
数控机床车间传动设备控制自动化标定方法
2022-02-11 11:47:20胡华丽陈炳森
制造业自动化 2022年1期
胡华丽,季 锐,陈炳森
(广西水利电力职业技术学院,南宁 530023)
0 引言
工业企业中拥有数据机床车间的数量,成为衡量一个企业工业现代化发展水平的重要指标。随着经济的不断增长,人们对于数控机床车间设备的使用性能要求也不断提升,当前我国成为世界数控机床设备第一消费国。20世纪50年代,我国的数控机床技术才逐渐起步,但数控产业发展较为迅速,经过半个世纪发展,我国的数控产业与技术取得了很大的成就。目前,普通机床逐渐被数控机床取代,在此趋势下,数控机床在工业车间中的占比逐渐增加[1]。数控机床的增速比普通机床高出5个百分点,其控制技术的要求相对普通机床更高。
当数控机床车间传动设备在运行过程中出现控制问题时,需要对整体控制过程进行分析,及时发掘异常的控制参数对其展开标定[2]。本次研究中将主要对数控车间的传动系统控制过程进行标定,对于此过程而言,在以往的研究中也提出了很多针对其的标定方法,但使用效果均不能满足人们的需求。当前标定方法在使用后,依旧无法改变设备参数变换后的传动设备发生停顿的问题[3]。为此,在本次研究中将提出一种新型自动化标定方法,根据完整的控制过程结合多组控制规范,对控制参数进行标定。希望通过本次研究,改善当前传动设备控制标定现状,提升数控机床车间的工作效率,推动工业智能化发展。
1 数控机床车间传动设备控制自动化标定方法设计
1.1 构建传动设备动力学模型
对数控机床车间传动设备进行实地考察,根据考察结果结合相应的控制理念,构建动力学模型,为后续的研究提供基础。数控传动系统大致包含发动机、电机、能源组、传动系统以及控制器几部分[4]。为便于计算,作出以下设定:
1)传动设备的角速度为α1,设备的质心A1在O点,转动惯性为F1;
2)连接滑块1的质量设定为m2,其质心A2在Y处,速度为v2,绕点O的转动惯性为F2;
3)使用α2表示传动连接板1的角速度,此连接板的重量设定为m3,其对质心A3的转动惯量设定为FA3;
4)使用α3表示传动连接板2的角速度,将其质量设定为m4,使用FA4表示连接板对质心A4的转动惯量;
5)连接滑块2的质量设定为m5,其质心F5在Q处,其速度设定为v5。
根据上述假设,可得到传动设备的瞬时的动能增量可表示为:

在此公式的基础上,电机的驱动力矩M1直接作用在传动设备的连接板上,如果其工作状态下的全部作用在此连接板上,其大小设定为G5,则在dt时刻其瞬间做功可表示为:

根据动能定理,传动设备在某瞬间的总动能的增量与此瞬间内此设备各外力功之和一致,由此可得到传动设备的运动方程:

由于式(3)中含有大量的未知运动参量,求解过程较为复杂,为简化计算过程,将其整合为等效力学模型。围绕β1构建独立的广义坐标,将式(3)改写为下述形式:

对此公式进行转型,则有:

由上述公式可以看出,Fall中含有转动惯性的量纲,可将其视作等效转动惯性。Mall中包含各力矩的量纲,可将其作为等效力矩,公式中各个转动速度的比值均可作为广义坐标的函数:

与此同时,根据外力距以及工作阻力之间的关系,可得到传动设备的运动参数:

根据上述公式,得到传动设备的运行方程:

根据此公式计算传动设备运动过程,并将其作为后续研究中的模型基础。
1.2 传动设备控制参数标定
对于整个传动设备而言,其控制过程对于数控机床车间的工作效率具有显著的影响。本次研究中,将主要对控制过程中的运行状态切换控制部分进行研究,对不同运用状态下的控制规律进行分析,完成控制参数的标定过程。对于传动设备而言,运行状态更换过程可以理解为是由一个转速转换到另一个转速,在转速更换的过程中,子设备会发生细微的变化。本次研究中,将转速更换前的传动设备运行状态设定为L1,转速转变后传动设备运行状态设定为L2。在转速变换的控制过程中,其转速转矩具有线性关系,则各元件之间的关系可表示为:

