
基于碟刹与STM 芯片的智能婴儿车刹车系统研究
2022-02-14 03:15:24张铁权
沈阳工程学院学报(自然科学版) 2022年1期
张铁权
(沈阳工程学院 自动化学院,辽宁 沈阳 110136)
市场上主流的婴儿车主要以手动方式刹车。通过对婴幼儿监护人的调查,部分监护人在离开婴儿车5 m~10 m 时,没有锁婴儿车的习惯。当婴儿车行驶在陡坡时,如果监护人意外松手,婴儿车会出现“溜车”情况。这些都会造成极大的安全隐患。针对这种问题,本文设计一种基于碟刹与STM 芯片的智能刹车系统,能够实时监测监护人双手是否在婴儿车上,从而进行智能刹车。为了提升婴儿车的舒适度,刹车系统采用了碟刹装置,降低了婴儿车刹车时的顿挫感。智能婴儿车刹车系统能够有效弥补手动刹车的不足,最终达到“松手即停,推车即走”的效果,提高了婴儿车的安全性及稳定性。该项技术实现原理简单,技术可行,成本开销小,并且符合人们的安全观念及大人推车的行为习惯。这也将会成为未来智能婴儿车发展的方向。
1 智能婴儿车刹车系统设计
1.1 硬件设计方案
硬件设计部分主要分为两类:外围电路设计和机械设计。外围电路设计主要包括STM 芯片GPIO 输出、输入的排线方式设计,STM 芯片控制继电器电路设计,人体识别电路设计和电机正反转电路设计。机械设计主要包括碟刹片与碟刹器的安装与调试、电机的固定、制动系统的安装。
1.1.1 外围电路设计
外围电路由12 V 直流电源供电,分为5 个部分:人体识别模块、输入信号放大模块、输出信号放大模块、芯片的供电与排版、电机电路以及终止信号的连接。
