基于非线性轴位控制的单轴机床弹性摩擦精度控制研究
2022-02-02 01:51:26李锐孟亮
机床与液压 2022年24期
李锐,孟亮
(1.常州工程职业技术学院创新创业学院,江苏常州 213164;2.华中农业大学工学院,湖北武汉 430070)
0 前言
对于自动化机床,现代工业制造需要机床轴的高精度定位[1]。然而,一些机械现象(特别是摩擦)可能会影响机床端刀相对于工件的适当位置,从而降低加工质量[2-3]。为了确保工件的位置,系统驱动器配备了考虑到机床轴摩擦特性的位置控制算法[4]。
最先进的解决方案是基于比例(P)和比例积分(PI)级联来控制轴的位置和速度,从而提高机床轴系统的精度和瞬态性能,但轴定位精度在存在额外的相关摩擦时会迅速下降。摩擦对机器轴定位的影响通常通过在P-PI控制中利用适当的前馈项来进行抵消[5]。例如,文献[6]中把永磁同步电机模型的不确定性视为系统的干扰,然后在PI控制策略基础上,对速度环设计一种基于摩擦模型补偿和扰动观测补偿的复合控制方法,改善了系统性能并提高了抗干扰能力;文献[7]中介绍了实验系统的组成和工作原理,建立了刚体模型和二自由度柔性体模型以及系统的Stribeck摩擦模型。在此基础上,设计了P-PI串级控制器以及滑模控制器,对控制系统的跟踪性能进行了仿真和实验测试;文献[8]中通过PI控制精准地控制电子油泵转速,利用调节两个PI环的P、I参数获得比无PI控制的系统更好的转速动态响应,从而更加精准地控制变速器油流量,有效保护