
无人机旋翼风场作用下雾滴在水稻植株上的黏附量模型构建
2022-02-07 01:37张海艳兰玉彬陈春玲许童羽陈盛德
农业工程学报 2022年18期
张海艳,兰玉彬,文 晟,陈春玲,许童羽,陈盛德
无人机旋翼风场作用下雾滴在水稻植株上的黏附量模型构建
张海艳1,兰玉彬2,3※,文 晟4,陈春玲1,许童羽1,陈盛德2,3
(1. 沈阳农业大学信息与电气工程学院,沈阳 110866;2. 华南农业大学电子工程学院(人工智能学院),广州 510642;3. 国家精准农业航空施药技术国际联合研究中心,广州 5106422;4. 华南农业大学工程学院,广州 510642)
为了探究植保无人机旋翼风场对雾滴在水稻植株上黏附量的影响规律,该研究以大疆T30植保无人机为施药平台,分别以清水、1%迈飞和0.5%迈图Target助剂溶液为喷洒溶液,基于航空风洞和粒子图像测速系统(Particle Image Velocimetry,PIV)测量了植保无人机旋翼风场作用下的雾流场、溶液的动态表面张力、黏度和密度以及雾滴在水稻叶片表面的动态接触角,分析了植保无人机旋翼风场对雾滴沉降速度的影响,以及飞防助剂对溶液性质参数、喷嘴雾化性能和雾滴在水稻叶片表面润湿铺展能力的影响规律。在此基础上,结合雾滴拦截模型和雾滴与作物叶片表面碰撞模型,建立了应用于植保无人机施药技术领域的雾滴黏附量预测模型,并对模型计算的准确率进行了田间验证试验。试验结果表明,助剂溶液对溶液性质、喷嘴雾化性能、雾滴在水稻叶片表面的润湿铺展能力以及雾滴在水稻植株上的黏附量方面均有不同程度的影响。与清水溶液相比,添加1%迈飞与0.5%迈图Target助剂溶液后,溶液表面张力分别降低了46.81%、62.21%;喷嘴雾化雾滴的粒径均呈增大趋势,约增大9.3%;雾滴在水稻叶片表面的接触角分别降低了27.74%、46.37%;雾滴在每公顷水稻植株上的黏附量分别增加了800.78%和1 051.49%。无人机旋翼风场对雾滴沉降速度和雾滴在水稻植株上的黏附量均有明显影响,旋翼系统开启后,雾滴沉降速度明显增加,且更快达到稳定运动状态,当无人机旋翼转速由0增加至1 000、1 800 r/min时,雾滴沉降速度分别增加了366.67%、663.67%。与旋翼关闭状态相比,旋翼系统开启后,1%迈飞和0.5%迈图Target助剂溶液在水稻植株上的黏附量分别降低了26.78%和29.75%。本文建立的黏附量模型预测清水、1%迈飞和0.5%迈图Target 3种溶液在水稻植株上黏附量的准确率分别为48.59%、79.07%和79.29%。该研究为植保无人机对水稻进行施药作业时筛选助剂提供理论参考与指导,并提供旋翼风场作用下雾滴在水稻植株上黏附量的预测模型。
无人机;模型;助剂;旋翼风场;黏附量模型
0 引 言
农药是农业增产丰收的重要保障。现阶段,化学防治依然是农业上控制作物病虫草害的重要手段[1]。目前,中国农药的利用率比较低,数据显示,截至2020年底,中国水稻、小麦、玉米三大粮食作物的农药利用率为40.6%[2]。农药利用率低不仅会导致农药浪费和防治成本升高,而且会产生环境污染和生态破坏等问题[3]。农业航空技术作为高工效作业的关键技术之一,是实现和保持农药零增长的重要手段[4]。
植保无人机施药技术是农业航空技术的重要组成部分。近10年,中国植保无人机的数量和作业面积快速增加,应用的农作物范围也越来越广[5-6]。作为新兴的施药技术,其施药效果备受关注,自植保无人机施药技术兴起到现在,研究者针对植保无人机的施药效果开展了大量的研究工作,这些研究工作主要关注雾滴的分散情况[7-8]、雾滴在靶标区域的沉积情况[9-12]、在非靶标区域的飘移趋势与飘移量[13-15]、植保无人机旋翼风场的分布规律[16-19]和植保无人机旋翼风场对作物冠层的扰动情况等[20-21]。
农药从药箱到作物再到发挥药效主要经历雾化、沉积、黏附、吸收和传输等5个过程[22]。目前,国内研究者对植保无人机施药效果的研究主要集中在药液雾化与沉积过程,对雾滴在靶标作物上的黏附量的关注度不够。对于通过茎叶吸收发挥药效的农药来说,雾滴的黏附过程非常重要。因此,在研究与评价植保无人机施药效果时,将雾滴黏附过程考虑在内是十分必要的。
该研究的主要目的是关注植保无人机喷洒雾滴在作物植株上的黏附过程和最终的黏附量。由于雾滴粒径、雾滴沉降速度和雾滴在作物叶片表面的润湿铺展能力是影响雾滴在作物植株上黏附过程和最终黏附量的主要因素[23-25],助剂溶液可以改善雾滴在作物叶片表面的润湿铺展能力,同时植保无人机旋翼风场对雾滴沉降有明显的辅助作用,进而影响雾滴的沉降速度,继而影响雾滴在作物植株上的黏附量。因此,该研究以大疆T30植保无人机为施药平台,以清水、1%迈飞和0.5%迈图Target助剂溶液为喷洒溶液,以水稻为喷洒对象,一方面,关注和分析植保无人机旋翼风场对雾滴沉降速度和雾滴在水稻植株上黏附量的影响,另一方面,测量并分析助剂溶液对溶液性质、喷嘴雾化性能、雾滴在水稻植株上润湿铺展能力和雾滴在水稻植株上黏附量的影响。最后,基于上述研究内容与雾滴拦截和碰撞模型,提出预测植保无人机喷洒雾滴在水稻植株上黏附量的模型,并通过试验验证模型的预测精度。
1 模型描述
药液由药箱至黏附到作物叶片表面主要经历喷嘴雾化、沉降、被作物冠层拦截和与作物叶片表面发生碰撞等4个过程。雾滴被作物冠层拦截和与作物叶片发生碰撞是决定雾滴在作物植株上黏附量的2个关键过程,本文提出的雾滴黏附量模型主要由雾滴拦截模型和雾滴碰撞模型组成,描述喷嘴雾化性能的雾滴粒径与速度是这2个模型的主要参数之一。
1.1 雾滴拦截模型
雾滴粒径、雾滴沉降速度、雾滴进入冠层的角度和作物冠层缝隙大小等因素直接影响作物冠层对雾滴的拦截概率。部分田间试验的测试结果表明,粒径越小的雾滴越有潜力穿透作物冠层,沉积到冠层的较低处,甚至穿透整个冠层,沉积到非靶标区域[26-27]。
本文根据水稻株高,将水稻冠层划分为6个子冠层,基于植物冠层分析仪依次测量水稻各个子冠层边界处的叶面积指数(Leaf Area Index,LAI),计算各个子冠层之间的叶面积指数增量ΔLAIk以Teske等[28]建立的作物冠层模型计算阳光穿透水稻1个子冠层的概率P为

