
基于最小二乘积求解的高速公路桥梁形变监测
2022-02-09 02:22高江华韩春华韩志琴
计算机仿真 2022年12期
高江华,韩春华,郭 健,韩志琴
(昆明理工大学交通工程学院,云南 昆明 650500)
1 引言
随着国家经济建设的不断发展,跨河及跨海公路的建设数量逐日上升。高速公路是连接内陆与较远地区的重要交通网,桥梁为交通网提供最为关键的承载力量,对国家公路的建设与发展具有重大意义。桥梁的线性形状可以直观地反映桥梁的安全状况,形变即为桥梁发生危险的预警。若不及时整修,会出现连接点破损甚至桥面断裂等情况,不仅影响桥梁的使用寿命,还会产生重大损失及伤害。且当桥梁长时间受外界风力、风速、暴风雨等其它自然因素的影响,设置监测基地等常规方法会受到一定限制,存在着诸多不便。因此,通过小型便利的机械摄影设备进行监测显示出显著优势。
文献[1]提出一种基于精密点位系数定位的桥梁形变监测方法。采集桥梁中所有点的挠度、硬度及坐标位置等关键数据,通过长时间的监测分解计算,将监测点的数据根据时间变换关系,形成时间序列。在该序列下对监测前后的数据进行对比。但该方法可行性不理想,整体数据的运算量及耗用量较大;文献[2]根据一种三维激光扫描技术实现桥梁形变的监测。模拟桥梁的结构形状并放置在三维空间坐标中,通过各点的定位与各方向的变量情况,分析形变位移量。由于空间存在一定的不确定性,计算误差较大,监测精准度不高。
综合上述问题,本文通过一种倾斜摄影技术实现高速公路桥梁形变的精准监测。通过历史数据的分析计算挠度值,以降低后续形变程度的误判率。通过倾斜摄影点与监测点之间有关方向和距离的空间关系,得出逻辑清晰、计算简单的二分项监测方程,最后通过误差修正矩阵降低监测数据中的误差率。实验测试结果验证了所提方法所需运算量较小,监测准确度较高。
2 高速公路桥梁形变监测关键系数计算
目前,常用的桥梁形变监测方法主要有:光电成像[3]监测、全站仪[4]监测、红外激光[5]监测、GPS(Global Positioning System全球定位系统)监测以及倾斜摄影监测等。表1给出了上述几种方法在各方面测量情况的对比。
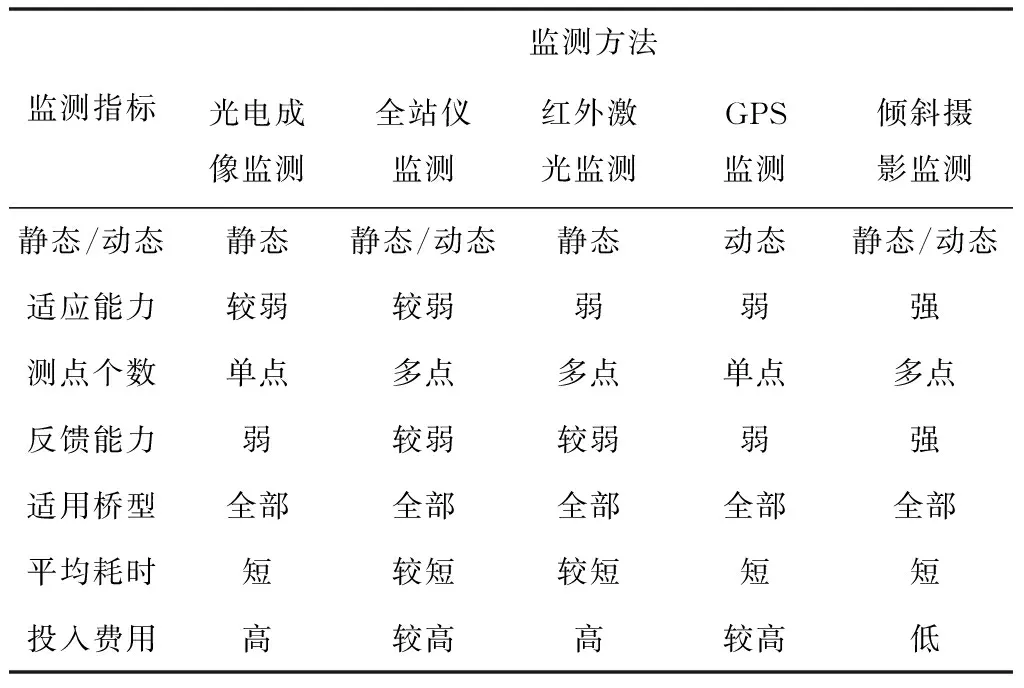
表1 常见桥梁形变测量方法对比
由表1可知,从能否实现静态或动态监测、外界因素影响适应能力、可监测数量、适应桥型以及限制概率多方面来看:光电成像监测、全站仪监测、红外激光监测以及GPS监测均可以准确监测静态或动态的桥梁形变,实时性及可靠性都较强。但存在耗费成本较高、限制性较大、受环境因素影响过大的缺点。
相比之下,倾斜摄影监测在拥有高精准的同时,还能保证快速的外界环境反应能力,后期需要额外投入的费用较低、不需要设立固定的参照点就能完成监测。并且还搭载了传感器装置,可将监测信息实时反馈至接收机制,数据的实时性较强,操作简单、方便管理,是监测技术首选。
用L表示整桥的长度;K为倾斜摄影装置数量;θi表示第i个监测点位置的倾斜角[6];yi表示第i个监测点位置的挠度值[7];t0表示任意时刻,在x监测位置根据力学公式得出挠度值为