在上述公式中,h1、h2、h3分别表示传动齿轮排1、传动齿轮排2以及传动齿轮排3的特性参数;ir表示传动箱的传动比;bA表示耦合结构A的输入转速;bB表示耦合结构B的输入转速;bN表示全部耦合结构的输出转速;ball表示发动机转速;E0表示耦合结构的输出转矩;Ei表示发动机输出转矩;EA与EB分别表示耦合结构A与耦合结构B输出的转矩。对上述公式进行分析可以看出,传送设备的输出转速与发动机输出转速呈正比例关系,根据具体的控制要求,对发动机或电机进行调节,可实现传动设备的控制。根据此原理,获取传动设备运行数据将其设定为设备控制参数,并对其展开标定,为最终的控制过程自动化标定提供数据来源。
1.3 传动设备控制自动化标定
在获取控制参数后,根据数控机床车间对传动设备的性能要求,对设备的控制参数与运行参数进行优化。针对当前传动设备的相关要求,本次研究中将主要对传动设备基础运行参数以及转速控制过程进行标定。在上文设计内容的基础上,选用CANaper软件[5]完成传动设备整体控制过程的标定工作。在此软件中可完成传动控制单元开发、控制参数标定以及数据采集工作。根据上文中计算得到控制参数,构建A2L文件,并将其录入到标定数据库中。在此文件中,每个控制参数与传动设备的实际测量值使用统一的变量名称表示。在标定过程中如需要读取某一数据时,在A2L文件中搜寻到相关变量,并在软件中确定数据长度以及存储位置等信息,而后使用此数据完成标定工作。具体标定过程划分为下述两部分:
1)传动设备基础运行参数标定
首先设定传动设备的基础运行参数,根据相关控制规定使用此部分参数进行计算,在保证设备运行安全性的情况下,完成标定过程。本次研究中选定“设备总排量”、“额定转速”、“额定负荷”以及“设备传动效率”作为基础参数,具体参数计算内容设定如下:
设备总排量:设备动力子器件的总排量;
额定转速:电机额定转速;
额定负荷:动力器件、电机以及传动设备的额定负荷量,使用“负荷%”表示;
设备传动效率:传动设备在额定负荷条件下,得到的传动比,在完成设备整体标定前,使用估算结果表示。
根据上述设定内容,对传动设备基础运行参数展开计算,同时完成标定过程,将标定后的数据作为其他控制过程的计算基础。
2)转速控制过程标定
在控制过程的标定过程中,首先对式(11)与式(10)进行整合,得到传动设备在空档状态下,各个子设备的转速关系,具体如下式所示:

其中,nA表示电机A的额定转速;nB表示电机B的额定转速;h4表示传动齿轮排4的特性参数;nj1表示传动齿轮整体架构转速。推导上述公式,得到电机A、B以及发动机的转速关系,具体如下式:

为了便于分析,将其转化为各子设备的角速度关系:

本次研究仅针对传动设备的转动惯性,因此,使用上述公式可完成设备转速控制的标定过程。使用此公式后,可保证标定后各参数之间的平衡性,在提升传动设备使用性能的同时,维持设备运行的稳定程度。
2 标定实验论证分析
2.1 实验准备
在本次研究中提出了一种新型数控机床车间传动设备控制自动化标定方法,现构建标定实验环节对此方法的应用效果加以分析,以此确定此方法具有一定的应用价值。
在对以往的研究结果进行分析后可以发现,常规的传动设备标定流程需要经过实验台基本标定、实际设备标定以及设备整体性实验后,才能投入到实际应用中。传动设备50%左右的标定参数需要在实验台中完成实验过程,确定基本参数后,方可使用其进行标定。针对本次所研究的数控机床车间传动设备,选取实验台基本标定实验方法对新型方法的标定效果进行分析。在实验台标定测试中,将24V直流电源、微型传动设备的线束、上位机以及标定软件连接在一起,组成标定实验台,具体实验台如图1所示。