式中是阳光或雾滴轨迹的天顶角,(°),定义为[28]
式中、分别为雾滴水平、竖直方向速度,m/s。
雾滴穿透水稻子冠层的概率P为[28]

式中为作物收集雾滴的效率,其经验公式为[29]
式中为Stokes数,定义为[29]

式中为雾滴沉降速度,m/s;为溶液密度,kg/m3;为空气动力黏度,Pa·s;d为叶片直径,m;为雾滴粒径,m;
雾滴被水稻冠层拦截的概率为
1.2 雾滴与水稻叶片的碰撞模型
雾滴与作物叶片发生碰撞行为后,可能产生黏附、反弹和喷溅等结果[30]。发生喷溅的雾滴在碰撞表面上的黏附量对雾滴在碰撞表面上最终的黏附量有不可忽略的贡献[31]。因此,雾滴在作物植株上的黏附量由两部分组成,一部分是与作物叶片发生碰撞后直接黏附到作物植株上的雾滴体积,另一部分是碰撞到作物叶片表面后发生喷溅的雾滴在作物植株上的黏附量。本文模型计算的雾滴在作物植株上的黏附量是上述两部分雾滴的体积和。
1.2.1 雾滴反弹模型
Mao等[32]基于雾滴与靶标表面碰撞过程中关键阶段的能量变化和能量守恒定理建立的雾滴最大铺展直径与雾滴能量间的关系方程为

式中θ是雾滴接触角,(°);d是雾滴最大铺展直径,m;是韦伯数;是雷诺数;
其中

式中是溶液动态表面张力,N/m;是溶液黏度,Pa·s。
基于能量守恒定理推导出雾滴在靶标表面上完成完整的铺展和回缩过程后剩余动能(k,N·m)的计算式为[33]
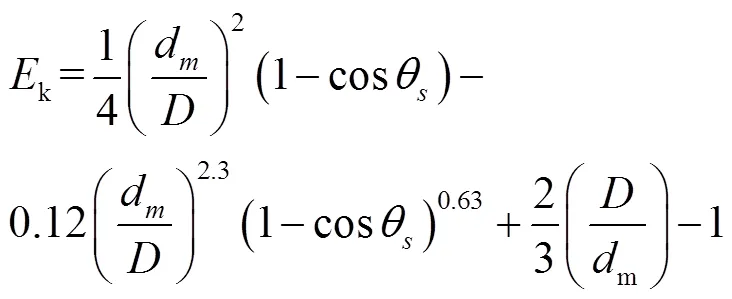
如果k计算结果为正,意味着雾滴还有剩余动能,即,雾滴将发生反弹;如果k的计算结果小于等于0,意味着雾滴没有剩余的动能,即,雾滴将发生黏附行为。本文基于此雾滴反弹模型判断雾滴与水稻叶片的碰撞结果。
1.2.2 雾滴喷溅模型
当前比较认可的雾滴发生喷溅的原理是,在雾滴铺展过程中,如果雾滴的惯性力克服了溶液的毛细作用,那么,雾滴将发生喷溅[34-35]。基于该理论,建立经验关系式(11)[36]。

如果雾滴碰撞参数值大于crit,雾滴将会发生喷溅,否则,雾滴或发生反弹或发生黏附。crit是一个与雾滴和碰撞表面性质相关的参数,在不同应用中,crit值不同。所以,每次试验中的crit值需要由其试验数据拟合获取,耗时耗力。2010年,Forster等[37]基于测量标准溶液的接触角来估计crit值,即:

式中50%acetone为质量分数50%的丙酮溶液在疏水性作物叶片上的静态接触角,(°)。
由于溶液性质直接影响发生喷溅雾滴在作物植株上遗留的体积比率,因此,本文选用的清水、1%迈飞和0.5%迈图Target 助剂溶液雾滴与水稻叶片碰撞并发生喷溅时,其在水稻叶片表面上的遗留体积比率不同。
清水雾滴在超疏水性水稻植株上的黏附率基本属于最低黏附率的范畴,因此,采用1.2小节描述的雾滴与水稻叶片碰撞模型计算完清水雾滴在水稻叶片表面的碰撞结果后,采用最低黏附率10%计算发生喷溅的清水雾滴在水稻植株上的遗留量[38]。
溶液表面张力和雾滴在作物叶片上的接触角是影响雾滴与作物叶片表面碰撞结果的关键因素。本文采用的0.5%迈图Target助剂溶液的表面张力及其雾滴在水稻叶片表面的接触角均与文献[39]中0.1%OS助剂溶液的表面张力及其在Teflon表面的接触角接近。因此,本文采用文献[39]中0.1%OS助剂溶液雾滴在Teflon表面发生喷溅后,喷溅雾滴在Teflon表面上的黏附率(70%)计算本文0.5%迈图Target助剂溶液在水稻叶片表面发生喷溅时,其在水稻植株上遗留的体积[39]。
同理,1%迈飞助剂溶液的表面张力介于文献[39]中0.1%OS和LM两种助剂溶液的表面张力之间,雾滴在水稻叶片表面的润湿铺展能力也介于上述两个助剂溶液在Fat-hen叶片表面的润湿铺展能力之间。两种助剂溶液在Fat-hen叶片表面发生喷溅时,发生喷溅的雾滴在Fat-hen叶片表面黏附率的平均值为55%[39]。因此,本文采用55%计算1%迈飞助剂溶液在水稻叶片表面发生喷溅时,其在水稻植株上的遗留体积。
由于雾滴在超疏水性表面以发生喷溅为主,基本不发生反弹,因此,本文忽略了发生反弹雾滴对雾滴在水稻植株上黏附量的贡献。上文描述的雾滴黏附量模型的执行过程参见图1。

图1 雾滴黏附量模型的执行流程图
1.3 模型参数测定方法
为获取模型的主要参数,采用试验方法对水稻各个子冠层的叶面积指数LAI、雾滴粒径、雾滴沉降速度、溶液表面张力、黏度、密度和雾滴在水稻叶片表面的接触角等参数进行测量与数据分析。
1.3.1 LAI
水稻冠层叶面积指数是在模型田间验证试验时于同一片水稻田采集。试验时的水稻株高约为76 cm,将距离地面16 cm的部位作为水稻冠层起点,并将水稻冠层平均划分为6个子冠层,每个子冠层高度为10 cm。
为了避免水稻长势差异导致的LAI值的差异影响,在水稻田内随机选择6个点区域,采用 CI-110 数字植物冠层图像分析仪( CID Bio-Science,Inc. USA)依次测量每个点区域处水稻6个子冠层边界处的LAI值,并将6个点区域的测量结果取平均值作为水稻每个子冠层边界LAI值的最终测量结果。
1.3.2 雾滴粒径与雾滴谱
本文基于航空风洞实验室配置的喷洒系统,包括水箱、隔膜泵、调压阀、压力表和水管连接件等配件(图 2a),采用珠海欧美克公司的DP-02型激光粒度仪测量了Teejet公司的XR11001VS喷头(T30植保无人机喷洒系统的标配喷头)在(0.4 MPa压力)流量为450 mL/min条件下的雾滴粒径分布。