(1)
其中
A(x)=(x-x1)(x-x2)
(2)
式中,gi(x)表示基函数[8],该函数在线性空间中基础维度为k-1,对式(1)进行求导可得

(3)
由于正常桥梁的倾斜角θ都较小,可根据角度推算得到
tanθ(xi,t0)≈θ(xi,t0)
(4)

(5)

(6)
通过该挠度值可精准确定倾斜摄影装备的监测位置,提高监测的实时性和准确性。
3 基于倾斜摄影的监测模型建立
考虑倾斜摄影仪接收信息会存在大气延迟[9]、时差[10]及各类误差因素的影响,以波长为单位对监测数据的相位进行表达
φ=λ-1(r-I+T)+f(δt0-δt(s))+E+εφ
(7)
式中,λ-1代表相位波长[11];f代表波长频率;r表示倾斜摄影仪器与桥梁之间的几何距离[12];δt0-表示误差延时;δt(s)表示接收误差;E表示模糊度;I表示空气延时;T表示测试周期;εφ表示监测误差。
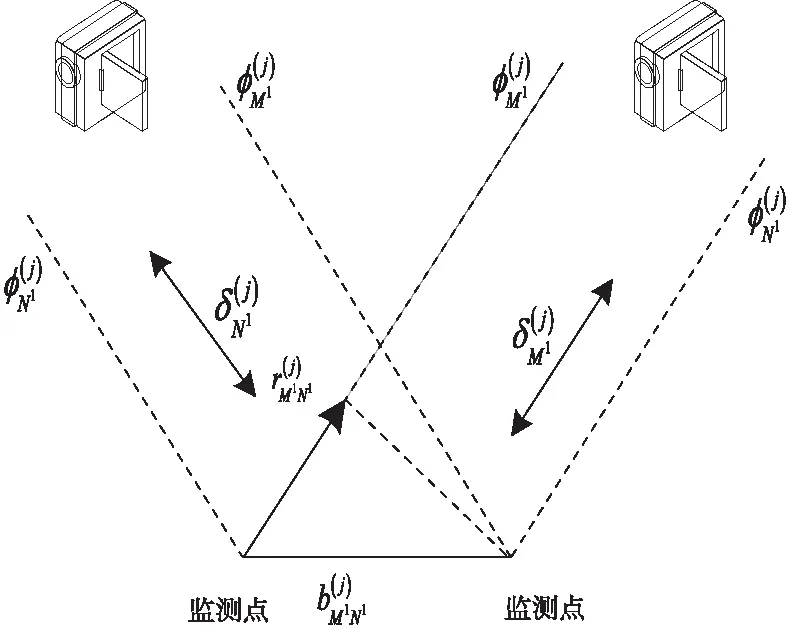
图1 倾斜摄影仪与监测点间几何关系示意
如图1所示,M1点为倾斜摄影仪器;N1为监测站点。计算监测站点N1与倾斜摄影仪器M1之间的距离差为