图1 实验台组成结构
在实验台搭建完成后,通过传动设备的运行原理对其控制软件中各个参数进行分析,确定在实验台上可标定的参数。
2.2 实验台标定操作过程
为降低实验难度,本次实验仅对传动设备静态换挡控制过程进行分析,选择低转速档位调整到高转速档位以及高转速档位调整到低转速档位两部分中的参数展开标定。对以往的实验过程进行分析后,确定参数标定中需要的变量:设备额定转速、设备目标转速、换挡位置以及换挡控制模式。同时,选择基础标定方法与PID标定方法与文中提出的新型标定方法对实验目标进行标定,绘制换挡控制曲线,分析曲线确定换挡过程中是否存在超调。为了更好地获取实验结果,将设备额定转速设定为2000r/min,设备目标转速设定为5000r/min,构建低速档位调整标定实验环境,绘制标定前换挡曲线。在此操作完成后,将目标转速与额定转速对调,构建高速档位调整标定实验环境,并绘制此实验环境中的换挡曲线,为实验结果分析过程提供对照数据,具体如图2所示。
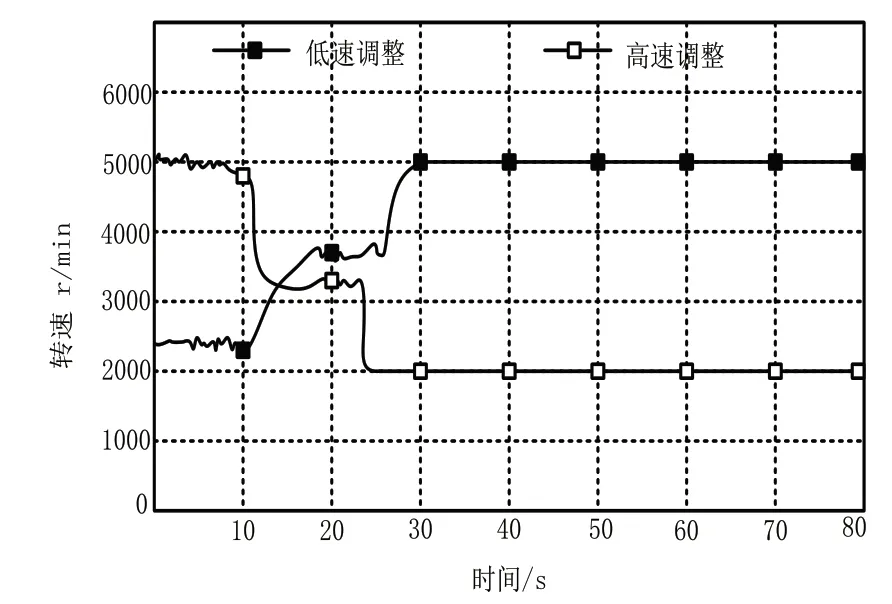
图2 标定前换挡曲线
由图2可知,在标定前的换挡过程中,传动设备会产生短时间停顿,说明此时的控制参数曲线偏小,影响传动设备的运行稳定性。根据图2曲线,结合实验台标定换挡曲线,对新型方法与其他两种方法的标定效果加以分析。
2.3 低速档位调整标定实验结果分析
根据上文中设定的实验准备以及实验操作过程,完成低速档位调整到高速档位控制标定,并绘制换挡曲线如图3所示。
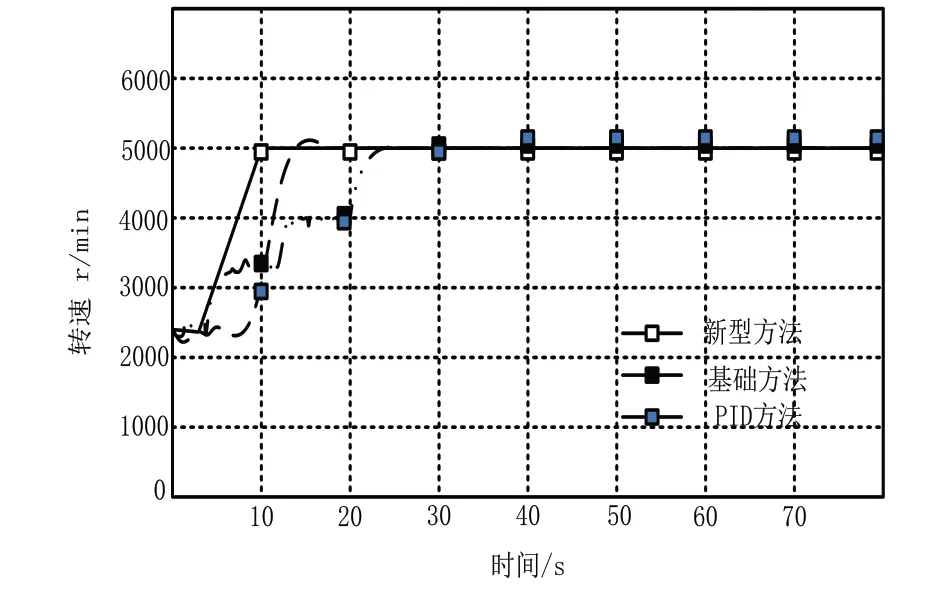
图3 低速档位调整标定后换挡曲线
对上述图像进行分析可以看出,在使用不同的标定方法完成控制参数标定后得到了不同的换挡曲线。与标定前所得曲线相比,新型方法使用后对换挡过程中的停顿问题进行及时的处理,保证传动设备的运行安全。其他两种标定方法使用后,虽然在一定程度上改善了控制过程中的停顿情况,但还是存在短时间的设备运行状态不稳定问题。综合上述分析结果可知,在低速档位调整中,新型标定方法的标定效果更佳。
2.4 高速档位调整标定实验结果分析
沿用低速档位调整标定实验环境,将设备额定转速设定为5000r/min,目标转速调整为2000r/min。对此高速档位调整控制过程进行标定,并绘制标定后设备换挡曲线,具体如图4所示。