在雾滴谱测量过程中,喷头喷洒方向与激光发射方向垂直。喷头至激光粒度仪光路的距离为35 cm。为了采集整个扇面内的雾滴信息,在雾滴信息采集过程中,纵向移动喷头,使激光粒度仪按图2b所示位置,逐点采集雾滴信息,每个点持续采集1 min,单次测量时间9 min,每个喷洒溶液均进行3次雾滴谱测量,取3次测量结果的平均值作为最终结果,并要求3次测量结果的标准差小于5%。
1.3.3 雾滴沉降速度
本文基于PIV系统获取了大疆T30植保无人机旋翼风场作用下喷嘴下方0.8 m范围内(旋翼下方1.2 m范围内)的雾流场(包含雾滴位置和速度等信息),基于安全考虑,并未直接获取大疆T30植保无人机真实悬停状态下的雾流场,而是将大疆T30植保无人机的旋翼与其喷洒系统拆下并安装到实验室室内植保无人机喷洒两相流平台上,以此平台仿真大疆T30植保无人机真实的悬停状态,并基于PIV系统获取旋翼与喷洒系统在该平台上平稳工作条件下的雾流场。
本文采用的PIV系统主要由服务器、CCD相机、激光器、片光源和同步器等部件组成(图3)。CCD相机的满分辨率为4 M(2048×2048),满帧率为32帧/s,双曝光时的时间间隔为190 ns,且自带50 mm/F1.8镜头,能在感兴趣流场区域形成500 mm×500 mm的视场;双腔双频Nd:YAG激光器可以连续发射2个380 mJ的激光脉冲,最大发射频率为15 Hz,激光脉冲的波长为532 nm。

1.服务器 2.同步器 3.CCD相机 4.喷头 5.两相流可视化平台 6.旋翼 7.双腔YAG激光器
试验进行时,相机放置于雾流场前1.12 m处,光轴垂直于待测雾流场,在此相机与雾流场距离条件下,获得的雾流场测量区域(长×宽)为381 mm×381 mm。片光源放于雾流场侧面1 m处,激光平行穿过雾流场,垂直相机光轴,并且,此距离内激光到达雾流场区域时的厚度刚好为1 mm,最适合流场测量。连续的两束激光脉冲时间间隔设置为50s,脉冲重复率设置为7.5 Hz,查询窗口设置为32×32(像素)。
受PIV系统单次测量范围的限制,本文描述的喷头下方0.8 m范围内的雾滴雾流场分两次测量完成,第一次测量喷头下方0.4 m范围内的雾流场,第二次测量喷头下方0.4~0.8 m范围内的雾流场。
1.3.4 接触角及crit的确定
本文采用普赛特PT-705-B标准光学接触角仪测量了3种喷洒溶液和质量分数为50%的丙酮溶液在水稻叶片表面上的接触角。由于水稻叶片离体后易失水萎蔫,因此,本试验采取非离体叶片进行测试,从田间随机选择5穴水稻植株移栽至室内,保持其生长状况良好,测试时裁取叶片置于试验平台,如图4所示。测试滴液量为3 μL,液滴完全脱离滴液系统至水稻叶片表面后,每1 s截取一张图片至60 s,基于雾滴在水稻叶片上60 s内的前进接触角变化来分析3种溶液在水稻叶片表面的铺展能力强弱。并将雾滴脱离雾滴发生器至水稻叶片瞬时(0s)的接触角作为1.2小节描述模型中的接触角输入值。

1.高速摄影机 2.雾滴发生器 3.载物台 4.照明系统 5.计算机
为尽可能消除叶片长势差异对试验测量结果的影响,本试验进行5次重复测量,每次从5穴水稻植株中随机剪裁一片叶片进行测量,取5次测量结果的平均值作为最终雾滴接触角测量结果。测试条件:气温(24.5±1)℃,相对湿度70%±5%。
1.3.5 表面张力
本文基于Kibron EZ-Pi动态表面张力仪(芬兰)测量3种喷洒溶液的表面张力,由于模型验证试验中无人机的飞行高度为2 m,喷头距离水稻冠层约1.2 m,本文测得的雾滴沉降速度约为11.44 m/s,因此,雾滴沉降至水稻冠层约用70 ms。采用70 ms时雾滴的表面张力作为模型中表面张力的输入值。本文每个溶液的表面张力均进行5次测量,取5次测量结果的平均值作为最终结果。
1.4 模型验证试验方法
为了验证模型计算雾滴在水稻植株上黏附量的准确性,进行了田间验证试验。验证试验在华南农业大学阳江试验基地进行,采用水稻田作为验证试验的喷洒对象,水稻生长参数与1.3.1节描述一致。
试验以3种溶液加浓度为1%罗丹明B的混合溶液为喷洒溶液。喷洒量设置为15 L/hm2,单个喷头的喷洒流量设定为450 mL/min,与1.3.2小节设置的喷洒参数完全相同。无人机飞行速度设定为5 m/s,飞行高度设定为2 m。
植保无人机按上述设定的飞行参数、喷洒参数和规划航线完成整个小区的喷洒作业5 min后,在试验小区随机选择6个区域,每个区域均用镰刀割回0.04 m2的水稻,装入700 mm×500 mm的密封袋内,带回田埂处,共倒入2 L清水,充分振荡清水与水稻,待黏附到水稻植株上的罗丹明B溶液被充分洗脱下来后,将洗脱液倒入50 mL离心管内保存。受相同品种水稻种植面积限制,每个喷洒溶液均进行2次重复试验。
首先,用离心机对离心管内洗脱液进行离心处理,将罗丹明B洗脱液与土质和水稻枯枝等杂质分离,再用0.45m的微孔滤膜对离心后的洗脱液进行二次过滤;最后,采用荧光分光光度计测量洗脱液内的罗丹明B浓度,并采用式(13)计算雾滴在水稻植株上的黏附量。


2 结果与分析
2.1 模型参数
2.1.1 雾滴谱
3种溶液的雾滴粒径分布情况如图5所示,该喷洒条件下,0.5%迈图Target、1%迈飞助剂溶液和清水溶液的雾滴体积中径分别为137.56,137.63和125.86m,所有雾滴粒径在20~300m变化。与清水相比,添加迈飞与迈图Target助剂后,雾滴体积中径均有增加,约增加9.3%。两种助剂溶液的雾滴粒径相差不大。

图5 3种喷洒溶液的雾滴谱
2.1.2 雾滴沉降速度
图6是不同转速的旋翼风场作用下的雾流场。不同旋翼转速作用下的雾流场几乎均呈对称分布,旋翼(喷嘴上方0.42 m处)转速为0时(旋翼系统关闭时),雾滴脱离喷嘴至喷嘴下方0.65 m处基本达到稳定运动状态,运动速度约为1.5 m/s。

