基于阶段生长PGSA的索穹顶结构预应力优化
2022-02-04 08:32姜正荣苏延石开荣李之吉魏德敏
华南理工大学学报(自然科学版) 2022年11期
姜正荣 苏延 石开荣† 李之吉 魏德敏
(1.华南理工大学土木与交通学院,广东 广州 510640;2.华南理工大学亚热带建筑科学国家重点实验室,广东 广州 510640)
索穹顶是由美国工程师Geiger等[1]提出的一种连续拉、间断压的柔性张力结构体系,具有极高的结构效率,目前已成功应用于众多大型体育场馆中[2-4]。索穹顶结构在自然状态下呈松弛状,不具有刚度,施加预应力方可使其产生刚度并抵抗外荷载,且预应力的大小与分布决定了结构形状与结构刚度[5]。因此,对该类结构进行预应力优化具有十分重要的科学意义。
国内外学者对索穹顶结构的预应力优化进行了相关研究,并取得了一系列成果。文献[6]采用遗传算法,分别以结构自重最小及竖向位移最小为目标,完成了索穹顶结构的预应力优化。文献[7]采用NSGA-II遗传算法,对Kiewitt型索穹顶结构进行多目标优化,得到了最优自应力模态组合系数。文献[8]对Geiger型索穹顶结构的单目标及多目标的不同优化算法进行了对比分析,并探讨了各种算法的适用范围。
模拟植物生长算法(Plant Growth Simulation Algorithm,PGSA)是一种基于植物向光性机理的新型智能优化算法[9],自提出以来已应用于多个行业的优化分析,并逐步加以改进。文献[10]采用非支配排序及构造偏序集等方法对PGSA进行改进,并对多目标旅行商问题进行了求解,对比其他优化算法更具有优势。文献[11]对形态素浓度的计算及新增点的生长策略进行了改进。文献[12]采用PGSA对RFID网络规划模糊覆盖问题进行了研究,指出了该方法的有效性。文献[13]在重新初始化、搜索步长、算法终止判据等方面对PGSA进行改进,并应用于电子干扰资源分配的优化中。近年来,PGSA在工程结构优化领域得到发展与应用,如高层悬挂结构[14]、桁架结构[15]及弦支穹顶结构[16]等。
但是截至目前,涉及PGSA在索穹顶结构优化方面的研究尚鲜见报道,鉴于此,本研究针对原算法的局限性,提出新策略,在此基础上,建立阶段生长PGSA,以此对索穹顶结构进行预应力优化,并与其他算法进行对比,验证其适用性。
1 PGSA基本原理