(8)


(9)
根据该关联关系求解得到基于二次差分的监测方差公式为


(10)

为了方便后续的计算与数值输出,将式(10)简写为
V=Xξ+YZ-1
(11)
式中,ξ表示对坐标中未知数量修正后的正值。
基于上述计算得出倾斜摄影监测数据输出的随机模型为

(12)
式中,G1表示随机值;Q1表示在第一点位的监测数据。
将式(10)给出的方程式进行系数阵列逆转可得到

(13)
基于此,对该公式进行求解就可得到最终的监测结果。
4 监测误差校正
在一般的监测算法中,监测结果大多都会受到噪声与误差影响,为提高监测结果的精准性,对监测信号的噪声量进行平滑处理[15]。
建立一种误差校正方程为

(14)
其中,O表示校正系数;HT表示在一个周期T内校正误差值

(15)

建立误差校正基准网,将监测点放入通过基准网中进行可靠性分析,如表2所示。
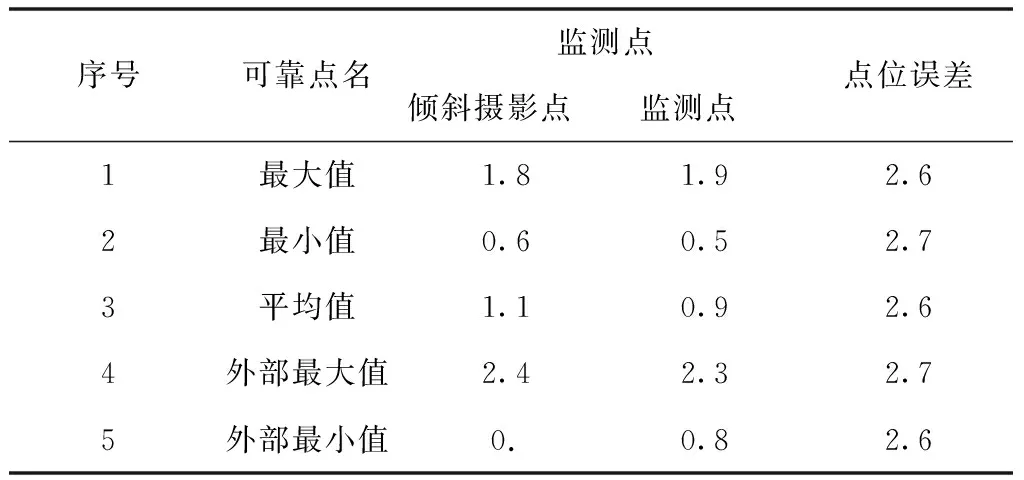
表2 四点可靠性判定基准网/mm
由表2可知,四点基准网共包含5项可靠性评价指标,分别为最大值、最小值、平均值以及外部最大值及最小值。通过这5项指标的评估,可将高速公路桥梁形变的可靠性控制在最高。
5 仿真研究
5.1 仿真背景
仿真对象为湖南省焦作市某高速公路的中型桥梁,摄影仪器选用的是YRH650款红外热成像仪。共设立4台,分别以桥梁内部拱肋桥墩的东南角、东北角、西北角以及西南角四个位置作为参考点,4台摄影仪之间距离位置相同。在地面上四点映射的中心位置放置一台信号传感器,用于接收摄像器监测到的信息数据,保证四台摄像仪数据传输的实时性和同步性。
数据采集时间为2020年6月20日至21日,大桥总长为1000m、桥面宽为40m。在高速公路大桥的运营过程中,倾斜摄影仪在正常的视觉观测位置的四角处进行拍摄监测,桥梁示意如图2所示。