1)人体识别模块设计
设计电路如图1 所示,该电路主要采用串联分压进行信号识别。人体电阻大约为1 M~2 M,与10 M 电阻串联,通过5 V 电压供电。当人体不接触手柄时,接入放大电路的电压大约在4.3 V;当人体接触手柄时,通过串联分压与电路损耗,接入放大电路的电压大约在0.5 V 左右。根据接入放大电路电压的不同,实现了对人体触摸的识别。
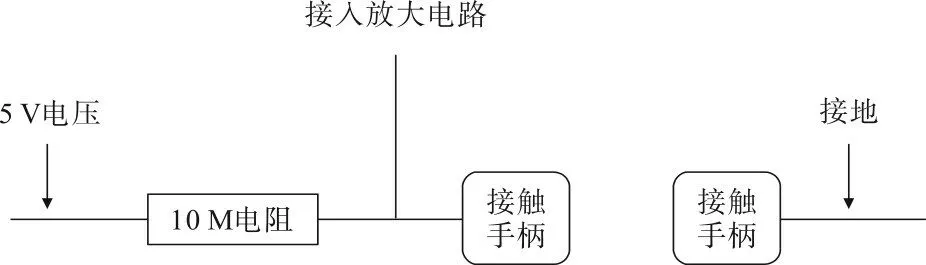
图1 人体识别电路模块
2)输入信号放大模块
该模块通过三极管对人体识别模块产生的信号进行放大,达到STM 芯片可以识别的电流,将该电流输入到STM 芯片指定的GPIO 端口,最终达到人体信号识别的效果。
3)输出信号放大模块
输出信号放大电路如图2 所示,主要将STM芯片输出的信号进行放大,增加驱动能力,控制继电器的工作状态,进而控制电动机的正反转,实现刹车的锁合。
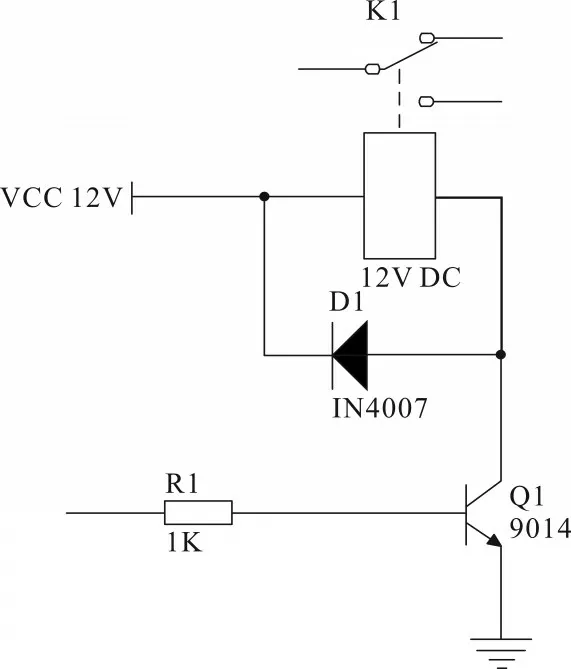
图2 输出信号放大电路
4)芯片的供电与排版
该部分设计采用STM32F103 集成芯片,具有5 V 和3.3 V 两种供电方式。设计方案由12 V 直流电源供电,通过“12VDC 转5VDC”变压器向STM芯片供电。将STM 芯片、人体识别模块、输入信号放大模块和输出信号放大模块焊接在电路板上,继电器、电动机、接触手柄通过PCB 接线端进行连接。
