
油气场站自动化巡检机器人系统设计
2022-02-13 11:53王仕强余昭江袁建军管仁明何莎于佩航冯晓辉
科学技术与工程 2022年36期
王仕强, 余昭江, 袁建军*, 管仁明, 何莎, 于佩航, 冯晓辉
(1.中国石油集团川庆钻探工程有限公司安全环保质量监督检测研究院, 广汉 618300; 2.上海机器人研究所, 上海 200442; 3.嘉兴高维智控有限公司, 平湖 314200)
石油和天然气是主要的能源供应原料,而油气场站在油气的传输过程中起着重要的中继和管理作用。由于站内存储天然气和石油、完成各流程工艺、人员进出频繁,其总体事故发生率较高,事故危险性也更大,故站场的安全管理是站场运行的重中之重。当前,外国场站无人值守站场发展迅猛。通过站场自动控制和调控中心远控,可实现极少维护人员的站场监控。
油气场站的危险主要分为两类:油气场内的可燃物质的泄露和人员未能正确进行操作,因此针对这两种状况进行自动巡检,可以大大降低场站在运行过程中的安全风险,做到自主检测,自主上报。
Birk等[1]设计了一款变电站巡检机器人,采用基于轨道的路径导航方式,搭载红外热成像仪,并在变电站投入试用。Soldan[2]研制了一款名为RoboGas Inspector的检测机器人,用于在工业自动化环境下的异常检测过程。Bennetts等[3]研发了Gasbot机器人平台并开发一种新型的气体分配算法来生成室内外勘探区域的甲烷浓度图,完成未知区域甲烷泄漏的勘探并定位。祝玉泉等[4]将可调谐二极管激光吸收光谱技术应用于天然气管道泄漏检测及定位上。祖丽楠等[5]针对无人值守的变电站巡检机器人开发了基于视觉和电磁融合的巡检导航机器人。邓斌等[6]研发了声屏障巡检机器人并对其动力学进行分析,能够很好地适应复杂的巡检环境。鲁守银等[7]研发的巡检机器人采用了3D激光雷达、惯性导航和视觉融合技术,利用同时定位与建图(simultaneous localization and mapping, SLAM)技术解决了因环境变换引起的导航定位与地图匹配失败问题。这些检测机器人的出现使得自动巡检技术变得逐渐成熟,但仍然没有见到一款成熟的系统性的针对油气场站环境的巡检机器人。
基于此,设计了油气场站自动化巡检机器人系统,通过设计具有强越障能力的移动底盘,搭载甲烷检测器、拾音器、红外摄像头等多种环境监测传感器,使其能够在现有的油气场站进行无人化的巡检;通过传感器数据处理与预警系统,实时分析油气场站的环境信息并进行报警。以期通过此设备,油气场站可以在无人化的情况下自主安全运行,保障场站和巡检工作人员的安全。
1 整体架构设计
为完成设计目标,该油气场站自动化巡检机器人系统的组成结构如图1所示,详情如下。