图2 仿真高速公路桥梁示意图
5.2 东南位置形变位移监测结果对比分析
为了方便仿真的测试与数据管理,将本文倾斜摄影仪在东南角、东北角、西北角以及西南角四个位置的监测数据,分为东南方向和西北方向两个方面进行对比测试。并与实测数据以及精密单点定位监测法、三维激光扫描监测法实现双重检验,准确合理地判定本文方法对高速公路桥梁形变监测的有效性。
实测数据来自PostgreSQL(关系型数据库管理系统)该数据库内包含大量地质建筑信息,覆盖率广、信息可靠性强,仿真结果如图3所示。
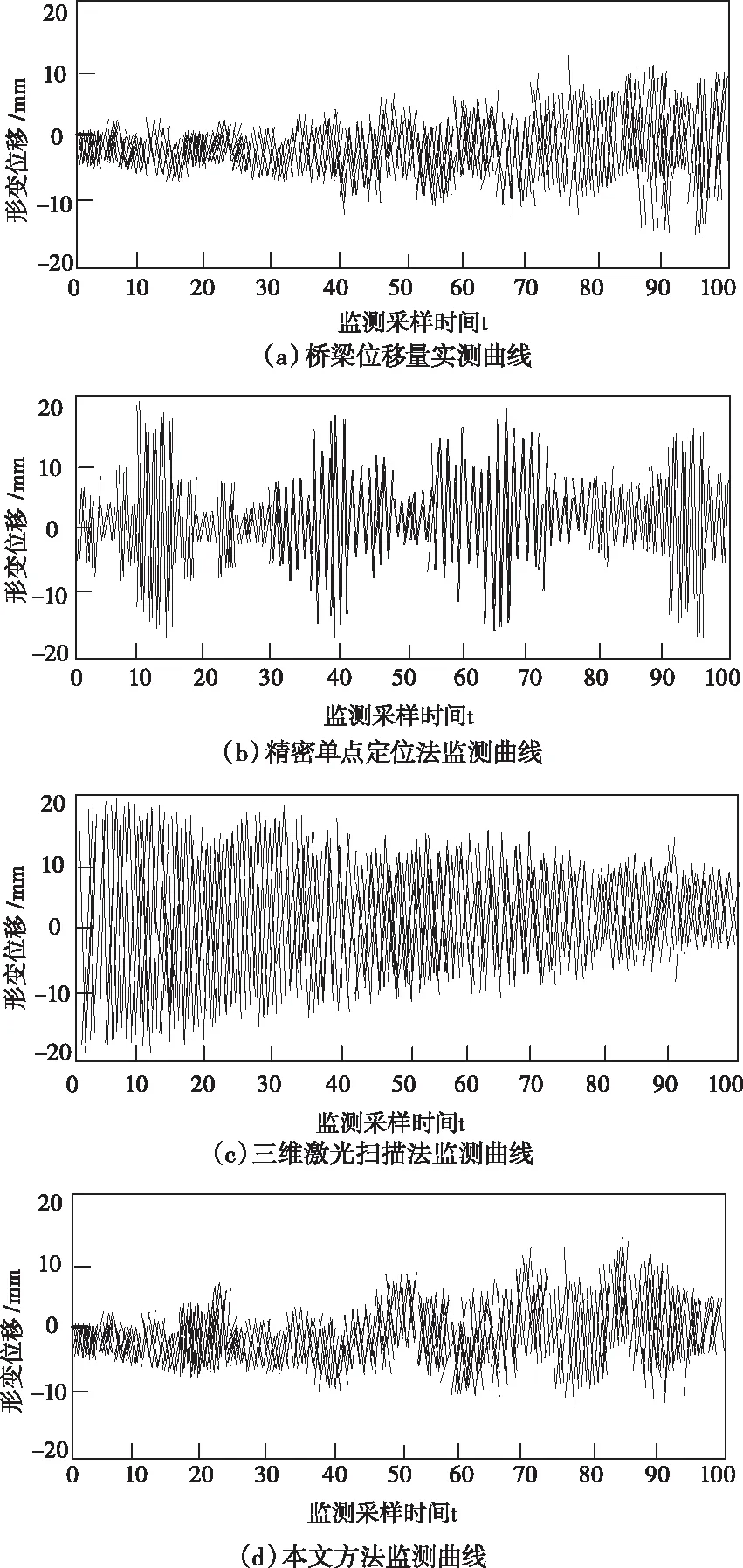
图3 东南坐标方向桥梁位移监测对比结果
从图3中(a)可以看出,实测的高速公路桥梁形变位移曲线变化幅度不是很大,存在实质的形变现象,随着监测时间的增长,形变位移幅度也在逐步变大。说明桥梁可能受到暴风、暴雨等外界自然受力压迫或因年久失修等因素而导致出现形变破裂,并且不是短时间紧急情况导致的形变,而是一个随时间平稳变化的过程。
图3(b)精密单点定位法的形变位移幅度较大,整体曲线呈现过高的波动趋势。说明,桥梁中的支撑结构出现了严重的形变,该结果与实际桥梁的形变情况不符,监测结果不准确;图3(c)三维激光扫描法的监测形变位移曲线则呈现先增长后下降的趋势,这表明,该方法监测到在测试的前半段时间内未出现形变现象,而在后半段的时间内,桥梁因受到了外界压力,而发生了形变。与实测结果相比,显然该方法存在一定的监测误区,监测误差较大,与实测结果不吻合;而反观本文方法(d),整体曲线呈现小幅度增长的趋势,表明,桥梁一直都存在形变趋势,只是随着时间的增长,形变情况愈发明显。与实测结果对比,二者结果表达一致,曲线的吻合度较高,说明,本文方法具有一定的有效性和准确性。
5.3 西北位置形变位移监测结果对比分析
对于西北位置三种方法监测结果如下图4所示。