5)电机电路以及终止信号的连接
该部分设计采用直流电机连接碟刹系统,接入电机的电流方向控制电机的正反转。两个继电器的输入与12 V 电源连接,输出与直流电机相连,达到通过继电器的通断来控制电机正反转的效果。终止信号连接到碟刹系统中的电机电路,在刹车过程中,当刹车锁死时,电机电路向STM 芯片传递锁车终止信号,使直流电机停止工作;在解锁过程中,达到完全解锁状态时,电机电路向STM 芯片传递解锁终止信号,使直流电机停止工作。
1.1.2 机械设计
智能婴儿车的机械设计如图3 所示,将碟刹片与车轮固定,碟刹器固定在车架上,与碟刹片共同构成碟刹系统。直流电机固定在车架上,通过刹车线与碟刹器相连,控制刹车的闭合。
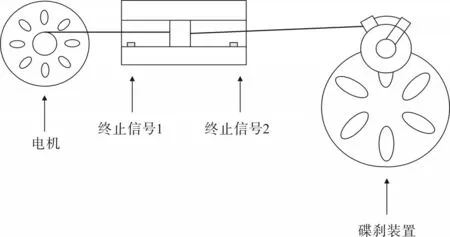
图3 智能婴儿车的机械设计
1.2 软件设计方案
软件设计部分主要为人手识别模块的软件程序编写,信号输出模块以及终止信号的软件程序编写。通过软件程序可以达到人体接触手柄、碟刹解锁、无人体接触和碟刹锁车的效果。智能婴儿车的程序流程如图4所示。

图4 智能婴儿车程序
人手识别部分选用GPIOA^0 端口,设置为下拉电阻状态。该模块分为判断人手是否识别,延时消抖,再次判断人手是否识别3 个部分。通过if 语句判断人手是否识别;利用delay 延时函数进行延时消抖。通过该模块,可以准确识别输入信号。
