自动化与信息化提供技术支持。
关键词:池塘养殖;底污;定向沉降;固液分离;自动控制系统
中图分类号: S969;TP273 文献标志码: A
文章编号:1002-1302(2022)02-0198-08
收稿日期:2021-04-14
基金项目:中国水产科学研究院淡水渔业研究中心基本科研业务费专项资金(编号:2019JBFM07);中央级公益性科研院所基本科研業务费专项基金(编号:2020TD37);现代农业产业技术体系专项“特色淡水鱼产业体系”(编号:CARS-46)
作者简介:马晓飞(1989—),男,山东阳信人,硕士,助理研究员,主要从事渔业经济与信息技术应用研究。E-mail:maxf@ffrc.cn。
通信作者:袁永明,研究员,主要从事渔业经济与信息技术研究。E-mail:yuan@ffrc.cn。
池塘养殖底污主要是养殖过程中残余的饵料、养殖生物排泄物以及残骸在池塘内沉积而产生的污染物,当底污物质在养殖水体过量堆积和分解会抑制水体自净能力,进而导致水质恶化、养殖生物病害、翻塘等严重后果。相关研究表明,养殖池塘中总氮和总磷等污染物主要通过饵料投喂等方式输入,而大部分的氮磷物质最终会在养殖池塘底部沉积[1-3]。除残饵外,养殖生物的残骸及排泄物的绝大部分也会沉积在底泥中,当水体环境发生改变,底泥中的沉积物会分解释放污染物质,导致水质恶化。底污有机物质的不完全分解会释放大量对养殖生物有毒害作用的中间产物,如NH-3-N、NO-2-N、H2S等,会导致养殖生物出现更多的病害。依据相关试验,养殖池塘的底泥沉积物在一个养殖周期内的积累量最高可达1.85×105~1.99×105 kg/hm2,底泥厚度平均每年增加6~8 cm,其中精养池塘、高密度养殖塘以及有生活污水排入的池塘淤泥累积的速度更快。目前,养殖池塘底泥清理主要通过人工或机械清淤作业方式完成[4],人工清淤费时费力且效率较低,而机械清淤成本较高且受池塘地形地貌、作业距离等条件影响较大,现有的机械清污方式只是简单地替代了最原始的人工清污过程,尚不能满足现代化渔业生产的实际需要。因此,开展池塘养殖底污自动清理技术的相关研究并设计开发一种能够有效控制水体污染物定向沉降、泥浆泵设备定时吸污并通过底污固液分离进而实现污泥压滤转移和尾水净化回排的池塘养殖底污自动清理系统,具有一定的必要性和迫切性。
基于上述原因,本研究设计与开发了适用于池塘养殖环境的底污自动清理系统:系统终端控制器选用西门子S7-200系列PLC[5],实现自动设备的周期性定时控制,配合安全稳定的电气控制设备,实现系统硬件设备的自动控制;通过对养殖池塘底部进行积污池硬化改造,系统智能控制变频水车式增氧机实现养殖残饵、粪便等池塘底污向积污池定向沉降;系统定时控制养殖池塘残饵及粪便自动抽取装置作为积污池底污自动抽取设备,实现养殖底污的高效抽离;系统通过控制安装有高密度滤网的高压板式压滤机实现养殖底污固液分离,从而进一步实现底泥固化转移和尾水清洁回排。系统具有精准控制、运行可靠、可移植性高等特点,初步实现了池塘养殖底污的定向沉降、底污清理固化转移以及尾水清洁回排,能够有效应用于池塘养殖生产,并为实现池塘养殖自动化与信息化提供技术支持。