图4 西北方向桥梁位移监测对比结果
从图4中(a)图可以看出,与东南方向的监测曲线不同,由于桥梁地理位置处于平原地区,常年受到西北风的影响。形变幅度更大,所以,为了便于观察采用了多线段形式进行表达。
从图4中(b)、(c)、(d)图可以看出,本文方法的监测结果是三种方法中与实测曲线吻合度最高的,曲线波动变化与实测曲线基本保持一致;而另外两种方法则是出现了过高形变量和过低形变现象,均与原始数据表达不相符,说明,二者的监测精准度较低。出现这种现象的主要原因就是,过多地考虑监测时效性问题,忽略了外界因素影响,导致监测误差增大。
6 结论
本文给出了基于倾斜摄影的高速公路桥梁形变监测仿真。通过历史桥梁形变关键参数的计算得出判定挠度值,以此为基础,建立基于倾斜摄影的桥梁形变监测模型。方法具有一定的自适应能力,逻辑表达清晰、简单直观,运算量小易实现。从实验结果可以看出,本文算法监测精准度高、时效性强,在同等实验环境中,监测值与实测值贴合度最高,且不受外界环境影响,实用性较强。
猜你喜欢
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
铁道建筑技术(2021年6期)2021-07-12
水电站设计(2020年4期)2020-07-16
科学技术与工程(2020年36期)2020-02-04
江西建材(2018年4期)2018-04-10
小学阅读指南·低年级版(2017年11期)2017-12-06
中国交通信息化(2016年9期)2016-06-06
小说月刊(2014年4期)2014-04-23