选用GPIOC^13、GPIOC^14 作为输出端口,GPIOB^12、GPIOB^13 作为终止信号端口。首先通过if语句判断是否存在输入信号,当输入信号存在时,再次使用if语句判断是否存在终止信号1;当输入信号不存在时,再次使用if语句判断是否存在终止信号2。当终止信号1 存在时,令GPIOC^13、GPIOC^14 全部关闭;当终止信号1 不存在时,令GPIOC^13、GPIOC^14 中控制解锁的端口输出高电平,另一端口输出低电平。当终止信号2 存在时,令GPIOC^13、GPIOC^14 全部关闭;当终止信号2 不存在时,令GPIOC^13、GPIOC^14 中控制锁车的端口输出高电平,另一端口输出低电平。最终达到“松手即停,推车即走”的效果。
2 实验结果分析
对设计的智能婴儿车刹车系统进行人手识别测试,终止信号测试,速度、重量与刹车时间测试,速度、重量与刹车距离测试。
2.1 人手识别测试
在测试中,当人体接触手柄时,系统会在1 s内做出反应,并且在长达30 min 内无操作的情况下,输入信号没有产生变化,人手识别部分测试符合最初设想。因此,该部分模块能够准确地识别出人手是否接触手柄,并能实现相应的功能。测试结果如表1所示。
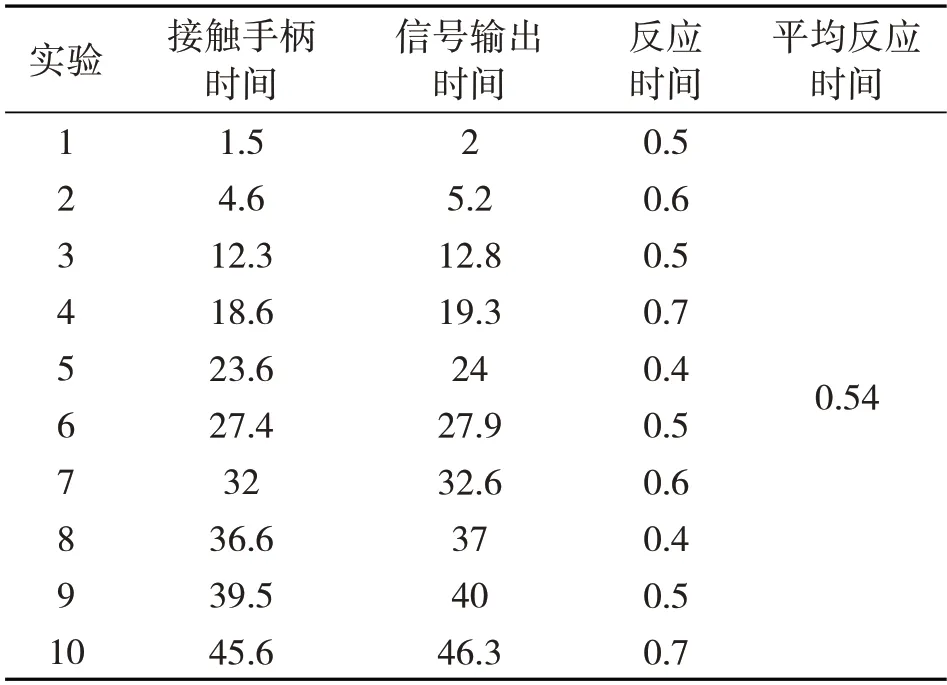
表1 人手识别测试结果 s
2.2 终止信号测试
在终止信号测试中,终止信号能够及时传入系统芯片中,使直流电机停止运行,令碟刹处于设定好的刹车或解锁状态,终止信号测试符合最初设想。因此,该模块能够准确地判断碟刹系统是否锁死,是否达到完全解锁状态。当锁死或者完全解锁时,系统能够及时停止信号的输出,使刹车强度固定在两个极限值。测试结果如表2所示。