图1 油气场站自动巡检机器人系统整体构成Fig.1 The overall architecture of automatic inspection robot systemfor oil and gas station
1.1 自主移动平台
为使得机器人能够在复杂的场站环境下移动,其应具有强力的动力基础硬件,能够保障机器人能够在场站非平整路面行走,能够越过普通的障碍物,机器人的可通过性尽可能的提高。同时,作为机械主体部分,其应当有一定的负载能力,能够装载在巡检过程中的传感检测过程中所必须的传感器件。
1.2 底层控制及传感器
为使得巡检机器人能够正常的在场站内能够进行运动,需要根据机器人的运动情况,运动负载,运动时间进行合理的选择电气元件并进行底层控制。根据控制需求选择控制方案;根据巡检的内容和工作要求,选择合适的传感器。
1.3 自主导航的算法开发
为使得巡检机器人能够完成在场站内进行自动的巡检功能,需要开发机器人的自主巡检算法。开发整个场站的建图方案,完成整个场站地图环境的构建;开发导航算法,使得机器人能够在构建的场站环境的地图下,自主的根据设定的目标点进行巡检,同时动态的避开障碍。
1.4 传感器检测算法
为使得巡检机器人能够完成巡检要求,检测场站中的不安全因素,需要开发传感器检测算法,进行非正常值的检测,分析,预警。开发基于红外的图像识别算法,分析异常温度;开发基于可见光的图像识别算法,检测异常阀门,仪表;开发基于声波的频谱分析检测算法,检测异常震动;开发基于甲烷传感器的检测算法,检测甲烷的泄露情况。
1.5 数据处理与预警平台
为使得巡检机器人的检测结果得到有效利用,需要开发数据处理与预警平台。需要搭建可视化窗口平台,完成采集的各项数据的可视化查询功能,完成采集到的数据的各种预警功能,完成良好的人机交互过程,能够进行数据回传和展示。
1.6 整体功能测试
为了检测巡检机器人的整体功能是否达到设计的目标,需要进行整体的功能测试。需要对巡检机器人的各种性能进行测试,以达到设计的目标;需要对巡检机器人的环境建图和自主导航进行测试,来验证自主巡检功能;需要对传感器识别算法进行测试,来验证传感器的异常检测上报功能,需要对巡检机器人的可视化平台进行测试,来验证数据传输的正确性和预警功能的可行性。
2 油气场站自动巡检机器人硬件设计
针对油气场站自动巡检的复杂任务,进行符合其巡检环境的移动机器人底盘开发并根据具体的巡检任务合理的选择对应的传感器。
2.1 巡检机器人底盘
根据以上的设计目标,设计一款具有强越障能力的移动底盘,主要包含以下模块:由四组车轮模组构成的整体移动底盘模块,其为八轮四驱的结构;进行驱动的四组电机和驱动器模块;提供动力的电池及无线充电模块;进行通信的无线WIFI模块;具有防爆功能的壳体模块;完成环境信息提取的传感器模块和完成附加功能的照明灯、警示灯、急停按钮等辅助模块。总体结构示意如图2所示。
在巡检机器人底盘设计中,机器人的车轮组模块是整个越障的核心,其采用的行星轮差动结构使得机器人具有被动适应地形波动的能力。该成轮组的结构如图3所示,动力由中间的太阳轮进行输入,然后通过两侧的惰轮分配给两个驱动轮。该结构具有两个自由度,驱动轮除了可以进行自转外,还能够绕着太阳轮进行转动。而此模块的动力源只有一个,因此是欠驱动系统,另外一个自由度受到重力的影响进行约束。
以图4所示的过程分析结构的自适应能力。在平整路面进行运动时,车轮组受到地面的约束,机器人只能向前或向后运动。当机器人碰到障碍时,由于受到障碍物的支持,前轮将进行抬升,整个车轮组的欠驱动结构将围绕着太阳轮进行顺时针旋转,从而带动前轮跨越障碍,此时整个机器人前轮模组的中心仅提高了半个障碍物的高度。当前轮通过后,后轮由于受到重力但无支撑力时,将进行逆时针旋转,从而也跨越障碍,完成前轮模组整体的越障行为,中心提高了整个障碍物的高度,使得机器人的越障更加平滑。

图2 巡检机器人总体结构示意Fig.2 General structure of inspection robot

图3 车轮模组结构Fig.3 Wheel module construction
根据机器人设计的越障和爬坡性能进行分析机器人的电机所需要的扭矩。由于机器人在爬坡时所需要的扭矩最大,针对此进行分析。如图5所示,忽略空气阻力,机器人此时的受力平衡方程为
Ft=Ff+Fi+Fj
(1)
式(1)中:Ft为移动机器人驱动力;Ff为滚动摩擦阻力;Fi为爬坡阻力;Fj为加速度阻力。
移动机器人的驱动力Ft的计算公式为
(2)
式(2)中:Tt为作用在驱动轮上的转矩;Te为电机转矩;ig为减速器传动比;ηT为传动系机械效率;r为驱动轮半径。

图4 车体越障过程Fig.4 The process of vehicle crossing obstacles

图5 爬坡时机器人受力分析Fig.5 Force analysis of robot when climbing slope
滚动摩擦阻力Ff的计算公式为
Ff=fG
(3)
式(3)中:f为滚动摩擦系数;G为重力加速度。
爬坡阻力Fi的计算公式为
Fi=Gsinα
(4)
式(4)中:α为斜坡倾角。
假设在行进过程中的速度较为平稳,没有太多的速度变化,忽略加速度阻力。将式(2)~式(4) 代入式 (1)中可得
(5)
由于机器人设定的爬坡角度为30°,传动比设为60,传动系数设置为0.98,f设置为0.02,可以得到每个电机需要的扭矩为7.2 N·m。
最终经过设计和分析,得到表1所示的巡检机器人主要设计参数指标。