根据植物生长的原理,PGSA将工程结构优化问题的约束空间视为植物的生长空间,将目标函数视为光源。首先在生长空间内选取一粒种子,即初始生长点x0,其对应一个初始函数值f(x0);然后采用一定的步长,在初始生长点的附近产生节,即下一批可生长点Sm,i(其中i为生长点序号),计算每个可生长点所对应的函数值f(Sm,i),并剔除大于f(x0)的点,最终组成可生长点集合Sm。通过对比该集合中可生长点函数值与初始函数值之间的差距,给予相应的形态素浓度。函数值越优于初始函数值的可生长点,其对应的形态素浓度越高,反之则越低,形态素浓度的计算如式(1)所示:

式中,k为集合Sm中可生长点的个数,Pm,i为第i个可生长点的形态素浓度。
在可生长点集合Sm中,其形态素浓度之和满足:

所有形态素浓度构成了一个概率区间[0,1],每个可生长点对应一部分区域,通过随机搜索的方式选择其中一个区域,将对应的点作为下一次生长点,如图1所示。可生长点的函数值越靠近目标,其形态素浓度越高,所对应的概率区域越大,那么被选为下一次生长点的概率相应就越高。通过这种形态素生长机制,使该植物的枝节反复生长,直到搜索到光源的位置,即函数的最优解。
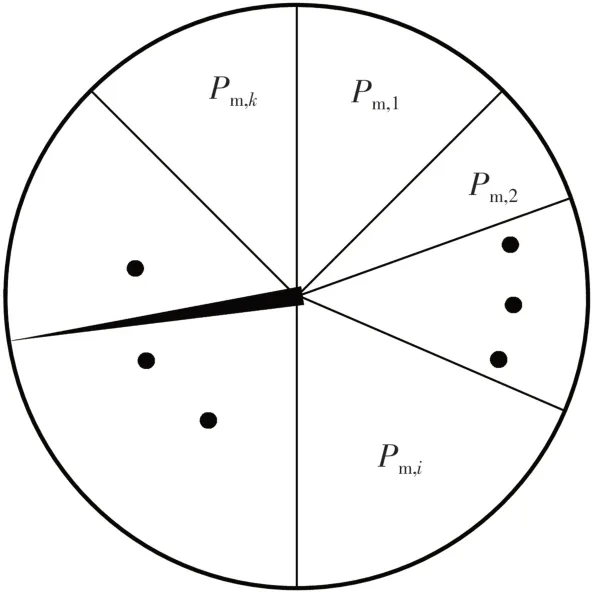
图1 形态素浓度及其对应的生长概率Fig.1 Morphactin concentration and its growth probability
2 PGSA新策略
从多段步长搜索及生长机制等方面,探讨原PGSA的局限性。参考文献[17],以具有两个独立变量的Rastrigin函数为测试算例(图2),其表达式为
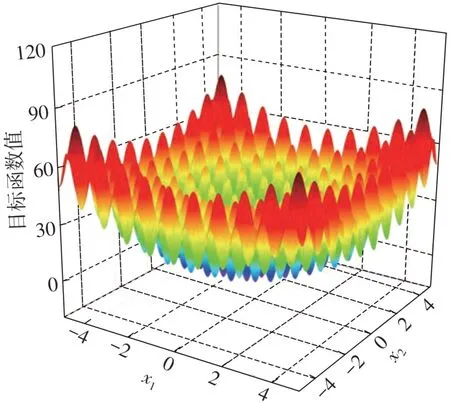
图2 目标函数三维视图Fig.2 Three-dimensional view of objective function

式中:f(x1,x2)为目标函数,即模拟植物生长的光源,两个设计变量分别为x1、x2,将可行域设为-5≤x1,x2≤5,以函数的全局最小值为优化目标,精度为0.1。
由图2可见,该函数有非常多的局部极小点,但仅有一个全局最优解,即x1=x2=0,此时函数值f(x1,x2)=0,达到最小。下文分析中,以图2的函数为基础,对不同参数取值分别运行50次,并记录其优化得到的最小目标函数值的均值及平均生长空间(平均生长点数量),以此对比不同优化机制的优化效果与效率。