注:图6a~6c和图6d~6e分别为喷嘴下方0~0.38 m、0.55~0.80 m内的雾滴速度场分布。
开启旋翼系统并设定旋翼转速为1 000 r/min时,在旋翼风场作用下,除了初始雾化区域(喷嘴下方0.15 m以内)的雾滴速度基本保持不变,雾流场其他区域的雾滴速度整体呈降低趋势,且雾滴更快达到稳定运动状态,雾滴在喷嘴下方0.35 m处已基本处于稳定运动状态,雾滴稳定运动的速度在7 m/s左右波动。与转速为0时雾流场稳定区域的速度相比,旋翼转速为1 000 r/min时的雾滴稳定运动速度增加了366.67%。
旋翼转速增加至1 800 r/min时,雾流场整体速度大幅度增加,雾滴在喷嘴下方0.35 m处也已基本处于稳定运动状态。雾滴达到稳定后的速度在11.5 m/s左右波动。与旋翼转速为0和1 000 r/min条件下的雾流场稳定区域的速度相比,分别增加约663.67%和64.29%。
基于上述分析知,与地面施药技术相比,无人机旋翼风场对雾滴沉降速度有很大影响。无人机旋翼系统开启后,雾滴沉降速度明显增加,且雾滴沉降速度增加程度与无人机旋翼转速呈正比。这表明,无人机旋翼系统开启后,极大地增加了雾滴沉降速度,增大雾滴与作物冠层发生碰撞行为后脱离作物叶片的风险,降低雾滴在作物植株上的黏附率。
试验测试表明,T30植保无人机满载悬停时的旋翼转速为1 800 r/min,在该转速作用下,雾滴在旋翼下方0.77 m左右已达到稳定运动状态。因此,本文将旋翼转速为1 800 r/min条件下,旋翼下方1.2 m(本文测量的雾流场下边缘)处的雾滴沉降速度(=1.463 m/s,=11.346 m/s,=11.44 m/s)作为1.2和1.3小节描述的雾滴拦截模型与雾滴碰撞模型中雾滴水平、竖直和合速度的输入值。
2.1.3 接触角
图7为3种溶液从接触水稻叶片瞬间至60 s内的接触角变化。清水雾滴接触水稻叶片瞬间的接触角为151.083°,5 s内降低至144.626°,并达到稳定状态。1%迈飞助剂溶液雾滴在水稻叶片上的初始接触角为109.179°,10 s内快速下降至81.384°,10 s后,接触角平缓下降,60 s时的接触角为58.772°。0.5%迈图Target助剂溶液雾滴在水稻叶片上的初始接触角为81.020°,5 s内降低至46.115°,30 s时,接触角在9°左右波动,40 s时,雾滴完全铺展开并蒸发掉了。表1为3种喷洒溶液和50%丙酮溶液雾滴分别与5片水稻叶片接触0s时的接触角和5次测量结果的平均值。与清水溶液相比,添加1%迈飞与0.5%迈图Target助剂溶液后,滴在水稻叶片表面的接触角分别降低了27.74%,46.37%。
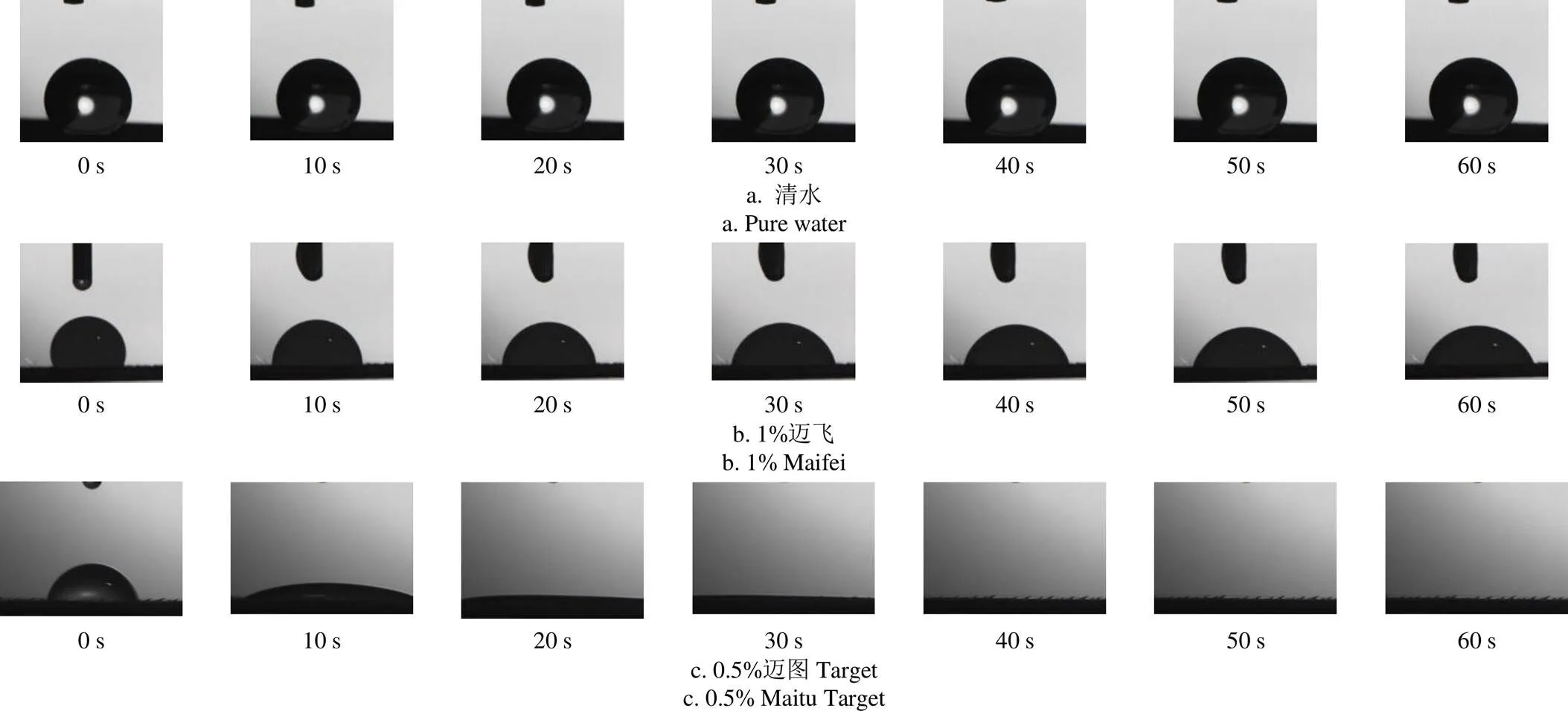
图7 3种助剂溶液在水稻叶片上60 s内的铺展情况
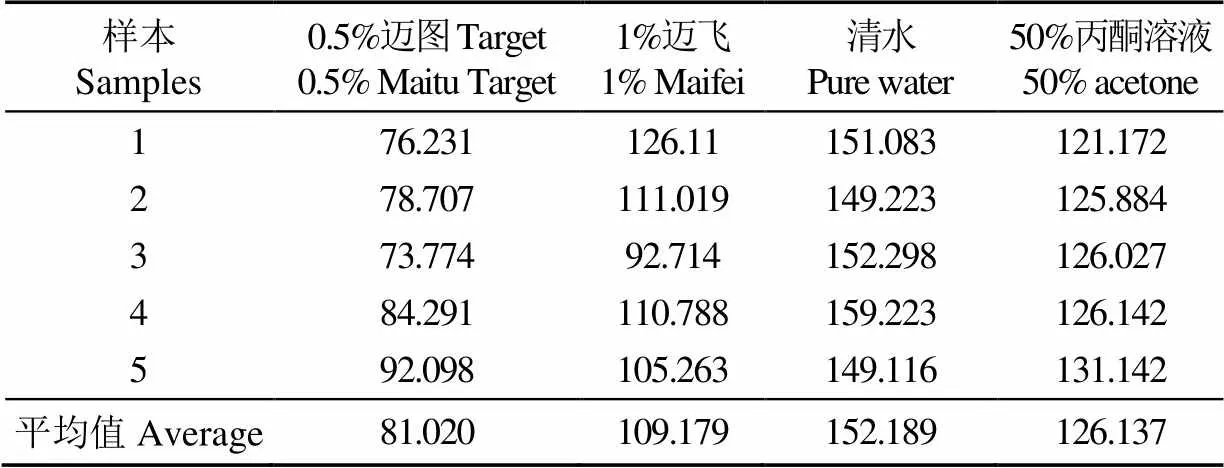
表1 接触角测量结果
由表2知,3个喷洒溶液中,清水的表面张力最大,为67.138×10-3N/m,1%迈飞和0.5%迈图Target助剂溶液的表面张力分别为35.711×10-3和25.369×10-3N/m。与清水相比,添加1%迈飞或0.5%迈图Target助剂溶液后,溶液的表面张力分别降低了46.81%和62.21%。
3个喷洒溶液中,迈图Target助剂溶液的表面张力最小,在水稻叶片上的铺展速度最快,对水稻叶片润湿性的改善效果最好,迈飞溶液次之,但是,与清水相比,迈飞助剂溶液依然对水稻叶片表面润湿性有改善作用。
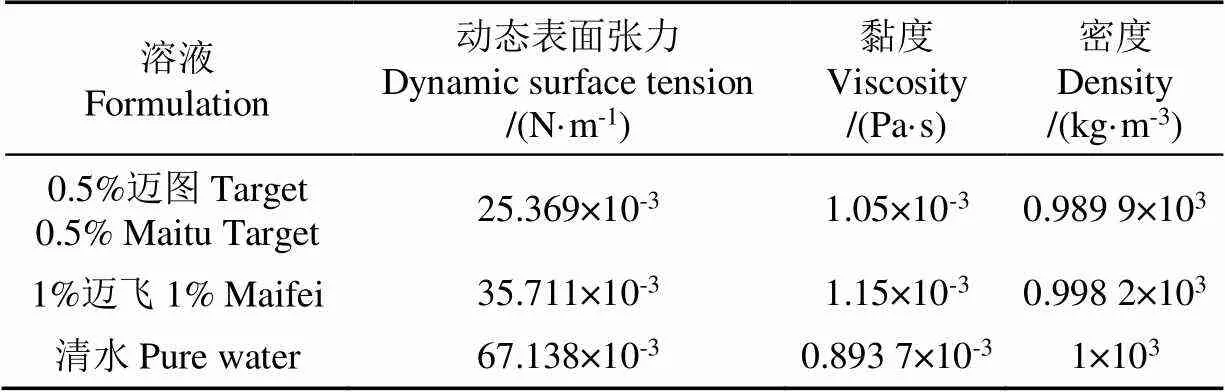
表2 溶液理化性质
2.1.4 LAI与表面张力和黏度
6个水稻子冠层的LAI测量值与ΔLAI计算值如表3所示,表3中ΔLAI的计算结果即为1.2小节描述的雾滴拦截模型中ΔLAI的输入值。3种溶液的表面张力、黏度和密度等参数测量结果参见表2,上述测量工作均在室温下进行。