变速器并延长其使用寿命;文献[9]中建立了单轴驱动工作台系统的刚性模型,并选取Stribeck摩擦模型来描述系统所受的摩擦,提出了位置环和速度环为PI控制、电流环为P控制的控制方法,分别用摩擦反馈补偿方法和摩擦前馈补偿方法对系统的摩擦进行补偿。然而,这些补偿方案大多假设恒定的摩擦模型参数,如果摩擦参数改变,它们的性能会迅速下降。
对此,本文作者对机床轴定位的位置-速度级联P-PI控制结构进行了扩展研究,利用非线性控制器的摩擦弹性,同时减少直接定位方法带来的设计复杂性,构建了由机床轴和等效双质量振荡器组成的单轴机床系统,给出了具体的控制目标;对物理系统进行数学建模,建立了简化的单轴系统;提出了基于滑模和非线性控制的非线性轴位控制算法,并与传统的P-PI控制进行仿真实验对比分析。
1 单轴机床系统及控制目标
文中构建的单轴机床系统由机床轴(上)和等效双质量振荡器(下)组成,其结构如图1所示。机床轴可以看作是由两个(电机和负载)相互作用的惯性通过一个带有摩擦的轴连接起来的系统。负载侧的惯性和摩擦对应于机床直线轴上的质量和摩擦力矩。其中:ωm和ωl分别为电机角速度和负载角速度;Jm和Jl分别为驱动电机和广义负载惯性;KS为轴刚度;DS为轴的阻尼系数;驱动电机产生的转矩用Tm表示,相互连接的转矩为Tl,N=1为电机与负载的传动比,TF,m和TF,l分别为电机和负载的摩擦力。
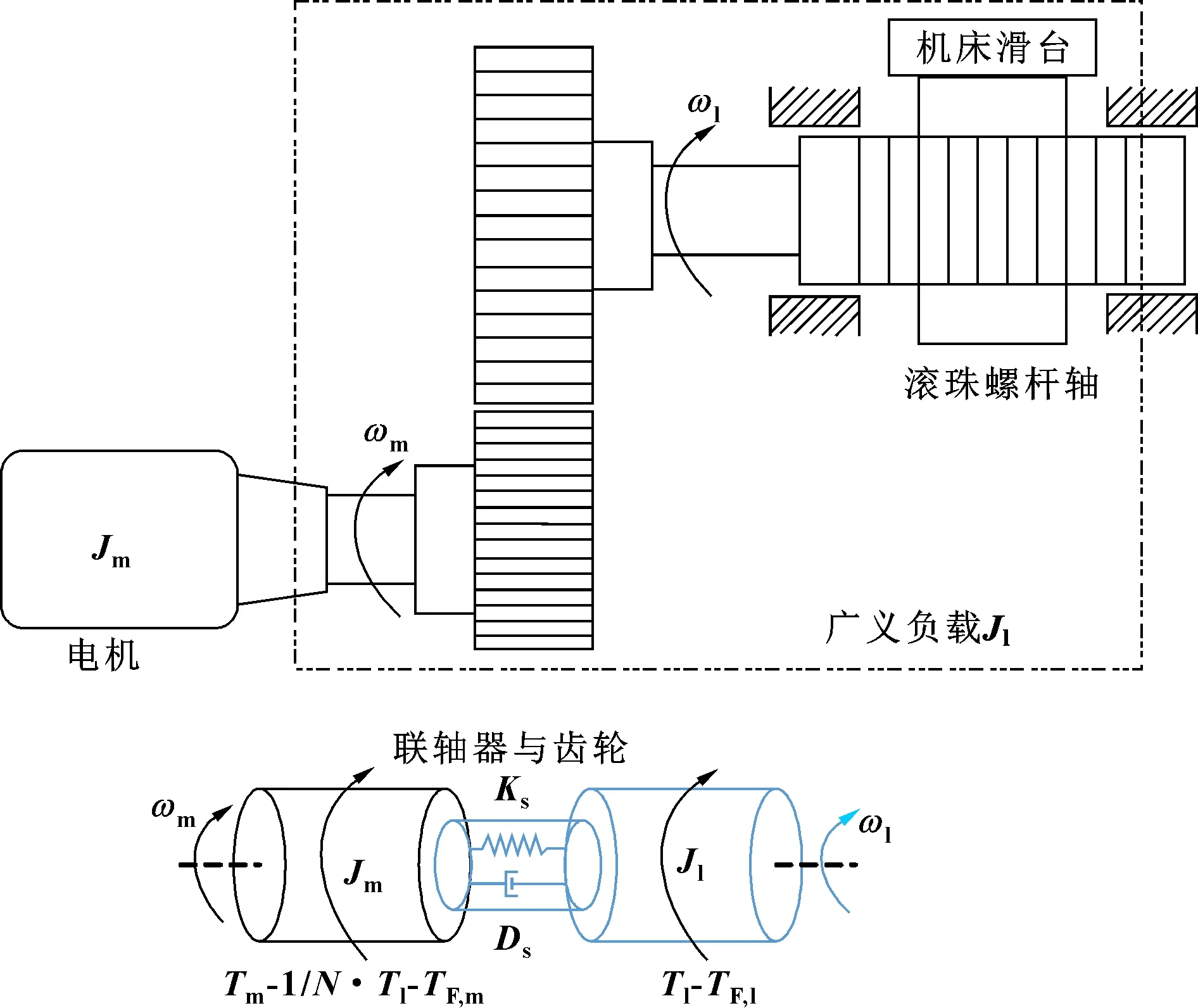
图1 单轴机床系统结构