表1 巡检机器人主要设计参数指标Table 1 Main design parameters of inspection robot
2.2 传感器系统组成
为保证巡检机器人能够自适应的在环境中进行自主巡检,需要配备不同功能的传感器来完成相应的任务,主要的传感器分为两个大类:一类用于保障机器人的自主移动能力,另一类用于完成现场环境的异常检测。
为保障机器人具有自主的移动能力,需要的传感器包括:①多线激光雷达,通过多对激光发射和接收装置进行激光测距,形成点云,完成环境信息的采集建图。本文系统采用禾赛的16线中距机械式激光雷达;②GNSS模块,用来提供精确的位置信息,从而能够辅助自动导航完成定位的功能,本文系统选择上海华测的组合导航接收机;③惯性测量单元(inertial measurement unit,IMU),为了获得移动平台的速度和加速度信息,用于解决依靠激光雷达建图时的畸变问题及用于后期算法的速度环的反馈,选用IMU来作为相关信息的传感设备,本文系统选择搭载的是Xsens的惯性测量单元。
为了保障机器人能够进行环境异常的检测,需要的传感器包括:①防爆摄像仪,用于在油气场站进行环境监测,异常捕捉,仪表数据读取,本文系统选择搭载ZAFR6202-AT防爆摄像仪,该防爆摄像仪集防爆摄像仪(护罩)、防爆热像仪、防爆云台、防爆解码器、防爆雨刷于一体;②防爆式甲烷传感器,用于检测场站中的甲烷浓度,进行泄露检测,本文系统选择搭载的是威海精讯畅通的防爆式甲烷传感器;③防爆拾音器,用于进行音频分析,检测设备异常声响,有较好的信噪比,能够不失真的采集四周的声音信息,并且需适用于爆炸性气体混合物危险场所,本文系统选择的是用深圳世国的防爆拾音器。
3 油气场站自动巡检机器人系统算法及软件开发
开发一套全自动油气场站巡检机器人系统的算法和可视化平台,通过搭载的激光雷达,IMU等传感器完成自主导航算法开发,通过高清摄像机、红外成像仪、声音传感器、气体传感器,实现油气场站现场仪表数据以及阀门启闭状态、异常温度、设备振动状态、气体泄漏等多种检测任务的自动巡检,并对传输至远程数据中心的实时数据进行处理,及时发现安全隐患并主动预警,减少人工检测的危险性,提升油气场站无人化安全管理水平。
3.1 底层控制系统设计
对于本巡检机器人系统,设计了专门的底层控制系统来完成底层硬件的控制,从而能够在独立于上层应用下控制底层的运动,设计的系统框架如图6所示。
工控机负责上层算法的计算与运动命令的产生,然后通过指定的协议格式,以232的传输方式下发给底层的控制系统进行执行。考虑到整个系统的计算能力和处理能力,采用了STM32进行作为控制芯片进行控制。在底层的控制这一层级,系统主要完成上层工控机计算好的运动指令的计息与校核,然后分析出四个轮子的轮速信息,通过CAN通讯的方式,下发给驱动器,然后驱动器通过PID算法进行闭环的速度执行,通过反馈信息反馈上来,最终通过底层控制芯片将四轮的轮速信息反馈上工控机进行处理。

图6 底层控制逻辑Fig.6 Underlying control logic
为保障机器人的越障性能,本移动底盘采用四驱差速转向的结构进行设计。此时可以通过控制机器人的每个电机的转速进而控制移动平台的运动。在已知每侧轮的转速vR、vL和轮距d时,机器人的角速度w和线速度v可表示为
(6)
(7)
式中:下标R表示右侧轮;下标L表示左侧轮。
则可以根据式(6)、式(7),进行计算下发给各个驱动器的具体速度指令。
3.2 自主导航算法开发
为保证巡检机器人能够正常的在场区内进自主巡检,数据采集等功能,其应当具有在场区内根据设置的目标点进行自主的路径规划,自动避开障碍物的功能。为保障机器人有如上的功能,需要对巡检机器人进行自主导航算法的开发,框架如图7所示,其主要构成如下。
(1)同时定位与建图。通过SLAM算法进行构建点云地图,以用于后续的导航地图的生成。
(2)地图数据的转化。对于生成的地图信息,需要进行地图的转化,才能用于导航过程中的路径规划。
(3)轨迹规划。根据栅格地图,进行路径的规划,最终给到控制器真实的执行速度信息(包括角速度和线速度)。
(4)动态避障。动态的根据传感器收集的信息,进行障碍物的采集,并将其更新到局部地图中,从而能够动态的调整巡检机器人的实时位置信息,避免撞上障碍物。