2.1 原算法的局限性
2.1.1 步长机制
为探讨原PGSA的局限性,在此提出多段步长生长机制,即采用非固定的步长进行生长,并与常规的单一步长生长机制进行对比。限定最大生长次数为1 000,分别采用原PGSA的单一步长(步长为0.1)、两段步长(大步长为2,生长10次,小步长为0.1)及三段步长(大步长为2,生长10次,中步长为0.5,生长100次,小步长为0.1)进行优化分析,结果见表1,优化效果曲线如图3所示。
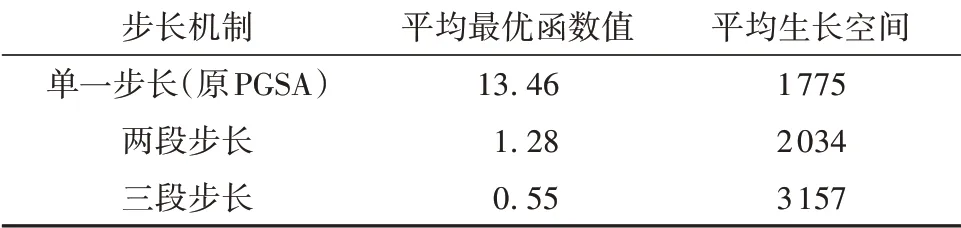
表1 各步长机制的优化结果Table 1 Optimization results of each step mechanism
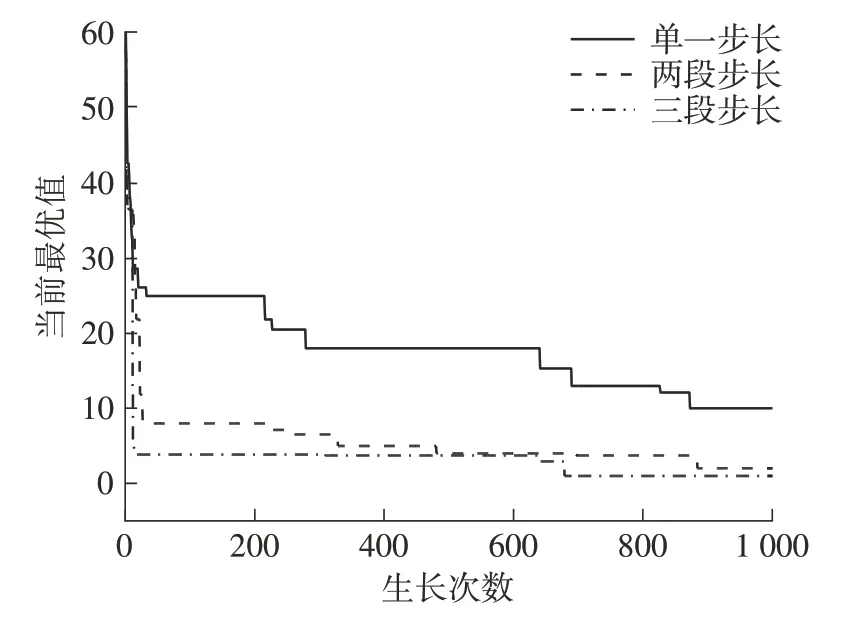
图3 各步长机制的优化效果曲线Fig.3 Curves of optimization effect of each step mechanism
由表1及图3可见,与原PGSA的单一步长相比,两段和三段步长的平均最优函数值较小,且后者更接近全局最优解,但随着步长段数的增加,生长空间也随之迅速扩大。由此表明,采用多段步长生长可提高PGSA的全局搜索能力,但在缺乏有效筛选机制时,该方法必然会增加计算工作量。
2.1.2 生长点分布
在多段步长生长机制的基础上,进一步研究大步长生长次数对优化结果的影响。以两段步长PGSA为例,同样采用大步长为2,小步长为0.1,分别以大步长生长1次与30次进行对比,优化结束后生长点的分布如图4所示。在此将以大步长生长产生的点称为大生长点。
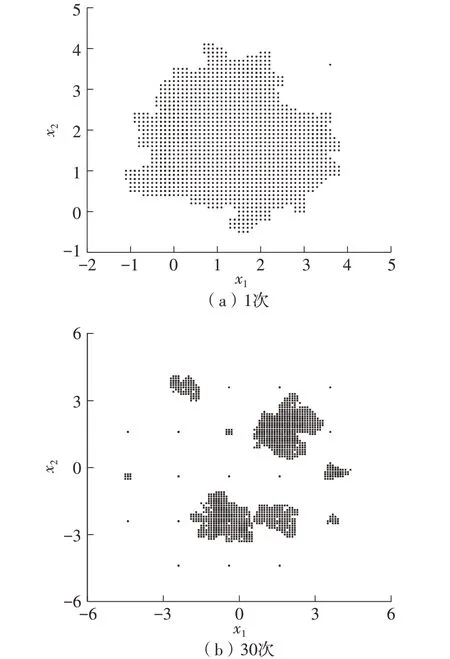
图4 不同大步长生长次数的生长点分布Fig.4 Distribution of growth points with different growth numbers of large step
