
基于WSN 的多金属矿井下人机定位系统设计
2022-02-12 05:51:30杜富瑞陈国良谷宝平祝代伟张元生
金属矿山 2022年12期
杜富瑞 陈国良 谷宝平 祝代伟 战 凯 张元生
(1.矿冶科技集团有限公司,北京 100160;2.金属矿山智能开采技术北京市重点实验室,北京 100160;3.西藏华泰龙矿业开发有限公司,西藏 拉萨 850000)
矿业为工业和农业提供了源源不断的原材料和辅助材料,是现代化经济体系中不可替代的基础产业[1],是我国国民经济稳定发展与国家安全的重要支柱。随着各种矿产资源因经济发展而不断消耗,深井开采及高海拔开采是未来资源开采的发展方向。在深井开采及高海拔矿山开采过程中,面临高地应力、高温、缺氧等复杂危险环境,实时获取井下人员及车辆的高精度位置信息,是实现井下人员日常考勤、危险区域预警、灾后救援规划、人机运动轨迹跟踪的必要条件。矿山井下人员及车辆高精度定位系统是矿山安全生产的重要基础[2]。传统的受限空间人机定位系统中,主要是利用射频识别(RFID)或紫峰(ZIGBEE)技术[3-4]。在射频识别定位系统中,主要是通过在井口、岔路口、采场等场所安装射频识别卡,实现对井下人员统计及运动轨迹的跟踪;紫峰定位系统是利用布设在巷道两侧、人员随身佩戴及安装在移动装备上的通信节点组网实现人员和装备的定位及轨迹跟踪。紫峰定位系统适用于短距离和低速率下的定位,具有传输带宽低、抗干扰性差、信号衰减快、系统响应不高的不足。本研究结合中国黄金华泰龙多金属矿的特殊工程背景,利用超宽带通信技术(UWB)、大数据(BIG DATA)、高精度地图(GIS)技术,搭建了井下人机定位无线传感器网络,实现了井下人员及车辆高精度位置信息的实时感知。基于实时位置信息,实现了华泰龙井下人员考勤、运动轨迹跟踪、安全区域管控。同时,将人机实时位置信息数据流与矿山生产大数据流有机融合,为行为管控、车辆无人驾驶和科学调度等矿山智能化建设提供实时高效的数据支撑。
1 基于超宽带通信技术的无线传感器网络
超宽带通信技术(UWB)是由美国联邦通信委员会(FCC)规范的可免授权使用的无线通信技术[5],可以为停车场、地下金属矿巷道、图书馆、大型物流存储仓库等密闭受限空间提供高精度定位服务。超宽带通信技术工作频带范围为3.1 ~10.6 GHz,与现有无线电带宽资源互不冲突,且信号带宽可达1 GHz。由于UWB 是通过不基于载波的ns 至μs 级的非正弦波窄脉冲实现数据传输,具备功耗低、辐射小、传输速率高、抗干扰能力强、功率谱密度低等诸多优良技术特性。
无线传感器网络(WSN)是现代物联网的核心组成部分,融合了智能感知、微电子及网络通讯等多项先进技术[6]。WSN 由大量静止或移动的传感器节点构成,它们以无线通信的方式自组成一个多跳的无线网络,在此网络覆盖的区域内实现信息的感知、采集、处理及传输等工作[7]。WSN 主要由传感器节点、汇聚节点及管理节点组成,传感器节点负责感知空间环境信息(位置、温湿度、振动、音视频等),并将感知信息实时传送给汇聚节点;汇聚节点接收由传感器节点发来的信息后,将信息进行筛选、分类、归集并转发至管理节点;管理节点接收汇聚节点数据信息,与后台高精度地图进行融合并展示。
将UWB 模组嵌入到无线传感器网络节点中,构成UWB 无线传感器网络节点。UWB 无线传感器网络节点其主要由感知单元、处理单元、UWB 通信单元及能量单元构成。UWB 传感器节点结构如图1所示。
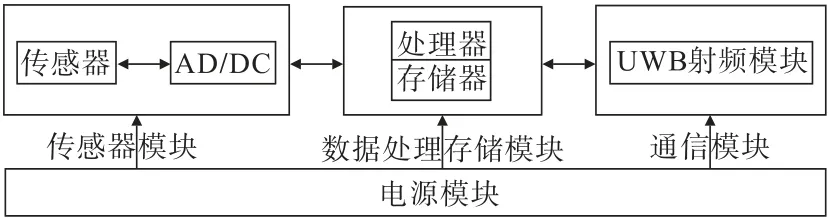
图1 UWB 传感器节点Fig.1 UWB sensor node
UWB 通信单元的作用是负责无线传感器网络节点数据的外发与接收,可根据具体工作任务进行功能单元的裁剪与移植。UWB 无线传感器网络工作时,按照“传感器节点—汇聚节点—管理节点”的顺序进行双工数据传输。融合UWB 的无载波通信及WSN的动态路由技术与传统的无线传感器网络相比,具有功耗低、传输速率高、网络动态自组织、容错性强等优点。典型的UWB 无线传感器网络结构如图2所示。