表3 叶面积指数测量结果
注:ΔLAI为各子冠层的叶面积指数增量。
Note: ΔLAI is leaf area index increment of every canopy.
2.2 模型计算结果与精度验证
表4是旋翼开启与关闭2种条件下,判断雾滴与水稻叶片表面碰撞结果的相关参数的计算结果。k是雾滴在水稻叶片表面完成完整的铺展与回缩运动后剩余的动能,是判断雾滴是否发生反弹的参数,由式(10)计算获得。碰撞参数和crit是判断雾滴是否发生喷溅的参数,分别由1.2.2小节中式(11)和式(12)计算获得。
由于雾滴喷溅发生在雾滴与作物叶片接触后的第1次铺展过程中,雾滴反弹是发生在雾滴于作物叶片表面完成完整的铺展和回缩运动后,所以,首先,应基于参数和crit判断雾滴是否发生喷溅,如果雾滴发生喷溅,雾滴不会再发生反弹;如果雾滴未发生喷溅,根据参数k的正负判断雾滴是否发生反弹。雾滴与水稻叶片表面具体的碰撞结果如表4。

表4 雾滴与水稻叶片的碰撞结果
注:N代表旋翼系统关闭;Y代表旋翼系统开启; 代表该雾滴已发生喷溅(>crit),不会发生反弹,因此,不需要计算k值。
Note: N means that the rotor system is closed; Y means that the rotor system is opened. ‘’ means the droplet has shattered and wouldn’t rebound, so there are nok.
旋翼系统关闭时,雾滴与水稻叶片发生碰撞后,50m以内的清水雾滴直接黏附到水稻叶片表面,大于60m的雾滴均发生反弹,没有雾滴发生喷溅。添加1%的迈飞助剂溶液后,160m以内的雾滴直接黏附到叶片表面,170~220m之间的雾滴发生反弹,250~300m内的雾滴发生喷溅。添加0.5%迈图Target助剂溶液后,180m以内的雾滴直接黏附到水稻叶片表面,大于190m的雾滴发生喷溅,没有雾滴发生反弹。基于上述的数据描述知,与清水溶液相比,添加1%的迈飞助剂或0.5%的迈图Target助剂均可有效抑制雾滴反弹和喷溅情况地发生,可有效提高雾滴在水稻叶片上的黏附情况。
旋翼开启后,清水和1%迈飞助剂溶液的雾滴或发生反弹或发生喷溅,没有雾滴直接黏附到水稻叶片上,0.5%迈图Target助剂溶液中粒径不超过20m的雾滴直接黏附到水稻叶片表面,其他雾滴均发生喷溅,没有雾滴发生反弹。表4的计算结果表明,3种溶液中超过99%的雾滴与水稻叶片发生碰撞行为后,都发生喷溅。对比旋翼开启与关闭2种条件下的数据发现,旋翼开启后,3种溶液雾滴与水稻叶片发生碰撞行为后,雾滴发生喷溅的情况大幅度升高,导致雾滴在水稻叶片上的直接黏附情况明显下降,这是由于旋翼风场显著提高雾滴沉降速度的原因。
表5为采用式(13)计算得到的雾滴在每公顷水稻植株上的黏附量结果。下文均采用3种溶液在每公顷水稻植株上黏附量的平均值进行分析。