图7 导航流程框架Fig.7 Navigation flow framework
基于以上设计的框架,最终构建了如下的实现方式。
采用Ubuntu下的ROS系统作为整个巡检机器人上层算法的开发环境,完成系统的信息管理与分发,数据的处理与各种话题的订阅,服务的激活等操作。
在导航算法方面,采用现有的建图算法,以Lego-LOAM[8]算法为基础,作为建图的主要算法。以先录包后建图的方式来降低对工控机的要求,通过订阅禾赛雷达的/hesai/pandar话题和/imu/data话题,最终输出环境的三维点云地图。
在得到三维点云地图后,采用OctoMap[9]包进行转换地图数据。在构建八叉树三维环境地图的时,采用概率的方式来进行描述每个小正方体是否被占据从而来解决由于观测噪声引起的误判现象。采用的概率更新的方程为
P(n|z1∶T)=
(8)
式(8)中:n为小正方体的编号;P(n|z1∶T-1)为由t=1~T-1时刻观测到的数据得到的第n个方格被占据的概率;z1,z2,…,zT为t=1,2,…,T时刻观测到的数据值。
在构建好八叉树地图后,根据该位置处的占据概率和判断阈值来生成栅格地图。
最后依赖机器人操作系统(robot operating system,ROS)的navigation包集合,采用A*算法[10]作为全局路径的规划器,采用动态窗口法(dynamic window approach, DWA)[11]作为局部路径的规划器,最终生成可以执行的运动指令,下发给底层控制系统进行执行。
本文系统对于DWA局部规划器加入速度反馈项进行调节机器人速度的稳定性,将其评价函数修改为
G(v,ω)=δ[αheading(v,ω)+βdist(v,ω)+
γvel(v,ω)+σsmooth(v,ω)]
(9)
式(9)中:G为关于线速度v和角速度w的函数,其取决于heading函数,惩罚当前值的车头角度、dist函数、惩罚距离值、vel函数、惩罚速度值,δ、α、β、γ、σ分别为对应的惩罚系数;smooth函数是加入的反馈项,其计算规则为
smoth(v,ω)=1-(v-vo)
(10)
式(10)中:vo为当前状态下的移动机器人速度。
当加入了此评价函数值时,选择其他的速度带来的增益较小时,机器人将会维持原有的速度,使得机器人的运动更加的连续。
3.3 自主巡检算法开发
在完成巡检机器人的自主移动算法开发后,需要进行巡检任务的上层算法开发。这部分的算法开发针对各种异常环境的检测,主要涉及对油气场站中温度异常检测,开关阀门状态异常检测,环境声音异常检测,环境甲烷浓度异常检测等。
针对环境的温度检测问题,采用的基于红外的图像传感器进行红外的热辐射进行检测,将检测的结果进行计算。当传感器检测到温度异常,大于设定的某个上限的时候,将进行报警。