图4 高速档位调整标定后换挡曲线
对图4中内容进行分析可知,此实验结果与低速档位调整标定实验结果大致相同,不同的标定方法得到的换挡曲线具有一定的差异。在此实验环境下,新型方法依旧可以对控制参数进行正确的标定,对偏小的控制参数数值进行调整,控制设备转速转换中的停顿情况。与新型方法相比,其他两种方法的标定效果不尽如人意。此两种标定方法使用后,其换挡曲线中还存在大量的停顿情况,且时间较长、停顿次数较多与控制参数标定前的换挡曲线趋于一致。总结上述实验结果可知,在此实验环境下,新型方法的标定效果更好。
3 结语
为了最大程度发挥数控机床车间传动设备的工作潜力,使其在经济性与动力性均得到最佳水平的应用,需要对其控制过程进行标定,在本次研究中提出一种新型标定方法,仿真实验证实使用此方法完成标定后,传动设备的使用性能得到了大幅度提升,实现控制标定的目标。但此方法仅针对当前标定方法的不足进行优化,在部分领域还存在细微的问题。为保证此方法可与数控机床的发展方向一致,在日后的研究中还需对此方法进行不断的完善。
猜你喜欢
飞控与探测(2022年6期)2022-03-20 02:16:14
装备制造技术(2021年1期)2021-05-21 07:55:00
力学学报(2020年4期)2020-08-11 02:32:12
智富时代(2018年9期)2018-10-19 18:51:44
黑龙江电力(2017年1期)2017-05-17 04:25:08
湖北文理学院学报(2017年2期)2017-04-16 05:09:09
工业设计(2016年11期)2016-04-16 02:48:32
河南科技(2015年2期)2015-02-27 14:20:29
电测与仪表(2014年15期)2014-04-04 12:05:32
河南科技(2014年4期)2014-02-27 14:07:12