表5 雾滴在每公顷水稻植株上的黏附量
旋翼开启与关闭2个条件下,模型预测雾滴被水稻冠层拦截的体积和雾滴在水稻植株上的黏附量情况如表 6。旋翼开启时,清水、1%迈飞和0.5%迈图Target助剂溶液被每公顷水稻冠层拦截的体积分别为13.245、13.261和13.254 L,3种溶液被水稻冠层的拦截率分别为88.30%、88.41%和88.36%。旋翼关闭时,3种溶液被每公顷水稻冠层拦截的体积分别为13.910、13.911和13.911 L,3种溶液被水稻冠层的拦截率分别为92.73%、92.74%和92.74%。无论旋翼开启或者关闭,3种溶液被水稻冠层拦截的概率基本相同。但是,与旋翼关闭时相比,旋翼开启后,3种溶液雾滴被水稻冠层拦截的体积均减少,分别减少0.66、0.65和0.66 L。

表6 每公顷水稻对雾滴的拦截量与黏附量
旋翼关闭时,3种溶液雾滴在每公顷水稻植株上的黏附量依次为0.254 、9.943 和13.210 L;旋翼开启时,3 种溶液雾滴在每公顷水稻植株上的黏附量依次为1.315、7.280 和9.280 L,与旋翼关闭时相比,旋翼开启后,1%迈飞与0.5%迈图Target助剂溶液在水稻植株上的黏附量均降低,且分别降低了26.78%和29.75%。
由于3种溶液在水稻叶片表面的润湿铺展性不同,导致3种溶液在水稻叶片上的最终黏附结果差异较大。与清水溶液在每公顷水稻植株上的黏附量相比,添加1%迈飞或0.5%迈图Target助剂溶液后,雾滴在每公顷水稻植株上的黏附量分别增加了800.78%和1 051.49%。
结合表6知,3种溶液在每公顷水稻植株上黏附量的模型计算结果均高于田间测量结果,分析其原因可能是无人机旋翼风场对水稻冠层有扰动作用,增加了雾滴穿透水稻冠层的概率[40],本文描述的雾滴拦截模型并未考虑无人机旋翼风场的作用,进而高估了水稻冠层对雾滴的拦截率,从而高估了雾滴在每亩水稻植株上的黏附量。
模型预测清水、1%迈飞和0.5%迈图Target助剂溶液在水稻植株上黏附量的准确率分别为48.59%、79.07%和79.29%,模型可用于预测旋翼风场作用下的含助剂药液在水稻植株上的黏附量。
3 结 论
本文采用理论与试验相结合的方法,测试了1%迈飞与0.5%迈图Target助剂溶液对喷嘴雾化性能、雾滴在水稻叶片上润湿铺展性能和雾滴在水稻植株上黏附量的改善效果,分析了无人机旋翼风场对雾滴沉降速度和雾滴在水稻植株上黏附量的影响,建立了预测植保无人机旋翼风场作用下雾滴在水稻植株上黏附量的模型,并验证了该模型计算的准确性。所得结论如下:
1)助剂对溶液物理化学性质、喷嘴雾化性能、雾滴在水稻叶片表面的润湿铺展能力以及雾滴在水稻植株上的黏附量方面均有不同程度的影响。与清水溶液相比,添加1%迈飞与0.5%迈图Target助剂溶液后,溶液表面张力分别降低了46.81%、62.21%;喷嘴雾化雾滴的粒径均呈增大趋势,约增大9.3%;雾滴在水稻叶片表面的接触角依次降低了27.74%、46.37%;雾滴在水稻植株上的公顷黏附量依次增加了800.78%和1 051.49%。
2)无人机旋翼风场对雾滴沉降速度有明显影响,旋翼系统开启后,雾滴沉降速度明显增加,且更快达到稳定运动状态。当无人机旋翼转速由0 增加至1 000、1 800 r/min时,雾滴沉降速度分别增加了366.67%、663.67%。
3)旋翼风场对雾滴沉降速度的增加,极大地提高了雾滴在水稻叶片表面喷溅情况的发生,继而降低了雾滴在水稻植株上的黏附量,旋翼风场开启后,1%迈飞和0.5%迈图Target助剂溶液在水稻植株上的黏附量均降低,且分别降低了26.78%和29.75%。
4)本文建立的雾滴黏附量模型预测清水、1%迈飞和0.5%迈图Target助剂溶液在植株上黏附量的准确率分别为48.59%、79.07%和79.29%。
[1] 许小龙,徐广春,徐德进,等. 植物表面特性与农药雾滴行为关系的研究进展[J]. 江苏农业学报,2011,27(1):214-218.
Xu Xiaolong, Xu Guangchun, Xu Dejin, et al. Research progress on the relationship between characteristics of plant surface and behavior patterns of pesticide droplet[J]. Jiangsu Journal of Agricultural Sciences, 2011, 27(1): 214-218. (in Chinese with English abstract)
[2] 康峰,吴潇逸,王亚雄,等. 农药雾滴沉积特性研究进展与展望[J]. 农业工程学报,2021,37(20):1-14.
Kang Feng, Wu Xiaoyi, Wang Yaxiong, et al. Research progress and prospect of pesticide droplet deposition characteristics[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(20): 1-14. (in Chinese with English abstract)
[3] 张海艳. 植保无人机静电喷雾系统的研制与试验研究[D]. 广州:华南农业大学,2018.
Zhang Haiyan. Experimental Study on the Performance of the Aerial Electrostatic Spray System Applied in UAV[D], Guangzhou: South China Agricultural University, 2018.(in Chinese with English abstract)
[4] Zhan Y, Chen P, Xu W, et al. Influence of the downwash airflow distribution characteristics of a plant protection UAV on spray deposit distribution[J]. Biosystems Engineering, 2022, 216: 32-45.
[5] 张海艳,兰玉彬,文晟,等. 植保无人机旋翼风场模型与雾滴运动机理研究进展[J]. 农业工程学报,2020,36(22):1-12.
Zhang Haiyan, Lan Yubin, Wen Sheng, et al. Research progress in rotor airflow model of plant protection UAV and droplet motion mechanism[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(22): 1-12. (in Chinese with English abstract)
[6] Qi H X, Lin Z X, Zhou J K, et al. Effect of temperature and humidity on droplet deposition of unmanned agricultural aircraft system[J]. International Journal Precision Agricultural Aviation, 2020, 3(3): 41-49.
[7] 文晟,兰玉彬,张建桃,等. 农用无人机超低容量旋流喷嘴的雾化特性分析与试验[J]. 农业工程学报,2016,32(20):85-93.
Wen Sheng, Lan Yubin, Zhang Jiantao, et al. Analysis and experiment on atomization characteristics of ultra-low-volume swirl nozzle for agricultural unmanned aviation vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(20): 85-93. (in Chinese with English abstract)
[8] 王国宾. 植保无人机喷雾质量评价及影响因素分析[D]. 广州:华南农业大学,2019.
Wang Guobin. Spraying Quality Evaluation on Plant Protection UAV[D]. Guangzhou: South China Agricultural University, 2019. (in Chinese with English abstract)
[9] 张海艳,兰玉彬,文晟,等. 植保无人机水稻田间农药喷施的作业效果[J]. 华南农业大学学报,2019,40(1):116-124.
Zhang Haiyan, Lan Yubin, Wen Sheng, et al. Operation effects of unmanned helicopters for pesticide spraying in rice field[J]. Journal of South China Agricultural University, 2019, 40(1): 116-124. (in Chinese with English abstract)
[10] 许童羽,于丰华,曹英丽,等. 粳稻多旋翼植保无人机雾滴沉积垂直分布研究[J]. 农业机械学报,2017,48(10):101-107.
Xu Tongyu, Yu Fenghua, Cao Yingli, et al. Vertical distribution of spray droplet deposition of plant protection multi rotor UAV for japonica rice[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(10): 101-107. (in Chinese with English abstract)
[11] Wang G, Lan Y, Qi H, et al. Field evaluation of an unmanned aerial vehicle (UAV) sprayer: Effect of spray volume on deposition and the control of pests and disease in wheat[J]. Pest Management Science, 2019, 75(6): 1546-1555.
[12] Wang G, Lan Y, Yuan H, et al. Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers[J]. Applied Sciences, 2019, 9(2): 1-16.
[13] 王潇楠. 农药雾滴飘移及减飘方法研究[D]. 北京:中国农业大学,2017.
Wang Xiaonan. Study on Spray Drift and Anti-Drift Method[D]. Beijing: China Agricultural University, 2017. (in Chinese with English abstract)
[14] 曾爱军,王昌陵,宋坚利,等. 风洞环境下喷头及助剂对植保无人飞机喷雾飘移性的影响[J]. 农药学学报,2020,22(2):135-143.
Zeng Aijun, Wang Changling, Song Jianli, et al. Effects of nozzle types, adjuvants and environmental conditions on spray drift potential of unmanned aerial vehicles in a wind tunnel[J]. Chinese Journal of Pesticide Science, 2020, 22(2): 135-143. (in Chinese with English abstract)