针对环境中的数字仪表的问题,采用可见光摄像头进行处理,对于采集到的环境进行图像分割处理[12],对于数字仪表器,识别其数值和记录的数据进行对比,从而能够发现仪表上显示的指数的异常问题;对于一些阀门的状态,也可以判断阀门的状态是否处于正常状态。
针对异常声音的处理,机器人先完成指定地点的音频采集,作为原始对比音频,通过快速傅里叶变换(fast Fourier transform,FFT)实现对音频信号从时域信号转换为频域信号[13]。通过特征提取,完成原始音频的允许频率以及幅值的提取。而后,在实际巡检过程中,通过再次采集监测点音频,同样通过FFT以相同方式实现特征提取,比对原始允许的频率以及幅值,计算是否存在异常的信号。
对于甲烷泄露的检测,设计了一种甲烷检测系统,采用多个传感器获取环境中与催化燃烧反应有关的湿度、温度、甲烷、氧气和二氧化碳等参数,再将获取的传感器数据通过局部异常因子算法进行预处理。在此基础上,通过随机森林算法提取重要特征,再去除共线性特征,然后通过极端随机树算法[14]对多个传感器采集的数据进行训练得出预测模型,以便实现较高浓度的甲烷预测。
在完成以上的环境检测的传感器开发后,巡检机器人即拥有了自主巡检的能力,能够完成对陌生的环境进行温度是否正常,阀门状态是否正常,环境震动是否正常,甲烷是否泄露等问题进行检测并自主上报。
3.4 远程可视化平台开发
为了能够将巡检机器人在巡检过程中的状态,发现的问题及时的返回给中控室,需要进行开发远程可视化平台。通过此平台,更便于后台工作人员查看巡检机器人的位置、状态、采集的数据、异常信息和历史记录等信息。
系统主要分为服务器端、网页端和机器人端。机器人端主要包括手柄模块、底盘模块、音频模块、导航模块、RS485模块、自主任务模块和消息队列遥测传输(message queuing telemetry transport,MQTT)MQTT服务器端,它们之间互相通信是通过MQTT服务器进行消息转发,MQTT服务器端与服务器通信模块直接通信,服务器通信模块和服务器端的MQTT服务器通信,将机器人端MQTT服务器收到的消息上传到服务器端的MQTT服务器,服务器端的MQTT服务器将数据上报到网页端,将一些数据保存在数据库中,也可以接受来自网页端的指令和从数据库中获取数据,将数据转发给机器人端,机器人端的MQTT服务器再将指令和数据发给各个对应的模块。
网页端平台主界面(图8)主要包括点云地图、任务模块、视频模块、机器人状态模块、遥操作模块。
后台管理界面(图9)分为机器人信息、后台日志管理、后台传感器数据和后台任务管理四部分,主要管理网页展示的信息,可以在后台查看到完整的数据并进行修改。
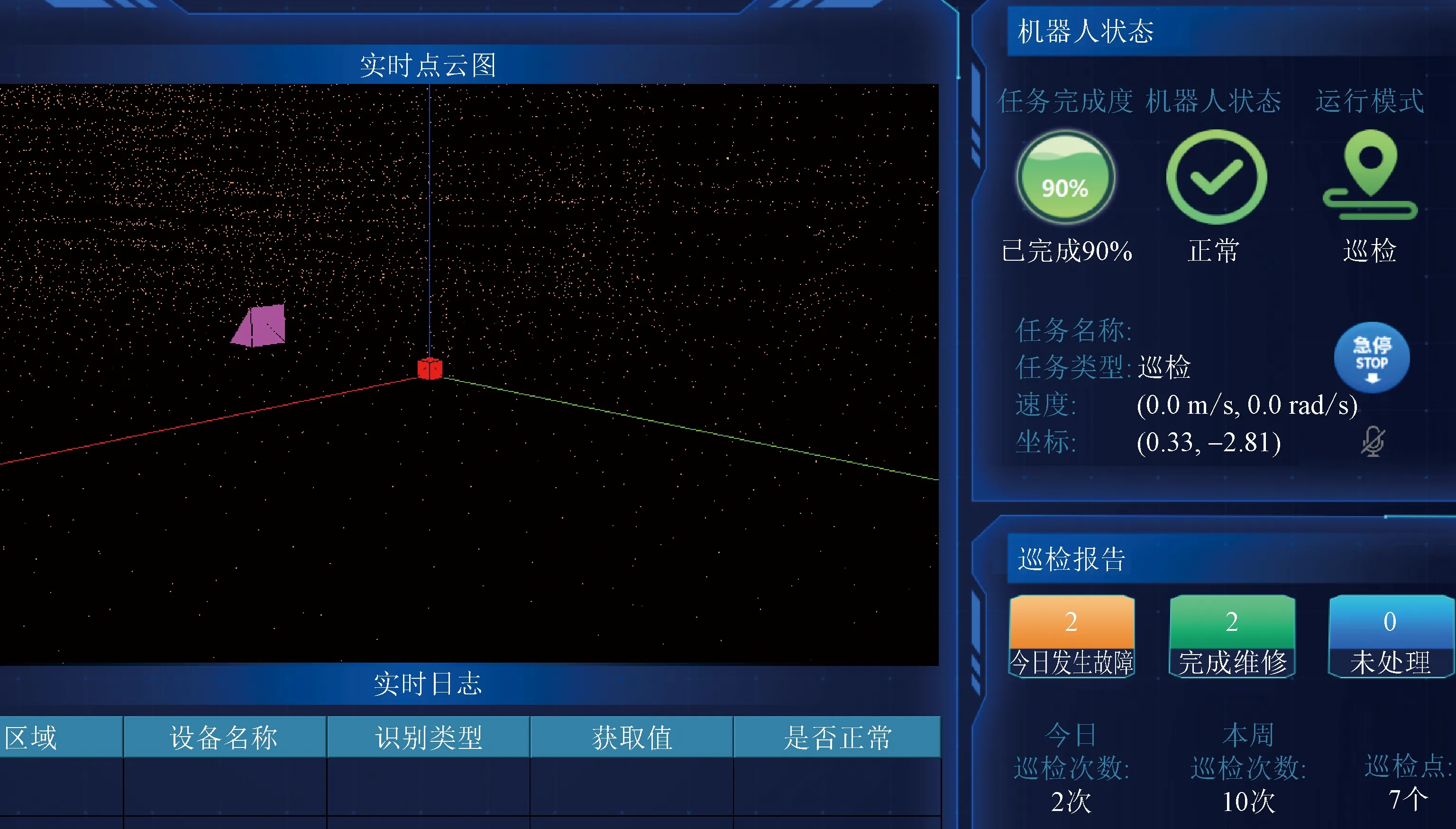
图8 网页端主界面Fig.8 Main page of website

