
海洋牧场水下巡检机器人耐压舱力学特性分析*
2022-02-10 08:37董苏德周陈炎
南方农机 2022年2期
杨 洋 , 祁 敏 , 董苏德 , 周陈炎
(南通理工学院电气与能源工程学院,江苏 南通 226000)
0 引言
海洋牧场作为适合海洋生物生长和繁衍的人工“渔场”,需要随时留意区域内生物的一举一动[1]。在早期,对于海洋牧场的监控往往依靠潜水员,但潜水员长期在海底工作加上受到相应压强的作用,安全系数并不高,且人力成本也较大[2]。目前,随着科技的发展,海洋牧场水下巡检机器人已经开始慢慢代替潜水员在深水中长时间作业,并广泛应用于军、民领域[3-4]。某海洋牧场水下巡检机器人及水下监测情况,如图1所示。
图1 某海洋牧场巡检机器人及监测画面
耐压舱作为海洋牧场水下巡检机器人主要元件的安装空间及水下压强的承压结构,在设计时就需要对其进行力学分析,以保证其在运作过程中不发生故障及损坏。课题组基于有限元法对已设计完毕的海洋牧场水下巡检机器人耐压舱进行强度计算,保证其强度满足规范要求。同时,考虑到水下机器人在工作时,由于各元件的运行及外力作用而导致耐压舱发生共振问题,对此巡检机器人耐压舱进行模态分析,以避免发生共振效应。
1 海洋牧场水下巡检机器人结构
课题组设计的海洋牧场水下机器人结构采用飞鱼型结构,相较于一般的流线型结构,具有能耗低、运动灵活、综合效率高及阻力小等特点[5-6]。该水下机器人结构主要由航行体、飞翼、螺旋桨及固定装置组成。内部舵机带动机翼运动,耐压舱内部放置摄像监控设备及传输数据设备等,以实现对海洋牧场生物及环境的监测。该机器人总长为756 mm,总宽为918 mm,具体结构模型如图2所示。水下机器人耐压舱材料采用2024铝合金,厚度为12 mm,具体参数如表1所示。

表1 2024铝合金参数
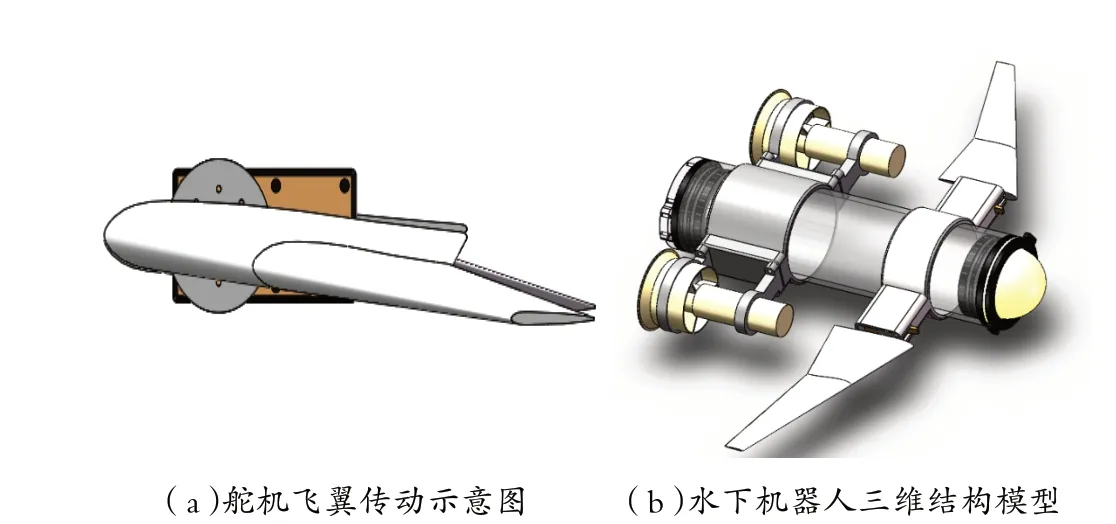
图2 海洋牧场巡检水下机器人整体结构示意图
2 海洋牧场水下巡检机器人耐压舱强度计算
为确保水下机器人工作时的安全性,防止因外力过大而导致的耐压舱强度不足问题,课题组基于有限元法,利用Ansys Workbench软件对水下巡检机器人耐压舱进行强度直接计算,并将其结果与规范值进行比较,确保其满足强度要求。
2.1 网格划分及约束条件
将1∶1的耐压舱三维模型导入到Ansys Workbench中,考虑到耐压舱模型整体并不大,故采用节点更多、精度更高的Solid186单元进行网格划分,示意图如图3所示。
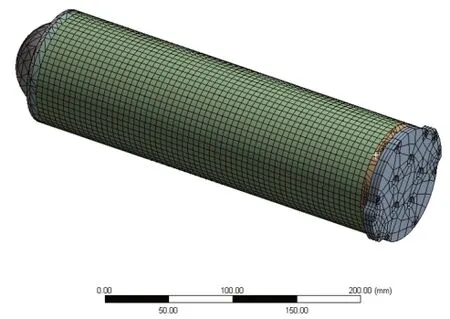
图3 耐压舱网格划分示意图
水下机器人约束条件施加参考《潜水系统和潜水器入级规范》[7],以耐压舱中面为对称面进行对称面约束,侧面施加位移约束(UX、UY、UZ)。外载荷仅考虑水压力作用,根据该水下机器人的使用需求,最大深潜高度为100 m,其外载大小依据式(1):