由图4可见,当大步长生长1次时,大生长点仅分布在x1,x2∈(-2,4)区间内,未能扩散至整个可行域,其全局搜索能力较差;当大步长生长30次时,大生长点扩散至x1,x2∈(-5,5)的范围。当大生长点以大步长为间距完全充满整个可行域,即达到饱和后,每次生长得到的点均会与原有的大生长点重复且被忽略,使该生长点无法在后续以小步长进行生长,从而形成了一片无效区域,生长点无法在其中扩散。由此表明,大步长具有散播生长点、提高全局搜索能力的作用,但若生长次数过多,使其达到饱和后,则反而会弱化全局搜索能力,影响优化结果。
2.2 算法新策略
基于上文分析,从大步长生长扩散机制及生长点筛选机制两方面,提出PGSA的新策略。
2.2.1 大步长生长扩散机制
针对大步长生长次数过多而导致生长点饱和的问题,对大步长采用多倍步长一次性扩散的方式以替代原PGSA中的随机渐进扩散。如图5所示,按原生长机制,初始生长点将向两个维度进行步长为dx的生长,从而产生8个新增的生长点,可跨越2倍步长(2dx)的空间,下一次将从新增生长点中随机选择一个生长点,并重复该生长流程,直至生长点布满整个可行域。多倍步长一次性扩散生长则分别以1~n倍步长进行生长。以3倍步长一次性扩散生长为例,其将向两个维度分别以1、2及3倍步长(3dx)的距离进行一次生长,便可产生48个新增的生长点,所跨越的距离达到6倍步长(6dx)。由于不再进行随机生长,所有的生长点均不会被淘汰。通过该生长扩散机制,并选择合适的大步长,便可得到布满整个可行域的大生长点,起到了散播生长点的作用,且避免了生长点的过早“废弃”。

图5 大步长生长扩散机制Fig.5 Growth diffusion mechanism of large step
2.2.2 生长点筛选机制
在此引入筛选系数w与筛选空间Sw,在每一次搜索时,对已求得的函数值从优至劣进行排序,得到筛选集合R,以该集合中排在第q位的函数值为对比指标,即f(Rq),其中q=Sw×w。将函数值比该对比指标差的新增生长点剔除,以此控制生长空间的规模。在搜索到全局最优解之后,该筛选机制会使可生长点集合逐渐缩小直至无可生长点,从而达到快速收敛并停止运算。
3 阶段生长PGSA
3.1 算法机制及其计算流程
依据上述新策略,提出了基于阶段生长的模拟植物生长算法(阶段生长PGSA),即将植物生长分为多个阶段,并在不同阶段引入相应的生长扩散机制或生长点筛选机制,从而实现该算法的快速收敛,并提高全局搜索能力。