1 系统需求与总体设计
系统需求及设计以罗非鱼高密度池塘养殖为基础,罗非鱼高密度池塘养殖具有养殖密度高、饲料投喂量大等特点,结合试验观察,罗非鱼粪便排出初段具有膜性包被且漂浮于养殖水体[6-8]。罗非鱼高密度池塘养殖底污积累量较大且罗非鱼粪便的初段漂浮特性,适用于池塘养殖底污自动清理系统的有效应用。综合养殖实际需求,开展池塘养殖底污自动清理系统需求分析和总体设计,系统主要包括底污定向沉降控制模块、底污抽取控制模块、固液压滤分离控制模块、系统总控单元以及自动化养殖设备等软硬件功能模块组成。系统涉及自动化养殖设备主要包括变频水车式增氧机、养殖池塘残饵及粪便自动抽取装置(CN201610321045.8)[9]、高压板式压滤机[10]等,养殖设备供电及控制线路接入系统总控制配电箱;系统终端控制器选用西门子S7-200系列PLC(S7-200 CPU224 XP AC/DC/RELAY),该类型PLC控制器标配有继电器输出10组、光电隔离型开关量输入14组、2路支持 ModBus-RTU 协议的RS-485通信口并内置万年历及实时时钟,满足系统控制输出、反馈信号输入及通信需求,终端控制器通过DTU模块同物联服务器进行通信和数据传输[11]。终端控制器作为养殖现场控制中心,能够有效协调系统软硬件设备协同工作,通过多设备控制与反馈输入协作保障底污定向沉降、底污抽取以及固液压滤分离等各项控制和监测反馈功能的实现。
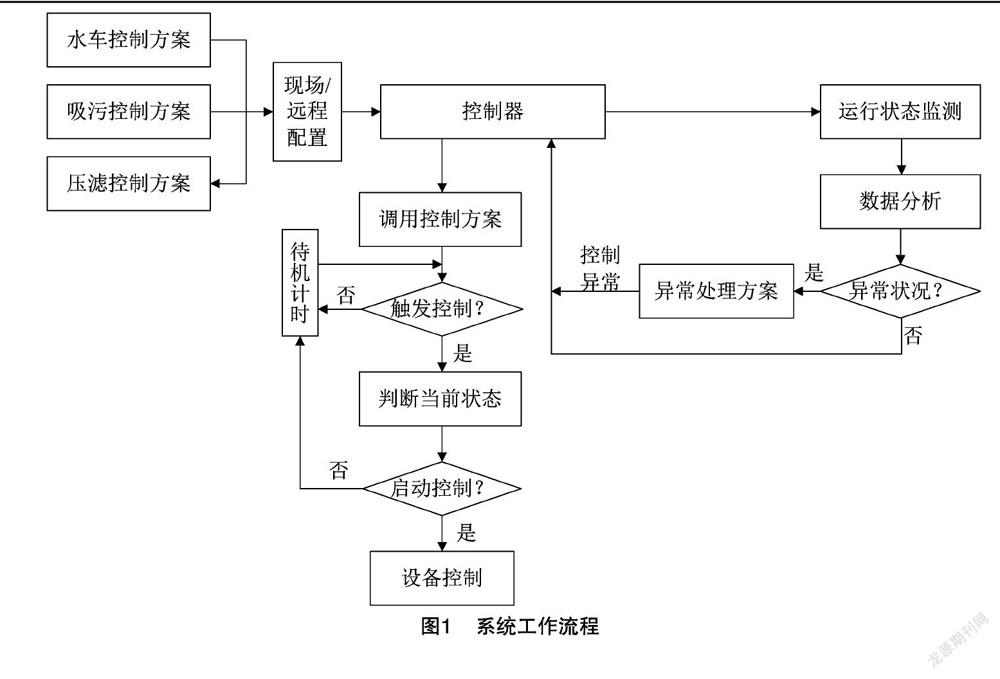
系统运行时,用户通过现场配置终端将系统运行控制方案录入系统终端控制器;系统使用过程中,终端控制器通过控制变频水车式增氧机实现养殖残饵、粪便等池塘底污向积污池定向沉降,在沉降池废弃物累积量达到设定阈值或定时器达到设定定时运行周期时,控制器控制养殖池塘残饵及粪便自动抽取装置运行,通过吸污管吸污以及冲洗管对周围积污的反冲洗实现养殖底污的高效抽离,系统通过控制安装有高密度滤网的高压板式压滤机实现养殖底污固液分离,从而进一步实现底泥固化转移和尾水清洁回排。系统控制流程见图1。
2 系统设计与开发
2.1 系统硬件设计与集成
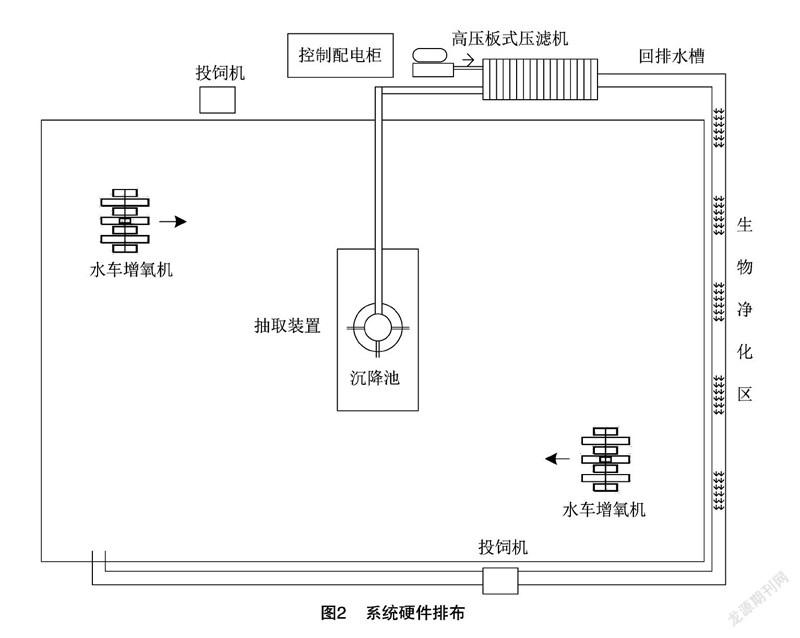
系统硬件设备主要包括总控制配电箱、水车式增氧机、养殖池塘残饵及粪便自动抽取装置、高压板式压滤机等,系统由主控制器控制运行流程,各设备之间分工协作、有效保证系统的稳定高效运转。系统硬件设备排布平面(非等比例)见图2。