(1)

2 数学模型

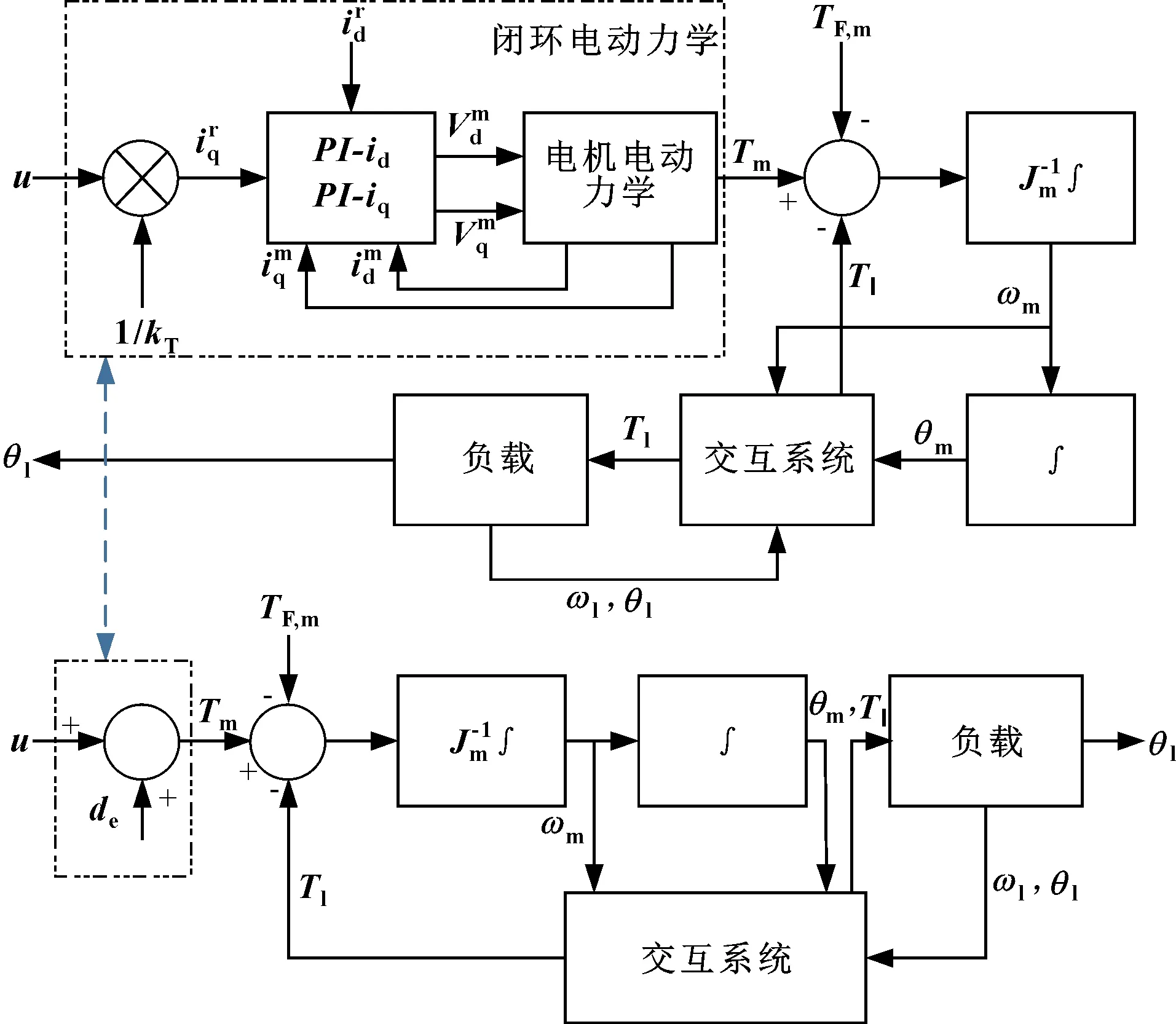
图2 系统的数学模型

表1 系统数学模型中重要的符号及意义
与单轴系统的机械动力学类似,电机的闭环电动力学可以用一阶时间常数系统来近似。因此,在运动控制研究中,通常假设电机产生的转矩是转矩指令u加上转矩干扰de,即Tm=u+de。
因此系统动力学为
(2)
式中:TF,l为负载摩擦。
负载转矩Tl为
(3)
作用在电机上的摩擦力矩TF,m为
TF,m=[TC,m+(TS,m-TC,i)e-(ωm/ωS)]sgn(ωm)+βmωm
(4)
由于Stribeck速度ωS是已知的,则sgn(y)函数定义为
(5)
3 非线性轴位控制方法
3.1 控制方法结构
根据所构建的单轴机床系统及其数学模型,采用改进的非线性轴位控制方法。针对鲁棒轴定位的库仑摩擦问题,提出了两种基于滑模和非线性控制的算法。该控制方法采用了位置-速度级联结构,其结构如图3所示。

图3 控制方法结构

(6)
式中:eθ=θr-θl为轴的定位误差;kpos>0,为P控制器的增益。
由于参考信号的时间导数通常可以达到加速度水平,所以速度参考信号ωr的导数也可以通过公式(6)的微分来计算:
(7)
若eω=ωm-ωr为电机速度的跟踪误差,则位置误差动力学为
(8)
与采用直接负载位置非线性控制器[10]的控制方法相比,该控制结构简化了设计(被控系统是标量),并提供了一定程度的模块化。
3.2 STSMC控制
提出一种基于超螺旋滑模控制(STSMC)的二阶滑模算法代替速度PI控制器的轴定位方法[11-12]。引入抗干扰和有限时间收敛两个有效的滑模控制方法,利用控制律中的不连续项,使滑模控制器对未知动态和扰动具有固有的鲁棒性。
为使驱动轴的速度误差为零,滑动变量s为
s=eω=ωm-ωr
(9)
其动力学为
(10)
STSMC控制律为
(11)
其中:
(12)
速度参考值ωr的导数由公式(7)计算。
3.3 NAC控制
针对机床轴上的电机速度环,提出了速度非线性自适应控制器(NAC)。该控制器作如下假设:
假设未知模型参数ϑ为常数或缓慢变化,即认为其时间导数为零:
(13)
该控制器的特点是根据公式(4)定义了摩擦模型的自适应系数,即电机库仑摩擦系数TC,m、静态摩擦系数TS,m和黏性摩擦系数βm。由于设计简单,轴刚度KS和阻尼系数DS也被考虑为不确定参数,并纳入自适应算法。设ϑ∈p为未知参数向量:

(14)
其中:
(15)
速度误差的动力学为
(16)

φ(x)为回归函数:
(17)
式中:ωS为驱动电机的Stribeck速度。
则NAC的自适应控制律为
(18)
式中:k为正实数;Γ为5×5的正定实数矩阵。
4 仿真实验
采用由STSMC和NAC算法组成的非线性轴位控制方法,在MATLAB/Simulink环境下,对机床轴的电机库仑摩擦的响应信号TC,m进行仿真估计,并与传统的P-PI级联控制进行比较分析。控制器的仿真参数在表2中列出。