[15] 王志翀,Andreas H,Jane B,等. 植保无人机低空低量施药雾滴沉积飘移分布立体测试方法[J]. 农业工程学报,2020,36(4):54-62.
Wang Zhichong, Andreas H, Jane B, et al. Stereoscopic test method for low-altitude and low-volume spraying deposition and drift distribution of plant protection UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(4): 54-62. (in Chinese with English abstract)
[16] 文晟,韩杰,兰玉彬,等. 单旋翼植保无人机翼尖涡流对雾滴飘移的影响[J]. 农业机械学报,2018,49(8):127-137.
Wen Sheng, Han Jie, Lan Yubin, et al. Influence of wing tip vortex on drift of single rotor plant protection unmanned aerial vehicle[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(8): 127-137. (in Chinese with English abstract)
[17] Wen S, Han J, Ning Z H, et al. Numerical analysis and validation of spray distributions disturbed by quad-rotor drone wake at different flight speeds[J]. Computers and Electronics in Agriculture, 2019, 166: 105036.
[18] Tang Q, Zhang R, Chen L, et al. Numerical simulation of the downwash flow field and droplet movement from an unmanned helicopter for crop spraying[J]. Computers and Electronics in Agriculture, 2020, 174: 105468.
[19] Zhang H Y, Lan Y B, Wen S, et al. Numerical analysis of downwash flow field from quad-rotor unmanned aerial vehicles[J]. International Journal Precision Agricultural Aviation, 2020, 3(4): 1-7.
[20] 李继宇,周志艳,兰玉彬,等. 旋翼式无人机授粉作业冠层风场分布规律[J]. 农业工程学报,2015,31(3):77-86.
Li Jiyu, Zhou Zhiyan, Lan Yubin, et al. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 77-86. (in Chinese with English abstract)
[21] Li J, Shi Y, Lan Y, et al. Vertical distribution and vortex structure of rotor wind field under the influence of rice canopy[J]. Computers and Electronics in Agriculture, 2019, 159: 140-146.
[22] Zwertvaegher I K, Verhaeghe M, Brusselman E, et al. The impact and retention of spray droplets on a horizontal hydrophobic surface[J]. Biosystems Engineering, 2014, 126: 82-91.
[23] Massinon M, De Cock N, Forster W A, et al. Spray droplet impaction outcomes for different plant species and spray formulations[J]. Crop Protection, 2017, 56: 65-75.
[24] 宋玉莹,曹冲,徐博,等. 农药雾滴在植物叶面的弹跳行为及调控技术研究进展[J]. 农药学学报,2019,21(Z1):895-907.
Song Yuying, Cao Chong, Xu Bo, et al. Research progress on bouncing behavior and control technology of pesticide droplets at plant leaf surface[J]. Chinese Journal of Pesticide Science, 2019, 21(Z1): 895-907. (in Chinese with English abstract)
[25] 张晨辉,马悦,杜凤沛. 表面活性剂调控农药药液对靶润湿沉积研究进展[J]. 农药学学报,2019,21(Z1):883-894.
Zhang Chenhui, Ma Yue, Du Fengpei, et al. Research progress on the wetting and deposition behaviors of pesticide droplet on Target surfaces with the addition of surfactants[J]. Chinese Journal of Pesticide Science, 2019, 21(Z1): 883-894. (in Chinese with English abstract)
[26] 陈盛德,兰玉彬,Bradley K F,等. 多旋翼无人机旋翼下方风场对航空喷施雾滴沉积的影响[J]. 农业机械学报,2017,48(8):105-113.
Chen Shengde, Lan Yubin, Bradley K F, et al. Effect of Wind field below rotor on distribution of aerial spraying droplet deposition by using multi-rotor UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(8): 105-113. (in Chinese with English abstract)
[27] Zhang H Y, Lan Y B, Xu T Y, et al. Application performance of fuel-powered multi-rotor unmanned aerial vehicles in maize plant protection[J]. International Journal Precision Agricultural Aviation, 2021; 4(2): 36-39.
[28] Teske M E, Thistle H. W, Ice G.G. Technical advances in modeling aerially applied sprays[J]. Transactions of the ASAE, 2003, 46(4): 985-996.
[29] 王双双. 雾化过程与棉花冠层结构对雾滴沉积的影响[D]. 北京:中国农业大学,2015.
Wang Shuangshuang. Studying the Influence of Spray Atomization Process and Cotton Canopy Structure on the Droplet Deposition[D]. Beijing: China Agricultural University, 2015. (in Chinese with English abstract)
[30] Mercer G N, Sweatman W L, Forster W A. A model for spray droplet adhesion, bounce or shatter at a crop leaf surface[J]. Mathematics in Industry, 2010, 945-951.
[31] Boukhalfa H H, Massinon M, Belhamra M, et al. Contribution of spray droplet pinning fragmentation to canopy retention[J]. Crop Protection, 2014, 56(2): 91-97.
[32] Mao T, Kuhn D C S, Tran H. Spread and rebound of liquid droplets upon impact on flat surfaces[J]. Aiche Journal, 1997, 43(9): 2169-2179.
[33] Dorr G J, Kempthorne D M, Mayo L C, et al. Towards a model of spray-canopy interactions: Interception, shatter, bounce and retention of droplets on horizontal leaves[J]. Ecological Modelling, 2014, 290: 94-101.
[34] Moreira, A L N, Moita, A S, Panão, M R. Advances and challenges in explaining fuel spray impingement: How much of single droplet impact research is useful?[J]. Progress in Energy and Combustion Science, 2010, 36(5), 554-580.
[35] Dorr G J, Wang S, Mayo L C, et al. Impaction of spray droplets on leaves: Influence of formulation and leaf character on shatter, bounce and adhesion[J]. Experiments in Fluids, 2015, 56(7): 1-17.
[36] Mundo C, Sommerfeld M, Tropea C. On the modeling of liquid sprays impinging on surfaces[J]. Atomization & Sprays, 1998, 8(6): 625-652.
[37] Forster, W A, Zabkiewicz J A, Kimberley M O, et al. A universal spray droplet adhesion model[J]. Transactions of the ASAE, 2005, 48(4): 1321-1330.