系统控制配电箱负责系统设备的配电管理,通过智能控制器协调控制各个系统硬件设备的有效运转;选取池塘上风口及对角位置安装水车式增氧机设备,通过变频控制技术由控制器控制水车式增氧机运行速度、引导水体悬浮物定向沉降;前期池塘改造过程中,在2组水车式增氧机水流转向交汇处设置沉降池,将养殖池塘残饵及粪便自动抽取装置安装在沉降池内并由控制器控制设备的正常运行、吸取附近沉降物并反冲洗周围沉积物;将成套高压板式压滤机设备安装固定在岸边平整基础上并连接进排水管道设施,完成抽取泥浆的固液分离以及尾水回排。
2.2 系统功能设计及实现
系统主要包括定向沉降、底污抽取、固液分离、现场配置及报警等功能模块,系统控制器的各个功能模块分别完成相关硬件设备的状态监测及智能控制。根据系统主要功能需求,选择西门子S7-200 系列小型可编程逻辑控制器(PLC)作为系统主控制器[12-14],具体型号为 CPU224XP AC/DC/RLY,该型号PLC控制器具有14 路开关量输入和10路继电器输出,并配有2 路模拟量输入和1 路模拟量输出,采用2口RS232/485 通讯,支持PPI、ModBus、MPI 以及自由口通讯协议;选用EM 223-4DI/4RLY扩展模块作为变频水车式增氧机和高压板式压滤机设备的扩展控制和检测模块;基于西门子 S7-200 系列PLC,选取兼容西门子TD-200系列单色文本显示屏作为现场配置终端,使用西门子STEP 7-Micro/WIN V4.0.9及耐特TP-200 V4.7.9 作为PLC及显示屏开发平台进行系统控制器功能设计及软件开发。
2.2.1 定向沉降功能
河流及池塘悬浮物沉降和底泥再悬浮沉降的相关研究表明:在水体流动条件下,底泥沿主流方向呈曲线渐减分布,且主要集中在进水口1/3范围内[15];风向对底泥分布影响不明显,水体流动转向及循环离心作用是造成外侧沉积物较多的重要原因[16];悬浮物沉降及底泥再悬浮具有一定的起动流速,不同的流速能够影响悬浮物的扩散和沉降范围[17];在一定流速条件下,底部水平面的沉降通量呈现先增加、后稳定的变化趋势,底泥再悬浮的悬浮通量总量随流速增大而增加,且中高流速条件下再悬浮通量增长迅速[18]。
基于上述原理,使用变频控制技术实现水车式增氧机的转速调控,从而保证水体流动具有一定的流速,并结合池塘环境因素控制水流自循环拐点,能够有效实现池塘悬浮物的定向转移沉降,将40%以上残饵、粪便等悬浮物定向转移至沉降池附近完成沉降。系统使用2台EM 223-4DI/4RLY扩展模块作为变频水车增氧机的控制和状态监测模块:通过4路数字量输出共7段速控制变频器调速运行,其中Q3.0、Q4.0分别控制变频器启动,Q3.1-Q3.3、Q4.1-Q4.3控制运行速度;使用1路数字量输入(I3.0、I4.0)监测变频器运行状态,并通过判断输入状态异常进行故障报警。控制器控制水车式增氧机转速,以推动水体悬浮物定向沉降,通过现场手动控制实现水车式增氧机全速运行以完成应急增氧功能(图3)。