其基本思路为:对初始生长点x0采用大步长进行搜索,并以3倍步长一次性扩散生长,得到布满整个可行域的生长点;随后以中步长进行快速搜索,配合较宽松的筛选机制,以控制生长点的数量;最后以与精度相同的小步长,结合较严格的筛选机制,从而达到快速收敛的目的,且在搜索到满足精度要求的全局最优解后及时终止计算。
该算法流程如图6所示,具体步骤如下:
步骤1定义初始生长点x0,并定义大、中、小步长及其对应的生长次数、筛选系数w与筛选空间Sw。
步骤2计算得到初始生长点x0对应的目标函数值f(x0),以此作为全局最优函数值Fmin的初始值。
步骤3在不同阶段选择不同的步长,对新增生长点对应的函数值f(Sm,i)进行排序,以排在第q位的函数值f(Rq)为对比指标,其中q=Sw×w;将函数值劣于筛选标准(f(Sm,i)>f(Rq))的新增生长点剔除,其余则加入可生长点集合Sm中。
步骤4判断可生长点集合是否为空集,若为空集,则跳转至步骤8,若不为空集,则继续进行下一步。
步骤5找出当前次新增生长点对应的最优函数值fmin,与既有全局最优函数值Fmin对比,判断是否为更优,若是,则更新全局最优函数值Fmin及其对应的最优生长点Xmin。
步骤6对生长点集合中所有的可生长点按式(1)计算形态素浓度,并按概率随机选取下一次的生长点。
步骤7判断是否达到最大生长次数,若未达到,则回归步骤3继续进行优化,若达到,则进行下一步。
步骤8输出最终搜索得到的最优函数值Fmin及其对应的最优生长点Xmin,结束优化流程。
3.2 算例分析
仍以式(3)所示的Rastrigin函数为例,基于图6的流程进行优化。设置大步长为2,以3倍步长进行一次性扩散,中步长为0.5、生长100次,小步长为0.1,最大生长次数为1000。中、小步长对应的筛选系数分别为0.8、0.4,筛选空间均为100。对文中提出的阶段生长PGSA(三段步长+扩散机制+筛选机制)与纯多段步长PGSA(两段步长及三段步长)及原PGSA的单一步长的优化结果进行对比,如图7所示。
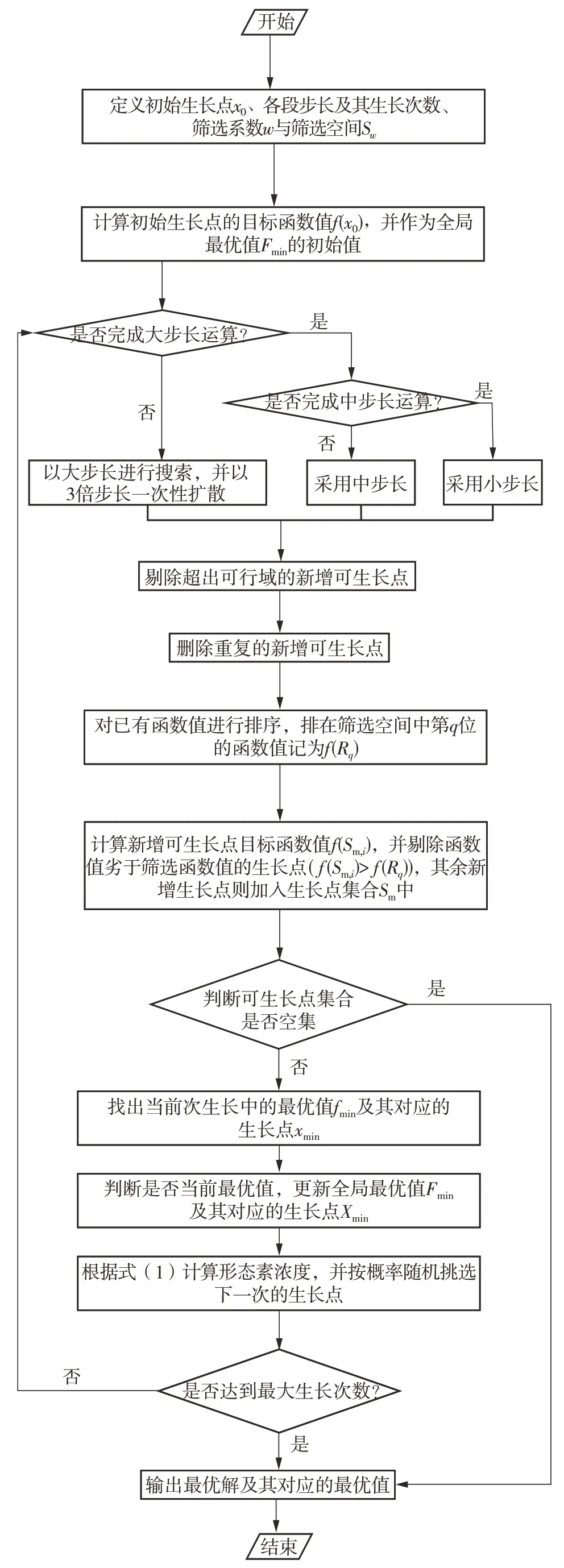
图6 阶段生长PGSA流程图Fig.6 Flow chart of stage growth PGSA
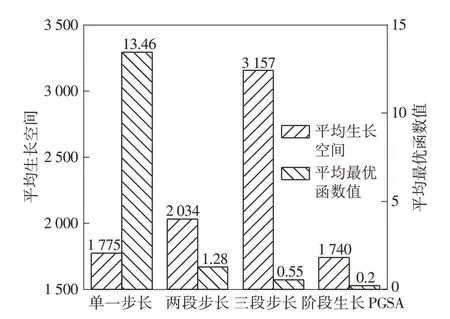
图7 不同PGSA的优化结果Fig.7 Optimization results of different PGSA