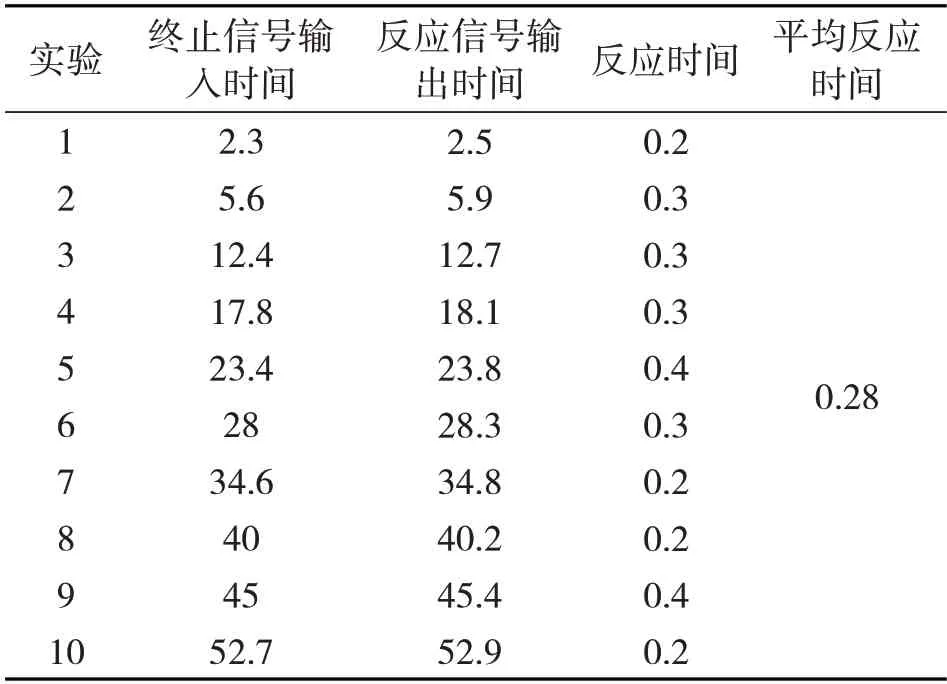
表2 终止信号测试结果 s
2.3 速度、重量与刹车时间测试
这组实验能够测试出实际应用中系统从刹车开始到结束的具体刹车时间。在测试中,分别取两组数据20 kg、5 km/h~32 km/h 和10 kg~30 kg、15 km/h 对婴儿车进行测试,得到两组测试结果,如表3 和表4 所示。速度、重量与刹车时间测试符合最初设想。
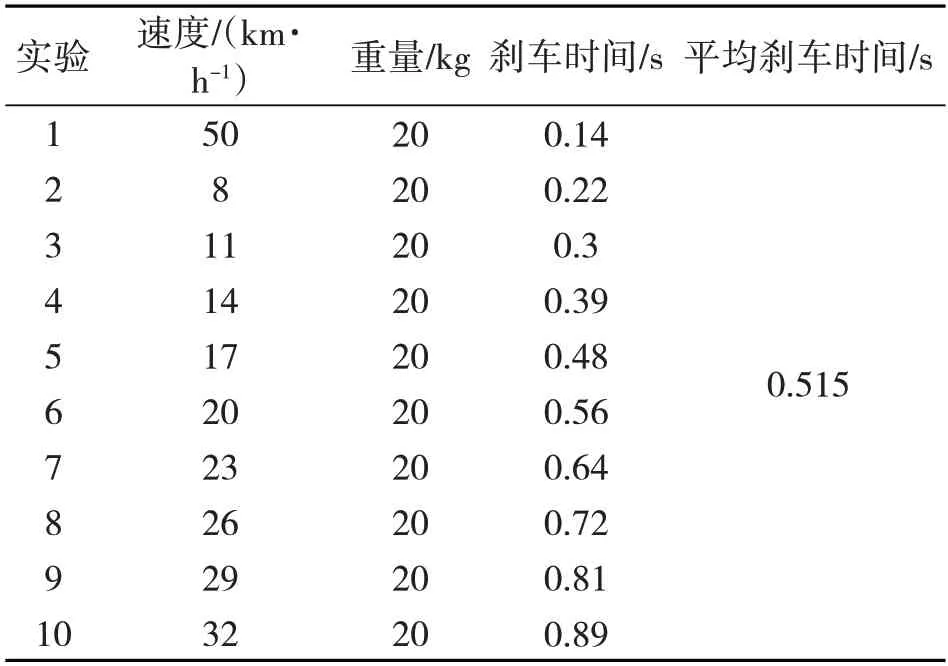
表3 速度、重量与刹车时间测试结果1
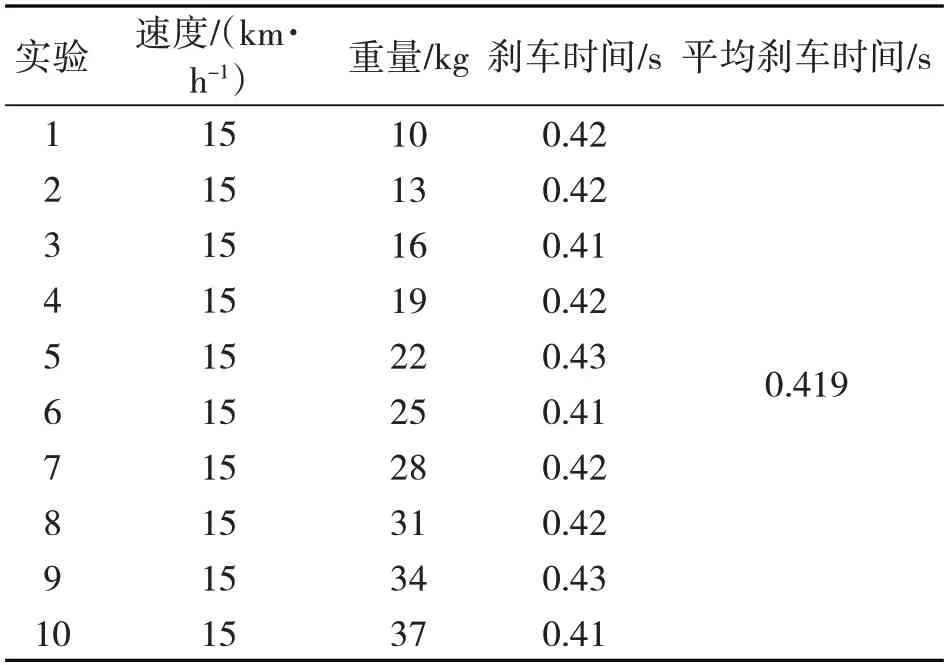
表4 速度、重量与刹车时间测试结果2
2.4 速度、重量与刹车距离测试
这组实验的目的是测试在实际应用中该系统从开始刹车到刹车结束的刹车距离。在测试中,取上一节中的数据对婴儿车进行测试,得到两组测试结果,如表5和表6所示。速度、重量与刹车距离测试符合最初设想。
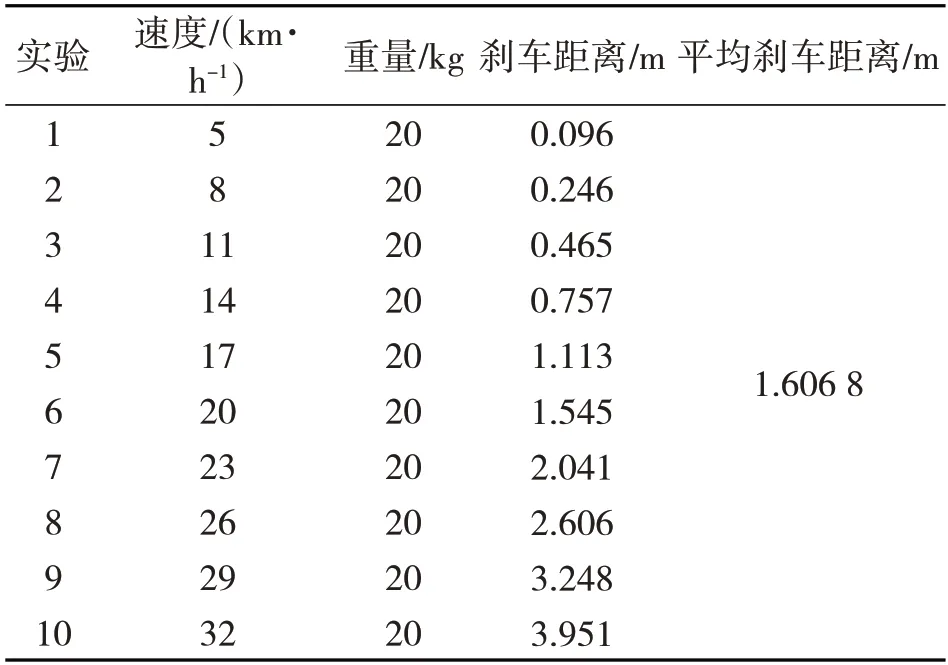
表5 速度、重量与刹车距离测试结果1
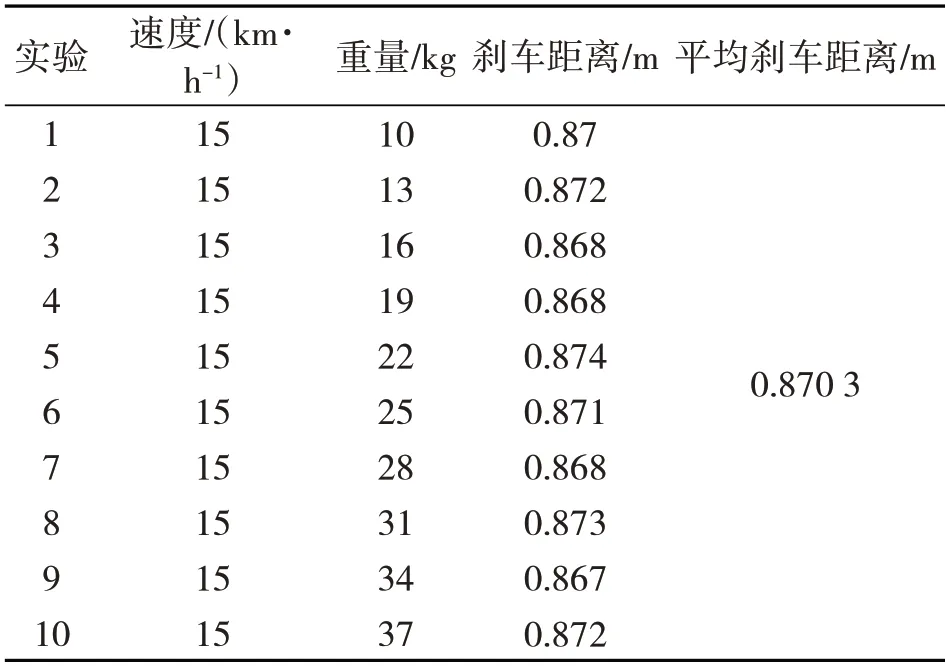
表6 速度、重量与刹车距离测试结果2