水车增氧机变频控制的激发动作主要是定时器,水产增氧机高速运转定时器设置由养殖对象的投饲时段以及集中排便时间段决定。根据传统池塘养殖经验,在每次投喂结束0.5 h左右开启水车式增氧机,在养殖对象的排便高峰时间段(以吉富罗非鱼为例,每天20:00—21:00[19])开启水车式增氧机,推动残饵和粪便定向沉降,单次运转时长根据养殖对象生长阶段和当日投喂量由用户设置;普通时间段,水车式增氧机保证中速运行,保障池塘水体内循环流动,用户也可以为系统配置水质监测设备,根据池塘水质状况联动控制水车式增氧机应急增氧。
2.2.2 底污抽取及反冲洗控制功能
现阶段池塘底泥废弃物清理主要在养殖过程完成后采用清塘方式进行[20],而养殖过程中池塘底层废弃物清理难度较大,一般使用泥浆泵等设备在重点区域进行抽取并通过沉淀、过滤等方式进行转移[4]。而现有的泥浆泵只能采集抽取较小范围内底层废弃物且不能够实现自动化采集控制,采集清理效率较为低下。
针对上述问题,选用具有自主知识产权的《一种养殖池塘残饵及粪便自动抽取装置》(ZL201610321045.8,图4)作为底污抽取及反冲洗装置,将装置安装放置在沉降池底部中心位置,通过控制器控制装置运行实现底污抽取及反冲洗功能。对于底污抽取及反冲洗装置,控制器控制对象主要包括泥浆泵、排污电动球阀、清洗电磁阀等,系统使用控制器CPU自带数字量输入和继电器输出模块作为装置控制和状态监测模块。使用Q0.0、Q0.2分别连接高负载中间继电器控制2组清洗电磁阀,使用Q0.1、Q0.3直接控制清洗电磁阀故障报警信号灯,使用Q0.4连接中间继电器控制排污电动球阀、Q0.6控制排污球閥故障报警信号灯,使用Q0.7连接交流接触器控制泥浆泵、Q1.1控制泥浆泵故障报警信号灯;使用I0.0监测系统运行状态、I0.1、I0.2监测清洗电磁阀状态、I0.3监测排污球阀状态、I0.4监测泥浆泵状态。
底污抽取及反冲洗控制的激发动作为控制器内置万年历,用户根据养殖对象不同生长阶段的生理状态,设置底污抽取及反冲洗控制的激发周期和单次运转时长。运行时,系统判断控制器输入输出状态,无故障和输出状态条件下,开启排污阀并获取排污阀状态输入,延时15 s开启泥浆泵,定时30 s排空管道内前次净水;30 s抽泥定时器运行,关闭排污阀和开启反冲洗电磁阀并判断对应状态,15 s反冲洗定时器运行,开启排污阀和关闭反冲洗电磁阀并判断对应状态,根据用户设置的单次吸污时长确定抽泥定时器-关/开阀-反冲洗定时器-开/关阀流程的循环次数;吸污循环结束,关闭泥浆泵,延时15 s关闭排污阀,单次底污抽取及反冲洗控制结束,功能模块进入待机状态。
