应用无人机船台检验船舶航行信号灯的研究
2022-02-08 07:05熊元元
广东造船 2022年5期
匡 倩,熊元元,阮 磊
(舟山中远海运重工有限公司,舟山316131)
1 前言
造船是一个系统工程,从初步设计开始一直到完工交付,每一个环节都不可缺少,每一个阶段都很重要。特别是创新技术的应用,壳舾涂一体化的推广与应用,为造船业发展奠定了坚实的基础。中国造船业已进入快速发展通道,加快网络技术应用、加大科研投入、减少不必要的人力物力,用科学的造船方法提高国际竞争力是必然趋势。无人机由于具备高效性、节能性、风险性低等优点,被广泛应用于各个领域[1]。应用无人机在船台阶段对船舶航行信号灯进行检验工作,消除了传统在海上报验的安全隐患及拖轮油耗等问题,也为船级社检验船舶航行信号灯积累了经验,为今后新造船项目航行灯效用检验奠定了操作基础。
2 船舶航行信号灯检验的种类
船舶在船台总组、搭载结束后,进行部分舾装作业,同时完成航行信号灯的安装工作;在船台阶段需要对所有的航行信号灯进行报验,其报验信号灯的种类分为:失控灯、桅灯、舷灯、尾灯。在船台上借助无人机测量观察失控灯、桅灯、舷灯、尾灯角度和可见度,对报验出现角度或亮度有问题的航行信号灯进行现场调节,直至满足船级社要求。
3 船舶航行信号灯检验所需的工具和材料
船舶搭载和涂装结束,需要在船台上完成航行信号灯的检验。配合船舶航行信号灯检验所需的工具有:无人机、智能手机、5G 网络、活络扳手、全站仪、100 m 卷尺、激光笔和划线石笔等,所需材料有:自喷漆、抹布、酒精、清洁泥等。
4 船舶航行信号灯检验的方法
无人机通过遥控器的控制指令,在船舶航行信号灯检验区域飞行。检验前,在船台中心线板上,沿全船长作出船体中心线[2];根据船体中心线绘制船舶两侧的参考线,然后根据航行信号灯的角度绘制航行信号灯角度线,此角度线与参考线交点即为无人机的水平投影位置;本司船台坡度为1:20,根据交点计算航行信号灯的水平高度,若交点在航行信号灯之上则需要加上坡度差,反之则要减掉坡度差;然后打开船舶航行信号灯,调整灯的角度,直至航行信号灯临界照射角度线与无人机重合,达到检验合格的标准。
船舶在船台的俯视图及检验坐标系,如图1 所示。

图1 船舶航行信号灯检验点坐标系
尾灯角度为135°、后桅灯角度225°、前桅灯角度225°、左右舷灯角度112.5°,在船台两侧画两条对称的参考线,确定检验坐标系A/A1、B/B1、C/C1、D/D1、B2/B2、B3/B3,此坐标点即为无人机的垂直投影点,作为检验基准。其检验方法如下:
(1)根据水平船坞还是倾斜船台画参考线,信号灯的角度画位置线;
(2)水平船坞信号灯角度线与参考线交点无高度差,倾斜船台则需要根据船台坡度计算交点的高度差;
(3)航行信号灯的角度线与参考线的交点,即为无人机的水平投影位置。将信号灯的角度线与参考线的交点,根据现场放样绘制在相应的地面上,确定交点A、A1、B、B1、B2、B3、C、C1、D、D1。其中,ABCD 分别代表前桅灯、舷灯、后桅灯及尾灯的角度线;1 代表左侧;无代表右侧;B2、B3 为舷灯1°~3°之间灯光减弱,3°时灯光消失的位置点;
(4)根据航行信号灯的实际高度,确定交点A、A1,B、B1、B2、B3、C、C1、D、D1 的高度值:航行信号灯与参考线交点在坡上的,需要减掉坡度差,反之加上坡度差;
(5)交点及高度值就是信号灯检验过程中无人机的高度位置及水平投影位置,根据无人机的位置调节航行信号灯的角度;
(6)用遥控器操作无人机,飞至指点的位置,通过视频调节航行信号灯的角度;
根据上述方法,航行信号灯安装接线结束,满足检验要求。如果不满足要求则修改灯具底座或重新打孔,修改后进行复检。
检验航行信号灯时,正确选取观测位置,确保周边空旷,避免影响无人机飞行及观测;根据船舶在船台建造的坐墩位置,参照厂区布置图绘制检测坐标系,并对无人机飞行高度进行标注,出具检验程序;根据点位图,对观测点进行定位,必要时使用全站仪进行辅助,用红色自喷漆标记;在坐标点用无人机检验航行信号灯角度是否满足要求,调节辅助挡板,直至航行信号灯角度满足规范要求。