图2 UWB 无线传感器网络Fig.2 UWB wireless sensor networks
2 人机定位系统组成及定位方法
2.1 系统架构
综合运用UWB 超宽带通信、高速工业以太网络、井下高精度地图及计算机三维展示技术,构建华泰龙多金属矿井下人员及车辆定位系统。人机定位系统主要由地面控制中心、高速工业以太环网、UWB井下无线传感器定位网络组成,井下人机定位系统架构如图3所示。作为无线传感器人机定位网络的管理节点,地面控制中心由数据服务器、客户端、GIS 融合展示平台组成,通过收取井下无线传感器定位网络发来的定位信息,将信息进行归集、分析处理并与GIS 平台融合展示;高速工业以太环网是数据传输链路,将人机时空定位信息传送至地面控制中心;UWB井下无线传感器定位网络主要包括作为汇聚节点使用的固定于巷道两侧的定位基站以及作为传感器节点的人员随身携带及固定于车辆上的人机定位节点。

图3 井下人机定位系统架构Fig.3 Underground personnel and vehicle positioning system architecture
数据通信网络采用工业以太网及有线与无线耦合技术,整个网络分为三级拓扑。地表千兆光纤以太环网为第一级有线拓扑网络,联接地表定位展示平台、核心交换机及数据服务器;井下千兆光纤以太环网为第二级有线拓扑网络,联接井下定位基站及各自动化控制子系统,具体布置方式为威乐4532 中段—威乐4479 中段—威乐4508 中段—铜山4560 中段—铜山4585 中段—铜山4610 中段—4610 中段斜坡道—威乐4532 中段;人员及运动车辆构成第三级无线拓扑网络,通过配置UWB 无线传感器网络节点实现与第二级网络中的定位基站数据互传。该网络拓扑架构采用有线+无线的方式,具有延展性强、鲁棒性好、可靠性高的特点,可有效适应井下恶劣的工作环境。
通过建立基于GIS 技术的井下高精度地图,将井下人员及运动车辆活动区域坐标化。分布于井下监测区域内的人员及运动车辆传感器节点,利用UWB无线收发装置实时将包含位置坐标、身份ID 的数据信息通过网络内的其他节点以多跳转发的方式发送到汇聚节点,汇聚节点将接收到的传感器节点数据信息通过有线光纤网络传输至地面控制中心的管理节点。地面控制中心管理节点对接收数据进行清洗校正、聚类统计、高精度地图GIS 平台融合,从而展示井下人员及车辆的时空分布,监控人员及车辆的运动轨迹,实现井下人员及车辆的高精度实时定位。
2.2 定位模型及方法
无线传感器网络定位是利用WSN 中已知节点的位置信息,通过定位模型解算出网络中未知节点的位置信息[8]。在井下无线传感器网络中,固定于巷道两侧的定位基站位置信息已知,称为锚节点;人员及车辆传感器节点位置信息未知,称为传感器节点。要确定节点的位置信息,首先应获取锚节点与传感器节点之间的距离信息。现有无线传感器网络节点测距方法主要有信号强度测距法(RSSI)、到达时间差(TDOA)、到达角度(AOA)、到达时间(TOA)等方法[9-10]。
在各类测距方法中,RSSI 测距方法依赖信道参数模型和定位基站至传感器节点的距离,且不能充分利用UWB 的大带宽特性;AOA 需配置专门的天线阵列,不适合狭窄井下人机定位环境;TDOA 测距方法需要保证所有基站之间严格的时钟同步,这需要增加额外的硬件设备和算法开销。基于UWB 无线通信具有高带宽、时间分辨率高的特性,选择TOA 测距方法。
图4所示为TOA 测距方法的测距流程,信号由传感器节点发起,在t0时刻向基站节点发送通信请求信息帧Frame1,基站节点t1时刻接收到信息帧;基站节点经过Tdelay1时长延时后在t2时刻向传感器节点发送回传信息帧Frame2,传感器节点在t3时刻接收到信息帧。传感器节点经Tdelay2时长延时后在t4时刻向基站节点发送Frame3 信息帧,基站节点在t5时刻接收到信息帧。有如下计算公式:
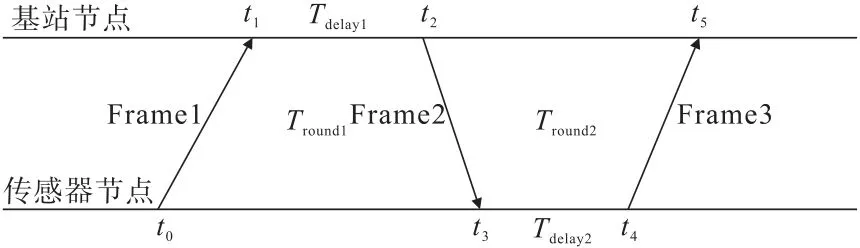
图4 TOA 测距流程Fig.4 TOA ranging process