由图7可见,阶段生长PGSA通过大范围生长,在提高全局搜索能力的同时避免了生长点的饱和,且由于筛选机制的引入有效地缩小了生长空间,其平均最优函数值及平均生长空间均优于原PGSA。
4 索穹顶结构的预应力优化
在上文分析的基础上,对索穹顶结构的预应力进行优化。该结构的预应力优化有两个特点:一是搜索域中存在大量无解的点,二是最优解相对集中于某些区域。阶段生长PGSA可通过大步长有效跨越这些无解空间,再通过中步长与小步长快速搜索有解的空间,从而提高优化效率。因此,相比于其他优化算法,当阶段生长PGSA应用于索穹顶结构的预应力优化时,其具有显著的优势。
4.1 优化模型
为验证阶段生长PGSA在结构优化中的适用性,以某实际工程为背景,构建图8所示的复合型索穹顶结构,对其进行预应力优化(标高单位为m,其余单位为mm)。结构跨度为100m,矢高为7.5m,设有内拉环及两道环索,周边固定铰支座。拉索采用弹性模量为195 GPa的平行钢丝束;撑杆及内拉环采用Q355B钢材,弹性模量为206 GPa。结构的自应力模态数为2,构件截面面积及各组自应力模态如表2所示。
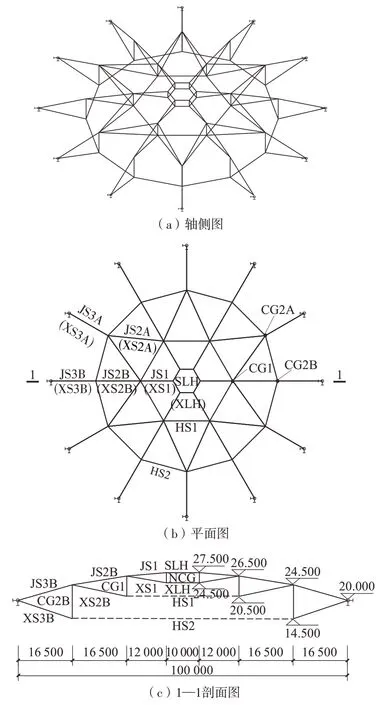
图8 优化模型Fig.8 Optimal model
4.1.1 优化变量
将表2中的两组自应力模态记为{X1}和{X2},并将其与组合系数β1、β2相乘,叠加得到最终的结构初始预应力{T},如式(4)所示。以该组合系数β1、β2为优化变量。
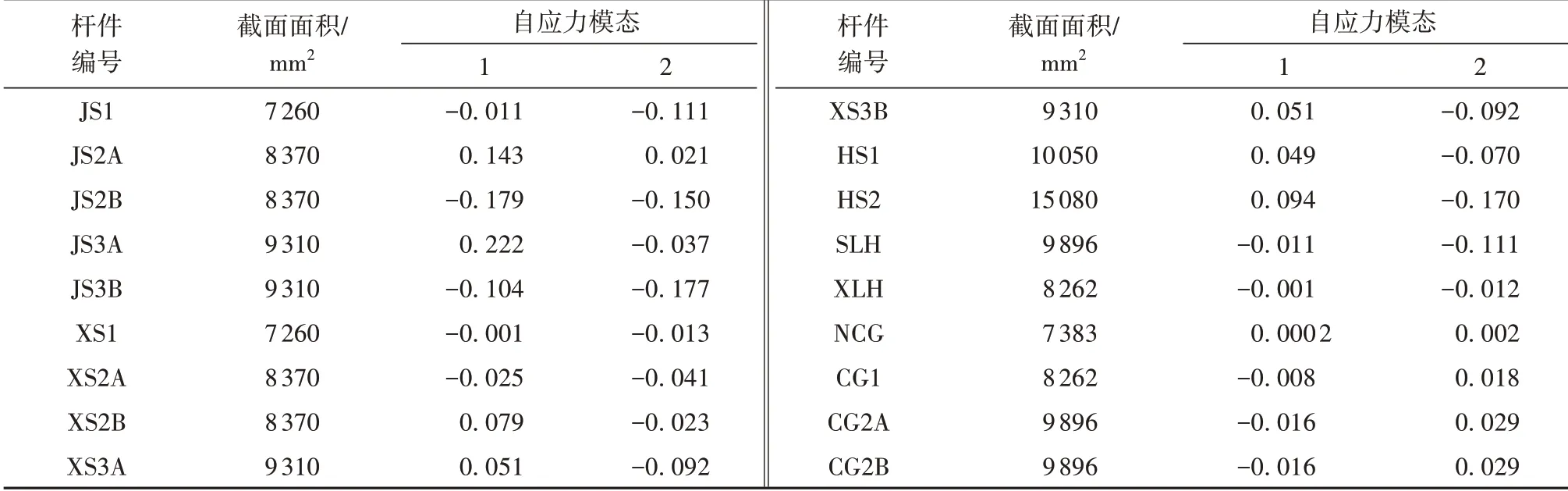
表2 构件截面面积及自应力模态Table 2 Section areas and self-stress modes of members

4.1.2 目标函数
当索穹顶结构张拉完成时,结构的应变能由张拉设备所提供,在满足约束条件下,应变能越小,张拉设备所做的功越少,张拉难度越低,施工越方便,其对应的经济效益越好。因此,在确定自应力模态组合系数时,以结构的初始应变能最小为优化目标:

式中,Ti为第i类杆件的初始预应力,n为结构的杆件类别数,Ei、Ai、li分别为第i类杆件的弹性模量、截面面积及长度,ni为第i类杆件的同类杆件数量。
4.1.3 约束条件
(1)整体可行性