2.2.3 固液分离压滤功能
对于养殖过程中以任何方式抽取出的底泥及废弃物以及在1个或多个养殖周期结束后通过干塘、冲刷抽取或挖掘等手段转移出的池塘淤积底泥,都需要在岸基进行固液分离以便于转移,而目前对于池塘底泥固液分离的主要方法仍然是自然晾晒,即移出池塘堆放在闲置土地上,通过风吹、日晒、自然下渗等物理过程使池塘底泥水分自然蒸发[21-22]。该方法虽然操作简单、后续处理方便,但受到土地、天气等诸多因素限制,自然脱水周期长、实际施工难度大。
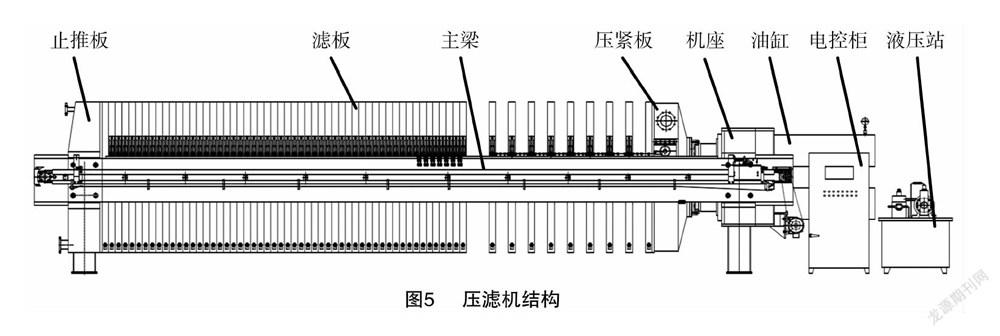
高压板式压滤机(图5)是一种固液分离机械设备[23],适用于难以分离的细黏性物的过滤,目前在河道清淤、污水处理等领域普遍应用。池塘养殖底污自动清理系统使用TJYZ40/1000型小型高压板式压滤机,该压滤机配备有效压滤面积为20 m2的4218丙纶滤布、重力自由出液、滤饼厚度40 mm、最大处理量为2~3 t/h、额定功率13.0 kW,并配套有电控设备。对于压滤机,池塘养殖底污自动清理系统主要通过同压滤机配套控制器的通信来控制及监测压滤机的正常运行并输出故障报警信息。
固液分离压滤控制的激发动作分为压紧滤板和压滤。当压滤系统为待机状态(滤板分离未压紧)且当前时间距离下次底污抽取及反冲洗控制启动时间为30 min时,激发压紧滤板控制:系统向压滤控制器发送指令,控制液压系统运行将压紧板向止推板方向移动,将全部滤板压紧,等待泥浆由进料口输送入滤室,开始固液分离压滤控制周期。压滤的激发动作是压滤机进料口压力信号,当进料口泥浆输入压力长时间过大、系统判定压滤机滤板间固体物质达到累计上限,启动压滤控制:系统控制器控制关闭进料阀门,使用空气压缩机为滤室加压并实时监测压力,压滤过程所需时间根据池塘泥浆特性和脱水要求进行设定,达到规定压滤时间,停止加压,打开进料阀门,完成压滤过程;控制液压系统将压紧板退回起点,控制压滤机传动装置拉开滤板,使滤饼自由脱落,将滤饼转移利用,压滤系统进入待机状态。
3 系统应用
池塘养殖底污自动清理系统开发集成完成后,应用于高密度罗非鱼池塘养殖生产,实现池塘养殖底污定向沉降、抽取以及固液压滤分离等各项功能的控制和监测反馈。
根据养殖生产实际情况并结合系统设计及硬件集成要求:在试验开始前,在池塘中心位置设置长4 m×宽4 m×深1 m的水泥固化沉降池,并安装固定成套养殖池塘残饵及粪便自动抽取装置,将泥浆输送管路沿池底排布至岸基并连接增压泵,用于底污自动抽取及反冲洗应用测试;为应用试验池塘配置2台2.2 kW水车式增氧机,并配备冗余功率变频控制器,用于系统定向沉降功能的应用测试;在岸基硬化平台上安装成套高压板式压滤机设备,用于系统固液分离功能的应用测试;在压滤机滤出液排液孔下布置导流水槽,将滤出液导流入岸边回排水槽,通过多级生物净化后回排入养殖池塘,通过检测滤出液和回排液体水体指标,测试系统固液分离及净化效果。