表2 控制器仿真参数
4.1 库仑摩擦响应
图4—图6为分别在0.1、0.5、1 Hz的频率下库仑摩擦TC,m估计的结果。可以看出:当库仑摩擦的参考真实值为0.15 N·m时,P-PI控制由于其激励较差,导致控制器性能在参考频率最慢的情况下估计误差较大达到0.03 N·m,且随着时间的增加,其波动明显。而STSMC-NAC非线性轴位控制在不同的库仑摩擦值或参考信号时间增大的情况下,其估计值更接近实际参数值,估计误差较小,且校正波动较小,使系统获得了稳态输出。说明相比于P-PI控制,STSMC-NAC非线性轴位控制具有更丰富的激励,自适应地捕获了由轴的不确定性引起的扰动,从而使库仑摩擦的估计值与实际值的偏差减小,对未知动态和扰动具有更强的鲁棒性。

图4 0.1 Hz下的库仑摩擦
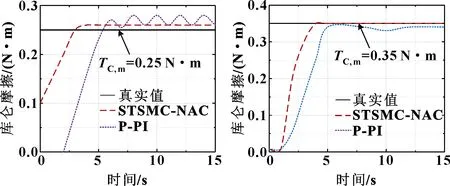
图5 0.5 Hz下的库仑摩擦 图6 1 Hz下的库仑摩擦
4.2 控制器量化标准
为了进一步验证文中所提控制器的性能,给出了量化的比较标准,即最大绝对误差MAE、功率控制CP和复杂性指数CI,如表3所示。Np和Ns分别为库仑摩擦信号可调参数的数量。
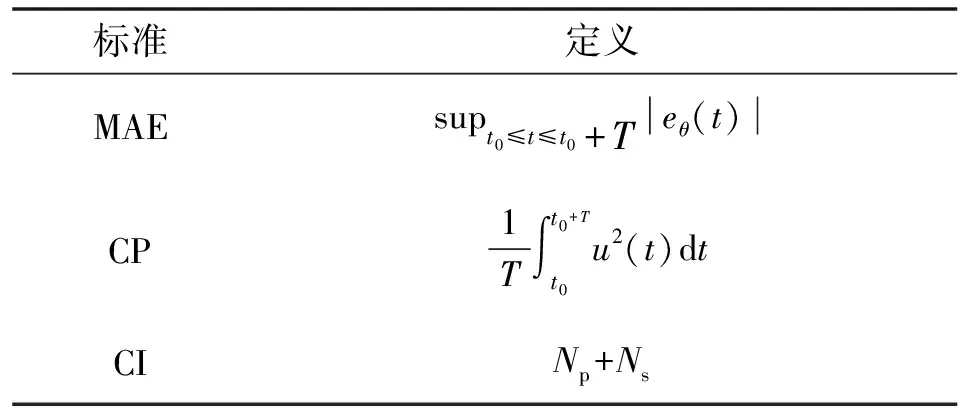
表3 控制器量化标准
PI控制和STSMC-NAC控制的MAE、CP和CI的结果如图7所示。相比于P-PI控制,STSMC-NAC控制下MAE、CP和CI的值都有所降低。在保证MAE和CP分别降低约50%和33.3%的情况下,系统的复杂度CI也没有增加。说明STSMC-NAC非线性轴位控制在所有情况下都优于传统的P-PI级联控制,提高了系统的轴位控制精度,对库仑摩擦进行了良好的精度估计,且控制效率也有所增加。

图7 控制器标准
5 结论
构建了由机床轴和等效双质量振荡器组成的单轴机床系统,其控制目标为单轴机床的弹性摩擦精度控制。对物理系统进行数学建模,建立了简化的单轴系统。提出了基于滑模和非线性控制的STSMC-NAC非线性轴位控制算法,在MATLAB/Simulink环境下,对机床轴的电机库仑摩擦的响应信号进行仿真估计,并与传统的P-PI级联控制进行比较分析。结果表明:STSMC-NAC方法提高了系统的轴位控制精度,对库仑摩擦进行了良好的精度估计,且控制效率也有所增加。
猜你喜欢
中国眼镜科技杂志(2021年11期)2021-12-05 13:08:22
地震研究(2021年1期)2021-04-13 01:04:46
矿产勘查(2020年2期)2020-12-28 00:23:36
国际眼科杂志(2020年9期)2020-09-08 03:58:28
工程与建设(2019年1期)2019-09-03 01:12:38
电子测试(2017年12期)2017-12-18 06:35:42
西安建筑科技大学学报(自然科学版)(2016年5期)2016-11-10 02:39:44
中国地震(2015年1期)2015-11-08 11:11:18
中外医疗(2015年13期)2015-01-11 08:39:39
中国实用医药(2014年34期)2014-12-08 16:19:03