图9 机器人状态信息可视化界面Fig.9 Visual interface of robot state information
4 油气场站自动巡检机器人系统集成测试
在完成整个油气产站自动巡检机器人系统的设计后,进行了样机的制造并对设计过程中的各项指标和功能进行了系统的测试。
4.1 巡检机器人本体测试
根据2.1节中的设计方案,最终得到图10所示的实物样机,对其进行能力测试。
如图11所示,选取10°~40°的坡道于机器人所经道路上,机器人分别以0.5、1、1.5 m/s行驶,,不同速度爬行每个坡道5次。经测试显示机器人可稳定在最高为30°的坡道上行驶。

图10 油气场站自动巡检机器人样机Fig.10 Prototype of automatic inspection robot for oil and gas station
如图12所示,设置10~30 cm不同高度的障碍在机器人所经道路上,机器人分别以0.5、1、1.5 m/s行驶,不同速度每个障碍物经过5次。经测试显示机器人最高可稳定越过25 cm高的障碍物。

图11 爬坡性能测试Fig.11 Climbing performance test

图12 越障性能测试Fig.12 Obstacle crossing performance test
设置100~500 mm不同宽度的壕沟在机器人所经道路上,机器人分别以0.5、1、1.5 m/s行驶,不同速度每道壕沟经过5次。测试显示机器人最高可稳定越过400 mm的壕沟。
在电池充满电的情况下,进行自主导航续航测试,按录制场景及自主导航路径,随后不断循环行驶,直至无电停止行驶。最终记录从导航开始至电池电量无法支持机器人行驶的时间。电池电压满电约57 V,机器停止运行时约为46.8 V。最终累计自动导航平地运行约7 h 10 min,加上前期准备工作所耗费电力。可得结论:机器人平地满电可运行时间为7.5 h。
4.2 巡检机器人导航测试