根据系统应用试验需求,于2019年6月至2020年9月在海南省海口市三江镇罗非鱼养殖场开展罗非鱼池塘养殖底污自动清理系统应用试验,试验池塘面积约为3 335 m2(约80 m×40 m),池深2.0~2.5 m,底铺地膜防止渗漏。6月初放养 3 cm/尾,罗非鱼苗8 000尾/667 m2,罗非鱼每天投喂2次,分别为08:00—09:00、17:00—18:00,每日饲料投喂量占鱼体质量3%~5%,视罗非鱼摄食情况及天气、水质等情况适当增减。养殖全程约 168 d,根据系统应用试验要求,养殖前期(约60 d)罗非鱼规格较小、投饲量及排泄量较少,主要进行残饵、排泄物沉降规律以及定向沉降技术应用试验;养殖后期(约100 d)投喂量和排泄量显著增加,开展系统底污抽取及固液分离功能应用试验。
残饵、排泄物沉降规律以及定向沉降应用试验中,根据水车式增氧机转速及变频器频率设置4组对照(频率为0、30、40、50 Hz,水车式增氧机额定功率2.2 kW),使用活塞式底泥采样器分别在水车式增氧机水流方向区域内采样,采样时间为当日每次投饲结束1 h和当日22:00,通过测量采样管内残饵及排泄物累积厚度初步确定采样点沉积物数量,通過对比不同试验组相对沉积量总结罗非鱼养殖残饵、排泄物沉降规律并确定实现定向沉降的水车式增氧机运行频率。
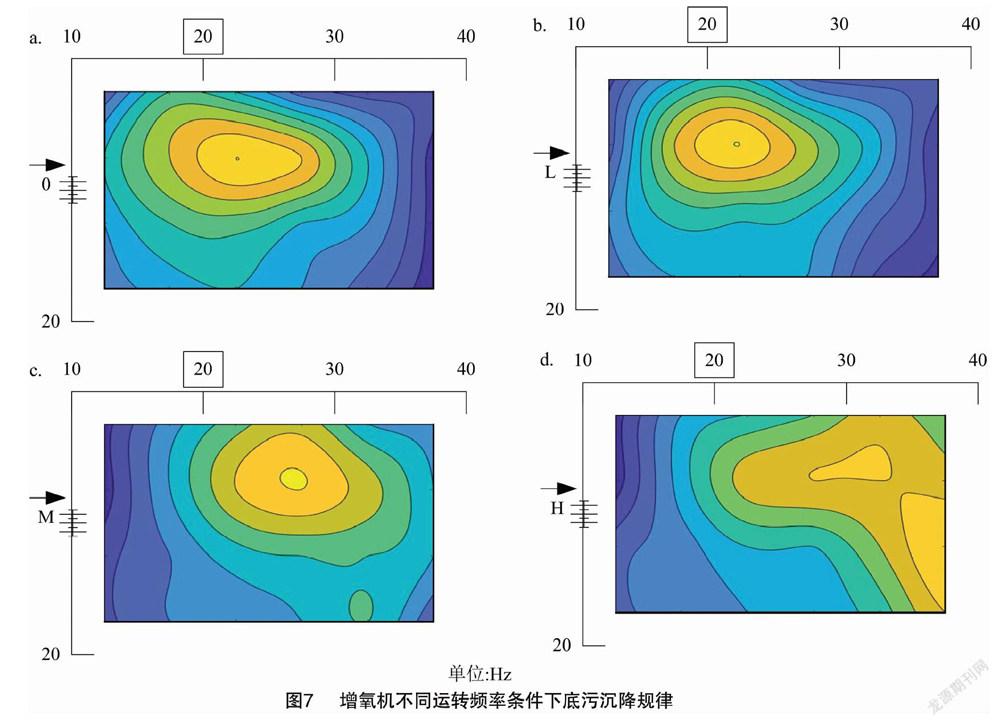
根据养殖池塘面积将池塘划分为80 m×40 m坐标系,其中投饲机安装位置坐标为(20,0),水车式增氧机的安装位置坐标为(10,10),在水车式增氧机后端划定30 m×20 m区域为沉积物采样区域,使用样方法采样,将采样区域等面积划分为24个样方,单样方面积25 m2,选取样方中心位置为采样点位,沉降试验采样位点坐标图见图6;设置4组水车式增氧机不同运转频率条件下的底污沉降对照试验,使用活塞式底泥采样器采集底泥样品,测量采样管内残饵及排泄物累积厚度,4组试验的残饵、排泄物等底污沉降规律见图7。
从图7-a可以看出,由于长期定点投喂对罗非鱼摄食习惯的训练养成,残饵及排泄物等底污主要沉积在投饲区域附近。预试验发现,变频器输出频率低于 25 Hz 时,水车式增氧机推流作用不明显,故试验设定30 Hz为低频率,50 Hz为民用供电的最大频率,取二者平均值40 Hz作为试验的中间频率;在水车式增氧机低频率工作时(图7-b),沉降总体规律变化不明显,但外围沉积有向水流方向变化趋势,表明沉积物的沉降转移需要一定的启动流速,2.2 kW水车式增氧机在30 Hz时,流速未达到启动速度;中频率工作时(图7-c),底污沉降发生较为明显的右移,受池内水流小循环的影响,沉积物外围向右上和右下方位扩散;高频率工作时(图7-d),底污沉降右移明显,沉积物受回流水流离心力作用在外围较为集中沉降。