式中,TF为电磁波在传感器节点与基站节点之间的飞行耗时测量值。
井下受限空间受巷道结构、生产设备、环境粉尘等影响,有着不同于地面空旷环境的复杂性和特殊性。在实际无线传感器网络测距过程中,存在非视距时延、多址干扰、多径效应等现象,影响测距精度。为了降低噪声、提高测距精度,利用卡尔曼滤波(Kalman filtering)对测距数据进行处理。卡尔曼滤波利用某一时刻测量值和上一时刻估计值来预测当前值,具有良好的动态跟踪定位的效果,递归计算复杂度低[11-12]。
对于井下无线传感器网络定位,传感器节点的坐标(x,y)和速度是状态变量,设定状态向量Xk=[xk,vxk,yk,vyk,Ttrk,vΔk]T。其中,(xk,yk)是传感器节点的坐标,(vxk,vyk)是传感器节点的速度。卡尔曼滤波的状态方程和观测方程分别为

式中,Xk为k时刻系统状态的估计值;F、G分别表示状态转换矩阵和噪声耦合矩阵;H为测量转换矩阵,H=[1,0],Mk为均值为0、协方差为Qk服从独立多元正态分布的过程噪声,Qk~cov(Mk);Nk为均值0、协方差Rk服从独立多元正态分布的观测噪声,Rk~cov(Nk)。
其标准卡尔曼滤波过程为

式中,Pk,k-1和Pk为预测协方差矩阵;I为单位矩阵;Kk为卡尔曼增益矩阵;Rk为观测噪声协方差矩阵。
由增益矩阵可知,当Rk噪声增大,卡尔曼增益Kk相应减小。根据观测方程(5),Nk=Zk-HXk,Nk的协方差矩阵Rk=HPk,k-1HT。若基站与传感器节点之间不存在遮挡、电磁波直线传播,Nk服从均值为零的高斯分布;但井下实际环境中遮挡物较多,受多径效应和非视距因素影响较大,Nk服从均值Nk=Zk-dk的高斯分布;dk为基站节点与传感器节点之间距离的实际测量值。
3 功能实现
利用井下高精度地图及计算机三维展示技术,搭建华泰龙多金属矿井下人员及车辆定位系统,主要功能如下。
(1)监测井下人员及车辆的时空分布。在地面控制中心利用3D GIS 平台实时动态显示作业人员及车辆分布情况,统计作业人员及车辆数量,监测各作业面人员及车辆的数量,展示人员及车辆的所在位置及运动方向(图5)。
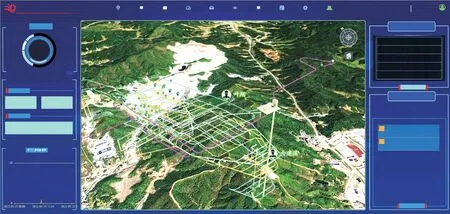
图5 人员及车辆实时位置Fig.5 Real-time location of personnel and vehicle
(2) 查询及预警。人员及车辆位置历史轨迹查询,人员考勤、特种作业人员行进路线查询,人员进入重点区域及人员超时、区域超员及缺员预警。
(3)设备状态在线自诊断。系统设备具有在线自诊断功能,可以实时收集设备状态信息并上传,主要包括基站工作状态(正常、故障)、工作位置、MAC地址及供电状态等信息。
4 结 语
金属矿山井下巷道结构复杂、人员车辆流动性大、障碍物多,基于无线传感器网络模型构建了华泰龙多金属矿井下人员车辆定位系统。系统利用超宽带通信和卡尔曼滤波实现了基站节点和传感器节点之间距离信息的精确感知,基于距离信息及井下高精度地图,实现了人员及车辆位置信息的精确测定。系统可实现人员及车辆位置信息实时感知、历史轨迹查询及设备状态在线监测。结合矿山大数据分析、矿山智能调度系统及井下环境感知监测系统,可以实现危险区域管控、安全预警及应急快速救援。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31 09:04:00
南都周刊(2021年3期)2021-04-22 16:43:49
无线互联科技(2021年4期)2021-04-21 10:12:36
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
探索科学(2017年4期)2017-05-04 04:09:47
电子制作(2016年15期)2017-01-15 13:39:03
海外星云(2016年7期)2016-12-01 04:17:50
太空探索(2016年5期)2016-07-12 15:17:58
中国交通信息化(2016年8期)2016-06-06 03:56:25