在2.4节中,详细叙述了环境建图所需要的传感器数据,建图的逻辑和工作框架,建图的算法实现流程。利用前述的方法,进行环境建图的测试,以某园区的环境作为环境建图的测试对象,对一个长约1 km、宽约300 m的园区进行环境建图。在建图部分,需要完成步骤如下。
步骤1采集环境数据包。将巡检机器人开到要进行录制环境数据包的场地,指定录包的指令,开始录制数据包
步骤2运行建图算法生成点云地图。在完成了环境数据包的录制后,可以运行建图的算法,进行建图。启动环境建图的数据包,并打开RVIZ进行可视化数据显示,最终生成如图13(a)所示的点云点图。
步骤3运行地图转换算法进行转换为栅格地图。运行转化栅格地图的功能包,将其转化为栅格地图以供导航使用,结果如图13(b)所示。
对于生成的点云地图,主要通过两种方式进行精度的评估:一种是与已有的地图进行对比,另一种则是通过回环的检测。如图14所示,根据高德地图的卫星地图,截取了一张录制环境的地形地图。然后将自己生成的点云地图转化的栅格地图进行对比,发现基本符合,在几百米的地图环境下,误差都控制在一米级以下,整体的环境的路面趋势符合。
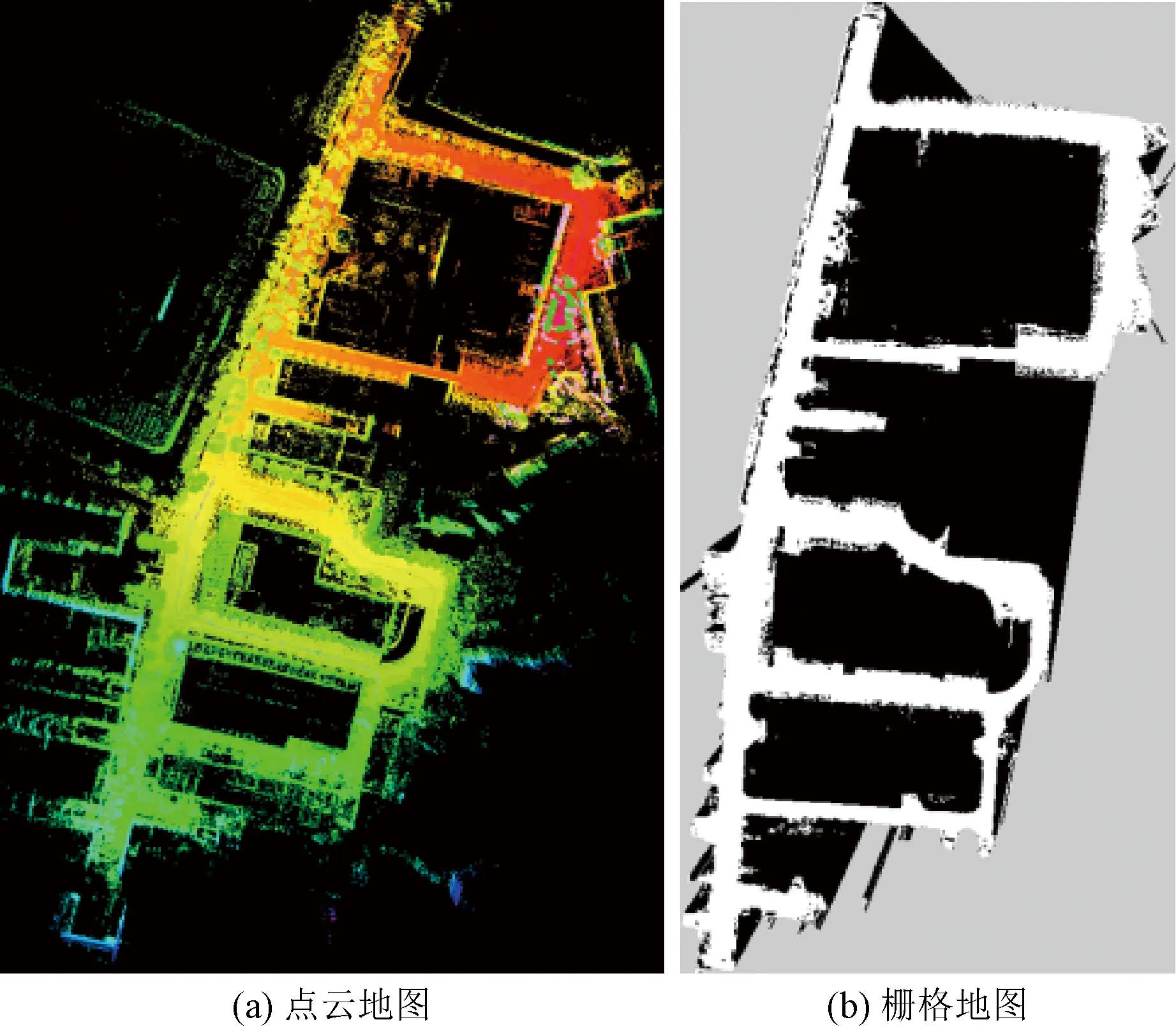
图13 环境地图Fig.13 Environmental map
以机器人的起点位置作为原点,X轴朝前,Y轴朝左进行参考,然后提取了4个特征点的真实世界坐标和点云地图中的坐标进行对比误差,得到表2所示的误差关系,表明建立的点云地图总平均误差小于0.69%。
在完成了环境地图的构建之后,需要进行导航的测试环节。机器人能够在下发了目标信息之后,生成一条规划好的全局路径和具体执行的局部路径。在执行过程中,需要不断的进行自定位,以确保自己的位置是正确的。同时,利用搭载的传感器,进行环境信息的识别,判断障碍物是否出现在规划的路径中,做到动态的路径修改以避障。
如图15所示,经测试,巡检机器人能够完成路径规划并动态的避开障碍物。