使用活塞式底泥采样器采集沉降池内底泥,观察底泥采样厚度超过200 mm时,开展系统底污抽取及固液分离功能应用试验,使用养殖池塘残饵及粪便自动抽取装置抽取底泥废弃物并反冲洗吸空部位提高吸污效率,吸取出的泥浆通过加压泵直接输送进入压滤机滤室进行重力式自然过滤,多次输料直至进料口压力过限,压滤机加压过滤并脱离泥饼,滤液由排液龙头排出并进入多级生物净化水槽。固液分离效果见图8。
养殖池塘残饵及粪便自动抽取装置能够将装置安装范围内85%以上的底泥废弃物抽取并输送入压滤机设备,受限于养殖水质要求,泥浆不能够添加絮凝剂、固化剂等化学制剂,导致压滤效率较低,需要多次抽取泥浆并加压过滤;壓滤完成后,泥饼为含水率60%~65%的塑化状态,成型且不易流动,有效降低了转移难度;压滤后滤液清澈、无异味,固液分离主要水化因子测量方法参照文献[24],对比泥饼、滤液及净化回排水的水化因子指标表明,固液分离及净化回排能够较为有效地降低水体有机质、总磷、总氮等指标含量(表1)。
4 结论与讨论
通过池塘养殖底污自动清理系统在罗非鱼高密度养殖完整周期的应用,系统各项功能基本满足各项需求和技术设计要求。系统变频控制水车式增氧机能够初步实现残饵、排泄物等养殖废弃物的定向沉降,便于废弃物的抽取转移和固液分离,保证了罗非鱼摄食和聚集区域的水体质量稳定;系统控制底污抽取及固液分离,能够及时转移残饵、排泄物等沉积物, 对于池塘底泥生态平衡具有一定作用,滤液净化回排符合零排放的绿色养殖要求,沉积物的高效转移能够为养殖生产提供创收手段。
系统应用试验的有效开展,在验证系统功能有效性基础上,在运行稳定性、便利性和智能化等方面仍然存在一定的改进和优化空间,以适应更加广泛的养殖模式和生产应用场景;通过系统的设计、开发和应用,对于池塘残饵、排泄物沉积规律进行初步总结并对定向沉降技术进行初步探索,以期通过更多养殖模式、养殖品种的重复试验,总结更为普适的养殖沉降规律,为更加智能化的养殖控制提供技术参考和支持;信息技术和智能化技术手段应用于水产养殖生产需要进行适用化改造和较大规模的应用示范,实现水产养殖信息化、现代化、智能化,具有广阔的发展空间和应用前景。
参考文献:
[1]孟顺龙,胡庚东,瞿建宏,等. 单养模式下罗非鱼亲本培育塘的沉积物产污系数初探[J]. 农业环境科学学报,2010,29(9):1795-1800.
[2]苗卫卫,江 敏.我国水产养殖对环境的影响及其可持续发展[J]. 农业环境科学学报,2007,26(增刊1):319-323.