5 船舶航行信号灯检验的基准
根据船舶航行信号灯角度范围确定坐标系后,需要通过无人机点对点进行检验,此时需要绘制检验表格,舷灯首向1°~3°角观测点按表格示意测量,如表1 所示。

表1 无人机检验航行灯测量表
根据航行信号灯的实际高度,确定每个交点A、A1、B、B1、B2、B3、C、C1、D、D1 的高度值;航行信号灯的实际高度即为航行信号灯在船上实际安装位置以船台面为基准的高度值。当倾斜船台时,交点的高度值为:航行信号灯交点在坡上需要减掉坡度差,反之则要加上坡度差。以后桅灯、舷灯为例,确定C、C1、B2、B3 的高度值,船台坡度为1/20,即后桅灯高度值H2 已知,H1=C=C1=H2+N×(1/20);根据相同方法,确定交点A、A1、B、B1、C、C1、的高度值。经过计算可以看出:无人机检验航行信号灯时,只要划出参考线、确定距船体中心线的垂直距离,就可以计算出任意坐标点的坐标值,从而确定无人机的精确飞行位置。
6 船舶舷灯的检验
按照舷灯位置进行观测点位置计算:舷灯在斜船台上高度值h1 已知,h2= B2=B3= h1- L×(1/20);舷灯距船体中心线是固定值M,在舷灯船首方向空旷位置选取几组参考线,距舷灯的垂直距离为30 000 mm、50 000 mm、80 000 mm、Lmm,按照船舶在坞内的位置,在以下测试数据中选择一组(表2),左右舷是对称的,都需要进行观测并记录;1°~3°之间灯光减弱,3°时灯光消失,3°夹角距船体中心线距离为D、1°夹角距离为E,在船首方向有一根垂直船体中线的参考线,舷灯与参考线的垂直距离为L,船舶半宽值为M,即B2= M-Ltan3°、B3= M-Ltan1°,如表2 所示。
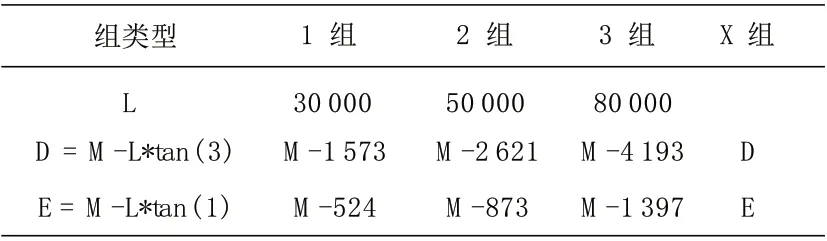
表2 每组检验数值计算表 单位:mm
根据无人机检验获取的数据与理论计算值相比,没有大的出入即为检验合格。
7 船舶航行信号灯检验作业基准
为了更好地规范船舶航行信号灯检验的基准,需要按照流程进行施工,其检验施工流程如下:
(1)船舶航行信号灯安装接线结束,本体挡板角度正确,颜色无误,哑光漆完工,调节挡板安装结束,完整性满足报验要求;
(2)根据船体中线,使用全站仪对航行信号灯安装进行检验,确保平行于船体中线;
(3)如安装不满足要求,修改灯具底座或重新打孔,修改后进行复检;
(4)选取观测位置,确保周边空旷,避免影响无人机飞行及观测;
(5)根据船舶坐墩位置参照厂区布置图绘制观测点坐标系,并对无人机飞行高度进行标注,出具报验程序;
(6)根据点坐标系,对观测点进行定位,必要时使用全站仪进行辅助,用红色自喷漆标记;
(7)在观测点用无人机检测航行信号灯角度是否满足要求,调节航行信号灯的辅助挡板,直至角度满足规范要求。
(8)无人机飞行的各种数据进行校核,将最终的检验数据填写到表1、表2 中,最后提交检验,经船东、船检、船厂三方签字认可,完成船舶航行信号灯在船台的检验工作。
8 结束语
应用无人机在船台检验船舶航行信号灯的应用研究过程中,要大胆创新,规避风险(该风险主要包括:大雾风险、故障风险、电磁和信号干扰风险、回收风险等[3]),不断完善优化。通过无人机对船舶航行信号灯进行检验,节省了检验时间,提高了检验安全性、降低了检验成本,具有重要的经济效益与社会效益。
随着我国科技水平的不断提升,相信在不久的未来,无人机应用于造船检验工作将更加广泛,进而实现无人机代替传统的检验工作,对提高船舶建造效率起着重要的作用。
猜你喜欢
中国药业(2021年12期)2021-06-28
珠江水运(2021年10期)2021-06-24
工程与建设(2019年2期)2019-09-02
小学科学(学生版)(2019年3期)2019-03-30
戏曲研究(2018年1期)2018-08-29
财会学习(2018年22期)2018-08-22
小天使·一年级语数英综合(2018年6期)2018-06-22
科学与财富(2017年35期)2018-01-29
华人时刊(2016年19期)2016-04-05
广东造船(2015年2期)2015-02-06