由组合得到的初始预应力,应满足索受拉、撑杆受压且同一圈同类杆件预应力相等的整体可行性。这是索穹顶结构的自有特性,即依据节点平衡条件,索仅受拉力,撑杆仅受压力,且所有杆件的受力均满足对称性。
(2)刚度要求
荷载态时,在自重、附加恒载0.5 kN/m2及不上人屋面活载0.3 kN/m(2全跨布置)的共同作用下,结构的最大节点竖向位移不大于跨度的1/400,荷载组合为1.0恒载+1.0活载的标准组合。
除上述约束条件外,还需对拉索的强度、撑杆的强度及稳定性进行验算。限于篇幅,在此不再赘述,具体详见文献[18]。
4.2 优化结果与分析
基于上文提出的阶段生长PGSA,通过MATLAB与ANSYS的协同编程实现参数化建模、结构计算以及优化算法的执行。将阶段生长PGSA的优化结果与纯多段步长PGSA(两段步长及三段步长)进行对比,参数设定见表3,最大生长次数为1000,筛选空间均为100。经试算,该设定参数下,优化效率及优化效果均较佳,其优化效果曲线如图9所示。
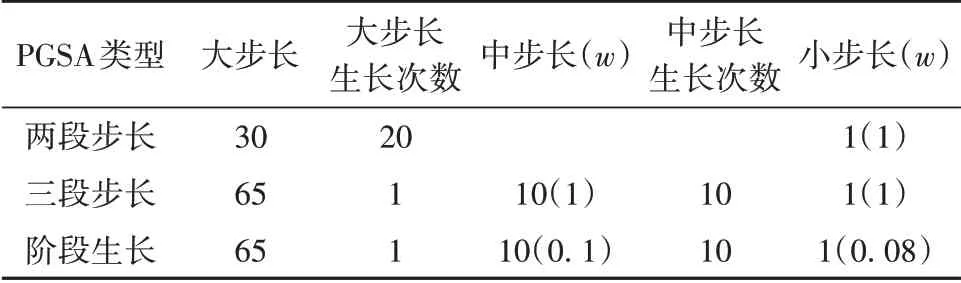
表3 不同PGSA的参数设定Table 3 Parameter setting for different PGSA

图9 不同PGSA的优化效果曲线Fig.9 Curves of optimization effect of different PGSA
由图9可见,采用纯多段步长PGSA(两段步长及三段步长)搜索时,其生长至1000次仍未搜索到全局最优解;阶段生长PGSA运行至第286步便搜索到全局最优解(对应的结构初始应变能f=892.58 kN·m),且在第351步迭代终止。
进一步地,将阶段生长PGSA与多岛遗传算法(MIGA)、自适应模拟退火算法(ASA)及粒子群优化算法(PSO)等优化方法进行对比,优化效果曲线如图10所示(不同算法的每次计算迭代时间基本一致,其关键参数设定详见文献[18])。

图10 不同算法的优化效果曲线Fig.10 Curves of optimization effect of different algorithms