式中:ρ为耐压舱密度;g为重量加速度;h为下潜深度;n为安全系数,根据规范n=1.5[7]。
约束条件及载荷施加示意图如图4所示。

图4 约束条件施加示意图
2.2 耐压舱强度计算结果分析
基于Ansys Workbench对耐压壳进行屈服强度及刚度计算,结果如图5、图6所示。

图5 耐压壳结构强度有限元计算结果
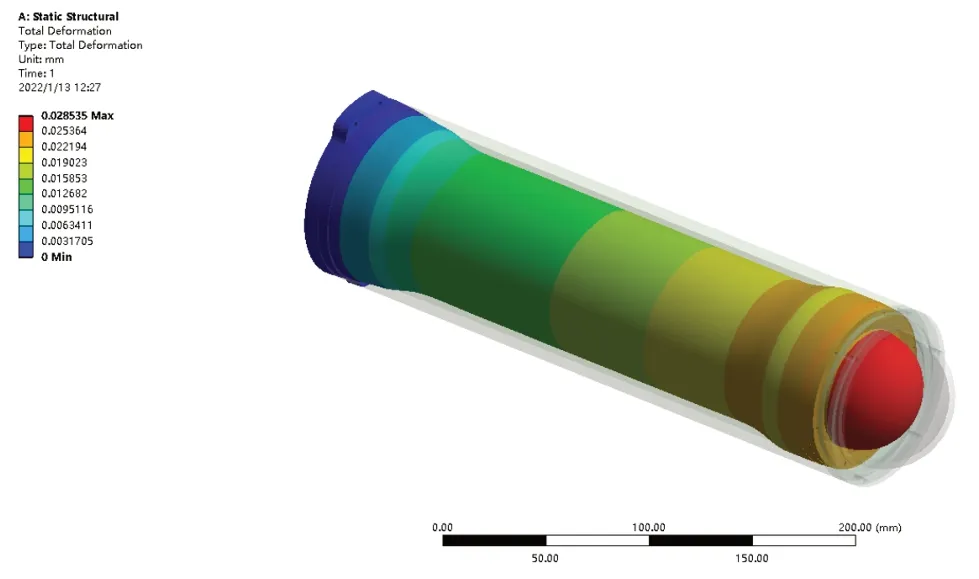
图6 耐压壳结构刚度有限元计算结果
根据图5的有限元计算结果,耐压舱最大应力值为96.01 MPa,根据《潜水系统和潜水器入级规范》[7],其许用强度公式见式(2):

依据式(2),许用强度[σ]=246.5 MPa,耐压舱最大应力值(96.01 MPa)小于许用值,故该耐压舱强度满足要求。
根据图6的计算结果,耐压舱的最大变形量为0.028 5 mm,铝合金材料延展率δ=11%,故该水下机器人耐压舱的刚度也满足规范使用要求。
3 海洋牧场水下巡检机器人耐压舱振动特性分析
由于各元件的运作、外载的作用及螺旋桨转动等因素,可能会使机器人耐压舱产生振动,从而影响工作性能[8]。故对耐压舱进行设计及力学特性分析时,除了要考虑强度和刚度的要求外,还要考虑水下巡检机器人的振动特性,避免在工作时产生共振现象[9-10]。故课题组基于Ansys Workbench对该机器人耐压舱进行模态分析,得出固有频率和振型来分析振动特性,以判别设计是否需要改进。
利用Ansys的modal进行模态分析,约束条件选择底部固定约束,得出该耐压舱的前6阶固有频率和相应振型。前6阶固有频率结果如表2所示,相应振型如图7至图10所示(因篇幅限制只给出第1阶、第4~6阶)。