以上测试结果充分说明,本文设计的智能刹车婴儿车相比于普通婴儿车具有较高的安全性及舒适性。
3 结语
针对婴儿车安全性问题,本文从电路设计、机械设计及软件设计3 个方面研究了基于碟刹与STM 芯片的智能婴儿车刹车系统。实验数据表明,本文研究的智能刹车系统能够使婴儿车在安全性和稳定性方面得到保障。
本文的设计原理简单,技术可行,成本开销小,非常符合人们的安全观念。从监护人推车的行为习惯入手,最终达到“松手即停,推车即走”的智能效果。同时,该设计可移植性强,能够推广至各类婴儿车。因此,本文设计的智能刹车系统极具推广价值,将会得到非常可观的经济效益,也为未来的智能婴儿车发展提供理论依据和实践指导经验。
猜你喜欢
学生天地·小学低年级版(2018年5期)2018-09-13 10:10:32
发明与创新(2016年23期)2016-10-13 02:16:14
湖北工业大学学报(2016年5期)2016-02-27 13:14:51
科普童话·百科探秘(2015年6期)2015-10-13 07:05:15
伴侣(2015年5期)2015-09-10 07:22:44
大众科学(2015年10期)2015-09-10 07:22:44
中学科技(2015年7期)2015-07-03 05:57:13
好孩子画报(2015年7期)2015-05-30 10:48:04
中国自行车·骑行风尚(2014年2期)2014-05-07 18:15:21
河南科技(2014年10期)2014-02-27 14:09:18