[38] Massinon M, Lebeau F. Experimental method for the assessment of agricultural spray retention based on high-speed imaging of drop impact on a synthetic superhydrophobic surface[J]. Biosystems Engineering, 2012, 112(1): 56-64.
[39] Huet O D, Massinon M, De Cock N, et al. Image analysis of shatter and pinning events on hard-to-wet leaf surfaces by drops containing surfactant[J]. Pest Management Science, 2020, 76: 3477-3486.
[40] 秦维彩,薛新宇,周立新,等. 无人直升机喷雾参数对玉米冠层雾滴沉积分布的影响[J]. 农业工程学报,2014,30(5):50-56.
Qin Weicai, Xue Xinyu, Zhou Lixin, et al. Effects of spraying parameters of unmanned aerial vehicle on droplets deposition distribution of maize canopies[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(5): 50-56. (in Chinese with English abstract)
Modelling approach of spray retention on rice in plant protection using unmanned aerial vehicle
Zhang Haiyan1, Lan Yubin2,3※, Wen Sheng4, Chen Chunling1, Xu Tongyu1, Chen Shengde2,3
(1.,,110866,; 2.,,510642,;3.,510642,; 4.,,510642,)
Spray technology of plant protection Unmanned Aviation Vehicle (UAV) is the highly efficient pesticide application in agricultural aviation, particularly for the zero growth of pesticides. The number, application area and scope of plant protection UAVs are ever increasing in China in the past 10 years. The application performance has also attracted much attention in recent years. Taking the DJI T30 plant protection UAV as the research object, this study aims to investigate the effect of rotor wind field of plant protection UAV and adjuvant on the droplet retention on the rice plant. The pure water, 1% Maifei, and 0.5% Maitu Target adjuvant formulation were taken as the spray formulation. The aviation wind tunnel and Particle Image Velocimetry (PIV) were utilized to measure the spray flow field under the action of the rotor wind field of UAV. Some parameters were evaluated, including the dynamic surface tension, viscosity, and density in the formulations, as well as the dynamic contact angle of droplets on the surface of rice leaves. A quantitative analysis was made to clarify the effect of the rotor wind field on the droplets movement velocity and the retention of droplet on rice, the influence of adjuvant on formulation properties, the nozzle atomization performance, the droplet wetting and spreading performance on the rice leaves. A prediction model of droplet retention on the rice plant was established in the field of plant protection UAV spray technology, especially combining with the droplet interception and the droplet impact model. A field validation test was then conducted to verify the model. The results showed that the adjuvant formulation posed a significant effect on the droplet size, the formulation properties, the nozzle atomization performance, the wetting and spreading performance of the droplets on the surface of rice leaves, as well as the retention of the droplets on the rice plants. The surface tension values of 1% Maifei and 0.5% Maitu Target adjuvant formulations were reduced by 46.81%, and 62.21%, respectively, compared with water; The static contact angle of the droplets on the rice leaves was reduced by 27.74%, and 46.37%, respectively; The retention on the per hectare rice increased by 800.78% and 1 051.49%, respectively. The droplet size increased by at about 9.3%. There was a significant effect of UAV rotor wind field on the droplet movement velocity and the droplet retention on the rice. The droplet movement velocity increased significantly, after the rotor system was turned on and more quickly reached the stable velocity. When the UAV rotor speed increased from 0 to 1 000 and 1 800 r/min, the droplet movement velocity increased by 366.67%, and 663.67% in turn. Compared with the droplet retention on the rice when the rotor system was turn off, the droplet retention of 1% Maifei and 0.5% Maitu Target adjuvant formulation decreased by 26.78%, and 29.75%, respectively, after the rotor system turn on. The accuracies of the retention model were 48.59%, 79.07%, and 79.29%, respectively, in order to predict the retention of the three solutions on the rice plants.
UAV; model; adjuvant; rotor wind field; retention model
10.11975/j.issn.1002-6819.2022.18.005
S252
A
1002-6819(2022)-18-0040-11
张海艳,兰玉彬,文晟,等. 无人机旋翼风场作用下雾滴在水稻植株上的黏附量预测模型[J]. 农业工程学报,2022,38(18):40-50.doi:10.11975/j.issn.1002-6819.2022.18.005 http://www.tcsae.org
Zhang Haiyan, Lan Yubin, Wen Sheng, et al. Modelling approach of spray retention on rice in plant protection using unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2022, 38(18): 40-50. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2022.18.005 http://www.tcsae.org
2022-04-22
2022-07-18
国家自然科学基金项目(31901411);国家自然科学基金面上项目(32271985);广东省引进领军人才项目(2016LJ06G689);广东省自然科学基金项目(2022A1515011008);辽宁省科技厅重点研发项目(2019JH2/10200002)
张海艳,博士生,研究方向为农业航空应用技术。Email:1322366847@qq.com
兰玉彬,教授,博士生导师。研究方向为精准农业航空及航空应用与遥感技术。Email:ylan@scau.edu.cn
猜你喜欢
中国农业信息(2022年1期)2022-05-25
成都信息工程大学学报(2021年5期)2021-12-30
海洋通报(2021年5期)2021-12-21
农业机械学报(2021年11期)2021-12-07
今日农业(2020年20期)2020-11-26
能源(2017年8期)2017-10-18
农业环境科学学报(2017年2期)2017-03-20
通信电源技术(2016年1期)2016-04-16
橡胶工业(2015年8期)2015-07-29
中国洗涤用品工业(2015年9期)2015-02-28