图7 耐压舱第1阶振型
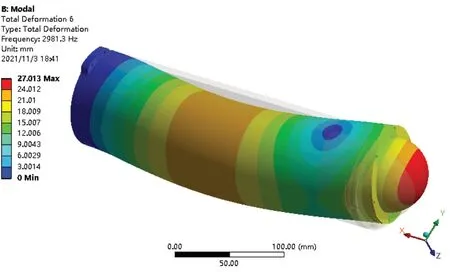
图10 耐压舱第6阶振型
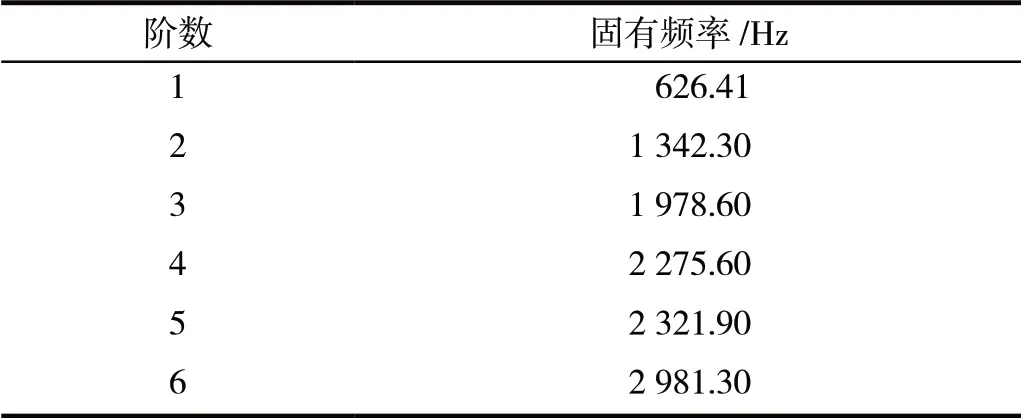
表2 水下机器人耐压舱模态分析结果
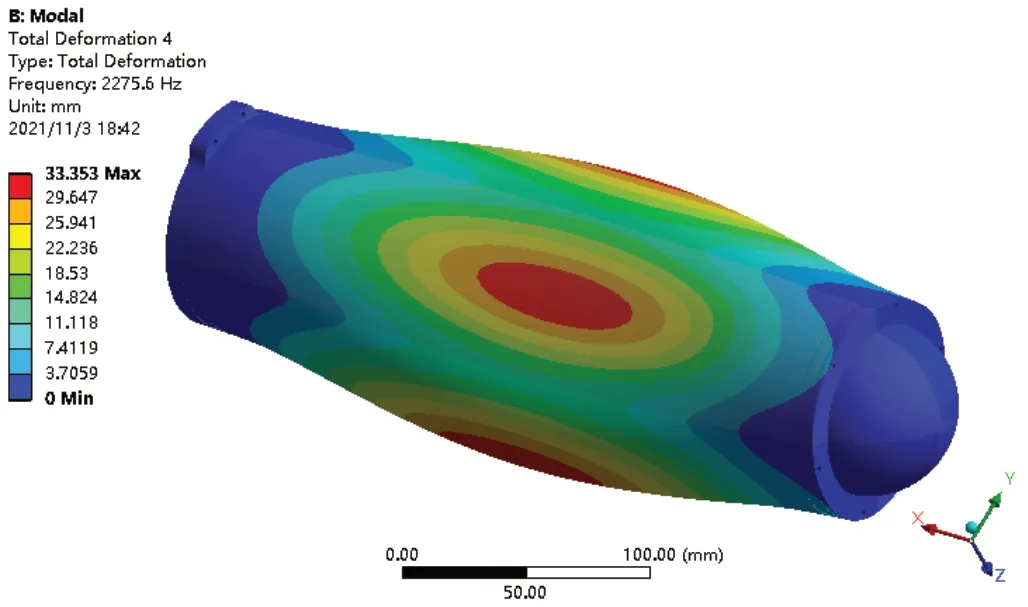
图8 耐压舱第4阶振型
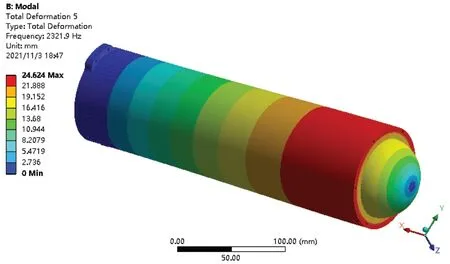
图9 耐压舱第5阶振型
外部激励频率依据文献[4]可得,计算见式(3):

式中:k为刚度系数,m为质量。
刚度系数k的求解,通过在有限元软件中施加1 N的进行刚度计算得到,变形量为0.13×10-9m,故最终的外部激励频率f=3 672.3 Hz。由表2模态分析计算结果可得,此耐压舱固有频率范围为626.41 Hz~ 2 981.3 Hz,远小于外部激励频率。故此耐压舱并不会产生共振效应,设计较为合理。
4 结语
课题组通过对海洋牧场水下巡检机器人耐压舱进行力学特性分析,可以得到如下结论:
1)该海洋牧场水下巡检机器人耐压舱的强度及刚度满足规范要求,可安全使用。同时,耐压舱前6阶固有频率远小于外部激励频率,不会产生共振,设计基本合理。
2)从结构强度计算可以看出,耐压舱最大应力值远小于许用应力值,留有较大的安全裕度,故此机器人耐压舱可以进一步进行结构优化,以节省成本。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
工业建筑(2022年2期)2022-06-29
舰船科学技术(2022年10期)2022-06-17
兰州交通大学学报(2022年2期)2022-04-26
舰船科学技术(2021年12期)2021-03-29
铁路技术创新(2020年6期)2020-02-25
空气动力学学报(2018年6期)2018-12-03
小天使·三年级语数英综合(2017年6期)2017-06-07
小天使·三年级语数英综合(2017年6期)2017-06-07
中学生数理化·高三版(2017年3期)2017-04-21