[3]裘丽萍,李志波,宋 超,等. 罗非鱼池塘养殖周期沉积物理化指标的变化规律研究[J]. 中国农学通报,2015,31(29):23-27.
[4]杨正锋,王 坤. 池塘清淤改造的意义、存在问题及对策[J]. 中国水产,2011(6):32-34.
[5]张红燕,袁永明,马晓飞,等. 南美白对虾池塘养殖水质智能控制系统设计与开发[J]. 中国农学通报,2020,36(11):130-135.
[6]肖 炜,李大宇,邹芝英,等. 海南地区鱼虾混养模式下密度对罗非鱼的生长、代谢和免疫的影响[J]. 淡水渔业,2019,49(2):101-106.
[7]陈家捷,谭洪新,于忠利,等. 罗非鱼粪便在分解过程中形态和营养成分变化[J]. 水产科学,2015,34(10):634-639.
[8]史磊磊,范立民,陈家长,等. 不同摄食状态罗非鱼养殖水体微生物群落功能多样性初探[J]. 中国农学通报,2018,34(5):147-152.
[9]袁永明,马晓飞,张红燕,等. 一种养殖池塘残饵及粪便自动抽取装置:201610321045.8[P]. 2016-07-27.
[10]陈科庆,郭望渊. 立式板框压滤机与厢式压滤机脱水机理对比研究[J]. 中国设备工程,2019(22):230-232.
[11]沈楠楠,袁永明,马晓飞. 基于水产物联服务平台的智能增氧控制系统的开发[J]. 农业现代化研究,2016,37(5):981-987.
[12]Guo F T,Liu X H.The design of communication protocol for monitoring S7-200 PLC[J]. Journal of Simulation,2015,3(4):3-5.
[13]向晓汉. 西门子S7-200PLC完全精通教程[M]. 北京:化学工业出版社,2014.
[14]Mazek K,Chmiel M,Kulisz J.A PC-based operator and diagnostic panel for Simatic S7-200 programmable controllers[J]. Archives of Electrical Engineering,2013,62(2):307-320.
[15]马 民,陈小庆,刘哲人,等. 严寒地区稳定塘底泥沉积规律及其影响因素[J]. 武汉城市建设学院学报,1997,14(2):29-33.
[16]Dinn P M,Johannessen S C,MacDonald R W,et al. Effect of receiving environment on the transport and fate of polybrominated diphenyl ethers near two submarine municipal outfalls[J]. Environmental Toxicology and Chemistry,2012,31(3):566-573.
[17]Hunt C D,Mansfield A D,Mickelson M J,et al. Plume tracking and dilution of effluent from the Boston sewage outfall[J]. Marine Environmental Research,2010,70(2):150-161.
[18]李 勇,张振廷,花剑岚,等. 排污流速比对河流水体中悬浮物沉降和底泥再悬浮的影响[J]. 河海大学学报(自然科学版),2015,43(3):189-196.
[19]刘 伟,文 华,蒋 明,等. 吉富罗非鱼成鱼对8种常见植物源饲料原料的表观消化率[J]. 西北农林科技大学学报(自然科学版),2015,43(4):17-25.
[20]郭延莉. 基于水产养殖池塘底质的改良完善措施[J]. 黑龙江水利科技,2012,40(8):72-73.
[21]詹锐生. 高压压滤脱水固结一体化处理河道淤泥的技术应用研究[D]. 广州:华南理工大学,2019:3-10.
[22]杨柳燕,赵兴青,肖 琳,等. 沉积物总氮、总磷联合测定分析方法:CN1869656A[P]. 2006-11-29.
[23]Heiri O,Lotter A F,Lemcke G. Loss on ignition as a method for estimating organic and carbonate content in sediments:reproducibility and comparability of results[J]. Journal of Paleolimnology,2001,25(1):101-110.
[24]中国标准出版社第二编辑室.环境监测方法标准汇编:水环境[M]. 2版.北京:中国标准出版社,2010.
猜你喜欢
河北渔业(2016年12期)2017-01-11
企业技术开发·下旬刊(2016年11期)2016-12-27
电子技术与软件工程(2016年22期)2016-12-26
现代农业科技(2016年20期)2016-12-20
科技视界(2016年14期)2016-06-08
科技视界(2016年11期)2016-05-23
河北渔业(2015年2期)2015-03-26