图14 生成的地图与卫星地图的对比Fig.14 Comparison of the map with the satellite map

表2 特征点在真实世界的坐标与点云中的坐标对比Table 2 The coordinates of feature points in the real world and the map
4.3 巡检机器人预警能力测试
对于巡检机器人的数据处理与预警能力进行测试,通过可视化界面在任务模块下发热成像识别任务,利用红外热成像技术检测设备温度的分布情况进而确认设备的运行情况,如图16、图17所示,利用摄像头对指针的识别结果如图18所示,该系统能够进行环境温度检测、指针识别并将其传到web端可视化界面展示。
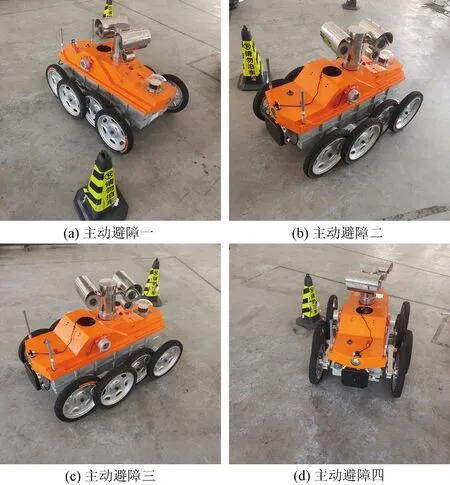
图15 避障测试Fig.15 Obstacle avoidance test

图16 热成像结果Fig.16 Thermal imaging results
经测试,热成像识别功能共执行6条用例,发现缺陷0个;通过可视化界面在任务模块下发甲烷检测任务,通过气体传感器将气体成分、浓度等信息传到web端可视化界面展示,甲烷检测分析功能测试执行了3条用例,发现缺陷0个;通过可视化界面在任务模块下发音频检测分析任务,利用数字拾音器通过系统将音频信号转换成数字信号并处理,展示为音频波动图,传到web端可视化界面。音频检测分析功能测试执行了4条用例,发现缺陷0个。测试中当二氧化碳超过10-3和甲烷体积分数超过4%时,会自动弹出报警框进行提示。

图17 温度数据历史变化趋势Fig.17 Historical trend of temperature data
5 结论
系统论述了油气场站全自动化巡检机器人系统的整体内容,包括自主移动平台的整体构建、传感器选型和底层控制、自主导航的算法开发、传感器检测算法、数据处理与预警平台。经实验证明,本油气场站自动化巡检机器人系统具有灵活跨越各种障碍物、自主建立环境地图并导航、自主收集检测环境样本并回传数据、进行数据分析并报警等能力。得出如下结论。
(1)构建了一种新型的越障底盘,通过采用欠驱动的行星齿轮组的结构,使其具备了较强的地形自适应能力,在本机器人的尺寸设计下,能够稳定跨越20 cm的障碍物,在各种非结构化道路上行进。
(2)自主开发了同时建图与定位算法并完成自主导航的算法,通过应用ROS系统和Lego-LOAM的方式进行建图、全局和局部结合的方式进行导航,使得建图误差小于0.69%,导航误差小于10 cm。

图18 指针表识别结果Fig.18 Pointer table recognition result
(3)自主开发传感器检测算法并进行数据处理与预警,识别成功率不低于92%,甲烷浓度高于4%时能够远程报警进行提示。
所设计的油气场站全自动化巡检机器人满足设计目标,在油气自动巡检的应用上有较大前景。但是由于时间仓促和技术的可优化性,本油气场站全自动化巡检机器人仍有进一步优化的空间,在导航算法的柔顺性,大场景建图的可行性评估方面仍然有较大的提升优化空间。
猜你喜欢
城市公共交通(2022年6期)2022-08-22
交通信息与安全(2022年1期)2022-03-20
汽车工程师(2021年12期)2022-01-17
非常规油气(2021年2期)2021-05-24
中国海上油气(2020年6期)2020-03-15
商品与质量(2019年51期)2019-11-28
山西建筑(2019年14期)2019-08-17
电子制作(2019年10期)2019-06-17
军事运筹与系统工程(2018年2期)2018-02-16
能源(2017年5期)2017-07-06