由图10可见,与其他优化算法相比,阶段生长PGSA的计算迭代次数最少,优化得到的结构初始应变能也最小(分别为MIGA的39.7%、ASA的58.9%及PSO的84.1%)。由此表明,该算法具有更高的优化效率及更好的优化效果,从而验证了其适用性。此外,以阶段生长PGSA求得的全局最优解为β1=58×105,β2=-145×105。荷载标准组合下,结构的最大节点竖向位移为247.3 mm,小于结构跨度的1/400(250 mm)。由组合得到的初始预应力如表4所示,满足索受拉、撑杆受压的整体可行性要求,且拉索的强度、撑杆的强度及稳定性验算,均满足相关规范的要求。

表4 阶段生长PGSA优化后的初始预应力Table 4 Initial prestress obtained by stage growth PGSA
5 结论
(1)相比原PGSA的单一步长,多段步长生长机制可提高PGSA的全局搜索能力,但随着步长段数的增加,其计算量相应增大;当大步长生长次数过多时,易造成生长点的饱和,产生无效搜索区域,从而影响优化结果。
(2)针对原PGSA的局限性,提出了阶段生长PGSA,将优化过程分为多个阶段,先引入大步长生长扩散机制,以多倍步长一次性扩散生长的方式实现生长点的散播,再以中步长配合较宽松的筛选机制进行快速搜索,最后以精度要求的小步长与较严格的筛选机制进行收敛。结果表明:与原PGSA相比,阶段生长PGSA可有效增强全局搜索能力、缩小生长空间且避免了生长点饱和的问题。
(3)采用阶段生长PGSA对索穹顶结构进行预应力优化,并与多岛遗传算法、自适应模拟退火算法及粒子群优化算法等优化方法进行对比。结果表明:阶段生长PGSA的计算迭代次数最少,优化得到的结构初始应变能最小,表现出更高的优化效率及更好的优化效果,由此验证了该算法对索穹顶结构预应力优化的适用性。
猜你喜欢
肇庆学院学报(2022年5期)2022-09-29
结构工程师(2022年2期)2022-07-15
结构工程师(2022年2期)2022-07-15
建材发展导向(2022年4期)2022-03-16
成都信息工程大学学报(2021年5期)2021-12-30
教书育人(2020年11期)2020-11-26
中国惯性技术学报(2020年2期)2020-07-24
活力(2019年19期)2020-01-06
--先进无机材料论坛例记(Ⅱ)
中国材料进展(2016年10期)2016-12-26
--先进无机材料论坛例记(Ⅰ)
中国材料进展(2016年10期)2016-12-26